p a rtia l k -spa ce r eco ns truct io nkarla/reading_group/lecture_notes/recon_pauly_read.pdf · p...
TRANSCRIPT

Chapter 2
Partial k-Space Reconstruction
2.1 Motivation for Partial k-Space Reconstruction
In theory, most MRI images depict the spin den-sity as a function of position, and hence should bereal valued. If this were true, then by the sym-metry of the Fourier transform, only half of thespatial-frequency data will need to be collected.Since real functions have conjugate symmetry inspatial frequency space, the uncollected data couldbe synthesized by reflecting conjugate data acrossthe origin. Unfortunately, there are many sourcesof phase errors that cause the real-valued assump-tion to be violated. These include variations inthe resonance frequency, flow, and motion. As aresult, partial k-space reconstructions always re-quire some type of phase correction, to correct forthese sources of incidental phase variation. Thisallows real images to be reconstructed.
An example of a gradient-recalled axial head im-age shown in Fig. 2.1 illustrates the problem. Themagnitude reconstruction of a full k-space acqui-sition is shown in Fig. 2.1a and, the phase inFig. 2.1b. The linear component of the phase hasbeen corrected, leaving only the non-linear compo-nents. The absolute values of the real and imag-inary components are shown in Fig. 2.1c and d.Clearly, a significant amount of phase correction isrequired before the conjugate phase symmetry canbe exploited.
a) Magnitude b) Phase
c) abs(Real) d) abs(Imag)
Figure 2.1: Axial gradient echo image acquired at0.5T with an echo time of 13.8 ms. At this time wa-ter and fat are rephased. The linear shim terms havebeen corrected, leaving the non-linear components dueto susceptabilty shifts.
The reason for this phase is that the precessionfrequency varies across the head. The image phaseis approximately
φ(x, y) = ω(x, y)TE (2.1)
where ω(x, y) is the local resonant frequency inrad/s, and TE is the echo time. This can be due toinhomogeneity of the main magnet. These changes
11

12 CHAPTER 2. PARTIAL K-SPACE RECONSTRUCTION
kx
kyky,max
-ky,max
ky,s
-ky,s
SymmetricallySampled
AsymmetricallySampled
Figure 2.2: Partial k-space acquisition for reducingscan time by reducing the number of phase encodesrequired.
in frequency vary slowly with spatial position, andcan in theory be calibrated out of the system withproper shimming. More fundamental, and moreproblematic, is the variation in frequency due tothe magnetic susceptibility difference between tis-sue and air. At air-tissue interfaces it is commonto see local frequency shifts of several parts-per-million (ppm). These are seen in these images inthe brain tissue adjacent to the ears, which is di-rectly above the auditory canal, and around thenasal passages. An additional problem is thatthese shifts can occur over relatively short dis-tances, and this governs the amount of resolutionrequired for phase compensation, the amount ofcoverage in k-space that will be required, and ulti-mately how “partial” a partial k-space acquisitioncan be.
2.1.1 2DFT Applications
There are two general applications of 2DFT imag-ing where it is desirable to collect only a fractionof the full k-space data. The first is for reducing
R F
G z
G y
G x
s(t)
kx
kya) b)
Figure 2.3: Pulse sequence with a reduced echo time,resulting in a partial echo readout.
scan time by reducing the number of acquisitionsthat are required to construct an image of a givenresolution. This is illustrated in Fig. 2.2. Slightlymore than half of the complete k-space data is col-lected, allowing the scan time to be reduced byalmost a factor of two.
The second application is for reducing echo times.Here the area of the readout dephasor gradientis reduced so that the echo comes earlier in thereadout window as is shown in Fig. 2.3. This canbe important for reducing flow dependent dephas-ing, and through plane susceptibility-induced sig-nal loss. This case is illustrated in Fig. 2.4.
2.1.2 Applications to Other k-SpaceAcquisition Methods
Partial k-space acquisitions are also of interest formost other k-space acquisition methods. For EPIa partial k-space acquisition reduces the echo time,which can be quite long for a fully symmetric ac-quisition. Reconstruction of this type of partialk-space EPI data is very similar to the reducedphase-encode 2DFT case.
Other trajectories are more interesting. Projec-tion acquisitions can exploit partial k-space sym-metries, as can spiral acquisitions. The proper wayto reconstruct these data sets is still an open re-

