parameters tuning of power system stabilizers using improved ant direction hybrid differential...
TRANSCRIPT

Electrical Power and Energy Systems 31 (2009) 34–42
Contents lists available at ScienceDirect
Electrical Power and Energy Systems
journal homepage: www.elsevier .com/locate / i jepes
Parameters tuning of power system stabilizers using improvedant direction hybrid differential evolution
Sheng-Kuan Wang a,b,*, Ji-Pyng Chiou b, Chih-Wen Liu a
a Electrical Engineering, National Taiwan University, No. 1, Sec. 4, Roosevelt Road, Taipei 10617, Taiwan, ROCb Electrical Engineering, Ming Chi University of Technology, 84 Gungjuan Rd., Taishan, Taipei 24301, Taiwan, ROC
a r t i c l e i n f o
Article history:Received 15 February 2008Received in revised form 17 September2008Accepted 18 October 2008
Keywords:Hybrid differential evolutionPower system stabilizerDynamic stabilityOptimizationEigenvalue analysis
0142-0615/$ - see front matter � 2008 Elsevier Ltd. Adoi:10.1016/j.ijepes.2008.10.003
* Corresponding author. Address: Electrical EngineTechnology, 84 Gungjuan Rd., Taishan, Taipei 2430129089899; fax: +886 2 29084507.
E-mail address: [email protected] (S.-K. Wa
a b s t r a c t
The tuning of the PSS parameters for a multi-machine power system is usually formulated as an objectivefunction with constraints consisting of the damping factor and damping ratio. A novel mixed-integer antdirection hybrid differential evolution algorithm, called MIADHDE, is proposed to solve this kind of prob-lem. The MIADHDE is improved from ADHDE by the addition of accelerated phase and real variables. Theperformances of three different objective functions are compared to the MIADHDE in this paper. Bothlocal and remote feedback signals of machine speed deviation measurements can be selected as input sig-nals to the PSS controllers in the proposed objective function. The New England 10-unit 39-bus standardpower system, under various system configurations and loading conditions, is employed to illustrate theperformance of the proposed method with the three different objective functions. Eigenvalue analysisand nonlinear time domain simulation results demonstrate the effectiveness of the proposed algorithmand the objective function with a remote signal.
� 2008 Elsevier Ltd. All rights reserved.
1. Introduction
The dynamic stability of power systems is an important factorfor secure system operation. Low-frequency oscillation modeshave been observed when power systems are interconnected byweak tie lines [1,2]. The low-frequency oscillation mode, whichhas poor damping in a power system, is also called the electrome-chanical oscillation mode and usually occurs in the frequencyrange of 0.1–2.0 Hz [3–6]. The power system stabilizer (PSS) hasbeen widely used for mitigating the effects of low-frequency oscil-lation modes [7]. The construct and parameters of PSS have beendiscussed in many studies [3–6]. Currently, many plants prefer toemploy conventional lead-lag structure PSSs, due to the ease of on-line tuning and reliability [7–9]. Over the last two decades, variousparameter tuning schemes of PSS have been developed and appliedto solve the problem of dynamic instability in a power system. Theparameter tuning of PSSs in the power system has two majormethods, sequential tuning and simultaneous tuning [8]. In orderto obtain the set of optimal PSS parameters under various operat-ing conditions, the tuning and testing of PSS parameters must berepeated under various system operating conditions. Therefore, ifthe sequential tuning method is applied to tuning PSS parameters,
ll rights reserved.
ering, Ming Chi University of, Taiwan, ROC. Tel.: +886 2
ng).
the parameters tuning will become more complicated, and thetuned result maybe not a locally or globally optimal solution. Onthe other hand, in the case that the simultaneous tuning methodis employed in tuning of PSS parameters, which can simulta-neously relocate and coordinate the eigenvalues of various oscilla-tion modes under different operating conditions, the set of PSSparameters solutions can quite close to the globally optimal solu-tion. However, the drawback of the simultaneous tuning methodis the longer computation time required for large power systems.The simultaneous tuning of PSS parameters is usually formulatedas a very large scale nonlinear non-differentiable optimizationproblem. This kind of optimization problem is very hard, if notimpossible, to solve using traditionally differentiable optimizationalgorithms. Instead, we propose a stochastic optimizationapproach.
Abdel-Magid and Abido [8,10–13] have employed the tabusearch (TS), simulated annealing (SA), particle swarm optimization(PSO), evolutionary programming (EP), and genetic algorithm (GA)to optimize the parameters of the PSSs in the New England ten-ma-chine system. In the system, all PSSs are simultaneously designedto take into account mutual interactions. The objective functionis devised to optimize the desired damping factor (r) and/or thedesired damping ratio (n) of the lightly damped and undampedmodes. In this way, only the unstable or lightly damped oscillationmodes are relocated. Hongesombut et al. [9] used hierarchical andparallel micro genetic algorithms in a multi-machine system. DoBomfim et al. [14] used genetic algorithms to simultaneously tune

Nomenclature
Generalr damping factorDx speed deviationT1, T2, T3, T4 lead/lag time constants of PSSn amount- weight constantX real variables#i;v random numbersi pheromone informationobject objective function valuegi heuristic informationa influence factor of pheromone information~Ijk difference vector between individual j and k for integer
variablesj scaling factor�IGþ1
ih hth gene of ith trial individual vector of (G+1)th genera-tion
e1 desired tolerance for the population diversityð�IGþ1
b ; �XGþ1b Þ best individual
n damping ratiod rotor angleKS gain of the PSSr0 expected damping factorf0 expected damping ratioI integer variablesNP number of individualsPH proportion constant of pheromone
q constant coefficientpi probability of choosing a mutation operatorb influence factor of heuristic informationIGþ1i perturbed individual vector of ith individual for integer
variablesCr crossover factorarg min the argument of the minimume2 desired tolerance for the gene diversity�a step size
SubscriptsZ=1,2,...,nZ index of local machinesRZ=0,1,...,nZ index of remote machinesq=1,2,...nq index of eigenvalues in the systempresent present generationh = 1,...,n index of integer variableN Nth PSSy=1,2,...,ny
index of system operating conditionsi=1,2,...,NP index of individualsj index of the genesg = (n + 1),...,m index of real variable
Superscripts0 initial valueG index of the generationbest best value
S.-K. Wang et al. / Electrical Power and Energy Systems 31 (2009) 34–42 35
multiple power system damping controllers with the objectivefunction of the sum of the spectrum damping ratios for all operat-ing conditions. These studies did not consider the remote feedbacksignals, which are available from synchronized phasor measure-ment units [15–17]. Kamwa et al. [18,19] used a decentralized/hierarchical control system with two global signals and one localsignal as input of PSSs. The global signals obtained the highest con-trollability of these oscillation modes. Hasanovic and Feliachi [20]used a genetic algorithm to accomplish simultaneous tuning ofmultiple power system damping controllers. Both local and remotemeasurement signals have been considered as input signals to thedamping controllers. However, the remote measurements are con-sidered only in a 4-machine system, and that remote signal is notdetermined from the computational results. Su and Lee [21,22]used improved mixed-integer hybrid differential evolution to solv-ing network reconfiguration and capacitor placement problems ofa distribution system, but those problems only contain integerdecision variables.
