optimization using the nag library - institute of...
TRANSCRIPT
– 1 –
Optimization using the NAG Library
The Numerical Algorithms Group
www.nag.com
1. Introduction
The NAG Library [1] is a collection of functions which encapsulates hundreds of
algorithms in mathematics and statistics, and which can be invoked by developers to
(efficiently and accurately) solve numerical problems in their applications. The use of
such a resource is intended to free developers from the obligation of writing (or
finding, or testing) implementations of such algorithms themselves, thereby enabling
them to devote more effort to other aspects of their application.
One of the fields covered by the Library is optimization, and this note is devoted to
the description of some of the ways in which the Library can be used to solve
problems in this area. We begin with a brief discussion (§2.1) of mathematical
optimization, and the way in which some optimization problems include constraints
(§2.2) on the solution. Determining the form of the problem (including any
constraints) is important because, as we shall see in §2.3, it is essential to use a solver
which is appropriate for the type of problem at hand; we illustrate this point in §2.4
with a simple example. Section 3 describes some of the functionality of the NAG
Library optimization solvers; we draw a distinction between local solvers (§3.1) and
global solvers (§3.2), before highlighting, in §3.3, the routines which have been added
to the Library in its latest release. We conclude §3 by looking at some related
problems which can be solved using routines from other chapters of the Library. Our
attention turns to applications of optimization in Section 4, which involves briefly
surveying (§4.1) a few examples from finance, manufacturing and business analytics
in which NAG solvers have been used before describing (§4.2) a specific financial
analysis application in more detail. A final section (§5) contains the conclusions of
this note.

– 2 –
2. Background
2.1 What is optimization?
Optimization is a wide-ranging and technically detailed subject, to which several
authoritative texts – for example, [2] [3] – have been devoted. It can be defined as
“the selection of a best element (with regard to some criteria) from some set of
available alternatives” [4]. Mathematically, it consists of locating the maximum or
minimum of a function of variables (called the objective function):
( )
( )
( )
(1)
That is, we seek the values for which correspond to a maximum or
minimum value for . Since maximizing ( ) is equivalent to minimizing the
negative of ( ), we can without loss of generality consider minimization only from
hereon.
A distinction may immediately be drawn between finding a local minimum –
where, for all near , ( ) ( ) – and a global minimum, where this condition
is fulfilled for all . We note that there is a large class of optimization problems [5]
which have at most one local minimum – that is, there is no difference between the
two types of minimum. Whilst many algorithms have been developed for local
optimization, the development of reliable methods for global optimization (especially
for large-scale problems) has been harder to do. It should also be noted that
circumstances often arise where the determination of a local minimum is sufficient for
the user – for example, for problems in which application of global optimization
methods are intractable, or less reliable than local methods, or if the user possesses
other information about a desired local minimum.
Methods for optimization often require information related to the derivatives of the
objective function, in order to assist with the search for the minimum. More
specifically, the elements of the gradient vector (the vector of first derivatives of
with respect to each of the ) and the Hessian matrix (the square matrix of second
derivatives of ) are defined as:

– 3 –
( )
( )
(2)
A simple illustration of the use of derivatives in optimization can be found in §2.3, in
the description of the so-called steepest descent method, which uses explicitly – see
equation (10).
2.2 Constraining the problem
Many optimization problems are unconstrained – that is, there are no restrictions on
the values that the solution vector may take. Other problems are supplemented by
such restrictions – for example, in a demographic study, a population cannot be
negative. These are usually specified by a set of constraint functions, for example:
(3)
which are bound constraints, or
(4)
which is an example of a linear constraint, or
(5)
which is a non-linear constraint. The three types of constraint can be expressed
succinctly as
{
( )
} (6)
in which and are vectors of lower and upper bound values, is a constant matrix,
and is a vector of nonlinear constraint functions.

– 4 –
2.3 Using the appropriate solver
A single, all-purpose optimization method does not currently exist. Instead, different
methods have been developed (and which are offered by NAG) that are suitable for
particular forms of optimization problem. Using a method that is inappropriate for the
problem at hand can be cumbersome and/or inefficient and, whilst it is always
possible to use a method which is more generic than necessary, it will usually be
massively outperformed by specialized solvers which are aimed at specific forms of
problem.
The form of the optimization problem is determined by the properties of the objective
function, and by the form of the constraints (if any). More specifically, a distinction
is made between objective functions that are linear, quadratic and nonlinear.
Another distinction may be made if the objective function can be written as
( ) ∑
( ) (7)
in which case the optimization is referred to as a least squares problem (which may be
further classified as nonlinear or linear, depending on the form of the functions ).