2.2. DIRECT PARTIAL K-SPACE RECONSTRUCTION 13
kx
ky
kx,max-kx,max kx,s-kx,s
SymmetricallySampled
AsymmetricallySampled
Figure 2.4: Partial k-space acquisition for reducingecho times by collecting only a fraction of the full echo.
search question. We will briefly describe the issuesand possible solutions below.
2.1.3 Approaches to 2DFT Partial k-Space Reconstruction
We are going to consider two different types of ap-proaches to partial k-space reconstruction. Firstare direct methods. These operate by constructinga real image in a single pass. One example is thehomodyne algorithm [1]. These methods have lim-itations due to the interaction of phase compensa-tion and synthesis of the conjugate data. The sec-ond type of approach addresses these limitationsby using an iterative algorithm. One example ofan iterative algorithm is called POCS for “projec-tion onto convex sets” [2-4]. This operates by it-eratively synthesizing the missing data that wouldbe consistent with the data that was collected. Westart with the direct algorithms, describe their lim-itations, and then move on to iterative algorithms.
2.2 Direct Partial k-Space Re-construction
2.2.1 Trivial Reconstruction by ZeroPadding
The simplest way to reconstruct a partial k-spacedata set is to simply fill the uncollected data(phase-encodes or readout samples) with zeroes.Then, perform the 2DFT and display the magni-tude. This works acceptably if the collected k-space fraction is close to 1, and works poorly asthis fraction approaches 0.5. This is illustratedin Fig. 2.5 for a k-space fraction of 9/16ths. Thereconstruction of the full k-space data is shown in(a), and the reconstruction of the zero-padded par-tial k-space data in (b). The result is significantblurring in the phase-encode direction. Clearlythis is unacceptable, and this motivates the searchfor other solutions.
The reason for the blurring can be identified byconsidering the data set to be the product of afull k-space data set multiplied by a weightingfunction. In this case an offset step function,where the offset corresponds to the k-space frac-tion. This will be denoted W (ky), and is illustratedin Fig. 2.6. The inverse Fourier transform of thisfunction is the impulse response that produces theblurring. If we look at the real component, we seea sharp impulse at the desired resolution plus abroader component that corresponds to the widthof the symmetrically acquired data. There is alsoa significant undesired imaginary component.
2.2.2 Phase Correction and ConjugateSynthesis
In order to correct for the blurring from the trivialreconstruction we need to fill in the missing uncol-lected data. From Fig. 2.1 it is clear that in gen-

14 CHAPTER 2. PARTIAL K-SPACE RECONSTRUCTION
a)
b)
Figure 2.5: Comparison of a reconstruction of a fullk-space data, and a trivial partial k-space reconstruc-tion of the same data set where only 144 of 256 phaseencodes have been used, and the remaining 112 havebeen replaced by zeros. Note the significant blurring inthe phase-encode (left-right) direction.
eral phase correction must be applied before thek-space symmetry can be exploited to synthesizethe missing data. In order to do the phase correc-tion, we will use the narrow strip of data for whichwe have symmetric coverage. The phase of thislow resolution image is then used to phase correctthe partial k-space data. After inverse transform-ing the phase correction, the image reconstructedfrom the partial k-space data is transformed back
W(ky)
ky
y
y
y
abs{w(y)}
real{w(y)}
imag{w(y)}
Figure 2.6: A k-space weighting function W (ky)thattruncates a full k-space data set into a partial k-spacedata set. In this case the k-space fraction is 9/16ths,as in Fig. 2.5. The blurring evident is Fig. 2.5 is dueto the convolution of the inverse transform of W (ky),which is plotted here in absolute value, and real andimaginary components.
to the spatial frequency domain, where the datacorresponding to the missing data is synthesizedby conjugate symmetry,
M(kx, ky) = M∗(−kx,−ky). (2.2)
This process is illustrated in Fig. 2.7. The par-tial k-space data is Mpk(kx, ky), Ms(kx, ky) is thenarrow strip of symmetric data, and mpk(x, y) andms(x, y) are the corresponding images produced bya inverse Fourier transform. The phase correctionfunction is a unit amplitude image with a phasethat is the conjugate of mx(x, y),
p∗(x, y) = e−i# ms(x,y). (2.3)
The problem with this approach is due to the ef-fects of the phase compenstation step near theboundary of the acquired data. The multiplica-tion by the phase compensation function in theimage domain is a convolution in the frequency

