operational space dynamics-exp-2021
TRANSCRIPT

1
CS225A
Experimental Robotics
Lecture 4
Oussama Khatib
Summary Kinematics
1
2

2
Joint to Operational Space Relationships
𝐽 𝑞 𝐸 𝑥 𝐽 𝑞
𝐽# 𝑞 𝐽# 𝑞 𝐸 𝑥𝛿𝑞 𝐽# 𝑞
𝛿𝑥𝛿𝜙
𝛿𝑥𝛿𝜙 𝐽 𝑞 𝛿𝑞𝛿𝑥 𝐸 𝑥
𝛿𝑥𝛿𝜙
Task Representation
Forward Relationships
Inverse Relationships 𝛿𝑥𝛿𝜙 𝐸 𝑥 𝛿𝑥
𝑥 Operational point 𝐽 𝑞 Representation specific task Jacobian
𝑥 Op. point orientation in task space 𝐽 𝑞 Basic (rep. ind.) task Jacobian
𝛿𝑥 Change in op. point config. 𝐽# 𝑞 Generalized Inverse of 𝐽
𝛿𝑥 Change in cartesian point position 𝐽# 𝑞 Generalized Inverse of 𝐽
𝛿𝜙 Instantaneous angular error 𝐸 𝑥 Transforms Basic Jacobian to Task Specific Jacobian
𝛿𝑞 Change in joint value 𝐸 𝑥 Inverse of the 𝐸 matrix
( )v
x E x
0
vJ q
P
R
xx
x
Position Representations
Representation 𝑬𝑷 Matrix 𝑬𝑷𝟏 Matrix
Cartesian 𝒙,𝒚, 𝒛1 0 00 1 00 0 1
1 0 00 1 00 0 1
Cylindrical 𝝆,𝜽, 𝒛
𝑐𝑜𝑠 𝜃 𝑠𝑖𝑛 𝜃 0𝑠𝑖𝑛 𝜃
𝜌𝑐𝑜𝑠 𝜃
𝜌 00 0 1
𝑐𝑜𝑠 𝜃 𝜌 𝑠𝑖𝑛 𝜃 0𝑠𝑖𝑛 𝜃 𝜌 𝑐𝑜𝑠 𝜃 0
0 0 1
Spherical 𝝆,𝜽,𝝓
𝑐𝑜𝑠 𝜃 𝑠𝑖𝑛 𝜙 𝑠𝑖𝑛 𝜃 𝑠𝑖𝑛 𝜙 cos 𝜙sin 𝜃
𝜌sin 𝜙𝑐𝑜𝑠 𝜃
𝜌sin 𝜙 0
𝑐𝑜𝑠 𝜃 𝑐𝑜𝑠 𝜙𝜌
𝑠𝑖𝑛 𝜃 𝑐𝑜𝑠 𝜙𝜌
𝑠𝑖𝑛 𝜙𝜌
𝑐𝑜𝑠 𝜃 𝑠𝑖𝑛 𝜙 𝜌 𝑠𝑖𝑛 𝜃 𝑠𝑖𝑛 𝜙 𝜌 𝑐𝑜𝑠 𝜃 𝑐𝑜𝑠 𝜙𝑠𝑖𝑛 𝜃 𝑠𝑖𝑛 𝜙 𝜌 𝑐𝑜𝑠 𝜃 𝑠𝑖𝑛 𝜙 𝜌 𝑠𝑖𝑛 𝜃 𝑐𝑜𝑠 𝜙𝑐𝑜𝑠 𝜙 0 1 𝜌 𝑠𝑖𝑛 𝜙
3
4

3
Orientation Representations
Rep. 𝑬𝑹 Matrix 𝑬𝑹𝟏 Matrix 𝜹𝝓 𝑬𝑹 𝒙𝑹 𝜹𝒙𝑹
Direction Cosines
𝒙𝒓 𝒓𝟏𝑻, 𝒓𝟐
𝑻, 𝒓𝟑𝑻 𝑻
�̂��̂��̂�
�̂��̂��̂�
12�̂� 𝑟 �̂� 𝑟 �̂� 𝑟
Euler Angles𝒙𝒓 𝝍,𝜽,𝝓
𝑠𝑖𝑛 𝜓 𝑐𝑜𝑠 𝜃𝑠𝑖𝑛 𝜃
𝑐𝑜𝑠 𝜓 𝑐𝑜𝑠 𝜃𝑠𝑖𝑛 𝜃 1
𝑐𝑜𝑠 𝜓 𝑠𝑖𝑛 𝜓 0𝑠𝑖𝑛 𝜓
𝑠𝑖𝑛 𝜃𝑠𝑖𝑛 𝜓
𝑠𝑖𝑛 𝜃 0
0 𝑐𝑜𝑠 𝜓 𝑠𝑖𝑛 𝜓 𝑠𝑖𝑛 𝜃0 𝑠𝑖𝑛 𝜓 𝑐𝑜𝑠 𝜓 𝑠𝑖𝑛 𝜃1 0 𝑐𝑜𝑠 𝜃
0 𝑐𝑜𝑠 𝜓 𝑠𝑖𝑛 𝜓 𝑠𝑖𝑛 𝜃0 𝑠𝑖𝑛 𝜓 𝑐𝑜𝑠 𝜓 𝑠𝑖𝑛 𝜃1 0 𝑐𝑜𝑠 𝜃
𝜓𝜃𝜙
EulerParameters
𝝀 𝝀𝟎,𝝀𝟏,𝝀𝟐,𝝀𝟑
12
𝜆 𝜆 𝜆𝜆 𝜆 𝜆𝜆 𝜆 𝜆𝜆 𝜆 𝜆
2 𝜆 𝜆 𝜆 𝜆𝜆 𝜆 𝜆 𝜆𝜆 𝜆 𝜆 𝜆
2 𝜆 𝜆 𝜆 𝜆𝜆 𝜆 𝜆 𝜆𝜆 𝜆 𝜆 𝜆
𝜆𝜆𝜆 𝜆
Kinematics
Dynamics
Jacobians
Inverses
Task
Representations
Equations of Motion
Operational Space Control
Dynamic
Models
Compliance
Force Control
Control
Modalities
Redundant
Robots
Posture
Null Space
Dynamic Behavior
Whole-Body Control
Menu
5
6