Chiou et al. [23] developed the ant direction hybrid differentialevolution (ADHDE) method, which utilizes the concept of an antcolony search to find a suitable mutation strategy in the HDEmethod [24,25] to accelerate the search for the global solution.The ADHDE has proved that it can obtain excellent computation re-sults to the optimization problems of integer variables in thecapacitor placement problem [23], but it has not been investigatedin terms optimization problems consisting of both integer and realvariables. In order to rapidly find a global solution by ADHDE, theaccelerated phase is added in this algorithm. In this study, the ma-chine numbers of remote feedback signals are regarded as the inte-ger variable. Therefore, the proposed optimization algorithm musthave the ability to search out the set of optimal solutions of integerand real variables at the same time. The optimization problems ofboth real and integer variables are generally called mixed-integernonlinear programming problems. The original ADHDE algorithm
gives it the ability to search out a set optimal solution of integerand real variables at the same time, so the algorithm is called themixed-integer ant direction hybrid differential evolution algorithm(MIADHDE). The MIADHDE algorithm in this study is proposed todetermine the optimal gain, time constants, and machine numbersof remote feedback signals of PSSs for the multi-machine systemby three different objective functions. The three objective functionswill be compared in terms of performance by the degree of systemdamped.
2. Problem formulation
2.1. Power system model
In this study, each generator is modeled as a two-axis model,which is a six-order model. The state vector of the generator is gi-ven as ½Dx; d;/fd;/1d;/1q;/2q�, where Dx and d are the speed devi-ation and rotor angle, respectively, and /fd;/1d;/1q and /2q are thecontribution to the rotor flux linkage as a result of field winding,one d-axis and two q-axis amortisseur circuits, respectively [26].These device models of a power system include generators, PSSs,and excitation systems, and can be formulated by:
_x ¼ f ðx; r; tÞ ð1Þ
where x is the vector of all state variables, and r is the vector of in-put variables. In the PSS design, the power system is usually linear-ized in terms of a perturbed value in order to perform the smallsignal analysis. Therefore, Eq. (1) can be represented as:
D _x ¼ ADxþ BDv
Du ¼ CDxþ DDv
(ð2Þ
where A is the power system state matrix, B is the input matrix, C isthe output matrix, D is the feedforward matrix, v is the vector of the

36 S.-K. Wang et al. / Electrical Power and Energy Systems 31 (2009) 34–42
network bus voltages, and u is the current vector of the injectioninto the network from the device [26].
The PSSs with a lead-lag structure of speed deviation input areconsidered in this study, and the transfer function of the Nth PSS isgiven by Eq. (3). It contains a remote feedback signal of speed devi-ation, DxRZ .
VSNðsÞ ¼ KSNsTWN
ð1þ sTWNÞð1þ sT1NÞð1þ sT2NÞ
ð1þ sT3NÞð1þ sT4NÞ
ðDxZ � DxRZÞ ð3Þ
where T1N, T2N, T3N, T4N, and KSN are the time constants and gain ofthe Nth PSS, Z = 1, 2,...,nZ is the index of machines, nZ is the numberof machines, DxZ is the speed deviation of the Zth local machine,DxRZ is the speed deviation of the RZth remote machine, RZ = 0, 1,2,...,nZ is the index of remote machines, and RZ = 0 represents thatthe PSS has no remote feedback signal, DxRZ ¼ 0. However, the con-servative assumption that the effect of communication delay can beneglected is made. The time constant TWN in the washout filter isusually kept constant during the optimization. Which typical valueis between 10 and 20 so that obtains well phase compensation per-formance. However, the washout time constant is fixed at 10 in thisstudy.
2.2. Objective function
When a disturbance occurs, the decaying rate of the power sys-tem oscillation is dominated by the maximum damping factor inthe system, and the amplitude of the each oscillation mode isdetermined by its damping ratio. Thus, the objective functions nat-urally include the damping factor and the damping ratio in the for-mulation for the tuning of PSS parameters. In this paper, threeobjective functions are considered.
(1) The first objective function for the optimal PSS parametersmay be formulated as follows:
MinF1 ¼Xny
y¼1
Xrq;yPr0
ðrq;y � r0Þ2 þ- �Xny
y¼1
Xfq;y6f0
ðf0 � fq;yÞ ð4Þ
subject toKSN;min 6 KSN 6 KSN;max
T1N;min 6 T1N 6 T1N;max
T2N;min 6 T2N 6 T2N;max
T3N;min 6 T3N 6 T3N;max
T4N;min 6 T4N 6 T4N;max
8>>>>>><>>>>>>:
ð5Þ
where y = 1, 2, 3,...,ny is the index of system operating conditionsconsidered in this design process, q = 1, 2,...,nq, is the index of eigen-values in the system, rq;y is the damping factor of the qth eigenvalueof the yth operating condition, r0 is a constant value of the expecteddamping factor, - is a weight for combining both damping factorsand damping ratios, fq;y is the damping ratio of the qth eigenvalue ofthe yth operating condition, and finally, f0 is a constant value of theexpected damping ratio. The constraint set is made up of bounds ofPSS parameters, which can be formulated as Eq. (5), and the speeddeviation measurement signals of the remote machine are ne-glected; DxRZ ¼ 0 in this formulation. The objective function onlyforces the unstable or lightly damped electromechanical oscillationmodes to be relocated, an objective function similar to the best onein the literature [8]. In the Eq. (4), the damping ratio difference isless than 1; if we take each square for this term, then the objectivefunction is unable to determine the optimum solution. The bestobjective value is zero for this function.
(2) The second objective function for tuning PSS parametersmay be chosen to minimize the following function.