2.2. DIRECT PARTIAL K-SPACE RECONSTRUCTION 15
domain, and the size of this convolution functioncan be significant. The fact that the convolutionis operating on zero data for the uncollected phaseencodes produces errors near the boundary. Be-low we will describe a conjugate synthesis methodbased on k-space weighting that reduces this prob-lem, and present some examples of reconstructedimages.
Before proceeding, it is interesting to considerwhat sorts of features we are likely to loose ifwe rely on a phase correction function with lim-ited spatial resolution. Figure 2.8 compares afull k-space reconstruction mf (x, y), left, with thereal part of the phase corrected full-k-space dataRe{mf (x, y)p∗(x, y)}. The difference image isshown on the right. This shows which featureswill tend to be lost in a partial k-space reconstruc-tion. One of the main effects is loss of vessel signal.This is to be expected since the vessels are toosmall to be resolved by the phase compensationfunction, and because motion through the slice se-lect and imaging gradients produces velocity de-pendent phase shifts. The other areas of signalloss are near the air-tissue boundaries such as thesinuses.
The difference image has interesting noise charac-teristics. The backround in the phase correctedimage has lower noise because one component ofthe complex noise has been supressed. Where theimage has significant signal, the difference betweenthe two images is very close to zero. The reasonfor this is illustrated in Fig. 2.9, which shows avector diagram for the sum of two complex num-bers, S the signal from some voxel, and n, thenoise component from that voxel. If |S| >> |n|,only the ni, the component of the noise that isin-phase with the signal, contributes to |S + n|.Hence, |S + n| ≈ |S + ni|, and the magnitude op-eration has suppressed the noise component thatis in quadrature with the signal. A more detaileddescription of this effect, as well as a discussionof the intermediate case where |S| is on the sameorder as the magnitude of |n| is given in [1].
Initial partial k-spacedata set Mpk(kx,ky)
DFT-1
SymmetricData DFT-1
Xp*(x,y)=exp(-i angle{ms(x,y)})
ms(x,y) mpk(x,y)
p*(x,y)mpk(x,y)Phase CorrectedPartial Image Data
DFT
Phase CorrectedPartial k-space Data
Conjugate Symmetry
DFT-1
m(x,y)
Desired Image
Ms(kx,ky)
Figure 2.7: Summary of the phase correction and con-jugate synthesis algorithm.