Some specific combinations of the properties of the objective function and the
constraints receive special designation; thus, linear constraints together with a linear
is referred to as a linear programming (LP) problem; linear constraints plus a
quadratic makes a quadratic programming (QP) problem, whilst any type of
constraints with a nonlinear is called a nonlinear programming (NLP) problem.
2.4 An example problem
We illustrate the way in which different solution methods can perform in different
ways for the same problem in Figure 1, which shows two attempts to find the
minimum of the so-called Rosenbrock function [6]:
( ) ( ) (
) (8)
This is a function which was designed as a performance test for optimization
algorithms. It has a global minimum at

– 5 –
( ) (9)
which is within a long, narrow, parabolic-shaped flat valley. The two methods used in
Figure 1 to minimize (8) are called steepest (or gradient) descent [7], and a sequential
quadratic programming (SQP) method [3], as implemented in the NAG Library [8].
The former is easier to understand (and program) than the latter: specifically, at each
point, the method takes a step in the direction of the negative gradient at that point:
( ) ( ) ( ) ( ( )) (10)
where ( ), the step size at the -th step, is proportional to | ( ( ))|, the modulus of
Figure 1. Finding the minimum of Rosenbrock's function in
MATLAB® using the method of steepest descent (top) and a method
from the NAG Library (bottom).
– 6 –
the gradient at that step. Figure 1 shows that, whilst this method is able to find the
location of the valley in a few big steps, its progress along the valley takes many more
small steps, because of the link between the size of the step and the gradient. The
method terminates after 400 steps in this example, with the current step still being a
long way away from the minimum. By contrast, the SQP method converges to the
minimum in 55 steps. (The number of steps taken by an optimization method should
be as small as possible for efficiency’s sake, because it is proportional to the number
of times the objective function is evaluated, which can be computationally expensive.)
We recall that many optimization methods require information about the objective
function’s derivatives. The NAG implementation of the SQP method has an option
for these to be specified explicitly (in the same way that the form of the objective
function is described); otherwise, it approximates the derivatives using finite
difference methods1. This clearly requires many more evaluations of the objective
function – to be specific, in this example, it increases the number of steps required for
convergence to 280.
Similar conclusions about efficiency and the provision of derivative information could
be reached by examining the performance for the solution of a given problem of – for
example – three NAG implementations of a modified Newton method [9]; one which
uses function values only [10], one which also uses first derivatives [11], and one
which also uses first and second derivatives [12].
Finally in this section, we note that the Rosenbrock function (8) can be written in the
form of (7), which turns its minimization into a non-linear least squares problem:
( ) ( )
( )
( ) ( )
( ) ( )
(11)
Switching to a quasi-Newton method [13] which is specially designed for this type of
problem – implemented in the NAG Library at [14] – results in a convergence to the
1 Other NAG functions bypass the requirement for gradients by using specialized optimization methods
such as BOBYQA [26] or Nelder-Mead [28] which do not require derivatives to determine the next
step in the optimization sequence – see §3.3, below.
– 7 –
minimum in 19 steps (which, since this method requires specification of derivatives,
is to be compared with the 55 steps required by the more general SQP method when
derivatives are provided).
3. Optimization and the NAG Library
In this section we look at the range of functionality and applicability that the NAG
Library offers for optimization problems. We consider both local (§3.1) and global
(§3.2) optimization and, whilst we do not for the most part discuss individual routines
in detail, describe in §3.3 the enhancements in optimization functionality which have
been included [15] in the most recent release (Mark 23) of the NAG Library. Finally
in this section, we mention (§3.4) a few optimization problems that can be solved
using functions from non-optimization chapters in the Library.
We note in passing that the functions in the Library can be accessed from a variety of
computing environments and languages [16] including MATLAB and Microsoft
Excel (see figures 1-3 for examples). In addition, some work has been recently done
[17] to build interfaces between NAG solvers and AMPL, a specialized language
which is used for describing optimization problems. Interfaces to two NAG solvers
are described in detail (and are available for download from the NAG website), which
provides a useful starting point for the development of AMPL interfaces to other
routines, and the construction of mechanisms for calling NAG routines from other
optimization environments.
3.1 Local optimization
The NAG Library contains a number of routines for the local optimization of linear,
quadratic or nonlinear objective functions; of objective functions that are sums of
squares of linear or nonlinear functions; subject to bounded, linear, sparse linear,
nonlinear or no constraints. The documentation of the local optimization chapter [18]
describes how to choose the most appropriate routine for the problem at hand with the
help of a decision tree which incorporates questions such as:
What kind of constraints does the problem have?
o None
o Bound
o Linear
– 8 –
If so, is the matrix of linear constraints [see (6)] sparse?
o Nonlinear
What kind of form does the objective function have?
o Linear
o Quadratic
o Sum of squares
o Nonlinear
Does the objective function have one variable?