MinF2 ¼Xny
y¼1
ðmax16q6nq
rq � r0Þy þ-Xny
y¼1
ðf0 � min16q6nq
fqÞy ð6Þ
where max rq and min fq are the maximum real part of the eigen-values and the minimum of the damping ratio, respectively, in theyth system operating condition. The objective function not only relo-cates the unstable or lightly damped oscillation modes to the leftside of the s-plane but also shifts other oscillation modes more tothe left side of the s-plane. The same constraints as Eq. (5) are used,and the speed deviation measurement signals of the remote ma-chine are neglected, so DxRZ ¼ 0 in this formulation.
3) The third objective function is the same as Eq. (6) but has dif-ferent constraints, as follows.
MinF3 ¼Xny
y¼1
ðmax16q6nq
rq � r0Þy þ-Xny
y¼1
ðf0 � min16q6nq
fqÞy ð7Þ
The constraints add the speed deviation measurement signals ofremote machines for the input to PSSs in Eq. (8), except the sameconstraints as Eq. (5) are used.
0 6 RZ 6 nZ ; where RZ–Z ð8Þ
3. MIADHDE algorithm
The ADHDE algorithm developed by Chiou et al. can be found inthe literature [23]. The main idea of ADHDE is to use the ant colonysearch system to find the proper mutation operator to acceleratethe search for the global solution. The MIADHDE algorithm im-proves the ADHDE to deal with the optimization problem of simul-taneously including integer and real variables and to add theaccelerated phase with the aim of faster convergence. The MIAD-HDE algorithm is briefly described below.
Step 1. InitializationThe initial population and load system data are created. Some
initial populations are randomly chosen, and they endeavor to cov-er the complete parameter space uniformly. The elements of everyrandom variable ðI0
i ;X0i Þ are assumed as follows
ðI0i ;X
0i Þ ¼ ðIi;min;Xi;minÞ þ ðINTð#iðIi;max � Ii;minÞÞ;#iðXi;max � Xi;minÞÞ; i ¼ 1; . . . ;Np
ð9Þ
where #i 2 ð0;1� is a random number, and INT operator is repre-sented to take the nearest integer. The two variables, X and I, arereal and integer variables, respectively. The initial process can cre-ate Np individuals of ðI0
i ;X0i Þ randomly.
Step 2. Ant direction searchIn every generation, each of Np ants selects a mutation operator
according to heuristic information and pheromone information.Different from [27–32], the difference between the objectivefunction value in the next generation and the best objective func-tion value of the present generation constructs a fluctuant phero-mone quantity. The fluctuant pheromone quantity is defined asfollows:
Dsi ¼Q
PH ; if the proper mutation operator is chosen0; otherwise
(; i¼ 1; . . . ;Np
ð10Þ
In Eq. (10), the proper mutation operator is chosen when theobjective function value of the next generation is better than thebest objective function value of the present generation. Where Qis a constant, PH is defined as follows:
PH ¼ objectnew
objectbestpresent � objectnew
���������� ð11Þ

S.-K. Wang et al. / Electrical Power and Energy Systems 31 (2009) 34–42 37
where objectbestpresent expresses the best objective function value of the
present generation and objectnew expresses the objective functionvalue of the next generation. The pheromone updating applies thefollowing rule.
sNewi ¼ q � sOld
i þ Dsi ð12Þ
The coefficient q must be fixed to a value <1 to avoid an unlim-ited accumulation of trace. The magnitude of the new pheromoneis updated by vaporizing ð1� qÞ percent of the pheromones fromthe previous iteration and the fluctuant pheromone quantity inthe current iteration. It is observed that the probability of select-ing a mutation operator is proportional to the pheromone quan-tity si and the information gi:. The information gi is defined asfollows:
gi ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiXn
j¼1
ððIGij � IG
bjÞ=IGijÞ
2 þXm
j¼nþ1
ððXGij � XG
bjÞ=XGijÞ
2
vuut ð13Þ
where ðIGij ;X
Gij Þ denotes the jth gene of the ith individual in a popula-
tion in the Gth generation, and ðIGbj;X
GbjÞ denotes the jth gene of the
best individual in a population in the Gth generation. Hence, theprobability of choosing a mutation operator is defined as follows:
piðtÞ ¼sa
kðtÞ � gbkPNp
k¼1sakðtÞ � g
bk
ð14Þ
where a and b are parameters to regulate the influence of si and gi;,respectively. At the same time, the probabilities are arranged inascending order. The initial value of probability for choosing amutation operator is first defined as P = [p1, p2, p3, p4, p5] = [0.2,0.4, 0.6, 0.8, 1.0]. Subsequently, the five integers 1, 2, 3, 4, 5 are ran-domly arranged. For example, if the resultant arrangement is [1, 3,5, 2, 4], then by relating this arrangement to P, we have the proba-bilities of choosing mutation operators for strategy 1 = 0 � 0.2,strategy 3 = 0.2 � 0.4, strategy 5 = 0.4 � 0.6, strategy 2 = 0.6 � 0.8,and strategy 4 = 0.8 � 1.0.
Step 3. Mutation operationAccording to the probability of choosing a mutation strategy,
the corresponding mutation operation and a random numberv 2 ½0;1� determine the proper mutation strategy. Assume thatthe probability of choosing a mutation operator is P = [0.313,0.641, 0.647, 0.813, 0.981], and the corresponding mutation oper-ation is [1, 3, 5, 2, 4]. Suppose that the random number v is equalto 0.567, which is between 0.313 and 0.641; then the third muta-tion strategy is determined. This process is repeated for everyindividual.
Five mutation strategies have been introduced by [33–34]. Theessential ingredient in the mutation operation is the differencevector. Each individual pair in a population at the Gth generationdefines a difference vector ð~Ijk; ~XjkÞ as
~Ijk ¼ IGj � IG
k
~Xjk ¼ XGj � XG
k
(ð15Þ
The mutation process at the Gth generation begins by randomlyselecting either two or four population individualsðIG
j ; XGj Þ; ðI
Gk ; XG
k Þ; ðIGl ; XG
l Þ and ðIGm; XG
mÞ for any j, k, l and m, accordingto five mutation strategies. These four individuals are then com-bined to form a difference vector ð~Ijklm; ~XjklmÞ as
~Ijklm ¼ ~Ijk þ~Ilm ¼ ðIGj � IG
k Þ þ ðIGl � IG
mÞ~Xjklm ¼ ~Xjk þ ~Xlm ¼ ðXG
j � XGk Þ þ ðX
Gl � XG
mÞ
(ð16Þ
A perturbed individual is then generated based on the presentindividual in the mutation process by
ðIGþ1i ; XGþ1
i Þ ¼ ðIGp ;X
Gp Þ þ ðINTðj �~IjklmÞ;j � ~XjklmÞ ð17Þ
where the scaling factor, j; is a constant, and j, k, l and m are ran-domly selected.