16 CHAPTER 2. PARTIAL K-SPACE RECONSTRUCTION
abs(mf(x,y)) Re{mf(x,y)p*(x,y)} difference*16
Figure 2.9: A full k-space reconstruction (left), and the real part of the phase corrected image. The phasecorrection function was computed using ±1/16th of the k-space data (corresponding to a 9/16ths k-space re-construction). The difference image shows vessels, as well as areas of rapid local change in phase, such as theair-tissue interfaces in the sinuses.
S+n
S
n
ni
Re
Im
Figure 2.8: Magnitude operator suppression of thenoise component that is in quadrature with the signalvector S. The magnitude of the sum |S +n| is approxi-mately |S +ni|, where ni is the component of the noisethat is in-phase with S.
2.2.3 Homodyne Reconstruction
The drawback with the previous method is that,after phase correction in image space, the datamust be transformed back to the frequency do-
main in order to fill in the missing data, and thenan inverse transform back to the image domain isrequired to reconstruct the final image. Anotherapproach, called homodyne, eliminates these lasttwo transforms. The ways this is done is based onthe symmetry properties of the Fourier transform.
The real part of an image corresponds to the conju-gate symmetric component of the transform. Theimaginary part corresponds to the conjugate anti-symmetric component. The weighting functionthat truncates the full k-space data set to producethe partial k-space data set shown in Fig. 2.6 canbe decomposed into symmetric and anti-symmetriccomponents, as shown in Fig. 2.10.
The imaginary part of the impulse response shownin Fig. 2.6, due to the antisymmetric componentin spatial frequency space in Fig 2.10, will be sup-pressed by retaining the real part of the image.The real part of the impulse response is the in-verse transform of the symmetric component inFig. 2.10, and shows two readily identifiable ele-ments. One is the desired impulse at the origin.The other is a much broader sinc, due to the over-weighting of the low spatial frequencies.

