performances in electric automobiles department of mechanical engineering university of zaragoza 1...
Post on 21-Dec-2015
216 views
TRANSCRIPT
1
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
Department of Mechanical EngineeringUniversity of Zaragoza
ANALYSIS OF PERFORMANCES IN ELECTRIC AUTOMOBILES
PROF. EMILIO LARRODÉUniversity of Zaragoza
2
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
Department of Mechanical EngineeringUniversity of Zaragoza
ANALYSIS OF PERFORMANCES IN ELECTRIC AUTOMOBILES
1. TYRES
2. MECHANICAL RESISTANCE
3. POWER
4. TRANSMISSION
5. CHARACTERISTIC CURVES
6. ADHERENCE
7. ENERGETIC DESIGN
8. WORKING CICLES
3
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
Department of Mechanical EngineeringUniversity of Zaragoza
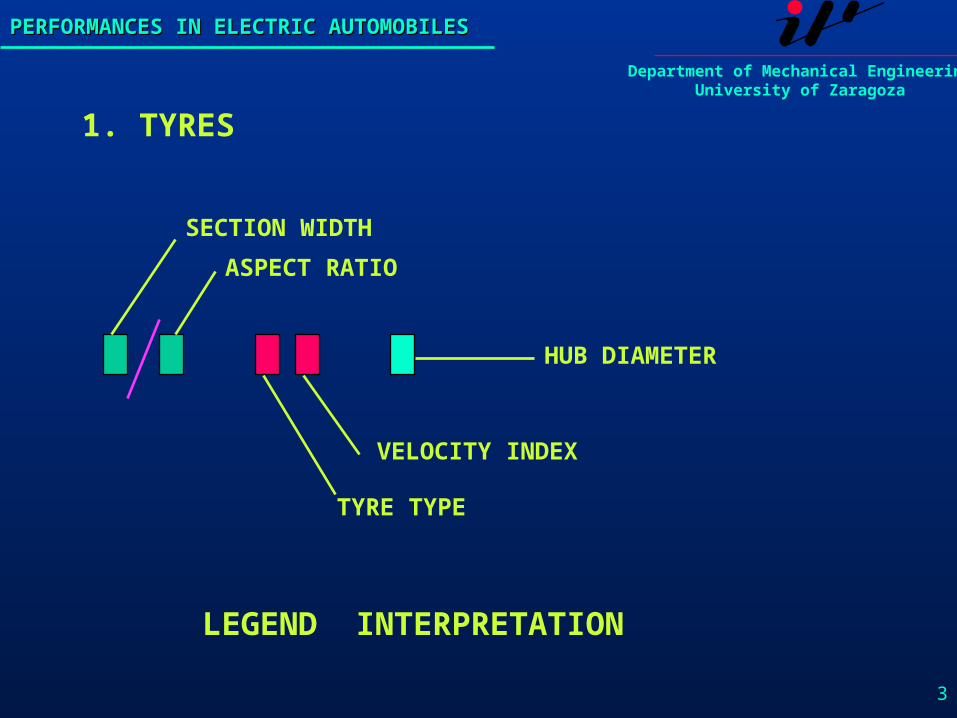
1. TYRES
LEGEND INTERPRETATION
SECTION WIDTH
ASPECT RATIO
HUB DIAMETER
VELOCITY INDEX
TYRE TYPE
4
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
Department of Mechanical EngineeringUniversity of Zaragoza
1) Section width. Section width of the undeformed tyre, (mm).
2) Hub diameter. Diameter of the hub (inches) (“).
3) Aspect ratio (profile). Ratio height/section width of the tyre, (in %).
4) Section height. Height of the tire section (in mm).
5) External wheel diameter. External diameter of the undeformed tyre (in mm). It can be obtained adding to the hub diameter, the value of the height of the section multiplied by two.
6) Tyre composition. This factor depends on rolling resistance. Usually there are two possibilities:
- R = radial (minor rolling resistance)
- D = diagonal (for trucks and lorries)
profileheight
width
5
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
Department of Mechanical EngineeringUniversity of Zaragoza
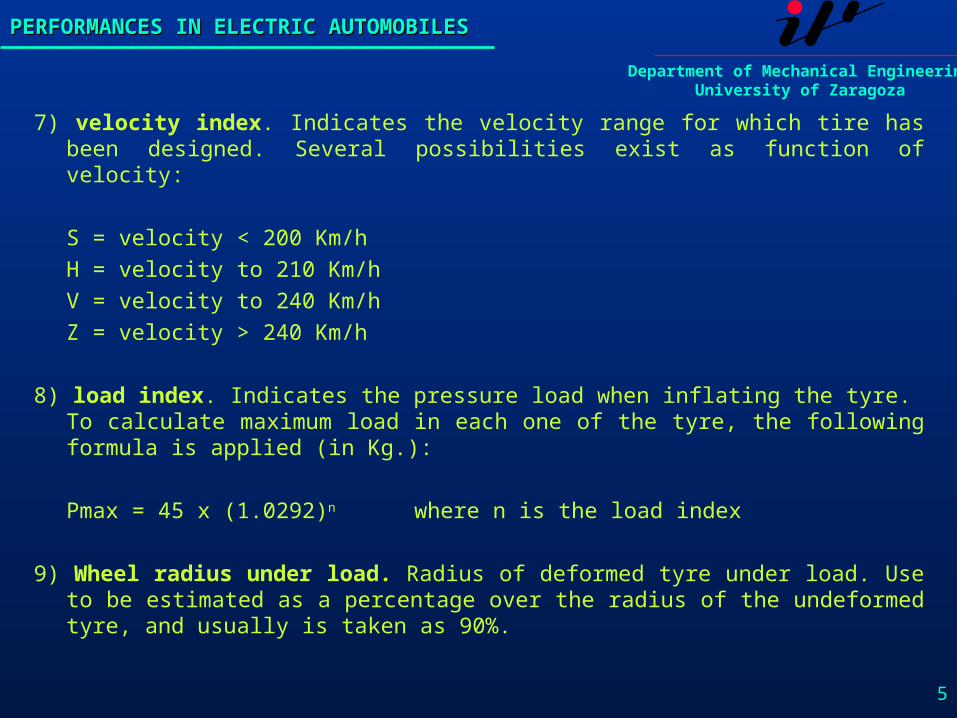
7) velocity index. Indicates the velocity range for which tire has been designed. Several possibilities exist as function of velocity:
S = velocity < 200 Km/h
H = velocity to 210 Km/h
V = velocity to 240 Km/h
Z = velocity > 240 Km/h
8) load index. Indicates the pressure load when inflating the tyre. To calculate maximum load in each one of the tyre, the following formula is applied (in Kg.):
Pmax = 45 x (1.0292)n where n is the load index
9) Wheel radius under load. Radius of deformed tyre under load. Use to be estimated as a percentage over the radius of the undeformed tyre, and usually is taken as 90%.

6
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
Department of Mechanical EngineeringUniversity of Zaragoza
Example 1. Name main characteristics of a tyre with following legend:
145/70 SR 13 (load index = 76).
1) section width = 145 mm.
2) hub diameter = 13” (330.2 mm.)
3) aspect ratio (profile) = 70% 0.7
4) section height = profile x width = 0.7 x 145 = 101.5 mm
5) wheel diameter = hub diameter + 2 x height
= 330.2 + 2 x 101.5 = 533.2 mm
6) tyre type = R radial
7) velocity index = S for velocities < 200 Km/h
8) load index = 76 Pmax = 45 x (1.0292)76 = 401.04 Kg.
9) wheel radius under load = 0.9 x 533.2/2 = 0.9 x 266.6 = 239.94 mm.
7
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
Department of Mechanical EngineeringUniversity of Zaragoza
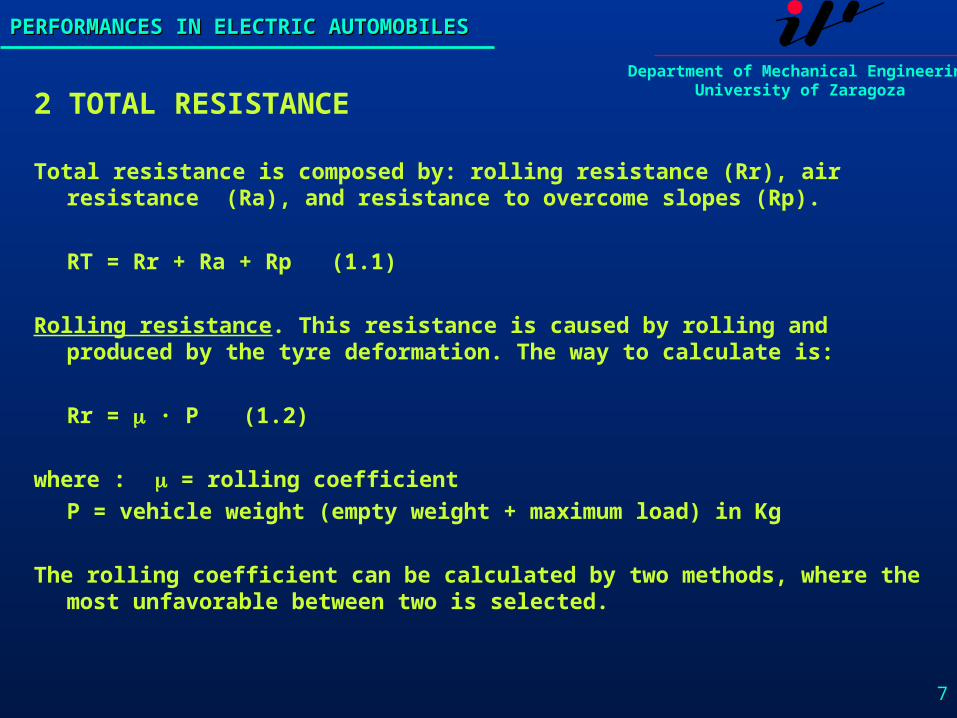
2 TOTAL RESISTANCE
Total resistance is composed by: rolling resistance (Rr), air resistance (Ra), and resistance to overcome slopes (Rp).