Are first derivatives available?
o If so, are second derivatives available?
Is computational cost critical?
Is storage critical?
Are you an experienced user?
The last question is related to the fact that many of the optimization methods are
implemented in two routines: namely, a comprehensive form and an easy-to-use form.
The latter are more appropriate for less experienced users, since they include only
those parameters which are essential to the definition of the problem (as opposed to
parameters relevant to the solution method). The comprehensive routines use
additional parameters which allow the user to improve the method’s efficiency by
‘tuning’ it to a particular problem.
3.2 Global optimization
The Library contains implementations of three methods for the solution of global
optimization problems. As previously (§3.1), the documentation for this chapter [19]
provides the user with suggestions about the choice of the most appropriate routine for
the problem at hand.
nag_glopt_bnd_mcs_solve [20] uses a multilevel coordinate search
[21] which recursively splits the search space (i.e. that within which the
minimum is being sought) into smaller subspaces in a non-uniform fashion.
The problem may be unconstrained, or subject to bound constraints. The
routine does not require derivative information, but the objective function
must be continuous in the neighbourhood of the minimum, otherwise the
method is not guaranteed to converge. The use of this routine is illustrated in

– 9 –
Figure 2, the upper part of which shows a demo function having more than one
minimum2. The workings of the method are shown in the bottom part of the
2 More specifically, this is MATLAB’s peaks function.
Figure 2. Globally optimizing a function with more than one minimum (displayed as
a surface at top) using a method from the NAG Library (bottom).
– 10 –
figure, which displays the function as a contour plot, along with the search
subspaces and objective function evaluation points chosen by the method; it
can be seen that – for this example – the method spends most of its time in and
around the two minima, before correctly identifying the global minimum as
the lower of the two.
nag_glopt_nlp_pso [22] uses a stochastic method based on particle
swarm optimization [23] to search for the global minimum of the objective
function. The problem may be unconstrained, or subject to bound, or linear, or
nonlinear constraints (there also exists a simpler variant [24] of the routine
which only handles bound – or no – constraints). The routine does not require
derivative information, although this could be used by the optional
accompanying local optimizers. A particular feature of this routine is that it
can exploit parallel hardware, since it allows multiple threads to advance
subiterations of the algorithm in an asynchronous fashion.
nag_glopt_nlp_multistart_sqp [25] finds the global minimum of an
arbitrary smooth function subject to constraints (which may include simple
bounds on the variables, linear constraints and smooth nonlinear constraints)
by generating a number of different starting points and performing a local
search from each using SQP. This method can also exploit parallel hardware,
in the same fashion as the particle swarm method.
3.3 Recent additions to NAG Library optimization functionality
Two of the global optimization routines described in §3.2 (specifically,
nag_glopt_nlp_pso and nag_glopt_nlp_multistart_sqp) are new in
the most recent release of the NAG Library. In addition, the following local
optimization routines were also added to the Library at that release:
nag_opt_bounds_qa_no_deriv [26] is an easy-to-use routine that uses
methods of quadratic approximation to find a local minimum of an objective
function ( ), subject to bound constraints on the . It is useful for problems
where the computation of derivatives of is either impossible or numerically
intractable – for example, if is the result of a simulation. The routine uses
the BOBYQA (Bound Optimization BY Quadratic Approximation) algorithm

– 11 –
[27] whose efficiency is preserved for large problem sizes3. For example, it
solves the problem of distributing 50 points on a sphere to have maximal
pairwise separation (starting from equally spaced points on the equator) using
4633 evaluations of . This is to be compared with, for example, the NAG
routine [28] which uses the so-called Nelder-Mead simplex solver [29] and
takes 16757 evaluations.
nag_opt_nlp_revcomm [30] is designed to locally minimize an arbitrary
smooth function subject to constraints (which may include simple bounds,
linear constraints and smooth nonlinear constraints) using an SQP method.
The user should supply as many first derivatives as possible; any unspecified
derivatives are approximated by finite differences. It may also be used for
unconstrained, bound-constrained and linearly-constrained optimization. It
uses a similar algorithm to nag_opt_nlp [31], but has an alternative
interface4.
3.4 Solving optimization problems using other NAG routines
In addition to the standard types of optimization problem which the routines from the
two optimization chapters [18] [19] can be used to solve, there are a few related
problems that can be solved using functions in other chapters of the NAG Library.