2.2. DIRECT PARTIAL K-SPACE RECONSTRUCTION 17
W(ky)
ky
(W(ky)+W*(-ky))/2
ky
(W(ky)-W*(-ky))/2
ky
Symmetric
Antisymmetric
Figure 2.10: The weighting function that truncatesa full k-space data set to a partial k-space data setcan be decomposed into symmetric and antisymmetriccomponents, corresponding to the real and imaginarycomponents of the impulse response, shown in Fig. 2.6.
The key idea in the homodyne algorithm is topreweight the k-space data so that when we takethe real part of the image data, it corresponds toa uniform weighting in k-space. The simplest ap-proach is illustrated in Fig. 2.11. Here the am-plitude of the high spatial frequencies have beendoubled relative to the symmetrically acquired lowfrequency data.
The only problem with this approach is that thephase correction in image space corresponds to aconvolution in k-space. The weighting of Fig. 2.11has sharp discontinuities that produce transientsfrom this convolution, and this can produce im-age artifacts. As a result, the weighting shown inFig. 2.12 is preferred. The central k-space datais weighted linearly from zero up to 2. Again,the symmetric component is uniform. The anti-
W(ky)
ky
(W(ky)+W*(-ky))/2
ky
(W(ky)-W*(-ky))/2
ky
Symmetric
Antisymmetric
2
Figure 2.11: Doubling the high spatial frequenciesrelative to the central k-space data results in a uniformweighting for the symmetric component of the weight-ing.
symmetric component is also smoother, and thisresults in the imaginary component of the im-pulse response having fewer oscillations, which canalso reduce image artifacts. Other, even smootherweightings can also be used.
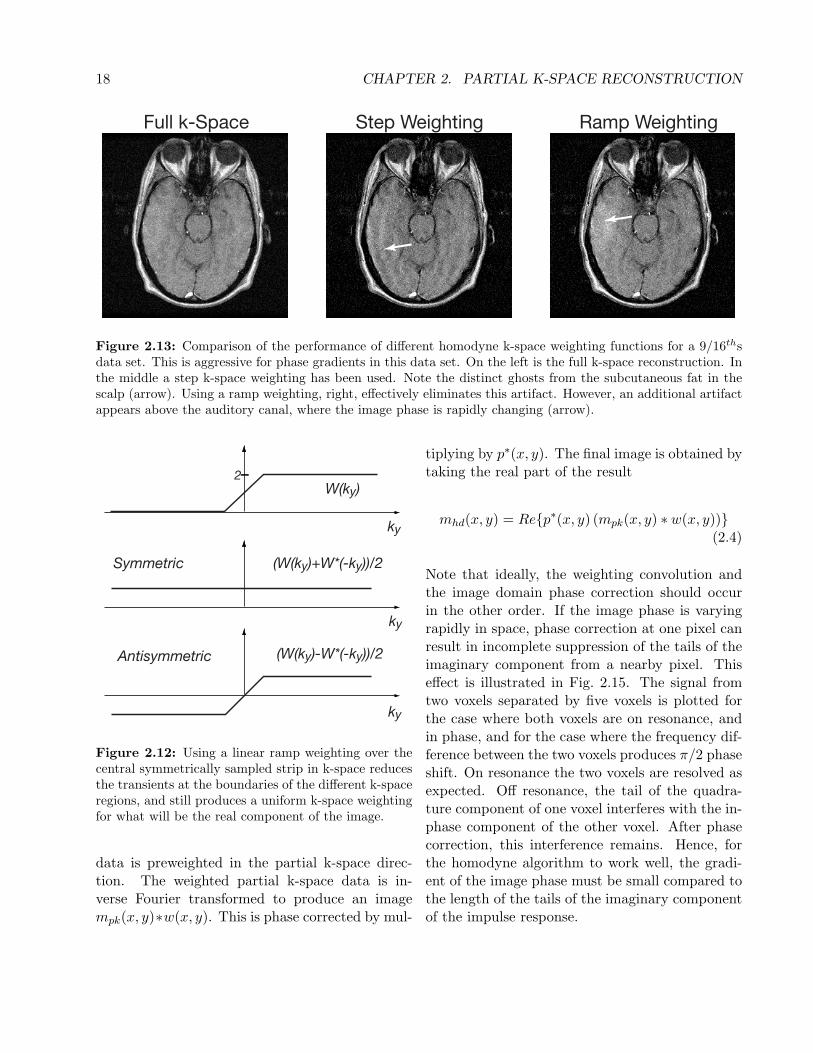
A comparison of homodyne reconstructions of thegradient recalled echo data from Fig. 2.1 is shownin Fig. 2.13. On the left is a full k-space recon-struction. In the middle is a homodyne reconstruc-tion of 9/16ths of the data using a step weight-ing. Note the ghost of the scalp interfering withthe brain. Using a ramp weighting, shown on theright, effectively eliminates this artifact. However,it produces an additional artifact above the audi-tory canal, where the phase is changing rapidly asa function of space.
The homodyne algorithm is summarized inFig. 2.14. The central, symmetrically sampleddata is reconstructed as a low resolution image,ms(x, y). A phase correction image p∗(x, y) iscomputed as in Eq. 2.3. The partial k-space
18 CHAPTER 2. PARTIAL K-SPACE RECONSTRUCTION
Full k-Space Step Weighting Ramp Weighting
Figure 2.13: Comparison of the performance of different homodyne k-space weighting functions for a 9/16thsdata set. This is aggressive for phase gradients in this data set. On the left is the full k-space reconstruction. Inthe middle a step k-space weighting has been used. Note the distinct ghosts from the subcutaneous fat in thescalp (arrow). Using a ramp weighting, right, effectively eliminates this artifact. However, an additional artifactappears above the auditory canal, where the image phase is rapidly changing (arrow).
W(ky)
ky
(W(ky)+W*(-ky))/2
ky
(W(ky)-W*(-ky))/2
ky
Symmetric
Antisymmetric
2
Figure 2.12: Using a linear ramp weighting over thecentral symmetrically sampled strip in k-space reducesthe transients at the boundaries of the different k-spaceregions, and still produces a uniform k-space weightingfor what will be the real component of the image.
data is preweighted in the partial k-space direc-tion. The weighted partial k-space data is in-verse Fourier transformed to produce an imagempk(x, y)∗w(x, y). This is phase corrected by mul-
tiplying by p∗(x, y). The final image is obtained bytaking the real part of the result
mhd(x, y) = Re{p∗(x, y) (mpk(x, y) ∗ w(x, y))}(2.4)
Note that ideally, the weighting convolution andthe image domain phase correction should occurin the other order. If the image phase is varyingrapidly in space, phase correction at one pixel canresult in incomplete suppression of the tails of theimaginary component from a nearby pixel. Thiseffect is illustrated in Fig. 2.15. The signal fromtwo voxels separated by five voxels is plotted forthe case where both voxels are on resonance, andin phase, and for the case where the frequency dif-ference between the two voxels produces π/2 phaseshift. On resonance the two voxels are resolved asexpected. Off resonance, the tail of the quadra-ture component of one voxel interferes with the in-phase component of the other voxel. After phasecorrection, this interference remains. Hence, forthe homodyne algorithm to work well, the gradi-ent of the image phase must be small compared tothe length of the tails of the imaginary componentof the impulse response.