RT = Rr + Ra + Rp (1.1)
Rolling resistance. This resistance is caused by rolling and produced by the tyre deformation. The way to calculate is:
Rr = · P (1.2)
where : = rolling coefficient
P = vehicle weight (empty weight + maximum load) in Kg
The rolling coefficient can be calculated by two methods, where the most unfavorable between two is selected.
8
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
Department of Mechanical EngineeringUniversity of Zaragoza
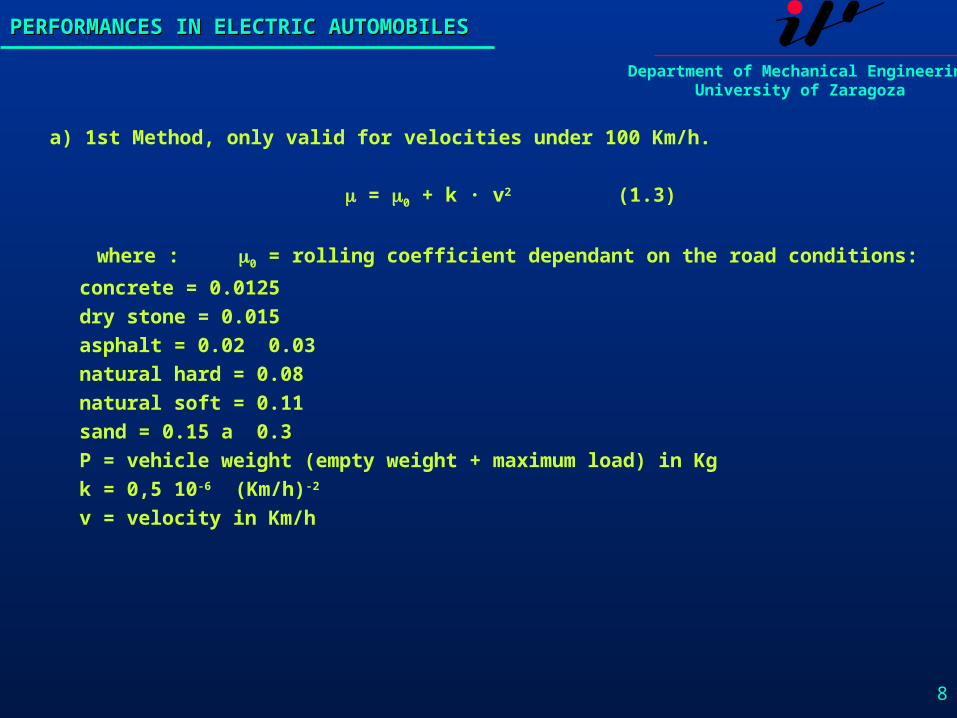
a) 1st Method, only valid for velocities under 100 Km/h.
= 0 + k · v2 (1.3)
where : 0 = rolling coefficient dependant on the road conditions:
concrete = 0.0125
dry stone = 0.015
asphalt = 0.02 0.03
natural hard = 0.08
natural soft = 0.11
sand = 0.15 a 0.3
P = vehicle weight (empty weight + maximum load) in Kg
k = 0,5 10-6 (Km/h)-2
v = velocity in Km/h

9
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
Department of Mechanical EngineeringUniversity of Zaragoza
b) 2nd Method. By using the formula given by SAE.
(1.4)
where : k1 = coefficient dependant on the tyre type
= 0.8 for radial tyres
= 1.0 for diagonal tyres
PR = weight by wheel (tons)
pn = pressure of the tyres in atmospheres (Kg/cm2)
v = speed in Km/h
k P
p
P
p
vR
n
R
n
12
10051
55 9 8 5 3
100.
. .

10
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
Department of Mechanical EngineeringUniversity of Zaragoza
Air resistance. This resistance is caused by the friction with the air and produced at high velocities. The way to calculate is :
Ra = (1.5)
where : Cx = aerodynamic penetration coefficient (0.3 to 0.4)
S = frontal surface of the vehicle (m2)
v = speed in m/s
When the calculation of the frontal surface is difficult to obtain it can be estimated by means the following approximation:
S = 0.85 · a · b (1.6)
Definition of the frontal surface.
1
162 C S vx
11
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
Department of Mechanical EngineeringUniversity of Zaragoza
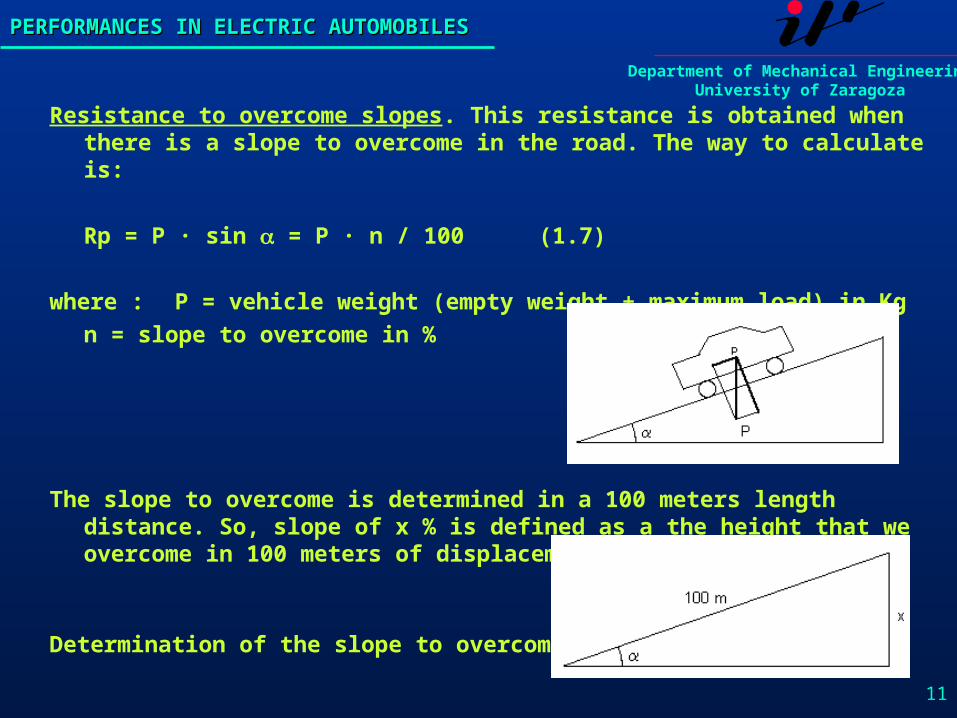
Resistance to overcome slopes. This resistance is obtained when there is a slope to overcome in the road. The way to calculate is:
Rp = P · sin = P · n / 100 (1.7)
where : P = vehicle weight (empty weight + maximum load) in Kg
n = slope to overcome in %
The slope to overcome is determined in a 100 meters length distance. So, slope of x % is defined as a the height that we overcome in 100 meters of displacement.
