physics - 1 (lecture -1) - indian institute of technology ... - 1 (lecture -1) santabrata das...
TRANSCRIPT

PHYSICS - 1 (Lecture -1)
Santabrata Das
Department of PhysicsIndian Institute of Technology Guwahati
[email protected], Room #: 006
30 July, 2014
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 1 / 48
Section 2
Introduction to the CourseGo to the link ‘http://www.iitg.ernet.in/sbdas/’ .Scroll down and click "Welcome to PH101: July-November, 2014".You will see all course related information there.
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 2 / 48

Topics
Classical MechanicsEnergy �rest mass energy
Relativistic MechanicsEnergy ≥ rest mass energy and de Broglie wavelength � size
Quantum Mechanicsde Broglie wavelength & size and Energy � rest mass energy
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 3 / 48

SyllabusClassical Mechanics (15 Lectures):(1) Review of Newtonian Mechanics in rectilinear coordinatesystem.(2) Motion in plane polar coordinates.(3) Conservation principles.(4) Collision problem in laboratory and centre of mass frame.(5) Rotation about fixed axis.(6) Non-inertial frames and pseudo forces.(7) Rigid body dynamics.
Special Theory of Relativity (5 Lectures):(1) Postulates of STR.(2) Galilean transformation.(3) Lorentz transformation.(4) Simultaneity, Length Contraction, Time dilation.(5) Relativistic addition of velocities.(6) Energy-momentum relationships.
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 4 / 48
Syllabus
Quantum Mechanics (8 Lectures):(1) Two-slit experiment.(2) De Broglie’s hypothesis. Uncertainty Principle.(3) Wave function and wave packets, phase and group velocities.(3) Schrödinger Equation. Probabilities and Normalization.(4) Expectation values. Eigenvalues and eigenfunctions.(5) Applications in one dimension: Particle in a box, FinitePotential well, Harmonic oscillator.
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 5 / 48

Text and Reference BooksTexts:
D. Kleppner and R. J. Kolenkow, An Introduction to Mechanics,Tata McGraw-Hill, 2007.R. Eisberg and R. Resnick, Quantum Physics ofAtoms,Molecules,Solids,Nuclei and Particles, 2nd Ed., John-Wiley,1985.
References:R. P. Feynman, R. B. Leighton, and M. Sands, The FeynmanLectures on Physics, Vol.I, Norosa Publishing House, 1998.J.M. Knudsen and P.G. Hjorth, Elements of Newtonian Mechanics,Springer, 1995.R. Resnick, Introduction to Special Relativity, John Wiley,Singapore, 2000.A. Beiser, Concepts of Modern Physics, Tata McGraw-Hill, NewDelhi, 1995.S. Gasiorowicz, Quantum Physics, John Wiley (Asia), 2000.
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 6 / 48

Classes
Two classes:Tuesday (10.00 AM - 10.55AM and 3.00PM to 3.55PM)Wednesday (11.00 AM - 11.55AM and 2.00PM to 2.55PM)
Primarily presented with slides. Slides will be available online afterthe class.Do not hesitate to interrupt if you have doubts during the class.
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 7 / 48

Tutorials
Tutorial: Friday (8.00AM - 8.55AM)The main purpose of the tutorial is to provide you with anopportunity to interact with a teacher.The teacher will assist you in clearing your doubts and answer yourqueries regarding the course topics.A problem sheet will be given to you for your practice. Theseproblems also indicate the difficulty level of the examinations.Your are expected to attempt these problems before you come totutorial class. Ask your doubts regarding these problems to yourteacher during the tutorial class.The teacher may or may not solve all the problems in the tutorialclass. In case you find a problem very difficult, do ask your teacherto help you.
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 8 / 48

Evolutions
Two Quizzes each of 10% weightageMid-semester Exam of 30% weightageEnd-semester Exam of 50% weightage
Pass marks >30
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 9 / 48

Class Manners
Maintain SilenceAttendance RuleMobile Phone Policy
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 10 / 48

Section 2
Review of Kinematics
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 11 / 48
Kinematics in One Dimensions
The motion of the particle is described specifying the positionas a function of time, say, x (t).
The instantaneous velocity is defined as
v (t) =dx(t)
dt= lim
∆t→0
x(t+ ∆t)− x(t)
∆t(1)
and instantaneous acceleration, as
a (t) =dv(t)
dt= lim
∆t→0
v(t+ ∆t)− v(t)
∆t(2)
=d2x(t)
dt2
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 12 / 48

Simple Example
If x (t) = sin(t), then v (t) = cos(t) and a (t) = −sin(t).
Position
Velocity
Acceleration
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 13 / 48

