performance characteristics of a pseudo-operational ensemble kalman filter april 2006, enkf...
Post on 20-Dec-2015
213 views
TRANSCRIPT

Performance Characteristics of a Pseudo-operational Ensemble Kalman Filter
April 2006, EnKF Wildflower Meeting
Greg Hakim & Ryan TornUniversity of Washington
http://www.atmos.washington.edu/~hakim

Outline
• Issues for limited-area EnKFs.– Boundary conditions.
– Nesting.
– [Multiscale prior covariance.]
• UW pseudo-operational system.– Performance characteristics.
– Analysis of Record (AOR) test.
• Experiments using the UW RT data.– Sensitivity & targeting.
– Observation impact & thinning.

Boundary Conditions
• Obvious choice: global ensemble, but…– Often ensembles too small.– Undesirable ensemble population techniques.– Different resolution, grids, etc.
• Flexible alternatives (Torn et al. 2006).– Mean + random draws from N(0,B).– Mean + scaled random draws from climatology.– “error boundary layer” shallow due to obs.

Nesting
• Grid 1: global ensemble BCs.– E.g. draws from N(0,B) or similar.
• Grid 2: ensemble BCs from grid 1.• One-way nesting: straightforward.
– Cycle on grid 1, then on grid 2.
• Two-way: many choices; little experience.– Note: Hxb different on grids 1 and 2. – Issues at grid boundaries.
12

The Multiscale Problem
• Sampling error– noise in obs est & prior covariance.
• Ad hoc remedies– “localization” – Confidence intervals.
• Multiscale problem.– Noise on smallest scales may dominate.– Need for scale-selective update?

Surface Temperature Covariance

Mesoscale Example: cov(|V|, qrain)

Real Time Data Assimilation at the University of Washington
Objectives of System
• Evaluate EnKF in a region of sparse in-situ observations and complex topography.
• Estimate analysis & forecast error.
• Sensitivity: targeting & thinning.

Model Specifics
• WRF Model, 45 km resolution, 33 vertical levels
• 90 ensemble members
• 6 hour analysis cycle
• ensemble forecasts to t+24 hrs at 00 and 12 UTC
• perturbed boundaries using fixed covariance perturbations from WRF 3D-VAR

Observations
Obs. Type Variables 00 UTC 06 UTC 12 UTC 18 UTC
Surface Altimeter 430 420 420 440
Rawindsonde u, v, T, RH 1000 0 1000 0
ACARS u, v, T 1650 1390 740 1860
Cloud Wind u, v 2030 1740 1670 1510
Total 5110 3550 3830 3810

Probabilistic Analyses
Large uncertainty associated with shortwave approaching in NW flow
sea-level pressure500 hPa height

Microphysical Analyses
model analysis composite radar
20 February 2005, 00 UTC

Ensemble ForecastsAnalysis 24-hour forecast
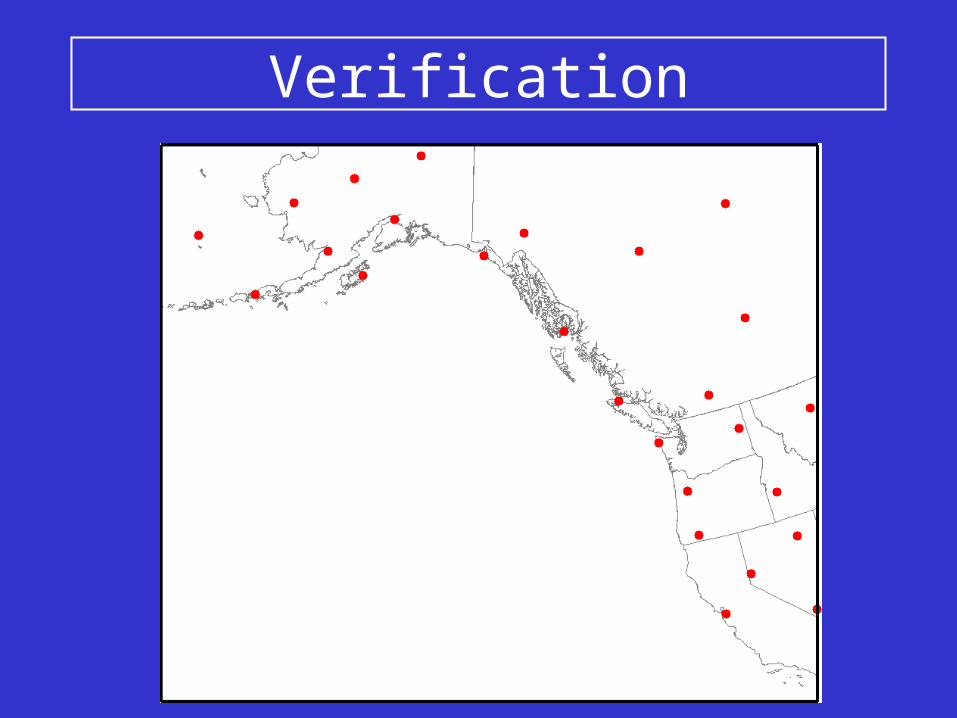
Verification