Determination of the slope to overcome
12
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
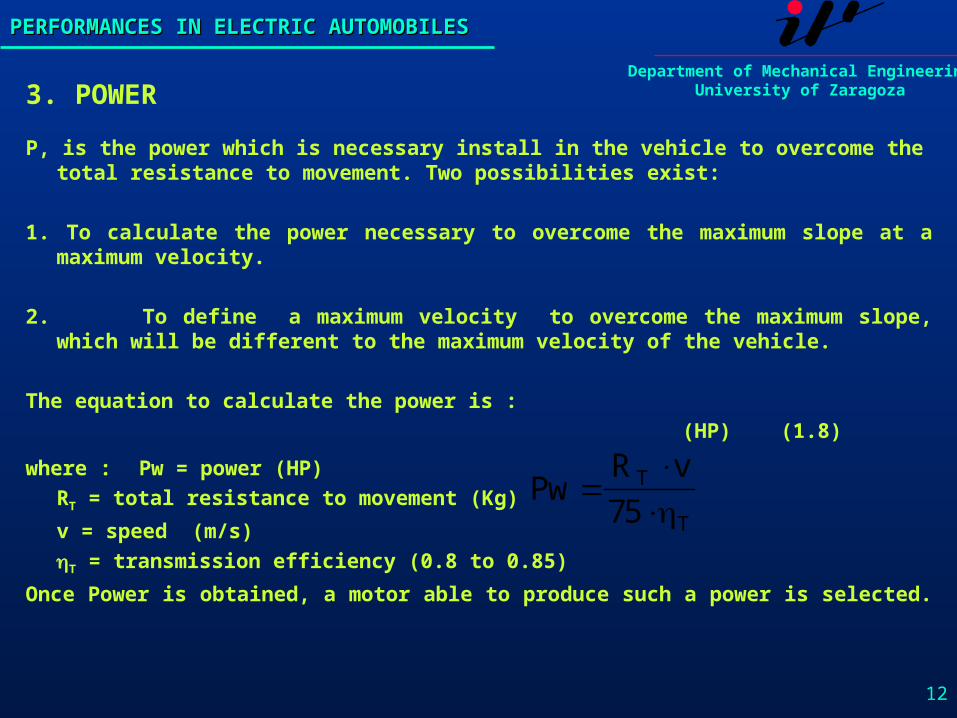
Department of Mechanical EngineeringUniversity of Zaragoza3. POWER
P, is the power which is necessary install in the vehicle to overcome the total resistance to movement. Two possibilities exist:
1. To calculate the power necessary to overcome the maximum slope at a maximum velocity.
2. To define a maximum velocity to overcome the maximum slope, which will be different to the maximum velocity of the vehicle.
The equation to calculate the power is :
(HP) (1.8)
where : Pw = power (HP)
RT = total resistance to movement (Kg)
v = speed (m/s)
T = transmission efficiency (0.8 to 0.85)
Once Power is obtained, a motor able to produce such a power is selected.
PwR vT
T
75
13
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
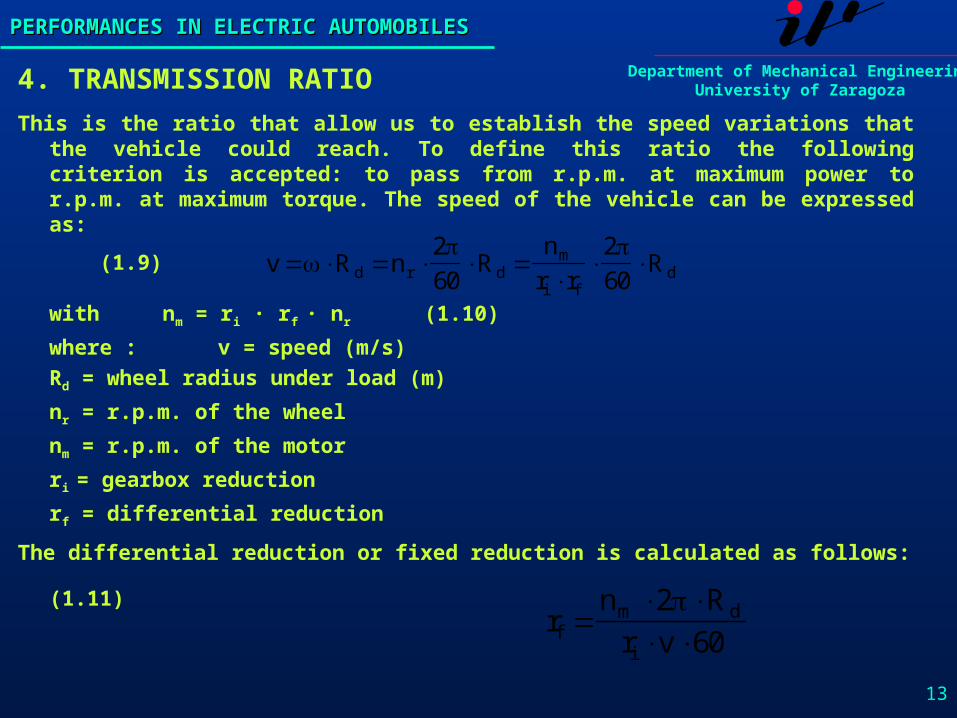
Department of Mechanical EngineeringUniversity of Zaragoza4. TRANSMISSION RATIO
This is the ratio that allow us to establish the speed variations that the vehicle could reach. To define this ratio the following criterion is accepted: to pass from r.p.m. at maximum power to r.p.m. at maximum torque. The speed of the vehicle can be expressed as:
(1.9)
with nm = ri · rf · nr (1.10)
where : v = speed (m/s)
Rd = wheel radius under load (m)
nr = r.p.m. of the wheel
nm = r.p.m. of the motor
ri = gearbox reduction
rf = differential reduction
The differential reduction or fixed reduction is calculated as follows:
(1.11)
v R n Rn
r rRd r d
m
i fd
2
60
2
60
rn R
r vfm d
i
2
60
14
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
Department of Mechanical EngineeringUniversity of Zaragoza
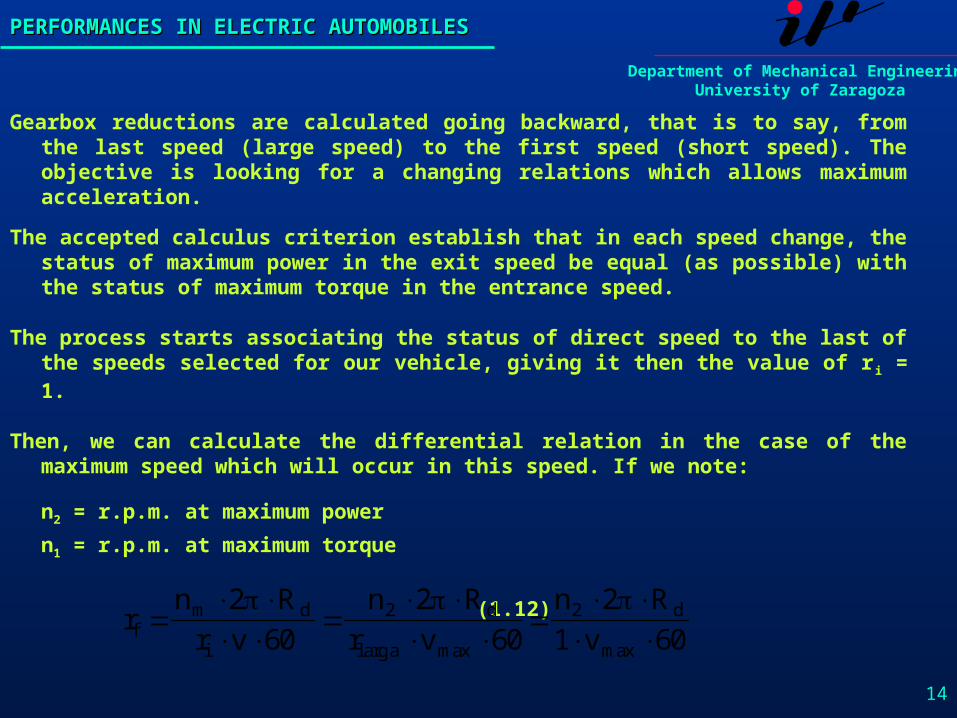
Gearbox reductions are calculated going backward, that is to say, from the last speed (large speed) to the first speed (short speed). The objective is looking for a changing relations which allows maximum acceleration.
The accepted calculus criterion establish that in each speed change, the status of maximum power in the exit speed be equal (as possible) with the status of maximum torque in the entrance speed.
The process starts associating the status of direct speed to the last of the speeds selected for our vehicle, giving it then the value of ri = 1.
Then, we can calculate the differential relation in the case of the maximum speed which will occur in this speed. If we note:
n2 = r.p.m. at maximum power
n1 = r.p.m. at maximum torque
(1.12)rn R
r v
n R
r v
n R
vfm d
i
d
l a max
d
max
2
60
2
60
2
1 602 2
arg
15
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
Department of Mechanical EngineeringUniversity of Zaragoza
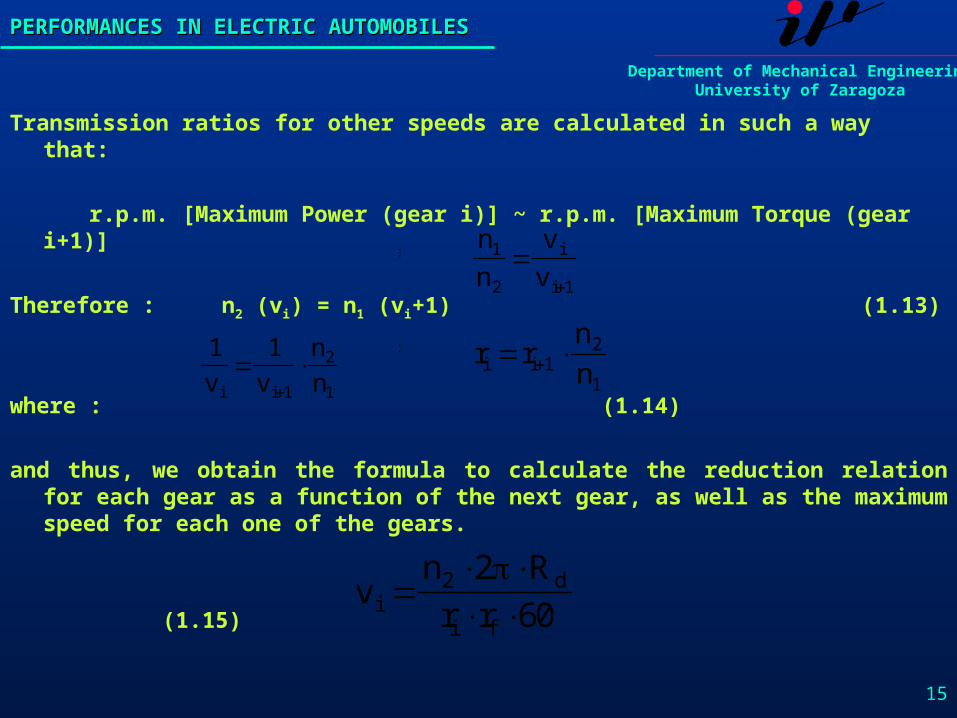
Transmission ratios for other speeds are calculated in such a way that:
r.p.m. [Maximum Power (gear i)] ~ r.p.m. [Maximum Torque (gear i+1)]
Therefore : n2 (vi) = n1 (vi+1) (1.13)
where : (1.14)
and thus, we obtain the formula to calculate the reduction relation for each gear as a function of the next gear, as well as the maximum speed for each one of the gears.