2.3. ITERATIVE PARTIAL K-SPACE RECONSTRUCTION 19
Initial partial k-spacedata set Mpk(kx,ky)
SymmetricData
Xp*(x,y)=exp(-i angle{ms(x,y)}
ms(x,y) mpk(x,y)*w(x,y)
m(x,y) Desired Image
X
Real part
Pre-WeightingFunction W(ky)
DFT-1 DFT-1
Figure 2.14: Summary of the homodyne algorithm.
2.2.4 Conjugate Synthesis by k-SpaceWeighting
In the phase correction conjugate synthesis algo-rithm, the unknown data is generated by copyingdata from the conjugate symmetric location in k-space. The boundary between the acquired dataand the synthesized data is a potential source ofartifacts. These can be reduced by using the samek-space weighting method as in the homodyne al-gorithm. Examples are shown in Fig. 2.16. Inthis case the k-space fraction has been increase to5/8ths of k-space because the algorithm didn’t pro-duce acceptable results at 9/16ths.
Voxel a
Voxel b
a+b
On Resonance p/2 Phase shift in 5 voxels
Voxel a
Voxel b
a+b
PhaseCorrected
Figure 2.15: A limitation of the homodyne algorithm.Two voxels are separated by five voxels. If both areon resonance, suppressing the imaginary component re-solves the two voxels as desired, shown on the left. Ifthe difference frequency between the two produces aπ/2 phase shift, the tails of quadrature component fromone voxel interferes with the in-phase component of theother voxel. Phase correction rotates both interferingcomponents into the real channel, producing artifacts.
2.2.5 Summary of Direct Methods
Both the homodyne algorithm, and the phase cor-rected conjugate synthesis approaches work wellif the rate of change of image phase is limited.The problems with the homodyne approach arethe result of performing phases correction afterconjugate synthesis. The problems with the phasecorrected conjugate synthesis approach are due toperforming the conjugate synthesis after the phasecorrection.
2.3 Iterative Partial k-Space Re-construction
The methods of the previous section performthe reconstruction in one pass. Problems arise

20 CHAPTER 2. PARTIAL K-SPACE RECONSTRUCTION
Full k-Space Step Weighting Ramp Weighting
Figure 2.16: Comparison of the performance of different k-space weighting functions for a 5/8ths data set,for a phase compensated conjugate synthesis reconstruction where the conjugate synthesis is done using thesame k-space weighting technique as is used in the homodyne reconstruction. On the left is the full k-spacereconstruction. In the middle a step k-space weighting has been used On the right a ramp has been used. Eachof these results in reasonable reconstructions. At 9/16ths ghosting is produced with either weighting function(not shown), similar to the step weighted homodyne example of Fig. 2.13.
from the interaction between phase correction andthe conjugate synthesis method, as was describedabove. Another approach is to estimate the miss-ing k-space data by iteratively applying phase cor-rection and conjugate synthesis. In the image do-main, the image phase is constrained to be that ofthe low resolution estimate. In the frequency do-main, the k-space data is constrained to match theacquired data when available. Iterating producesan estimate that approximately satisfies both setsof constraints.
There are several variations on this idea, depend-ing on how the constraints are applied, and howthe iteration is performed. We describe here asimple version of the POCS (for Projection ontoConvex Sets) algorithm [3]. It is closely related tothe earlier Cuppen algorithm [2].
The algorithm operates by iteratively transform-ing between the image domain and the spatialfrequency domain. In the spatial frequency do-main, the phase encodes that were actually ac-quired replace those of the current k-space esti-mate Mi(kx, ky). This updated data set is inverse
Fourier transformed to produce the new estimatedimage mi(x, y). The phase of this image is forcedto conform to the phase of the symmetrically ac-quired image ms(x, y) by computing
mi,pc = |mi(x, y)| p(x, y) (2.5)
wherep(x, y) = ei# ms(x,y) (2.6)
The corresponding Fourier data Mi,pc(kx, ky) iscomputed by Fourier transform, and the entriescorresponding to the uncollected phase are propa-gated forward to Mi+1(kx, ky). The output imageis mi(x, y) on the last iteration. The algorithm issummarized in Fig. 2.17. This is a complex image.Either the magnitude or the real part of the phasecorrected image Re{mi(x, y)p∗(x, y)} can be used.
Typically the algorithm converges very rapidly, re-quiring four to five iterations before the changesfrom one iteration to the next are an order of mag-nitude below the noise floor of the MRI data.
Examples of both POCS and homodyne recon-structions of the data set of Fig. 2.1 are shown