Temperature Verification12 hour forecast 24 hour forecast
UW EnKF GFS CMC UKMO NOGAPS ECMWF

U-Wind Verification12 hour forecast 24 hour forecast
UW EnKF GFS CMC UKMO NOGAPS ECMWF

Moisture Verification (Td)12 hour forecast 24 hour forecast
UW EnKF GFS CMC UKMO NOGAPS ECMWF

No Assimilation Verification
UW EnKF No Observations Assimilated
Winds Temperature

Moving Toward the Mesoscale

Analysis of Record
Hourly surface analyses.EnKF covariances.Available t+30 minutes.15 km resolution.

Sensitivity Analysis
• Basic premise: – how do forecasts respond to changes in initial
& boundary conditions, & the model?
• Applications:– “targeted observations” & network design.– “targeted state estimation” (thinning).– basic dynamics research.

Adjoint approach
Given J, a scalar forecast metric, one can show that:
•Need to run an adjoint model backward in time.•Complex code & lots of approximations
•Does not account for state estimation or errors.
adjoint of resolvant

Ensemble Approach
• Adjoint sensitivity weighted by initial-time error covariance.
• Can evaluate rapidly without an adjoint model!
• Can show: this gives response in J, including state estimation.
With Brian Ancell (UW)

Sensitivity from the UW Real-time system
Case study removing one observation.Metric: average MSL pressure over western WA

Sensitivity Demonstration
How would a forecast change if buoy 46036 were removed?