The perturbed individual in Eq. (17) is essentially a noisy replicaof ðIG
p ; XGp Þ: Herein, the parent individual ðIG
p ; XGp Þ depends on the
circumstance in which the type of the mutation operations isemployed.
Step 4. Crossover operationIn order to extend the diversity of further individuals at the next
generation, the perturbed individual of ðXGþ1i ; IGþ1
i Þ and the presentindividual of ðXG
i ; IGi Þ are chosen by a binomial distribution to pro-
gress the crossover operation to generate the offspring. Each geneof the ith individual is reproduced from the perturbed individualðIGþ1
i ; XGþ1i Þ ¼ ½IGþ1
i1 ; IGþ1i2 ; . . . ; IGþ1
in ; XGþ1iðnþ1Þ; X
Gþ1iðnþ2Þ; . . . ; XGþ1
im � and thepresent individual ðIG
i ; XGi Þ ¼ ½I
Gi1; I
Gi2; . . . ; Iin;X
Giðnþ1Þ;X
Giðnþ2Þ; . . . ;XG
im; �:That is,
�IGþ1ih ¼
IGih; if a random number > Cr
IGþ1ih ; otherwise
(
�XGþ1ig ¼
XGig ; if a random number > Cr
XGþ1ig ; otherwise
(8>>>>><>>>>>:
ð18Þ
where i ¼ 1; . . . ;Np; h ¼ 1; . . . ; n; g ¼ ðnþ 1Þ; . . . ;m, and the cross-over factor Cr 2 ½0;1� is assigned by the user.
Step 5. Estimation and selectionThe evaluation function of a child is one-to-one competed to that
of its parent. This competition means that the parent is replaced byits child if the fitness of the child is better than that of its parent. Onthe other hand, the parent is retained in the next generation if thefitness of the child is worse than that of its parent, i.e.
ðIGþ1i ;XGþ1
i Þ ¼ arg minfFðIGi ;X
Gi Þ; Fð�IGþ1
i ; �XGþ1i Þg ð19Þ
ðIGþ1b ;XGþ1
b Þ ¼ arg minfFðIGþ1i ;XGþ1
i Þg ð20Þ
where arg min means the argument of the minimum.Step 6. Migrating operation if necessaryIn order to effectively enhance the investigation of the search
space and reduce the choice pressure of a small population, amigration phase is introduced to regenerate a new diverse popula-tion of individuals. The best individual ðIGþ1
b ;XGþ1b Þis selected to cre-
ate the new population. The hth or gth gene of the ith individual is asin equation Eq. (21) and where #ih; #ig and k are randomly gener-ated numbers uniformly distributed in the range of [0,1].
IGþ1ih ¼ IGþ1
bh þ INTð#ih � ðIh min � IGþ1bh ÞÞ; if k <
IGþ1bh�Ih min
Ih max�Ih min
IGþ1bh þ INTð#ih � ðIh max � IGþ1
bh ÞÞ; otherwise
8<:
XGþ1ig ¼
XGþ1bg þ #ig � ðXg min � XGþ1
bg Þ; if k <XGþ1
bg�Xg min
Xg max�Xg min
XGþ1bg þ #ig � ðXg max � XGþ1
bg Þ; otherwise
8<:
8>>>>>>><>>>>>>>:
ð21Þ
The migrating operation is executed only if a measure fails tomatch the desired tolerance of population diversity. The measureis defined as Eq. (22).
e ¼XNp
i¼1i–b
Xn
j¼1
gI þXm
j¼nþ1
gX
!,m � ðNp � 1Þ� �
< e1 ð22Þ
where
gI ¼0; if IGþ1
ij ¼ IGþ1ib
1; otherwise
(
gX ¼0; if
XGþ1ij�XGþ1
ib
XGþ1ib
�������� < e2
1; otherwise
8<:
8>>>>>><>>>>>>:
ð23Þ
38 S.-K. Wang et al. / Electrical Power and Energy Systems 31 (2009) 34–42
Parameters e1; e2 2 ½0;1� express the desired tolerance for thepopulation diversity and the gene diversity with respect to the bestindividual, and gI and gX are the scale indices. From Eqs. (22) and(23), it can be seen that the value e is in the range of ½0;1�. If e issmaller than e1; then the migrating operation is executed to gener-ate a new population to escape the local point; otherwise, themigrating operation is turned off.
Step 7. Accelerated operation if necessaryWhen the best individual at the present generation is not im-
proved any longer by the mutation and crossover operations, a de-cent method is then employed to push the present best individual
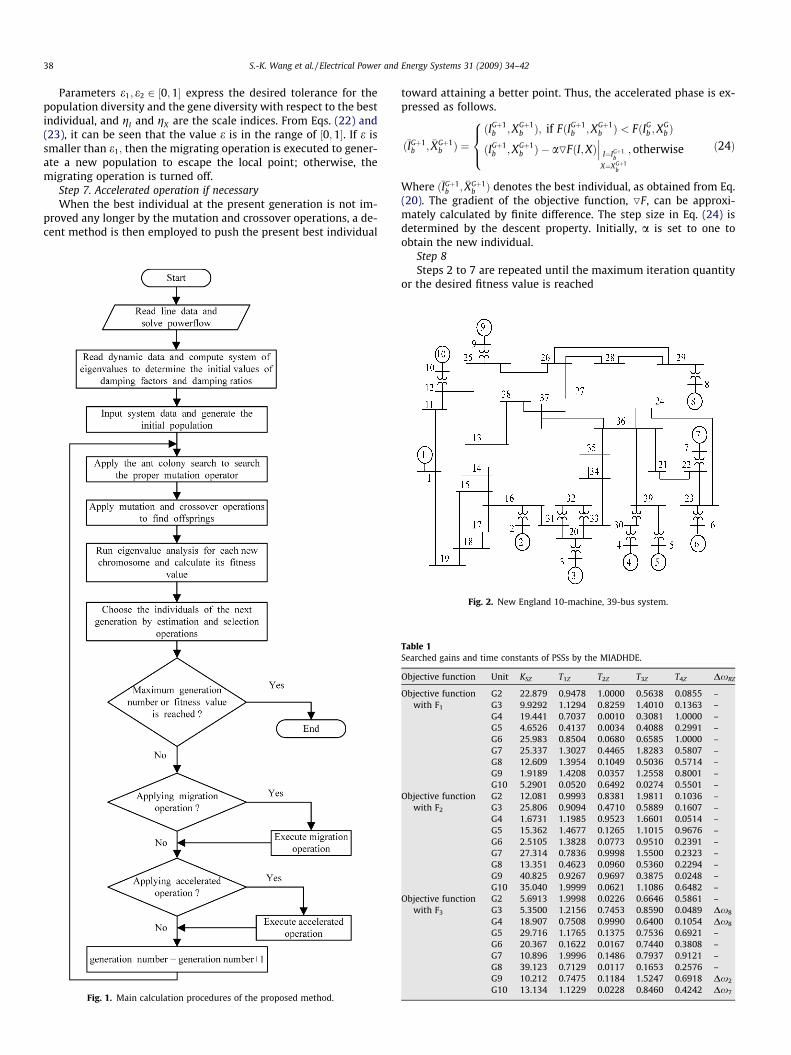
Fig. 1. Main calculation procedures of the proposed method.