2.4. CONCLUSIONS 21
Initial partial k-spacedata set Mpk(kx,ky)
DFT-1
SymmetricData
Xp(x,y) = exp(i arg{ms(x,y)})
ms(x,y)
mi(x,y)
p(x,y)abs(mi(x,y))
Phase ConstrainedImage Data
DFT
Zero Matrix
abs(mi(x,y))
Replace DataReplace Data
Data Constrainedk-Space DataMi(kx,ky)
DFT-1
Figure 2.17: Summary of the POCS algorithm.
in Fig. 2.18, along with difference images com-puted with respect to the full k-space reconstruc-tion. With either method, at 5/8ths data sets,both methods perform well. At 9/16ths, the POCSreconstruction has fewer artifacts than the step-windowed (shown) or ramp windowed homodynereconstructions.
2.4 Conclusions
All of these algorithms work well for the case wherethe image phase variations are smooth. When theimage phase changes rapidly, the homodyne algo-rithm produces ghosting. The POCS algorithmperforms somewhat better as the k-space fractiondecreases.
2.5 References
1. D.C. Noll, D.G. Nishimura, and A. Macovski,IEEE Transactions on Medical Imag., MI-10(2), 154, (1991).
2. J. Cuppen and A. van Est, Magn. Reson.Imaging, 5, 526, (1987).
3. E.D. Lindskog, E.M. Haacke,and W. Lin, emJ. Magn Reson., 92,126 (1991).
4. Z.-P. Liang and P.C. LauterburPrinciples ofMagnetic Resonance Imaging: A Signal Pro-cessing Approach, , IEEE Press, 2000.
5. G. McGibney, M.R. Smith, S.T. Nichols, andA. Crawley, Magn. Reson. Med, 30(1), 51,(1993).

22 CHAPTER 2. PARTIAL K-SPACE RECONSTRUCTION
HD 5/8
HD 9/16
POCS 5/8
POCS 9/16
Image error*4
Figure 2.18: Comparison of partial k-space reconstructions of the axial head data of Fig. 2.1. The top twoare homodyne reconstructions at 9/16ths and 5/8ths k-space, and the lower two are POCS reconstructions forthe same k-space fractions. Difference images are computed relative to the full-k-space reconstructions. Thehomodyne reconstructions at 9/16ths has clear ghosting. The POCS reconstruction at the same k-space fractionproduces fewer artifacts. Either works well at 5/8ths.

2.5. REFERENCES 23
Phase Correct Full abs(PCF - Full)
Trivial PK abs(Triv - Full)
Homodyne abs(HD-PCF)
POCS abs(POCS-PCF)
Figure 2.19: Comparison of partial k-space reconstructions for a gradient recalled echo phantom data set with9/16ths k-space coverage. Here the homodyne algorithm and the POCS algorithm perform similarly. Both failin the vicinity of the “GE” logo, where the the phase compensation function p∗(x, y) doesn’t have the resolutionto track the rapid local changes in phase.

24 CHAPTER 2. PARTIAL K-SPACE RECONSTRUCTION