For example, there are several routines in the Least Squares and Eigenvalue Problems
chapter of the Library [32] which perform the minimization of
( ) ∑ ( )
(12)
where the residual is defined as
3 i.e., large in equation (1).
4 Specifically, it uses so-called reverse communication [55], as opposed to forward communication
which requires that user-supplied procedures – such as that which calculates ( ) – be included in the
function argument list, so that they can be called from the routine. Opting for the reverse
communication interface – which is used in many NAG Library routines – is helpful when it is
impractical or inconvenient to pass user’s data into callback routines, or when interfacing with
complicated environments.
– 12 –
( ) ∑
(13)
In a similar fashion, the minimization of other metrics – for example the so-called
norm [33]
( ) ∑| ( )|
(14)
or the norm,
( )
| ( )| (15)
can be solved5 using routines from the curve and surface fitting chapter of the Library.
Finally in this section, we mention a NAG routine [34] which solves various types of
integer programming problem. Briefly, these are LP and QP problems – possibly
incorporating linear constraints (6) – where some (or all) of the elements of the
solution vector are restricted to taking either only integer values, or only zero or
one. The routine uses a branch and bound method that divides the problem up into
sub-problems, each of which is solved internally using a QP solver from the local
optimization chapter [35].
4. Applications
Optimization is a technique which has been used in the solution of many problems
from a wide variety of domains. These range [4] from engineering (rigid body
dynamics, design optimization, control engineering) and operations research
(scheduling, routing, critical path analysis) to economics (expenditure minimization
problems and trade theory). Solutions to other – more abstract – optimization
problems, such as mesh smoothing, shape optimization or particle steering can be
useful in multiple domains.
A complete review of optimization applications is beyond the scope of this section;
instead we first describe (§4.1) a few examples of interest where NAG optimization
routines have been used, before focusing (§4.2) on a simple problem taken from
finance – namely, portfolio optimization – and presenting a reasonably detailed
5 nag_lone_fit [57] for the norm, or nag_linf_fit [56] for the norm.

– 13 –
description of the way in which NAG functions can be used to solve it; this also
serves to highlight how they can be invoked from within various environments by
users with little or no programming knowledge.
We note in passing that use of the NAG Library for portfolio optimization has
previously been discussed elsewhere [36]. Our account in §4.2 is less comprehensive,
but takes more recent developments – including the Library interfaces with MATLAB
and Microsoft Excel, and the treatment of the nearest correlation matrix [37] – into
account. The interested reader is referred to [36] for a more detailed and authoritative
account of this subject.
4.1 Optimization examples using NAG
Examples of applications which use NAG routines for optimization include index
tracking [38]. This problem – which is related to portfolio optimization (§4.2) – aims
to replicate the movements of the index of a particular financial market, regardless of
changes in market conditions, and can also be tackled using optimization methods. In
fact, the same NAG method [39] that is used for the portfolio optimization problem
can also be used here.
Optimization is also heavily used in the calibration of derivative pricing models [40],
in which values for the parameters of the model are calculated by determining the best
match between the results of the model and historical prices (known as the calibration
instruments). This can be expressed as the minimization of, for example, the chi-
squared metric:
∑
( ) (16)
i.e., the weighted sum, over the instruments in the calibration set, of the difference
between the market price of instrument and its price ( ) as predicted by the
model for some set of parameters . The weight is used to reflect the confidence
with which the market price for is known. As noted above (§3.4), it is also possible
to use other metrics – such as the (weighted) and norms – here. The
optimization problem is then how to determine the which minimizes the metric.
Other users [41] have optimized the performance of power stations by developing
mathematical models of engineering processes, and using NAG optimization routines
– 14 –
to solve them. The same routines have also found application in the solution of shape
optimization problems in manufacturing and engineering [42].
In the field of business analytics, NAG optimization routines have been used [43] in
the development of applications to help customers with – for example – fitting to a
pricing model used in the planning of promotions, and maximizing product income by
combining its specification, distribution channel and promotional tactics.
Other applications include the use of optimization for parameter estimation in the
fitting of statistical models to observed data [44].
4.2 Portfolio optimization
Portfolio optimization addresses the question of diversification – that is, how to
combine different assets in a portfolio which achieves maximum return with minimal
risk. This problem was initially addressed by Markowitz [45]; we outline its
treatment here.