toward attaining a better point. Thus, the accelerated phase is ex-pressed as follows.
ð�IGþ1b ; �XGþ1
b Þ ¼ðIGþ1
b ;XGþ1b Þ; if FðIGþ1
b ;XGþ1b Þ < FðIG
b ;XGb Þ
ðIGþ1b ;XGþ1
b Þ � aOFðI;XÞ��� I¼IGþ1
b
X¼XGþ1b
;otherwise
8><>: ð24Þ
Where ð�IGþ1b ; �XGþ1
b Þ denotes the best individual, as obtained from Eq.(20). The gradient of the objective function, OF, can be approxi-mately calculated by finite difference. The step size in Eq. (24) isdetermined by the descent property. Initially, a is set to one toobtain the new individual.
Step 8Steps 2 to 7 are repeated until the maximum iteration quantity
or the desired fitness value is reached
Fig. 2. New England 10-machine, 39-bus system.
Table 1Searched gains and time constants of PSSs by the MIADHDE.
Objective function Unit KSZ T1Z T2Z T3Z T4Z DxRZ
Objective functionwith F1
G2 22.879 0.9478 1.0000 0.5638 0.0855 –G3 9.9292 1.1294 0.8259 1.4010 0.1363 –G4 19.441 0.7037 0.0010 0.3081 1.0000 –G5 4.6526 0.4137 0.0034 0.4088 0.2991 –G6 25.983 0.8504 0.0680 0.6585 1.0000 –G7 25.337 1.3027 0.4465 1.8283 0.5807 –G8 12.609 1.3954 0.1049 0.5036 0.5714 –G9 1.9189 1.4208 0.0357 1.2558 0.8001 –G10 5.2901 0.0520 0.6492 0.0274 0.5501 –
Objective functionwith F2
G2 12.081 0.9993 0.8381 1.9811 0.1036 –G3 25.806 0.9094 0.4710 0.5889 0.1607 –G4 1.6731 1.1985 0.9523 1.6601 0.0514 –G5 15.362 1.4677 0.1265 1.1015 0.9676 –G6 2.5105 1.3828 0.0773 0.9510 0.2391 –G7 27.314 0.7836 0.9998 1.5500 0.2323 –G8 13.351 0.4623 0.0960 0.5360 0.2294 –G9 40.825 0.9267 0.9697 0.3875 0.0248 –G10 35.040 1.9999 0.0621 1.1086 0.6482 –
Objective functionwith F3
G2 5.6913 1.9998 0.0226 0.6646 0.5861 –G3 5.3500 1.2156 0.7453 0.8590 0.0489 Dx8
G4 18.907 0.7508 0.9990 0.6400 0.1054 Dx8
G5 29.716 1.1765 0.1375 0.7536 0.6921 –G6 20.367 0.1622 0.0167 0.7440 0.3808 –G7 10.896 1.9996 0.1486 0.7937 0.9121 –G8 39.123 0.7129 0.0117 0.1653 0.2576 –G9 10.212 0.7475 0.1184 1.5247 0.6918 Dx2
G10 13.134 1.1229 0.0228 0.8460 0.4242 Dx7
S.-K. Wang et al. / Electrical Power and Energy Systems 31 (2009) 34–42 39
These computational procedures search configurations withvarious gain and time constants of PSS parameters so as to succes-sively reduce the fitness function value. The solution proceduresstart off with performing calculations of power flows for variousoperating conditions, and then small signal analysis calculatesthe eigenvalues, oscillation frequencies, and damping ratios forvarious operating conditions of the complete system. This compu-tational process of the MIADHDE algorithm for finding the optimalsmall signal stability solution is stated using the flowchart shownin Fig. 1.