Kinematics in One Dimension
Usually the x (t) is not known in advance!
However, the acceleration a (t) is known at all times t > t0(=giventime), and at t0, position x (t0) and velocity v (t0) are known.
The formal solution to this problem is
v (t) = v (t0) +
ˆ t
t0
a(t′)dt′
x (t) = x (t0) +
ˆ t
t0
v(t′)dt′
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 14 / 48
Constant Acceleration
Let the acceleration of a particle be a0, a constant at all times. If, att = 0 velocity of the particle is v0, then
v (t) = v0 +
ˆ t
0a0dt
= v0 + a0t
And if the position at t = 0 is x0,
x (t) = x0 + v0t+1
2a0t
2 (3)
These are familiar formulae.
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 15 / 48

Kinematics in One Dimension
More complex situations may arise, where an acceleration isspecified as a function of position, velocity and time, a (x, x, t).In this case, we need to solve a differential equation
d2x
dt2= a (x, x, t)
which may or may not be simple.
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 16 / 48

Solution methodology
Simple integrationAccleration is function of t alone → dv
dt = a(t)
Accleration is function of x alone → dvdt = dv
dxdxdt = v dv
dx = a(x)
Accleration is function of v alone → dvdt = a(t)→ dt = dv
a(v)
First ordered differential equation
Acceleration is function of v and t → dv
dt= a(v, t)
Acceleration is function of v and x → vdv
dx= a(v, x)
Second ordered differential equation: other cases
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 17 / 48
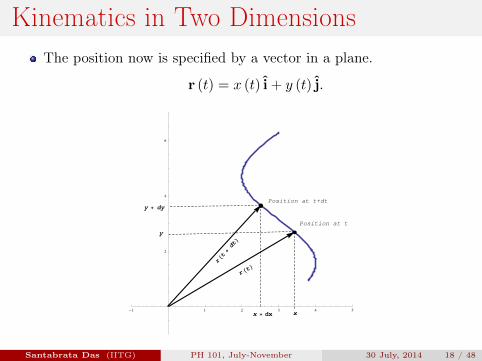
Kinematics in Two DimensionsThe position now is specified by a vector in a plane.
r (t) = x (t) i + y (t) j.
xx + dx
y
y + dy
rHtL
rHt+
dtL
Position at t
Position at t+dt
-1 1 2 3 4 5
2
4
6
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 18 / 48

Kinematics in Two Dimensions
The instantaneous velocity vector is defined as
v (t) =d
dtr(t)
= limdt→0
r(t+ dt)− r(t)
dt
= limdt→0
x(t+ dt)− x(t)
dti + lim
dt→0
y(t+ dt)− y(t)
dtj
=dx(t)
dti +
dy(t)
dtj
Simillarly, we can show that
a (t) =d2x(t)
dt2i +
d2y(t)
dt2j
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 19 / 48
Kinematics in Two Dimensions
Velocity and Acceleration are vector quantities.Formal solutions can be written in exactly the same way as in caseof one dimensional motion.Typical problem, however, may specify acceleration as a functionof coordinates, velocities etc.In this case, we have to solve two coupled differential equations
d2x
dt2= ax(x, y, x, y, t)
d2y
dt2= ay(x, y, x, y, t)
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 20 / 48
Projectile Motion
A ball is projected at an angle θ with a speed u. The net acceleration isin downward direction. Then ax = 0 and ay = −g. The equations are
d2x
dt2= 0
d2y
dt2= −g
We know the solutions.
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 21 / 48
Charged Particle in Magnetic Field
A particle has a velocity v in xy plane. Magnetic field is in z direction.The acceleration is given by q
mv ×B. The equations are
d2x
dt2=
qB
mvy
d2y
dt2= −qB
mvx
Solution is rather simple, that is circular motion in xy plane.
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 22 / 48

Section 3
Polar Coordinate System
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 23 / 48

Cartesian CoordinateIn Cartesian coordinate system each point is uniquely specified in aplane by a pair of numerical coordinates, measured in the same unit oflength.
x
y
P
X
Y
O
Each point P is identified with its unique x and y coord: P = P (x, y).Ranges: x, y ∈ (−∞,∞).
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 24 / 48

Cartesian CoordinateHorizontal lines
X
Y
-1.6
-1.2
- 0.8
- 0.4
0.
0.4
0.8
1.2
1.6
Vertcial lines
X
Y
-1.6
-1.2
- 0.8
- 0.4
0.
0.4
0.8
1.2
1.6
-1.6-1.2- 0.8- 0.4 0. 0.4 0.8 1.2 1.6
Clearly, each point has separate coordinates.
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 25 / 48