We assume that the portfolio contains assets, each of which has a return . Then,
the return from the portfolio is
( ) ∑
(17)
where is the proportion of the portfolio invested in asset . We further assume that
each is normally distributed with mean and variance ; the vector of returns
then has ( ) distribution, with the vector of means and the covariance
matrix. These can be, for example, calculated from historical data:
∑ ( )
∑ ( ) ( )
(18)
for a collection of observations of at times (we note in passing that the NAG
Library contains a routine [46] for calculating and , as well as other statistical
data).
The expectation and variance of the portfolio return are

– 15 –
( ) ∑
( ) ∑∑
(19)
The portfolio optimization problem is then to determine the which results in a
specific return , with minimum risk. We define the latter as the variance of the
return – see (19). The objective function is then ( ) – i.e., the optimization
problem can then be stated as
(20)
with the constraint
∑
(21)
This problem can be solved using a QP method [47], as implemented in the NAG
Library at [39]. The problem may incorporate constraints – for example, that the
whole portfolio be fully invested:
∑
(22)
In addition, the composition of the portfolio may be constrained across financial
sectors. For example, the requirement that up to 20% be invested in commodities, and
at least 10% in emerging markets may be specified as
∑
∑
(23)
where each element of the coefficient vectors and is either 0 or 1, depending on
the classification of asset . Other types of linear constraints might capture the
– 16 –
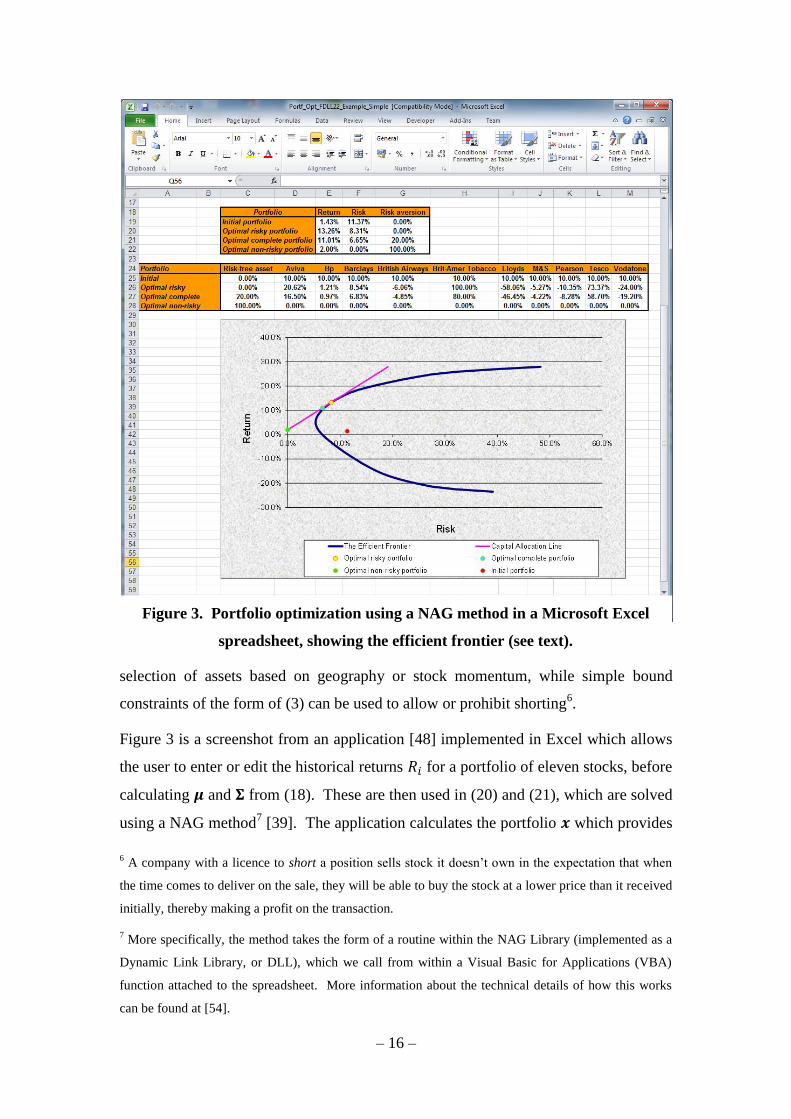
selection of assets based on geography or stock momentum, while simple bound
constraints of the form of (3) can be used to allow or prohibit shorting6.
Figure 3 is a screenshot from an application [48] implemented in Excel which allows
the user to enter or edit the historical returns for a portfolio of eleven stocks, before
calculating and from (18). These are then used in (20) and (21), which are solved
using a NAG method7 [39]. The application calculates the portfolio which provides
6 A company with a licence to short a position sells stock it doesn’t own in the expectation that when
the time comes to deliver on the sale, they will be able to buy the stock at a lower price than it received
initially, thereby making a profit on the transaction.