4. Simulation results
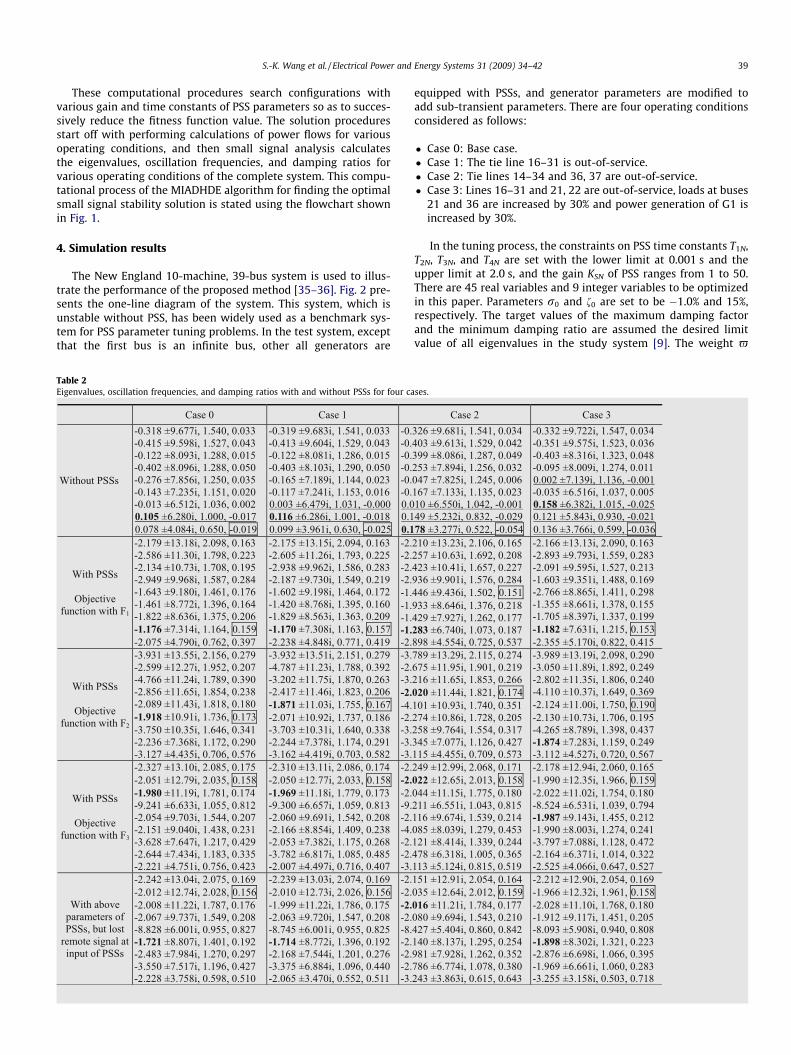
The New England 10-machine, 39-bus system is used to illus-trate the performance of the proposed method [35–36]. Fig. 2 pre-sents the one-line diagram of the system. This system, which isunstable without PSS, has been widely used as a benchmark sys-tem for PSS parameter tuning problems. In the test system, exceptthat the first bus is an infinite bus, other all generators are
Table 2Eigenvalues, oscillation frequencies, and damping ratios with and without PSSs for four ca
equipped with PSSs, and generator parameters are modified toadd sub-transient parameters. There are four operating conditionsconsidered as follows:
� Case 0: Base case.� Case 1: The tie line 16–31 is out-of-service.� Case 2: Tie lines 14–34 and 36, 37 are out-of-service.� Case 3: Lines 16–31 and 21, 22 are out-of-service, loads at buses
21 and 36 are increased by 30% and power generation of G1 isincreased by 30%.
In the tuning process, the constraints on PSS time constants T1N,T2N, T3N, and T4N are set with the lower limit at 0.001 s and theupper limit at 2.0 s, and the gain KSN of PSS ranges from 1 to 50.There are 45 real variables and 9 integer variables to be optimizedin this paper. Parameters r0 and f0 are set to be �1.0% and 15%,respectively. The target values of the maximum damping factorand the minimum damping ratio are assumed the desired limitvalue of all eigenvalues in the study system [9]. The weight -
ses.
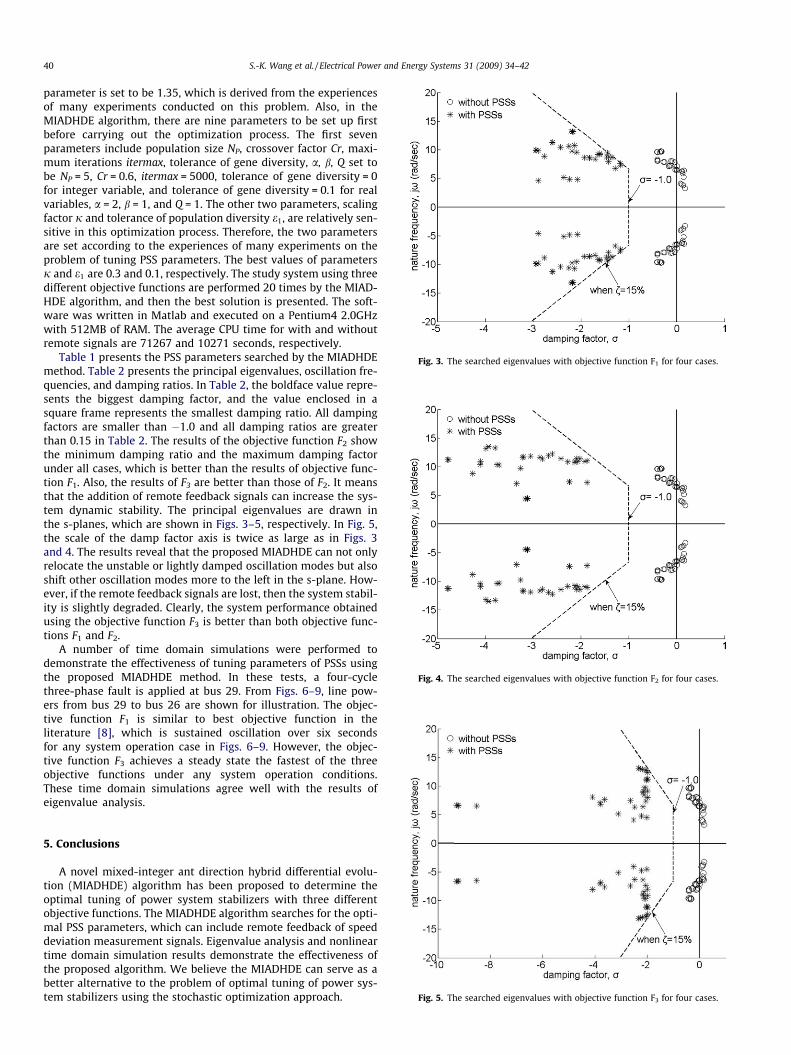
Fig. 3. The searched eigenvalues with objective function F1 for four cases.
Fig. 4. The searched eigenvalues with objective function F2 for four cases.
40 S.-K. Wang et al. / Electrical Power and Energy Systems 31 (2009) 34–42
parameter is set to be 1.35, which is derived from the experiencesof many experiments conducted on this problem. Also, in theMIADHDE algorithm, there are nine parameters to be set up firstbefore carrying out the optimization process. The first sevenparameters include population size NP, crossover factor Cr, maxi-mum iterations itermax, tolerance of gene diversity, a, b, Q set tobe NP = 5, Cr = 0.6, itermax = 5000, tolerance of gene diversity = 0for integer variable, and tolerance of gene diversity = 0.1 for realvariables, a = 2, b = 1, and Q = 1. The other two parameters, scalingfactor j and tolerance of population diversity e1, are relatively sen-sitive in this optimization process. Therefore, the two parametersare set according to the experiences of many experiments on theproblem of tuning PSS parameters. The best values of parametersj and e1 are 0.3 and 0.1, respectively. The study system using threedifferent objective functions are performed 20 times by the MIAD-HDE algorithm, and then the best solution is presented. The soft-ware was written in Matlab and executed on a Pentium4 2.0GHzwith 512MB of RAM. The average CPU time for with and withoutremote signals are 71267 and 10271 seconds, respectively.