Overview of Case
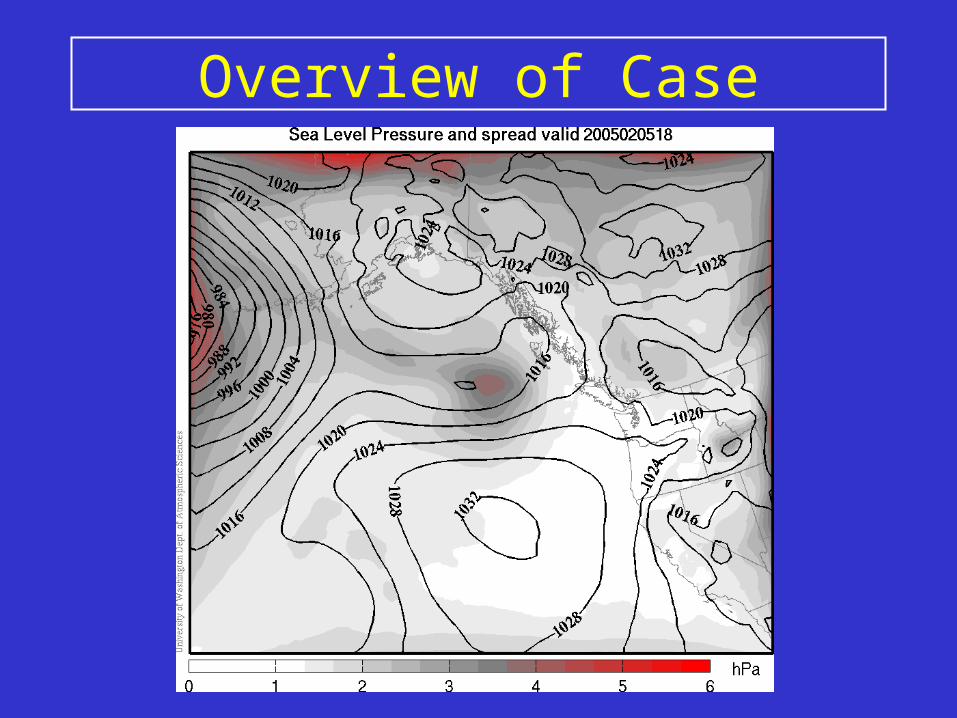
Overview of Case
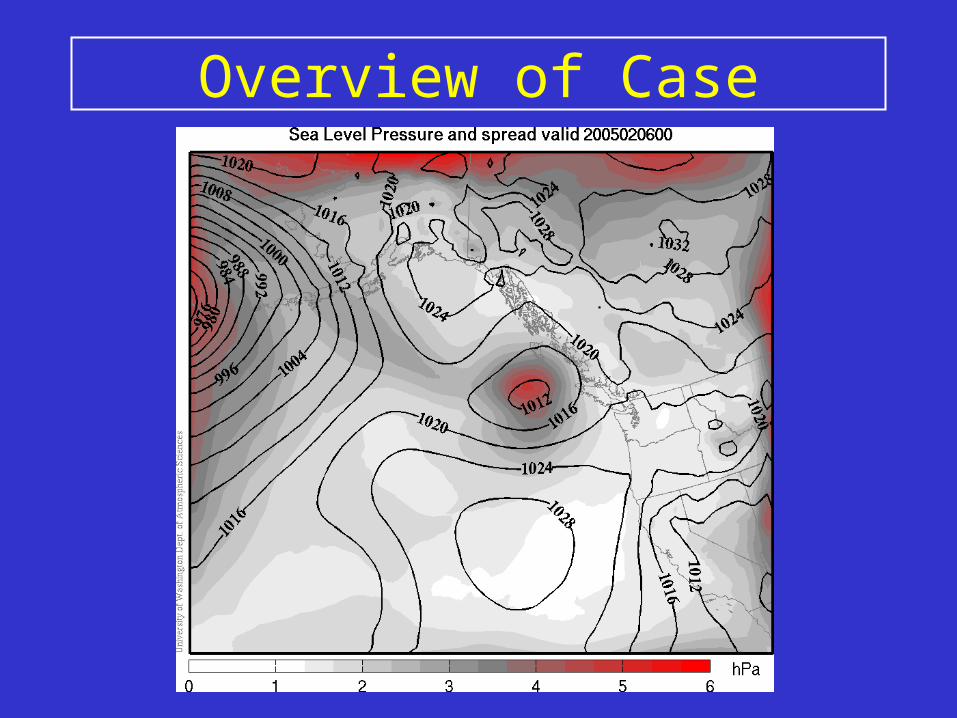
Overview of Case

Overview of Case

Overview of Case

Sea-level pressure 850 hPa temperature
12 UTC 5 Feb Sensitivity

Analysis Change Forecast Sensitivity
12 UTC 5 Feb. Analysis Change

Forecast Differences
• Assimilating the surface pressure observation at buoy 46036 leads to a stronger cyclone.
• Predicted Response: 0.63 hPa
• Actual Response: 0.60 hPa

Summary of 10 Cases
Observation Impact
Adaptively sampling the obs datastream–Thin by assimilating only high-impact obs.
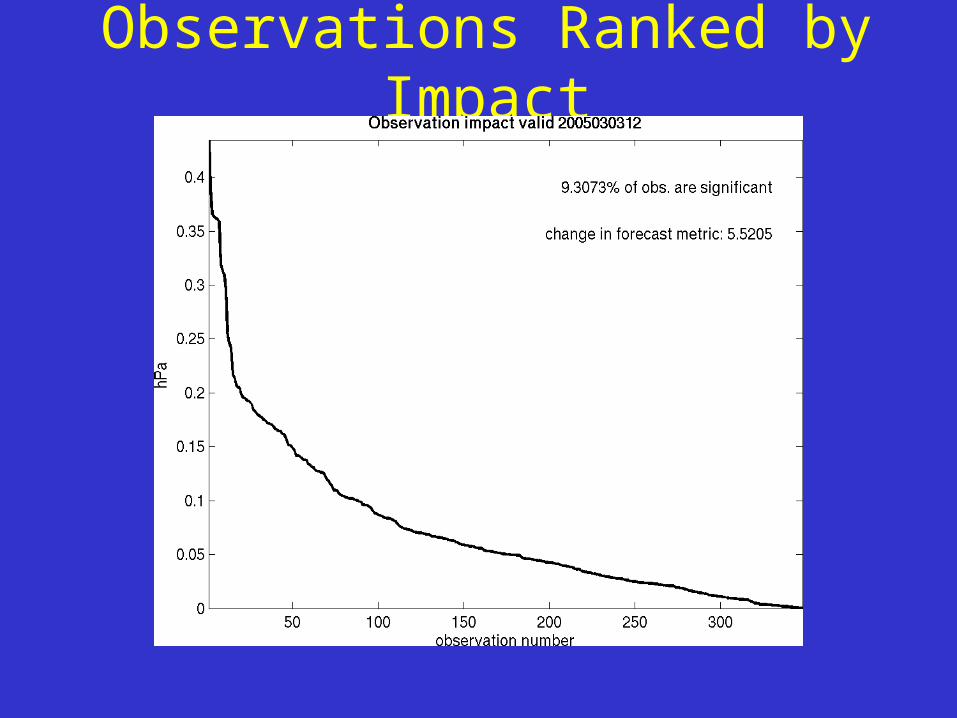
Observations Ranked by Impact