7 More specifically, the method takes the form of a routine within the NAG Library (implemented as a
Dynamic Link Library, or DLL), which we call from within a Visual Basic for Applications (VBA)
function attached to the spreadsheet. More information about the technical details of how this works
can be found at [54].
Figure 3. Portfolio optimization using a NAG method in a Microsoft Excel
spreadsheet, showing the efficient frontier (see text).

– 17 –
a return (entered by the user), at minimum risk. It also calculates the so-called
efficient frontier [49], which shows the highest expected return for each level of risk.
The simplicity of this portfolio model is helpful for the purposes of explication and
the construction of a demo application but, as is well-known [45], it suffers from a
number of drawbacks that impede its application to real-world problems. For
example, the assumption that the returns are normally distributed is not borne out in
practice, nor is it the case that correlations between assets do not change in time8. It
also assumes that over-performance (a return greater than ) is to be eschewed in the
same way as under-performance; such an equal weighting clearly does not correspond
to the desires of real investors. In practice, quantitative analysts use models that are
more sophisticated than that described here – see, for example, the work described in
[50] – which in turn require the use of a more general optimizer from the NAG
Library.
Before leaving this subject, we mention a related area where NAG methods are
proving helpful. The treatment above – and also that of more sophisticated models –
requires that the matrix is positive semi-definite – i.e., that the quantity is non-
negative for all (this is part of the definition of a covariance matrix, and is a
requirement for the optimizer to work). In practice, this is often not the case, since
is calculated from historical data [see (18)], which might be incomplete, thus
rendering invalid for use here. A method which determines , the nearest positive
semi-definite matrix to , by minimizing their Frobenius separation has been recently
developed [51] [52], and has been implemented in the NAG Library [37]. Having
calculated in this fashion, it can then be used in (20) in place of .
5. Conclusions
In this note, we have examined some characteristics of optimization problems,
including their categorization, and the importance of using an appropriate solver for
the type of problem at hand. In this context, we have described some of the solvers
which can be found in the optimization chapters of the NAG Library, together with
other NAG routines that can be applied to the solution of optimization problems. We
8 For example, during a financial crisis, all assets tend to become positively correlated, because they all
move in the same direction (i.e. down).
– 18 –
have also briefly reviewed a few example applications which have incorporated the
use of NAG solvers.
Readers who are interested in finding out more about NAG’s optimization
functionality, or who require advice on its application to specific problems, are
encouraged to contact our optimization specialists via the NAG helpdesk.
Finally, it should perhaps be mentioned that, along with the routines that have been
mentioned in this note, the NAG Library [1] contains user-callable routines for
treatment of a wide variety of numerical and statistical problems, including – for
example – linear algebra, statistical analysis, quadrature, correlation and regression
analysis and random number generation.
6. Acknowledgements
We thank Jeremy Walton for writing this note and other colleagues David Sayers,
Martyn Byng, Jan Fiala, Marcin Krzysztofik and Mick Pont for many helpful
technical discussions during preparation.
7. Bibliography
1. Numerical Algorithms Group. NAG numerical components. [Online]
http://www.nag.com/numeric/numerical_libraries.asp.
2. Gill, P.E. and Murray, W., [ed.]. Numerical Methods for Constrained
Optimization. London : Academic Press, 1974.
3. Fletcher, R. Practical Methods of Optimization. 2nd edn. Chichester : Wiley, 1987.
4. Wikipedia. Mathematical optimization. [Online]
http://en.wikipedia.org/wiki/Mathematical_optimization.
5. —. Convex optimization. [Online]
http://en.wikipedia.org/wiki/Convex_optimization.
6. —. Rosenbrock function. [Online]
http://en.wikipedia.org/wiki/Rosenbrock_function.
7. —. Gradient descent. [Online] http://en.wikipedia.org/wiki/Gradient_descent.
8. Numerical Algorithms Group. nag_opt_nlp_solve (e04wd) routine document.
[Online] http://www.nag.co.uk/numeric/CL/nagdoc_cl23/pdf/E04/e04wdc.pdf.
– 19 –
9. Gill, P.E. and Murray, W. Minimization subject to bounds on the variables.
National Physical Laboratory. 1976. NPL Report NAC 72.
10. Numerical Algorithms Group. nagf_opt_bounds_quasi_func_easy (e04jy)
routine document. [Online]
http://www.nag.co.uk/numeric/fl/nagdoc_fl23/pdf/E04/e04jyf.pdf.