Table 1 presents the PSS parameters searched by the MIADHDEmethod. Table 2 presents the principal eigenvalues, oscillation fre-quencies, and damping ratios. In Table 2, the boldface value repre-sents the biggest damping factor, and the value enclosed in asquare frame represents the smallest damping ratio. All dampingfactors are smaller than �1.0 and all damping ratios are greaterthan 0.15 in Table 2. The results of the objective function F2 showthe minimum damping ratio and the maximum damping factorunder all cases, which is better than the results of objective func-tion F1. Also, the results of F3 are better than those of F2. It meansthat the addition of remote feedback signals can increase the sys-tem dynamic stability. The principal eigenvalues are drawn inthe s-planes, which are shown in Figs. 3–5, respectively. In Fig. 5,the scale of the damp factor axis is twice as large as in Figs. 3and 4. The results reveal that the proposed MIADHDE can not onlyrelocate the unstable or lightly damped oscillation modes but alsoshift other oscillation modes more to the left in the s-plane. How-ever, if the remote feedback signals are lost, then the system stabil-ity is slightly degraded. Clearly, the system performance obtainedusing the objective function F3 is better than both objective func-tions F1 and F2.
A number of time domain simulations were performed todemonstrate the effectiveness of tuning parameters of PSSs usingthe proposed MIADHDE method. In these tests, a four-cyclethree-phase fault is applied at bus 29. From Figs. 6–9, line pow-ers from bus 29 to bus 26 are shown for illustration. The objec-tive function F1 is similar to best objective function in theliterature [8], which is sustained oscillation over six secondsfor any system operation case in Figs. 6–9. However, the objec-tive function F3 achieves a steady state the fastest of the threeobjective functions under any system operation conditions.These time domain simulations agree well with the results ofeigenvalue analysis.
Fig. 5. The searched eigenvalues with objective function F3 for four cases.
5. Conclusions
A novel mixed-integer ant direction hybrid differential evolu-tion (MIADHDE) algorithm has been proposed to determine theoptimal tuning of power system stabilizers with three differentobjective functions. The MIADHDE algorithm searches for the opti-mal PSS parameters, which can include remote feedback of speeddeviation measurement signals. Eigenvalue analysis and nonlineartime domain simulation results demonstrate the effectiveness ofthe proposed algorithm. We believe the MIADHDE can serve as abetter alternative to the problem of optimal tuning of power sys-tem stabilizers using the stochastic optimization approach.
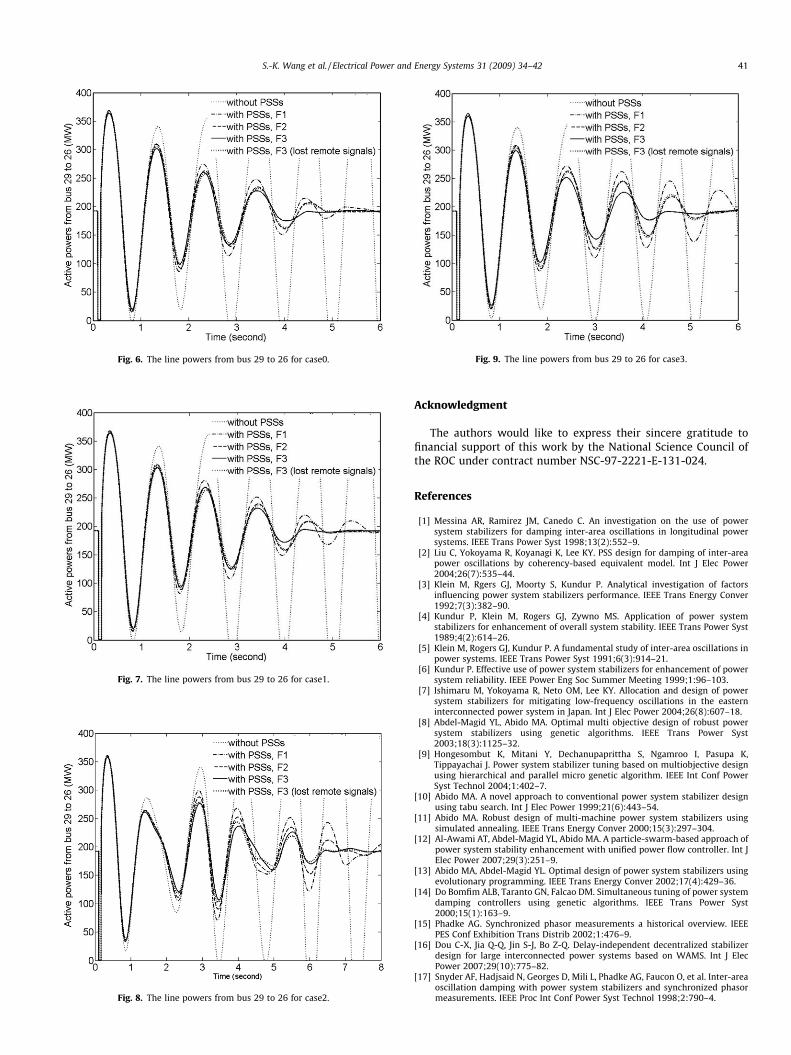
Fig. 6. The line powers from bus 29 to 26 for case0.
Fig. 7. The line powers from bus 29 to 26 for case1.
Fig. 8. The line powers from bus 29 to 26 for case2.
Fig. 9. The line powers from bus 29 to 26 for case3.
S.-K. Wang et al. / Electrical Power and Energy Systems 31 (2009) 34–42 41
Acknowledgment
The authors would like to express their sincere gratitude tofinancial support of this work by the National Science Council ofthe ROC under contract number NSC-97-2221-E-131-024.
References
[1] Messina AR, Ramirez JM, Canedo C. An investigation on the use of powersystem stabilizers for damping inter-area oscillations in longitudinal powersystems. IEEE Trans Power Syst 1998;13(2):552–9.