(1.15)
n
n
v
vi
i
1
2 1
vn R
r rid
i f
2 2
60
1 1
1
2
1v v
n
ni i
r rn
ni i 12
1
16
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
Department of Mechanical EngineeringUniversity of Zaragoza
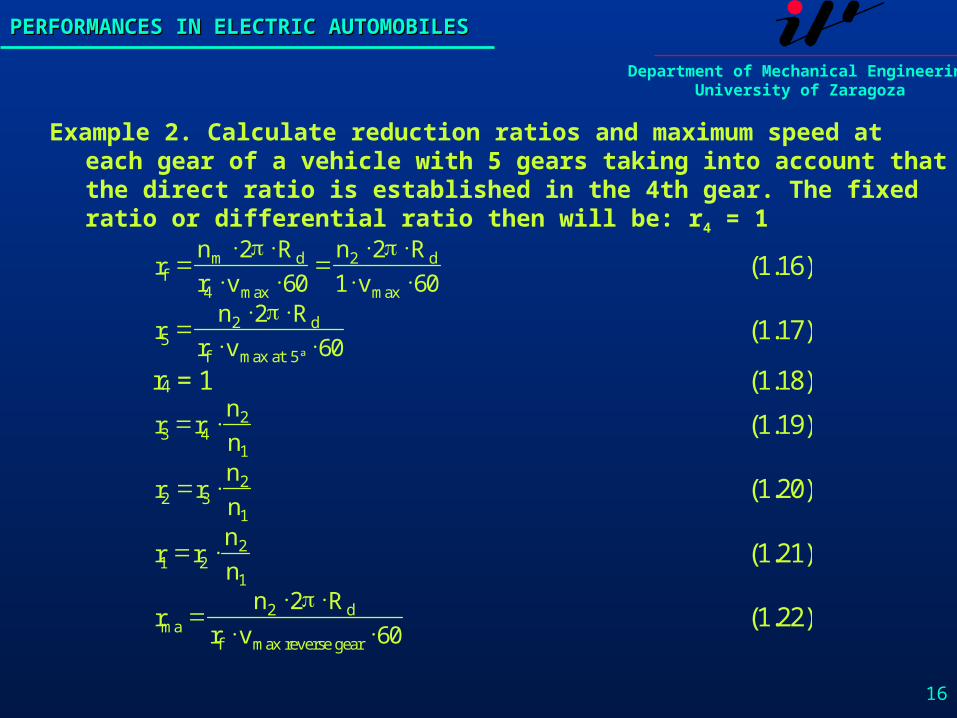
Example 2. Calculate reduction ratios and maximum speed at each gear of a vehicle with 5 gears taking into account that the direct ratio is established in the 4th gear. The fixed ratio or differential ratio then will be: r4 = 1
rn R
r v
n R
vfm d
max
d
max
2
60
2
1 604
2 (1.16)
rn R
r vd
f max at 5
2
5
2
60
ª
(1.17)
r4 = 1 (1.18)
r rn
n3 42
1
(1.19)
r rn
n2 32
1
(1.20)
r rn
n1 22
1
(1.21)
rn R
r vmad
f max reverse gear
2 2
60
(1.22)
17
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
Department of Mechanical EngineeringUniversity of Zaragoza
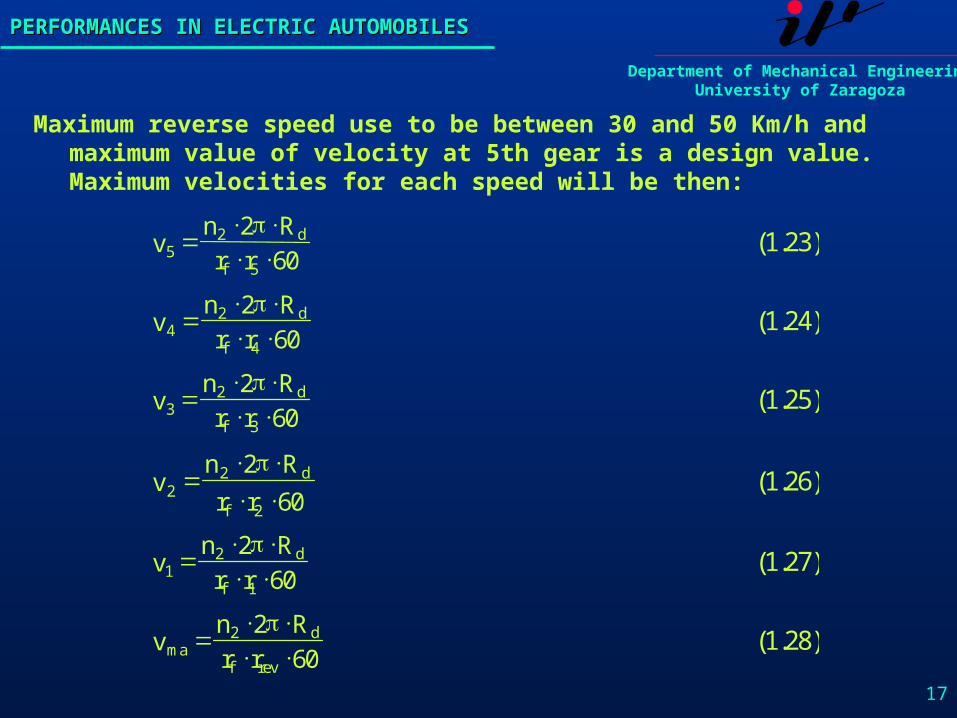
Maximum reverse speed use to be between 30 and 50 Km/h and maximum value of velocity at 5th gear is a design value. Maximum velocities for each speed will be then:
vn Rr r
d
f5
2
5
260
(1.23)
vn Rr r
d
f4
2
4
260
(1.24)
vn Rr r
d
f3
2
3
260
(1.25)
vn R
r rd
f2
2
2
2
60
(1.26)
vn Rr r
d
f1
2
1
260
(1.27)
vn Rr rma
d
f rev
2 260
(1.28)
18
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
Department of Mechanical EngineeringUniversity of Zaragoza5. CHARACTERISTICS CURVES
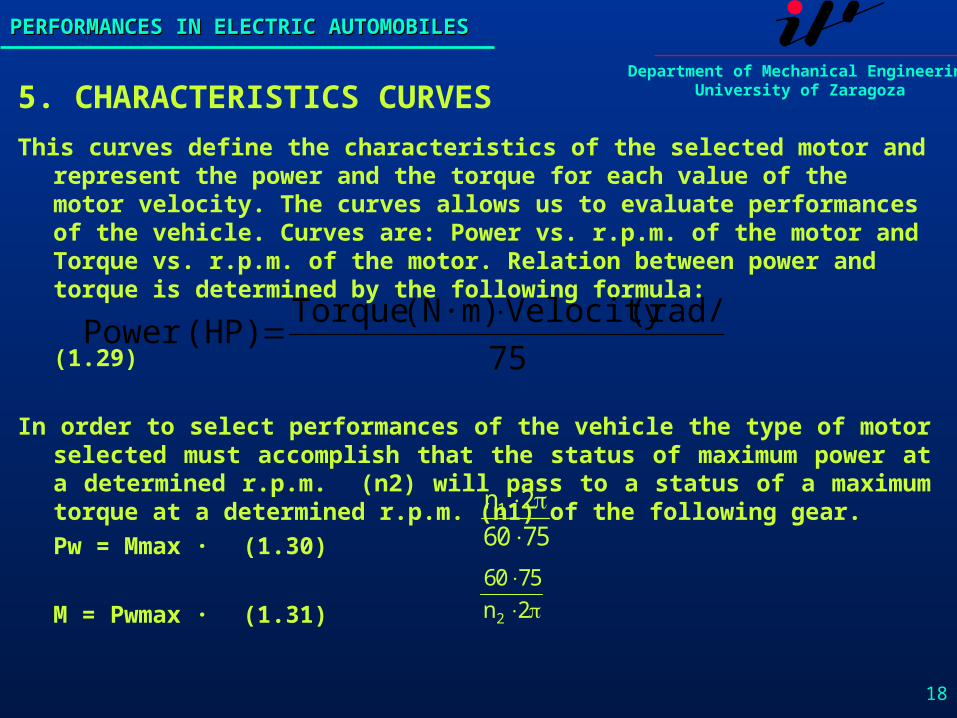
This curves define the characteristics of the selected motor and represent the power and the torque for each value of the motor velocity. The curves allows us to evaluate performances of the vehicle. Curves are: Power vs. r.p.m. of the motor and Torque vs. r.p.m. of the motor. Relation between power and torque is determined by the following formula:
(1.29)
In order to select performances of the vehicle the type of motor selected must accomplish that the status of maximum power at a determined r.p.m. (n2) will pass to a status of a maximum torque at a determined r.p.m. (n1) of the following gear.