11. —. nagf_opt_bounds_quasi_deriv_easy (e04ky) routine document. [Online]
http://www.nag.co.uk/numeric/fl/nagdoc_fl23/pdf/E04/e04kyf.pdf.
12. —. nagf_opt_bounds_mod_deriv2_easy (e04ly) routine document. [Online]
http://www.nag.co.uk/numeric/fl/nagdoc_fl23/pdf/E04/e04lyf.pdf.
13. Algorithms for the solution of the nonlinear least-squares problem. Gill, P.E. and
Murray, W. 1978, SIAM J. Numer. Anal., Vol. 15, pp. 977-992.
14. Numerical Algorithms Group. nag_opt_lsq_deriv (e04gb) routine document.
[Online] http://www.nag.co.uk/numeric/CL/nagdoc_cl23/pdf/E04/e04gbc.pdf.
15. —. NAG C Library News, Mark 23. [Online]
http://www.nag.co.uk/numeric/CL/nagdoc_cl23/pdf/GENINT/news.pdf.
16. —. Languages and Environments. [Online] http://www.nag.co.uk/languages-and-
environments.
17. Fiala, Jan. Nonlinear Optimization Made Easier with the AMPL Modelling
Language and NAG Solvers. [Online]
http://www.nag.co.uk/NAGNews/NAGNews_Issue95.asp#Article1.
18. Numerical Algorithms Group. NAG Chapter Introduction: e04 - Minimizing or
Maximizing a Function. [Online]
http://www.nag.co.uk/numeric/CL/nagdoc_cl23/pdf/E04/e04intro.pdf.
19. —. NAG Chapter Introduction: e05 - Global Optimization of a Function . [Online]
http://www.nag.co.uk/numeric/CL/nagdoc_cl23/html/E05/e05intro.html.
20. —. nag_glopt_bnd_mcs_solve (e05jb) routine document. [Online]
http://www.nag.co.uk/numeric/CL/nagdoc_cl23/pdf/E05/e05jbc.pdf.
21. Global optimization by multi-level coordinate search. Huyer, W. and Neumaier,
A. 1999, Journal of Global Optimization, Vol. 14, pp. 331-355.
– 20 –
22. Numerical Algorithms Group. nag_glopt_nlp_pso (e05sb) routine document.
[Online] http://www.nag.co.uk/numeric/CL/nagdoc_cl23/pdf/E05/e05sbc.pdf.
23. Vaz, A.I. and Vicente, L.N. A Particle Swarm Pattern Search Method for Bound
Constrained Global Optimization. Journal of Global Optimization. Vol. 39, 2, pp.
197-219.
24. Numerical Algorithms Group. nag_glopt_bnd_pso (e05sa) routine document.
[Online] http://www.nag.co.uk/numeric/CL/nagdoc_cl23/pdf/E05/e05sac.pdf.
25. —. nag_glopt_nlp_multistart_sqp (e05uc) routine document. [Online]
http://www.nag.co.uk/numeric/CL/nagdoc_cl23/html/E05/e05ucc.html.
26. —. nag_opt_bounds_qa_no_deriv (e04jc) function document. [Online]
http://www.nag.co.uk/numeric/CL/nagdoc_cl23/pdf/E04/e04jcc.pdf.
27. Powell, M.J.D. The BOBYQA algorithm for bound constrained optimization
without derivatives. University of Cambridge. 2009. Report DAMTP 2009/NA06.
28. Numerical Algorithms Group. nag_opt_simplex_easy (e04cb) function
document. [Online]
http://www.nag.co.uk/numeric/CL/nagdoc_cl23/pdf/E04/e04cbc.pdf.
29. A simplex method for function minimization. Nelder, J.A. and Mead, R. 1965,
Comput. J., Vol. 7, pp. 308–313.
30. Numerical Algorithms Group. nag_opt_nlp_revcomm (e04uf) function
document. [Online]
http://www.nag.co.uk/numeric/CL/nagdoc_cl23/pdf/E04/e04ufc.pdf.
31. —. nag_opt_nlp (e04uc) function document. [Online]
http://www.nag.co.uk/numeric/CL/nagdoc_cl23/pdf/E04/e04ucc.pdf.
32. —. NAG chapter introduction - f08: Least Squares and Eigenvalue Problems.
[Online] http://www.nag.co.uk/numeric/CL/nagdoc_cl23/pdf/F08/f08intro.pdf.
33. Wikipedia. Norm (mathematics). [Online]
http://en.wikipedia.org/wiki/Norm_(mathematics).
34. Numerical Algorithms Group. nag_ip_bb (h02bb) routine document. [Online]
http://www.nag.co.uk/numeric/CL/nagdoc_cl23/pdf/H/h02bbc.pdf.