Cartesian Coordinate
Geometric definition of magnitude anddirection of vectors allow us to defineoperations: addition, subtraction, andmultiplication by scalars.Often a coordinate system is helpful as itis easier to manipulate the coordinates of avector, than manipulating its magnitudeand direction.To determine vector coordinates, the firststep is to translate the vector so that itstail is at the origin and head will be atsome point P (x, y).
P
xO
y
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 26 / 48

Cartesian Coordinate
Position vector of P is r = ix+ jy.Change x only keeping y fixed suchthat P moved to Q.The “direction” of increasing thevector is defined as
ex =dr
dx
This vector is not necessarily normalizedto have unit length, but from it we canalways construct the unit vector as
i =ex|ex|
=1
|dr/dx|dr
dx
P Q
x dx + xO
y
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 27 / 48

Cartesian Coordinate
Therefore, unit vectors are defined as
i =1
|dr/dx|dr
dx
and
j =1
|dr/dy|dr
dy
P
j
i
O
y
x
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 28 / 48
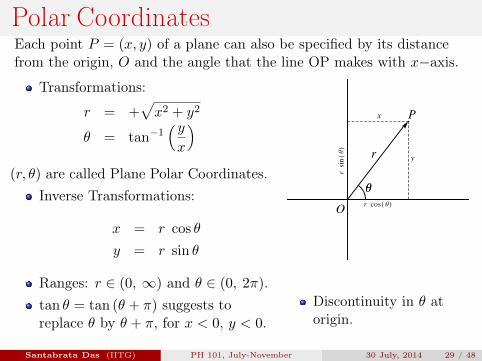
Polar CoordinatesEach point P = (x, y) of a plane can also be specified by its distancefrom the origin, O and the angle that the line OP makes with x−axis.
Transformations:
r = +√x2 + y2
θ = tan−1(yx
)(r, θ) are called Plane Polar Coordinates.
Inverse Transformations:
x = r cos θ
y = r sin θ
Ranges: r ∈ (0, ∞) and θ ∈ (0, 2π).tan θ = tan (θ + π) suggests toreplace θ by θ + π, for x < 0, y < 0.
P
r
Θ
r cosH Θ L
rsinHΘL
Θ
O
y
x
Discontinuity in θ atorigin.
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 29 / 48

Polar CoordinatesConstant r curves
0.4
0.8
1.2
1.6
Constant r and θ curves
0.4
0.8
1.2
1.6
-
Π2
-
3Π8
- Π
4
-Π
8
0
Π
8
Π
4
3Π
8
Π 2
Unit vectors are perpendicular to constant coordinate curves
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 30 / 48

Unit Vectors
In Cartesian coordinate, PV of P is r = xi + yj. We find a set of twounit vectors r and θ.
Θ`
Θ`
Θ`
r`
r`
Θ`
Θ
Θ
Θ
i
j
By Coordinate transformation,r = r cos θi + r sin θj
Unit vectors are defined as,
r =1
|drdr |dr
dr= i cos θ + j sin θ
θ =1
|drdθ |dr
dθ= −i sin θ + j cos θ
And
i = cos θr− sin θθ
j = sin θr + cos θθ
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 31 / 48

Unit Vectors
r`
r`
Θ`
Θ`
30
45
Unit vectors at a point P depend onθ coordnate of PExample: If P ≡ (1, π/6) , then
r =1
2
(√3i + j
)θ =
1
2
(−i +
√3j)
Example: Let P ≡ (1, π/4) , then
r =1√2
(i + j
)θ =
1√2
(−i + j
)Note that everywhere, r ⊥ θ .
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 32 / 48
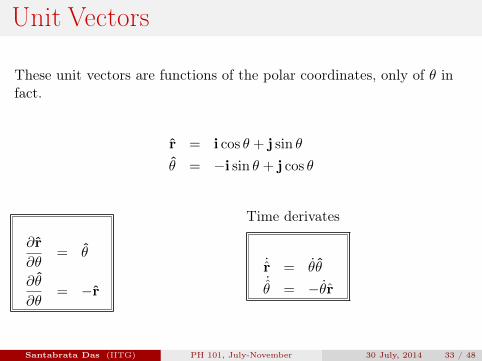
Unit Vectors
These unit vectors are functions of the polar coordinates, only of θ infact.
r = i cos θ + j sin θ
θ = −i sin θ + j cos θ
∂r
∂θ= θ
∂θ
∂θ= −r
Time derivates
˙r = θθ˙θ = −θr
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 33 / 48

Section 4
Motion in Plane Polar Coordinates
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 34 / 48