Ob-Type Contributions to Metric
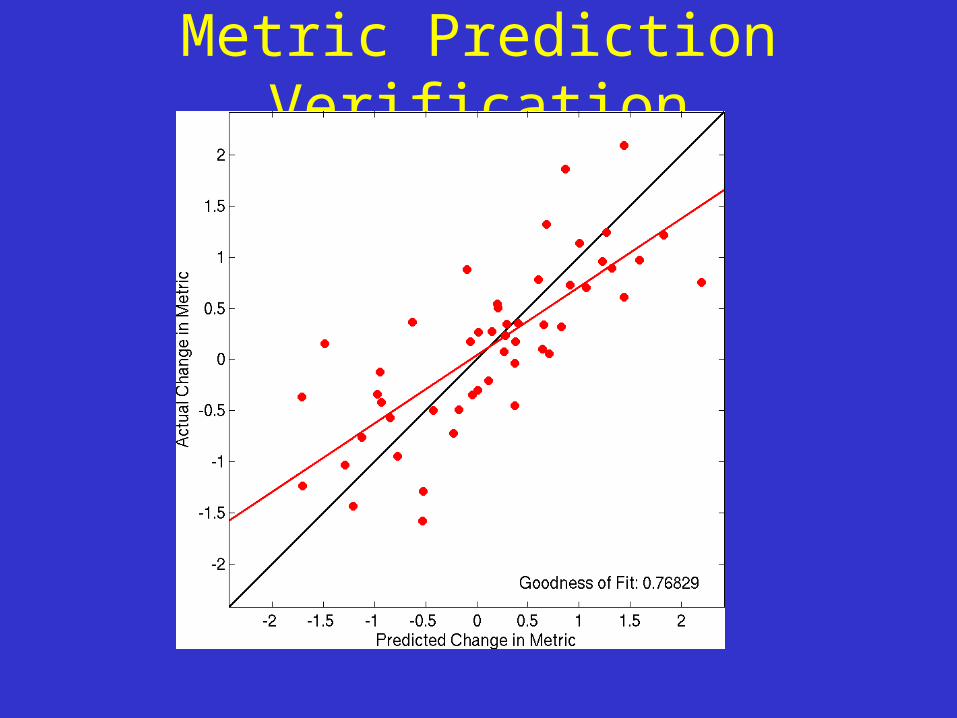
Metric Prediction Verification
Summary
• BCs: flexibility & weak influence.• UW real-time system ~gov. center quality.
– Moisture field better than most.– Surface AOR ~10 km.
• Sensitivity analysis.– Ensemble targeting easy & flexible.– Adaptive DA (“thinning”).