– 21 –
35. —. nag_opt_qp (e04nf) routine document. [Online]
http://www.nag.co.uk/numeric/CL/nagdoc_cl23/pdf/E04/e04nfc.pdf.
36. Fernando, K.V. Practical Portfolio Optimization. [Online]
http://www.nag.co.uk/doc/techrep/index.html#np3484.
37. Numerical Algorithms Group. nag_nearest_correlation (g02aa) routine
document. [Online]
http://www.nag.co.uk/numeric/CL/nagdoc_cl23/pdf/G02/g02aac.pdf.
38. Wikipedia. Index fund. [Online] http://en.wikipedia.org/wiki/Index_fund.
39. Numerical Algorithms Group. nag_opt_lin_lsq (e04nc) routine document.
[Online] http://www.nag.co.uk/numeric/CL/nagdoc_cl23/pdf/E04/e04ncc.pdf.
40. Wikipedia. Derivative pricing. [Online]
http://en.wikipedia.org/wiki/Mathematical_finance.
41. Numerical Algorithms Group. PowerGen optimises power plant performance
using NAG's Algorithms. [Online]
http://www.nag.co.uk/Market/articles/NLCS213.asp.
42. Stebel, J. Test of numerical minimization package for the shape optimization of a
paper making machine header. [Online]
http://www.nag.co.uk/IndustryArticles/janstebel.pdf.
43. Walton, Jeremy, Fiala, Jan and Kubat, Ken. Case Study: Optimization for a
client with large-scale constrained problems. [Online]
http://www.nag.co.uk/Market/optimization_large-scale_constrained_problems.pdf.
44. Morgan, Geoff. The Use of NAG Optimisation Routines for Parameter
Estimation. [Online]
http://www.nag.co.uk/IndustryArticles/OptimisationParameterEstimation.pdf.
45. Wikipedia. Modern Portfolio Theory. [Online]
http://en.wikipedia.org/wiki/Portfolio_theory.
46. Numerical Algorithms Group. nag_corr_cov (g02bx) routine document.
[Online] http://www.nag.co.uk/numeric/CL/nagdoc_cl23/pdf/G02/g02bxc.pdf.
47. Gill, P.E., et al. Users’ guide for LSSOL (Version 1.0) Report SOL 86-1.
Department of Operations Research, Stanford University. 1986.
– 22 –
48. Numerical Algorithms Group. Demo Excel spreadsheet using NAG method to
solve portfolio optimization problem. [Online]
http://www.nag.co.uk/numeric/NAGExcelExamples/Portf_Opt_Simple_demo_FLDL
L.xls.
49. Wikipedia. Efficient Frontier. [Online]
http://en.wikipedia.org/wiki/Efficient_frontier.
50. Numerical Algorithms Group. Morningstar use NAG Library routines to assist
portfolio construction and optimization. [Online]
http://www.nag.co.uk/Market/articles/morningstar.pdf.
51. A quadratically convergent Newton method for computing the nearest correlation
matrix. Qi, J. and Sun, D. 2, 2006, SIAM J. Matrix Anal. Appl., Vol. 29, pp. 360-
385.
52. A preconditioned (Newton) algorithm for the nearest correlation matrix.
Borsdorf, R. and Higham, N.J. 1, 2010, IMA Journal of Numerical Analysis, Vol.
30, pp. 94-107.
53. SNOPT: An SQP Algorithm for Large-scale Constrained Optimization. Gill, P.E.,
Murray, W. and Saunders, M.A. 2002, SIAM J. Optim., Vol. 12, pp. 979-1006.
54. Krzysztofik, Marcin and Walton, Jeremy. Using the NAG Library to calculate
financial option prices in Excel. [Online]
http://www.nag.co.uk/IndustryArticles/NAGOptionPricingExcel.pdf.
55. Krzysztofik, Marcin. Reverse Communication in the NAG Library explained.
[Online] http://www.nag.co.uk/NAGNews/NAGNews_Issue95.asp#Article2.
56. Numerical Algorithms Group. nag_linf_fit (e02gc) routine document. [Online]
http://www.nag.co.uk/numeric/CL/nagdoc_cl23/pdf/E02/e02gcc.pdf.
57. —. nag_lone_fit (e02ga) routine document. [Online]
http://www.nag.co.uk/numeric/CL/nagdoc_cl23/pdf/E02/e02gac.pdf.
58. —. nag_opt_nlp_sparse (e04ug) routine document. [Online]
http://www.nag.co.uk/numeric/CL/nagdoc_cl23/pdf/E04/e04ugc.pdf.