Motion in Polar Coordinates
Suppose a particle is travellingalong a trajectory given by r(t).Now the position vector
r (t) = x (t) i + y (t) j
= r (t) (i cos (θ (t)) + j sin (θ (t)))
= r (t) r (θ (t))
r (t) depends on θ implicitlythrough r vector.
r(t+dt)
r(t)
θ
θ + δθ
We need to know θ to see how r is oriented. We need to know r to seehow far we are from the origin.
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 35 / 48
Motion in Polar Coordinates
Then the velocity vector
v =dr
dt
=d
dt[r (t) r (θ (t))]
=dr
dtr + r
dr
dθ
dθ
dt
= rr+rθθ
Radial velocity = rr
Tangential velocity = rθθ
θ is called the angular speed.
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 36 / 48

Motion in Polar Coordinates
The Acceleration vector
a =dv
dt
= rr + rdr
dt+ rθθ + rθθ + rθ
dθ
dt
= rr + rθθ + rθθ + rθθ − rθ2r
=(r − rθ2
)r +
(rθ + 2rθ
)θ
Radial component: r is the linear acceleration in radial direction.The term −rθ2r is usual centripetal acceleration.Tangential component: rθ is the linear acceleration in thetangential direction. The term 2rθθ is called Coriolis acceleration.
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 37 / 48

Uniform Linear Motion
-6 -4 -2 0 2 4 6
1
2
3
4
Position Vector: r(t) = 2ti + j.Polar coordinates
r(t) =√x(t)2 + y(t)2
=√
4t2 + 1
andtan θ(t) = 1/2t -2 -1 0 1 2
1
2
3
4
5
Tangential
Radial
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 38 / 48

Uniform Linear Motion
-6 -4 -2 0 2 4 6
1
2
3
4
-6 -4 -2 0 2 4 6
1
2
3
4
-6 -4 -2 0 2 4 6
1
2
3
4
-6 -4 -2 0 2 4 6
1
2
3
4
-6 -4 -2 0 2 4 6
1
2
3
4
-6 -4 -2 0 2 4 6
1
2
3
4
Velocity Vector: v(t) = 2i.
r =2t√
4t2 + 1
θ =2
4t2 + 1
v(t) =2t√
4t2 + 1r− 2√
4t2 + 1θ
-2 -1 1 2
-2
-1
1
2
Tangential
Radial
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 39 / 48

Circular Motion
In a circular motion, r = R = Constant . Then, r = r = 0 . Thus
v = Rθθ
a = −Rθ2r +Rθθ
Consider a special case of uniform circular motion: θ = 0 .Speed is constant, and velocity is tangentialAcceleration is radial (central)
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 40 / 48
Circular MotionConsider a case of a non-uniform circular motion in whichθ = α = Constant
movie
Here,
v = Rθθ = Rαtθ
a = −Rθ2r +Rθθ
= −Rα2t2r +Rαθ
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 41 / 48

Circular MotionConsider a case of a non-uniform circular motion in whichθ = α = Constant
Here,
v = Rθθ = Rαtθ
a = −Rθ2r +Rθθ
= −Rα2t2r +Rαθ
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 42 / 48

Circular Motion: Hammer Throw
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 43 / 48

Spiral MotionConsider a particle moving on a spiral given by r = aθ with a uniformangular speed ω. Then r = aθ = aω.
v = aωr + aω2tθand a = −aω3tr + 2aω2θ
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 44 / 48

Central Acceleration
Central Accelerations
When the acceleration of a particle points to the origin at all times andis only function of distance of the particle from the origin, theacceleration is called central acceleration.
a = f(r)r
Examples are 1/r2 (Gravitational and Electrostatic), 1/r6
(Van-dar-Waals), kr (Spring) etc.Angular momentum of the particle remains constant.
rθ + 2rθ =d
dt(r2θ) = 0
r2θ = constant during motion.
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 45 / 48
ExampleAcceleration of a particle is given by a (x) = −ω2x. And at time t = 0,position is A and velocity is zero.
dv
dt= −ω2x
dv
dx
dx
dt= −ω2x
vdv
dx= −ω2x
After integrating this, we get
v = ω√A2 − x2 ≡ dx
dt(4)
Finally the solution for x is
x(t) = A sin(ωt) (5)
We have considered this motion earlier.Santabrata Das (IITG) PH 101, July-November 30 July, 2014 46 / 48

Air ResistanceSuppose a ball is falling under gravity in air, resistance of which isproportional to the velocity of the ball.
a (y) = −g − ky
If the ball was just dropped, velocity of the ball after time t then
v(t) = −gk
(1− e−kt
)
time
g/k
velocity
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 47 / 48

Polar Coordinates
Santabrata Das (IITG) PH 101, July-November 30 July, 2014 48 / 48