Pw = Mmax · (1.30)
M = Pwmax · (1.31)
n1 2
60 75
60 75
22
n
75
(rad/s)Velocity (N·m) Torque(HP) Power
19
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
Department of Mechanical EngineeringUniversity of Zaragoza
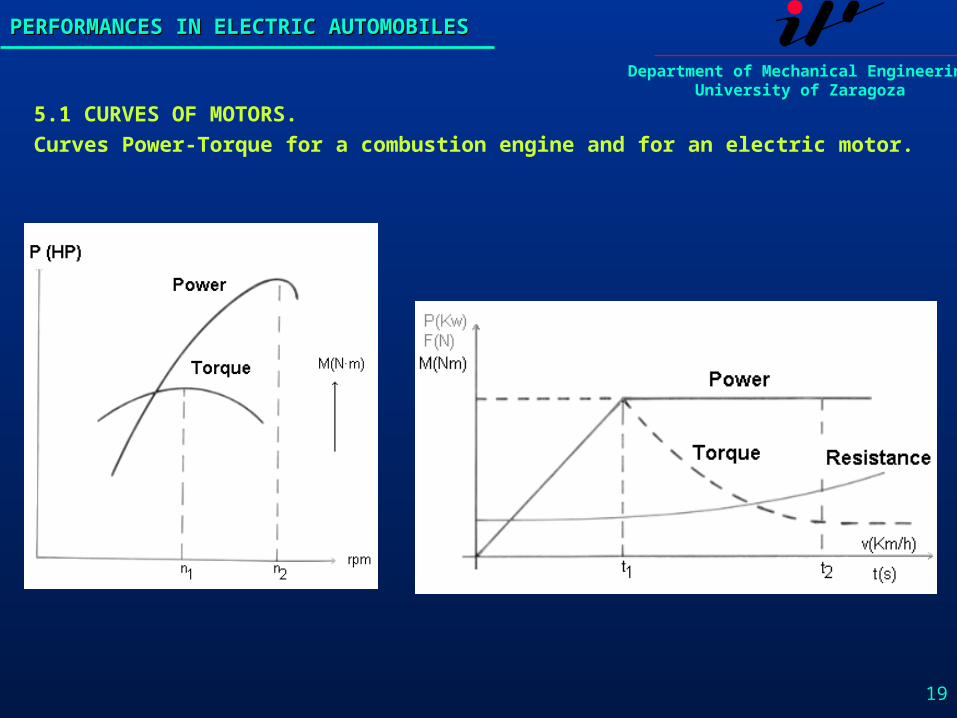
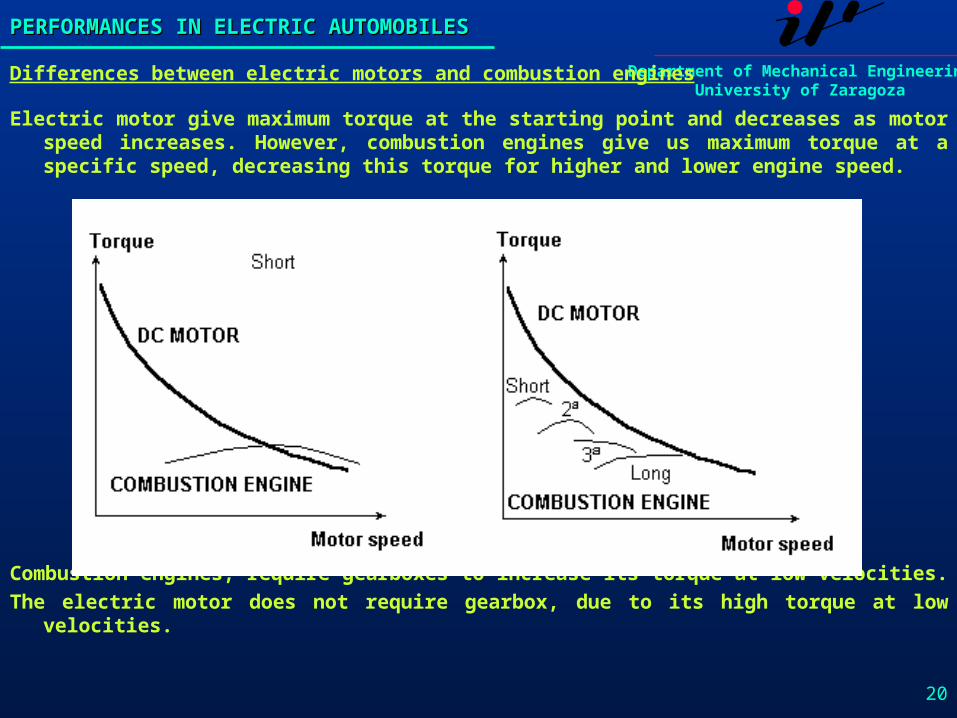
5.1 CURVES OF MOTORS.
Curves Power-Torque for a combustion engine and for an electric motor.
20
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
Department of Mechanical EngineeringUniversity of Zaragoza
Differences between electric motors and combustion engines
Electric motor give maximum torque at the starting point and decreases as motor speed increases. However, combustion engines give us maximum torque at a specific speed, decreasing this torque for higher and lower engine speed.
Combustion engines, require gearboxes to increase its torque at low velocities.
The electric motor does not require gearbox, due to its high torque at low velocities.

21
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
Department of Mechanical EngineeringUniversity of ZaragozaThe intensity required for the electric motor is proportional to the torque given (DC
motor). If the mechanical resistance is high, the electric motor demands more intensity to the energy system (battery, generator, ...), increasing the electricity consumption.
For this reason, in order to obtain better efficiency of the system, mechanical gearboxes are introduced in electric vehicles to reduce the intensity needed at low velocities.

22
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
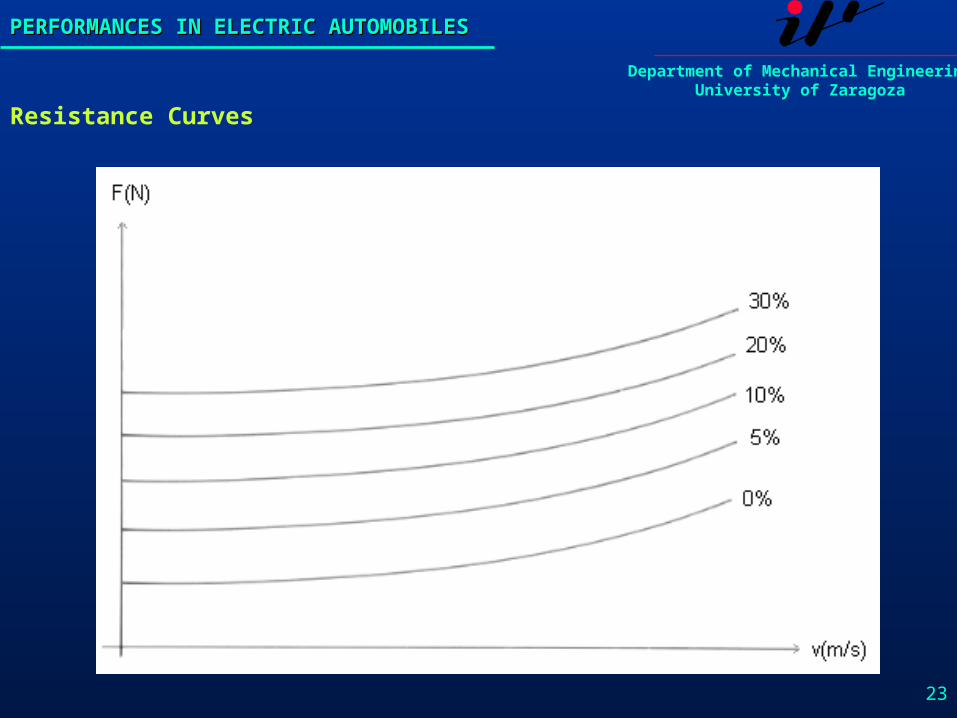
Department of Mechanical EngineeringUniversity of Zaragoza5.2 RESISTANCE CURVES
This curves define the resistance of vehicle movement and usually depends on vehicle velocity and slope to overcome.