[2] Liu C, Yokoyama R, Koyanagi K, Lee KY. PSS design for damping of inter-areapower oscillations by coherency-based equivalent model. Int J Elec Power2004;26(7):535–44.
[3] Klein M, Rgers GJ, Moorty S, Kundur P. Analytical investigation of factorsinfluencing power system stabilizers performance. IEEE Trans Energy Conver1992;7(3):382–90.
[4] Kundur P, Klein M, Rogers GJ, Zywno MS. Application of power systemstabilizers for enhancement of overall system stability. IEEE Trans Power Syst1989;4(2):614–26.
[5] Klein M, Rogers GJ, Kundur P. A fundamental study of inter-area oscillations inpower systems. IEEE Trans Power Syst 1991;6(3):914–21.
[6] Kundur P. Effective use of power system stabilizers for enhancement of powersystem reliability. IEEE Power Eng Soc Summer Meeting 1999;1:96–103.
[7] Ishimaru M, Yokoyama R, Neto OM, Lee KY. Allocation and design of powersystem stabilizers for mitigating low-frequency oscillations in the easterninterconnected power system in Japan. Int J Elec Power 2004;26(8):607–18.
[8] Abdel-Magid YL, Abido MA. Optimal multi objective design of robust powersystem stabilizers using genetic algorithms. IEEE Trans Power Syst2003;18(3):1125–32.
[9] Hongesombut K, Mitani Y, Dechanupaprittha S, Ngamroo I, Pasupa K,Tippayachai J. Power system stabilizer tuning based on multiobjective designusing hierarchical and parallel micro genetic algorithm. IEEE Int Conf PowerSyst Technol 2004;1:402–7.
[10] Abido MA. A novel approach to conventional power system stabilizer designusing tabu search. Int J Elec Power 1999;21(6):443–54.
[11] Abido MA. Robust design of multi-machine power system stabilizers usingsimulated annealing. IEEE Trans Energy Conver 2000;15(3):297–304.
[12] Al-Awami AT, Abdel-Magid YL, Abido MA. A particle-swarm-based approach ofpower system stability enhancement with unified power flow controller. Int JElec Power 2007;29(3):251–9.
[13] Abido MA, Abdel-Magid YL. Optimal design of power system stabilizers usingevolutionary programming. IEEE Trans Energy Conver 2002;17(4):429–36.
[14] Do Bomfim ALB, Taranto GN, Falcao DM. Simultaneous tuning of power systemdamping controllers using genetic algorithms. IEEE Trans Power Syst2000;15(1):163–9.
[15] Phadke AG. Synchronized phasor measurements a historical overview. IEEEPES Conf Exhibition Trans Distrib 2002;1:476–9.
[16] Dou C-X, Jia Q-Q, Jin S-J, Bo Z-Q. Delay-independent decentralized stabilizerdesign for large interconnected power systems based on WAMS. Int J ElecPower 2007;29(10):775–82.
[17] Snyder AF, Hadjsaid N, Georges D, Mili L, Phadke AG, Faucon O, et al. Inter-areaoscillation damping with power system stabilizers and synchronized phasormeasurements. IEEE Proc Int Conf Power Syst Technol 1998;2:790–4.

42 S.-K. Wang et al. / Electrical Power and Energy Systems 31 (2009) 34–42
[18] Kamwa I, Gerin-Lajoie L, Trudel G. Multi-loop power system stabilizers usingwide-area synchronous phasor measurements. Proc Am Control Conf1998;5:2963–7.
[19] Kamwa I, Grondin R, Hebert Y. Wide-area measurement based stabilizingcontrol of large power systems a decentralized/hierarchical approach. IEEETrans Power Syst 2001;16(1):136–53.
[20] Hasanovic A, Feliachi A. Genetic algorithm based inter-area oscillationdamping controller design using MATLAB. IEEE Power Eng Soc SummerMeeting 2002;3:1136–41.
[21] Su C-T, Lee C-S. Modified differential evolution method for capacitorplacement of distribution systems. IEEE/PES Trans Distrib Conf Exhibition2002;1:208–13.
[22] Su C-T, Lee C-S. Network reconfiguration of distribution systems usingimproved mixed-integer hybrid differential evolution. IEEE Trans PowerDeliver 2003;18(3):1022–7.
[23] Chiou JP, Chang CF, Su CT. Ant direction hybrid differential evolution forsolving large capacitor placement problems. IEEE Trans Power Syst2004;19(4):1794–800.
[24] Chiou JP, Wang FS. Hybrid method of evolutionary algorithms for static anddynamic optimization problems with application to a fed-batch fermentationprocess. J Comput Chem Eng 1999;23:1277–91.
[25] Chiou JP, Wang FS. Estimation of monod model parameters by hybriddifferential evolution. J Bioprocess Biosyst Eng 2001;1:109–13.
[26] Kundur P. Power system stability and control. New York: McGraw-Hill;1993.
[27] Haque MH, Rahim AHMA. Determination of first swing stability limit of multi-machine power systems through Taylor series expansions. IEE Proc C1989;136(6):373–80.
[28] Colorni A, Dorigo M, Maniezzo V. An investigation of some properties of an antalgorithm. In: Proc. conf. parallel problem solving from nature, vol. 1.Amsterdam: North-Holland; 1992 p. 509–20.
[29] Dorigo M, Gambardella LM. Ant colonies for the traveling salesman problem.BioSystems; 1997.
[30] Yu IK, Chou CS, Song YH. Application of the ant colony search algorithm toshort-term generation scheduling problem of thermal units. Proc Int ConfPower Syst Technol 1998;1:552–6.
[31] Sisworahardio NS, El-Keib AA. Unit commitment using the ant colony searchalgorithm. Conf Power Eng 2002 Large Eng Syst 2002:2–6.
[32] Huang SJ. Enhancement of hydroelectric generation scheduling using antcolony system based optimization approaches. IEEE Trans Energy Conver2001;16(3):296–301.
[33] Storn R, Price K. Minimizing the real functions of the ICEC ‘96 contest bydifferential evolution. IEEE Proc Int Conf Evolut Comput 1996:842–4 [Nagoya,Japan].
[34] Storn R. On the usage of differential evolution for function optimization.NAFIPS 1996. Biennial Conf of the North American 1996: 519–23 [Berkeley].
[35] Pai MA. Energy function analysis for power system stability. Norwell: Kluwer;1989.
[36] Padiyar KR. Power system dynamics stability and control. New York: JohnWiley; 1996.