AOR Opportunities
• “No propagate” update– nested high resolution single member.– assimilate using coarse-grid stats.– can be done “now.”
• Deterministic propagation– as above, but evolve high-res state.
• Full filter– evolve & assimilate entire ensemble.
• 4DVAR with EnKF statistics.– at least 3--5 years out.
AOR Challenges
• True multiscale conditions (<15 km).– Scale-dependent sampling errors?
• Bias estimation and removal.– EnKF allows state-dependent bias estimation.
• Model error estimation & removal.– Parameter estimation; model calibration.
• Satellite radiance assimilation.• Kalman smoothing.
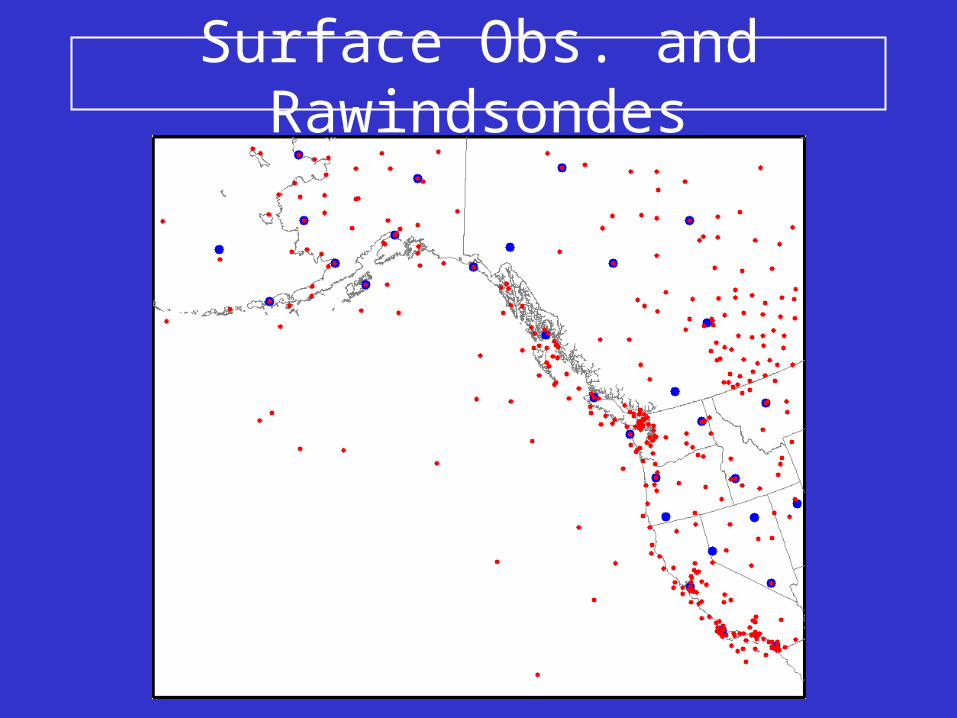
Surface Obs. and Rawindsondes

Observation Densities
aircraft obs. cloud winds
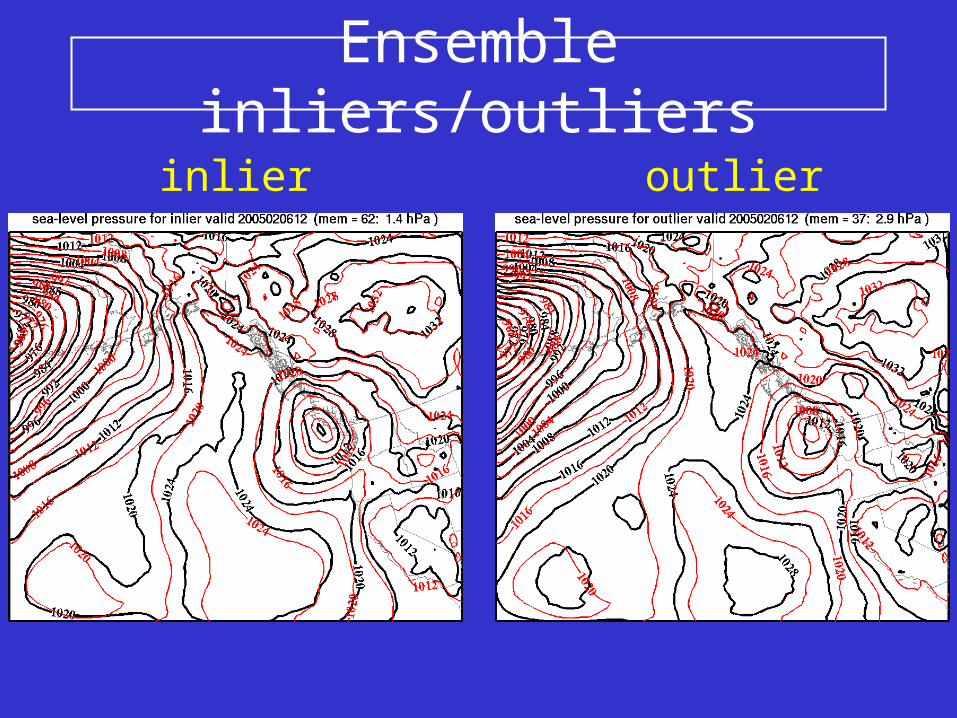
Ensemble inliers/outliers
inlier outlier