The curves, for a given weight, can be calculated with the following equation:
RT = K1 + K2 v2 + K3 n (1.32)
where : K1 = Constant function of rolling resistance
K2 = Constant function of air resistance
K3 = Constant function of slopes to overcome
v = vehicle speed in m/s
n = slope to overcome in %
the definition of each one of this constants is as follow:
K1 = · P (1.33)
K2 = (1.34)
K3 = P/100 (1.35)
where : = rolling coefficient
P = vehicle weight (Kg)
Cx = aerodynamic penetration coefficient
S = vehicle frontal surface (m2)
1
16 C Sx
23
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
Department of Mechanical EngineeringUniversity of Zaragoza
Resistance Curves
24
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
Department of Mechanical EngineeringUniversity of Zaragoza
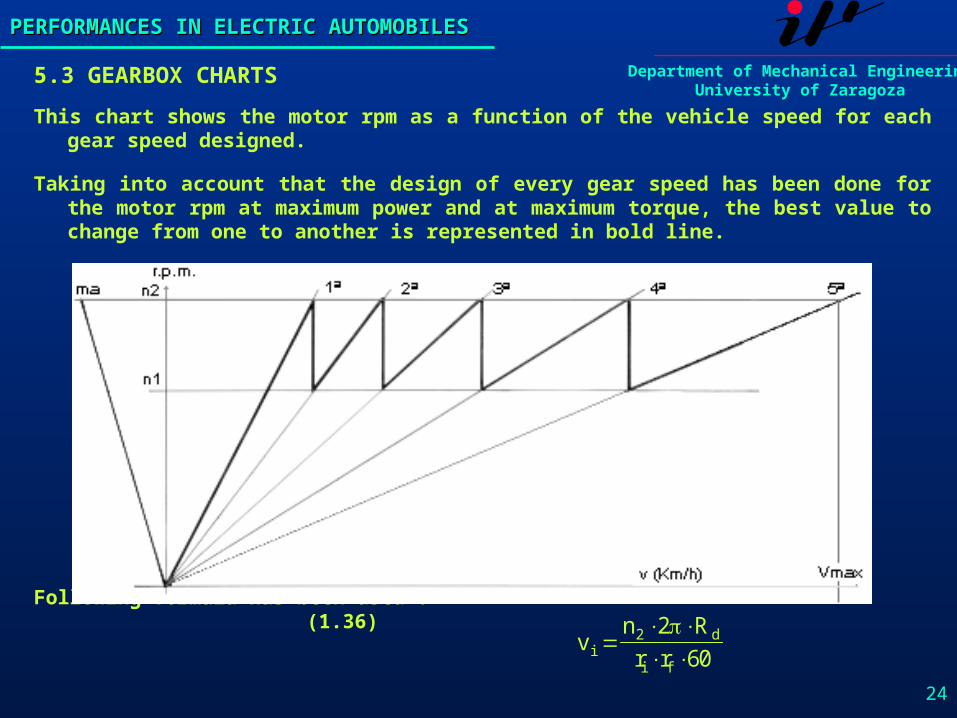
5.3 GEARBOX CHARTS
This chart shows the motor rpm as a function of the vehicle speed for each gear speed designed.
Taking into account that the design of every gear speed has been done for the motor rpm at maximum power and at maximum torque, the best value to change from one to another is represented in bold line.
Following formula has been used : (1.36)vn R
r rid
i f
2 2
60
25
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
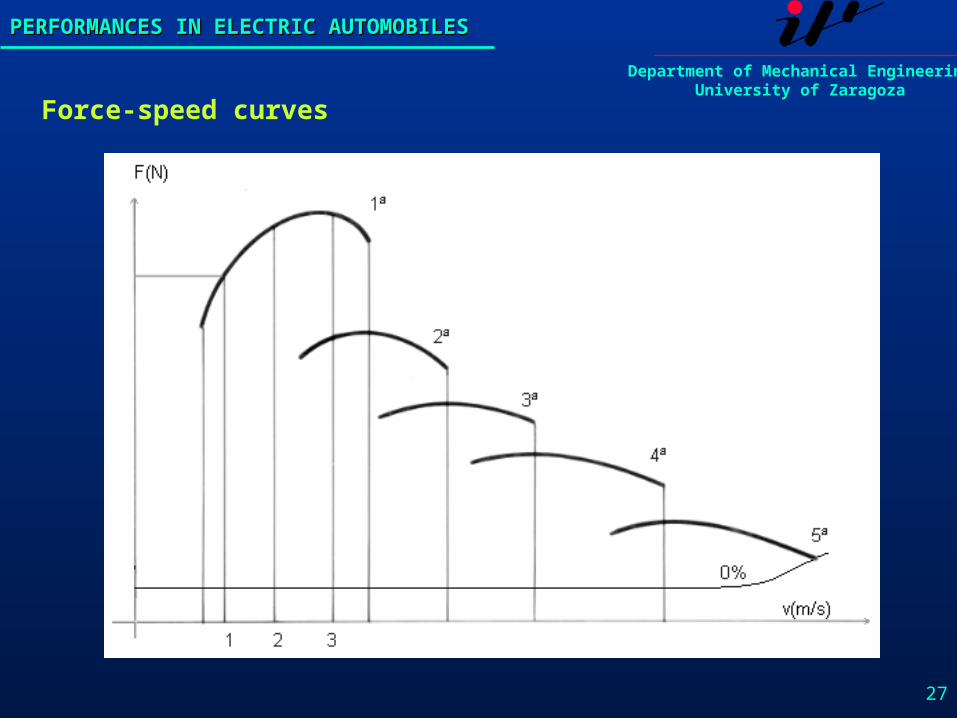
Department of Mechanical EngineeringUniversity of Zaragoza5.4 FORCE-SPEED CURVE
Next step is to obtain the necessary force in the wheel as a function of the linear vehicle speed.
The equation needed is:
Mr = Mm · ri · rf · T = F · Rd (1.37)
where : Mr = wheel torque (Nm)
Mm = motor torque (Nm)
F = wheel force (N)
T = transmission efficiency
ri = differential reduction ratio
rf = gearbox reduction ratio
Rd = wheel radius (m)
26
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
Department of Mechanical EngineeringUniversity of Zaragoza
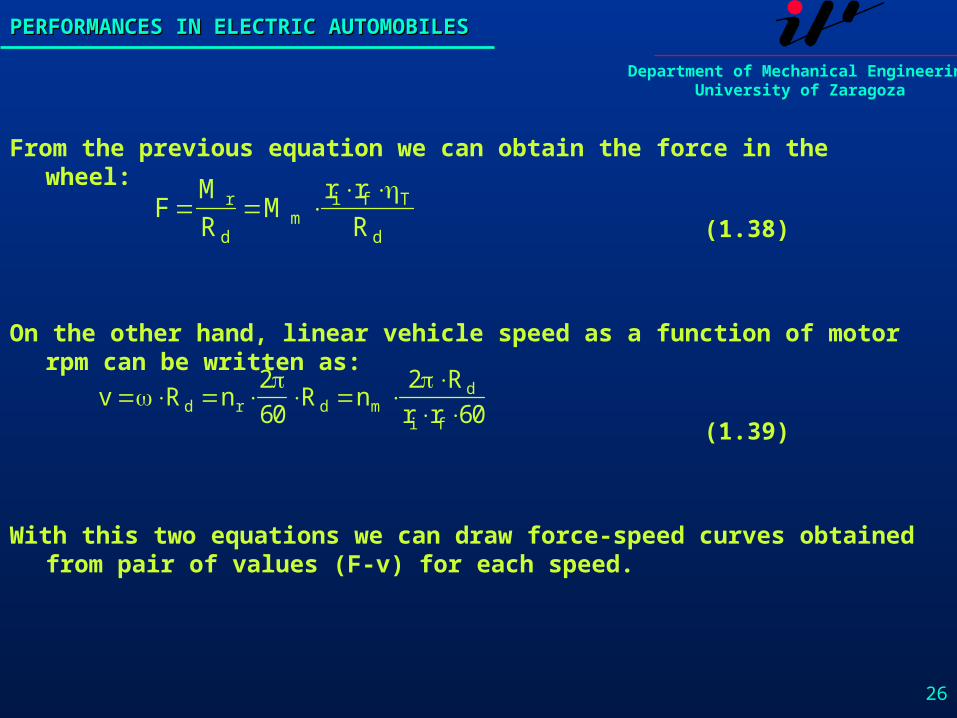
From the previous equation we can obtain the force in the wheel:
(1.38)
On the other hand, linear vehicle speed as a function of motor rpm can be written as:
(1.39)
With this two equations we can draw force-speed curves obtained from pair of values (F-v) for each speed.
v R n R nR
r rd r d md
i f
2
60
2
60
FM
RM
r r
Rr
dm
i f T
d
27
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
Department of Mechanical EngineeringUniversity of Zaragoza
Force-speed curves
28
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
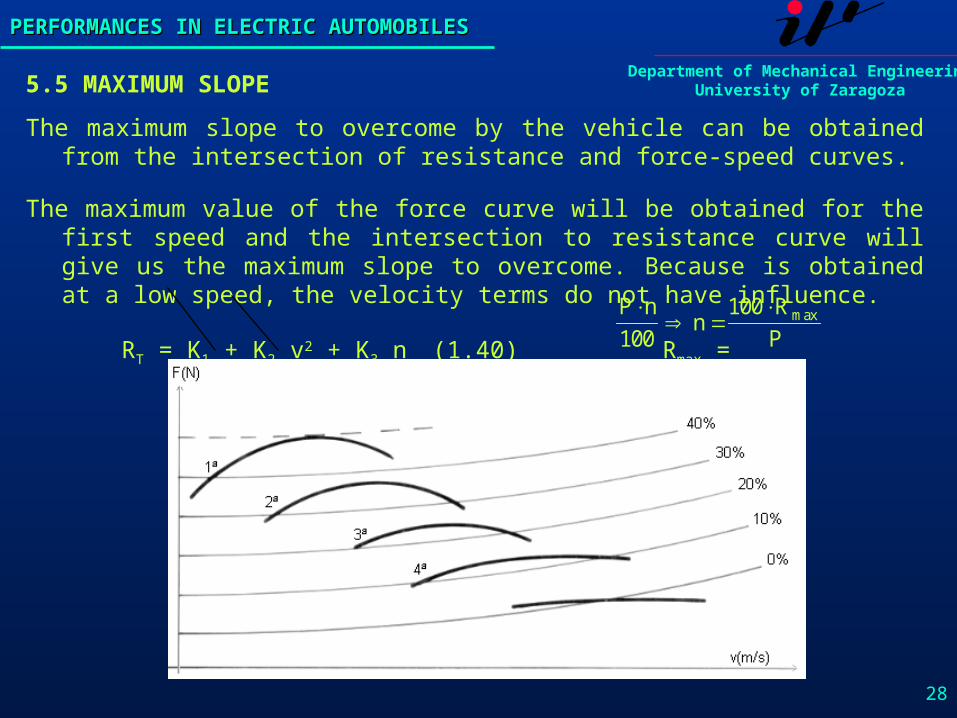
Department of Mechanical EngineeringUniversity of Zaragoza5.5 MAXIMUM SLOPE
The maximum slope to overcome by the vehicle can be obtained from the intersection of resistance and force-speed curves.
The maximum value of the force curve will be obtained for the first speed and the intersection to resistance curve will give us the maximum slope to overcome. Because is obtained at a low speed, the velocity terms do not have influence.
RT = K1 + K2 v2 + K3 n (1.40) Rmax = (1.41)
P nn
R
Pmax
100
100
29
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
Department of Mechanical EngineeringUniversity of Zaragoza5.6. ACCELERATION
One of the most important features to evaluate performances in vehicles is to study the acceleration capability.
The acceleration capability () depends on the difference between force generated and resistance obtained and vehicle mass as well.
To carry on this study on acceleration, is required to define an equivalent mass (me) which corresponds to the vehicle mass plus the inertia of rotator parts.
In order to take into account the inertia of those rotator parts, this contribution use to estimated as a 1% of the total mass of the vehicle (P).
me = P + 0.01 P = 1.01 P (1.42)
30
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
Department of Mechanical EngineeringUniversity of Zaragoza
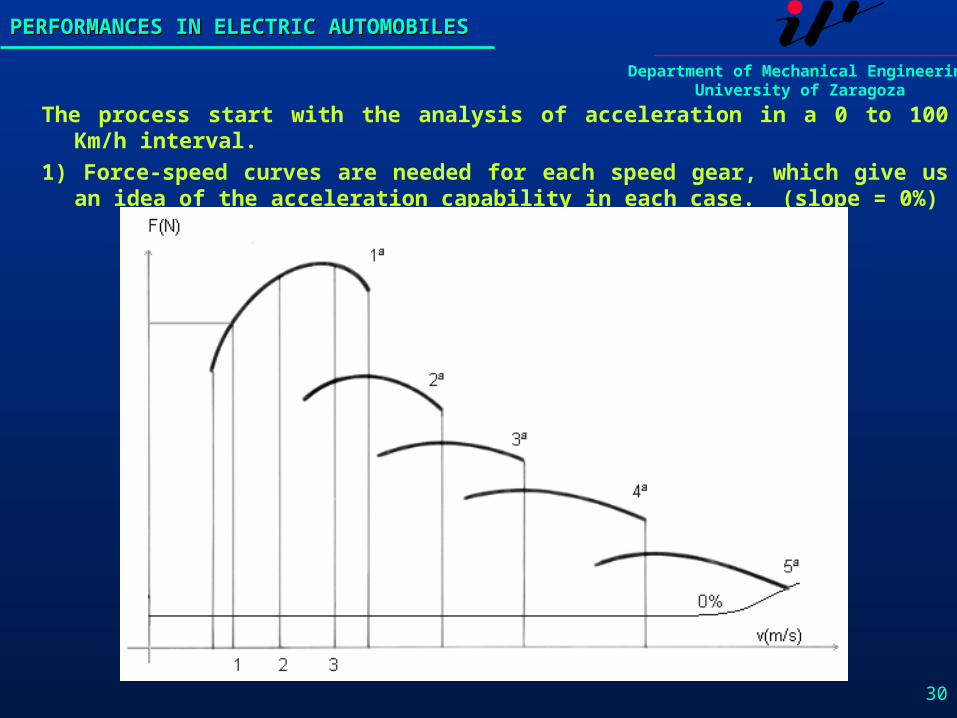
The process start with the analysis of acceleration in a 0 to 100 Km/h interval.
1) Force-speed curves are needed for each speed gear, which give us an idea of the acceleration capability in each case. (slope = 0%)
31
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
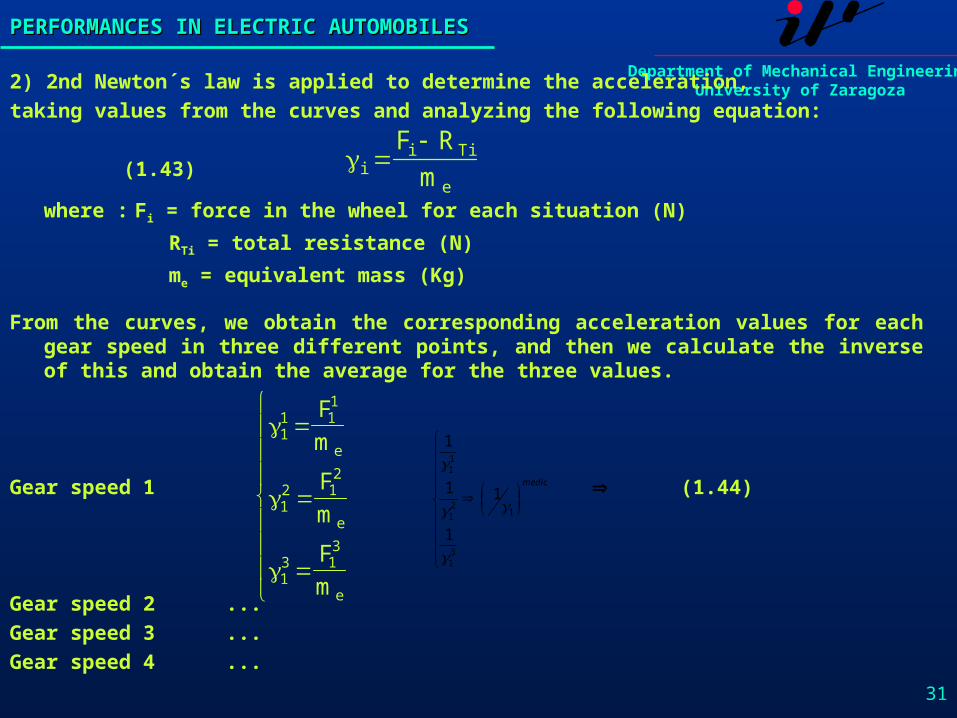
Department of Mechanical EngineeringUniversity of Zaragoza2) 2nd Newton´s law is applied to determine the acceleration,
taking values from the curves and analyzing the following equation:
(1.43)
where : Fi = force in the wheel for each situation (N)
RTi = total resistance (N)
me = equivalent mass (Kg)
From the curves, we obtain the corresponding acceleration values for each gear speed in three different points, and then we calculate the inverse of this and obtain the average for the three values.
Gear speed 1 (1.44)
Gear speed 2 ...
Gear speed 3 ...
Gear speed 4 ...
ii Ti
e
F R
m
11 1
1
12 1
2
13 1
3
F
m
F
m
F
m
e
e
e
medio
1
31
21
11
1
1
1
1
32
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
Department of Mechanical EngineeringUniversity of Zaragoza
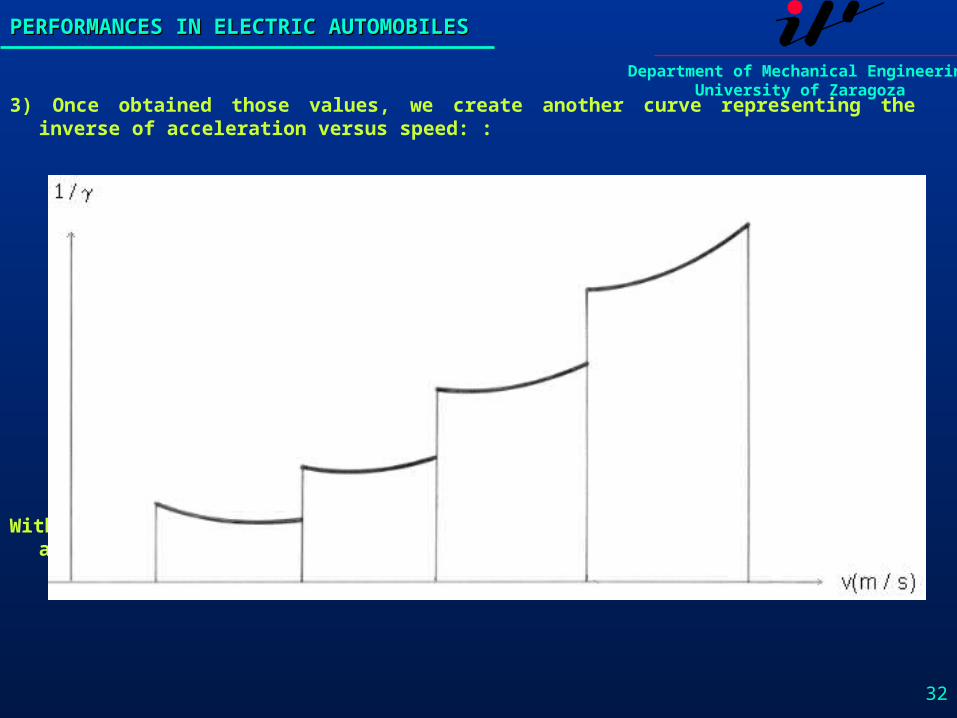
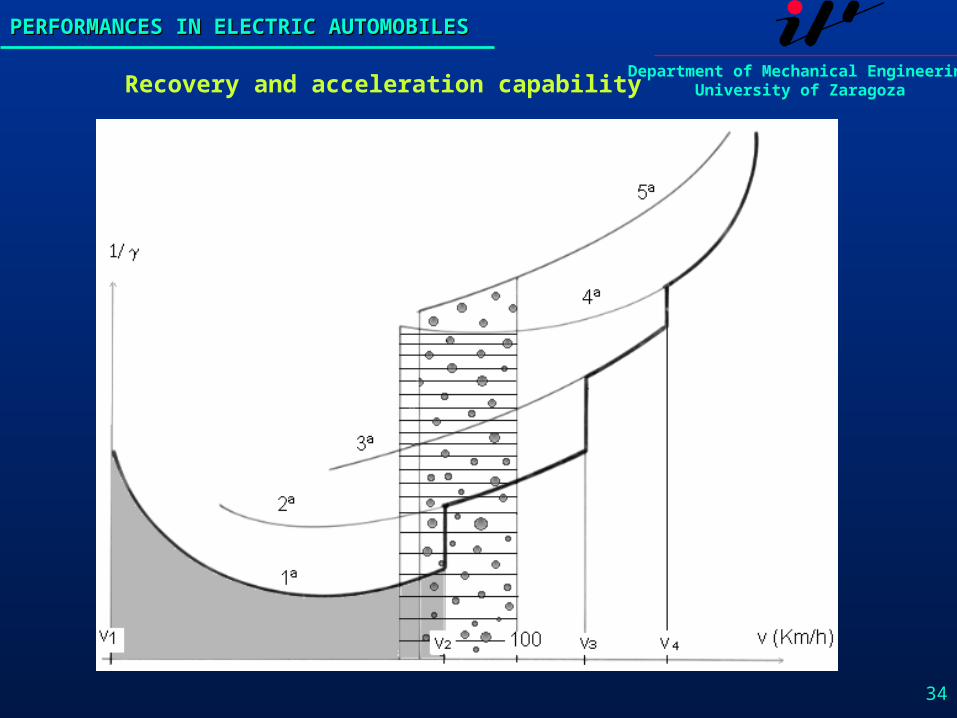
3) Once obtained those values, we create another curve representing the inverse of acceleration versus speed: :
With this type of curve is more clear to analyze performances in vehicles as acceleration capability and recovery capability, measured in terms of time.
33
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
Department of Mechanical EngineeringUniversity of Zaragoza
Then, it is possible to calculate time needed to accelerate from 0 to 100 Km/h or time needed to reach a determined speed from other speed different from 0, only obtaining the area under the curve, limited by the speed values that we select, by means numerical integration. The justification comes from the following formula:
(1.45)
t vavb = (1.46)
Following figure shows three examples: 1) acceleration time from 0 to100 Km/h 2) recovery time from 60 Km/h to 100 Km/h at 5th speed, 3) recovery time from 40 Km/h to 100 Km/h at 4th speed.
(1.47)
dv
dtdt dv dt dv
va
vb
va
vb1 1
1
va
vb dv
t 0 27 77 1111 27 77 16 66 27 77
1 1 1 . . . . . 0
27.77
11.11
27.77
16.66
27.77 dv; t dv; t dv
34
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
Department of Mechanical EngineeringUniversity of ZaragozaRecovery and acceleration capability
35
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
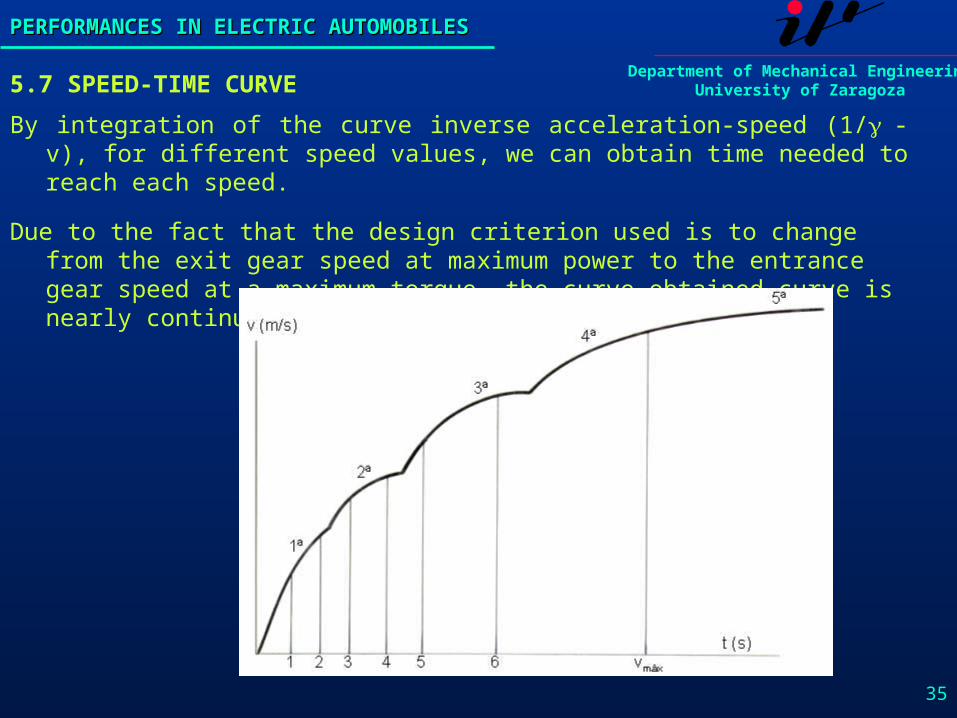
Department of Mechanical EngineeringUniversity of Zaragoza5.7 SPEED-TIME CURVE
By integration of the curve inverse acceleration-speed (1/- v), for different speed values, we can obtain time needed to reach each speed.
Due to the fact that the design criterion used is to change from the exit gear speed at maximum power to the entrance gear speed at a maximum torque, the curve obtained curve is nearly continue as can be seen in the following figure:
36
PERFORMANCES IN ELECTRIC AUTOMOBILESPERFORMANCES IN ELECTRIC AUTOMOBILES
Department of Mechanical EngineeringUniversity of Zaragoza Supposing that change from one gear speed to another
it takes 1 or 2 seconds, we can obtain time needed to get a determined speed. That is:
(1.48)
Using previous chart, we can calculate time needed to reach each one of the velocities
speed 1 va ta (1/1) average t vbva = (vb - va) · (1/1) average
vb tb
speed 2 vc tc (1/2) average t vdvc = (vd - vc) · (1/2) average
vd td
speed 3 ve te (1/3)average t vfve = (vf - ve) · (1/3) average
vf tf
speed 4 vg tg (1/4)average t vhvg = (vh - vg) · (1/4) average
vh th
If we wanted to calculate time needed to reach maximum velocity at a 4th gear speed, we operate as follows:
t 0100 = (vmax - vg) · (1/4)average + tg (1.49)
t v v vi
media
final iniciali
media
1 1