4
OperationalSpace
Framework!
Simulation of StanBotServing a Volleyball
7
8

5
Torque‐Controlled Robots
KUKA ‐ iiwaKUKA ‐ iiwa PANDAPANDA
9
10

6
SAI 2.0: Physical Simulation & Control
SAI 2.0: Physical Simulation & Control
11
12

7
Hands Underwateron Landin the Air
13
14

8
15
16

9
CS225A – Spring Projects
17
18

10
Final Project PresentationsExperimental Robotics (CS225A)Tuesday, November 17, 2020
19
20

11
TennisBot Gordon GroceryBot
William KoskiDimitri PetrakisChenkai
Ewurama KarikariZhengqiu LouJoseph WangJiaqiao Zhang
Gabriela Bravo IllanesMax FarrChun Ming Zhang
RehaBot DocBot DrawBot
Eleonore JacquemetRuta JoshiJuhi Madan
Yuxiao ChenDan FanShivani Guptasarma
Kaojun HeAce HuRan Le
CS225A – Spring2021 Projects
Sports EnvironmentCookingGroceries
Human Robot InteractionMedical
21
22

12
.. motion in contact
Whole‐body Compliance!
Joint Space Control
23
24
13
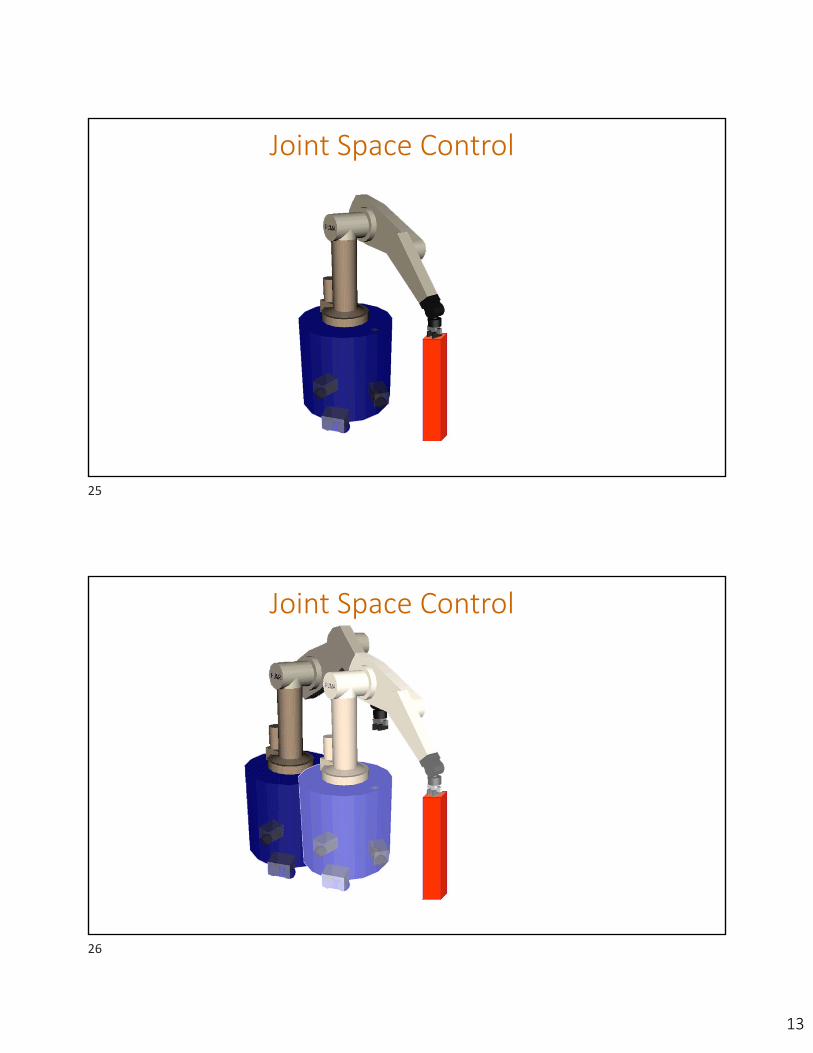
Joint Space Control
Joint Space Control
25
26

14
F
( )GoalV xF
( )GoalV x
T FJ
Task‐Oriented Control
F
dynamics( )F F
x
x Fp
Task‐Oriented Control
27
28

15
Unified Motion & Force Control
motion contactF F F contactF
motionF
Equations of Motion
d L LF
dt x x
with ( , ) ( , ) ( )gravityL x x T x x V x
29
30
16
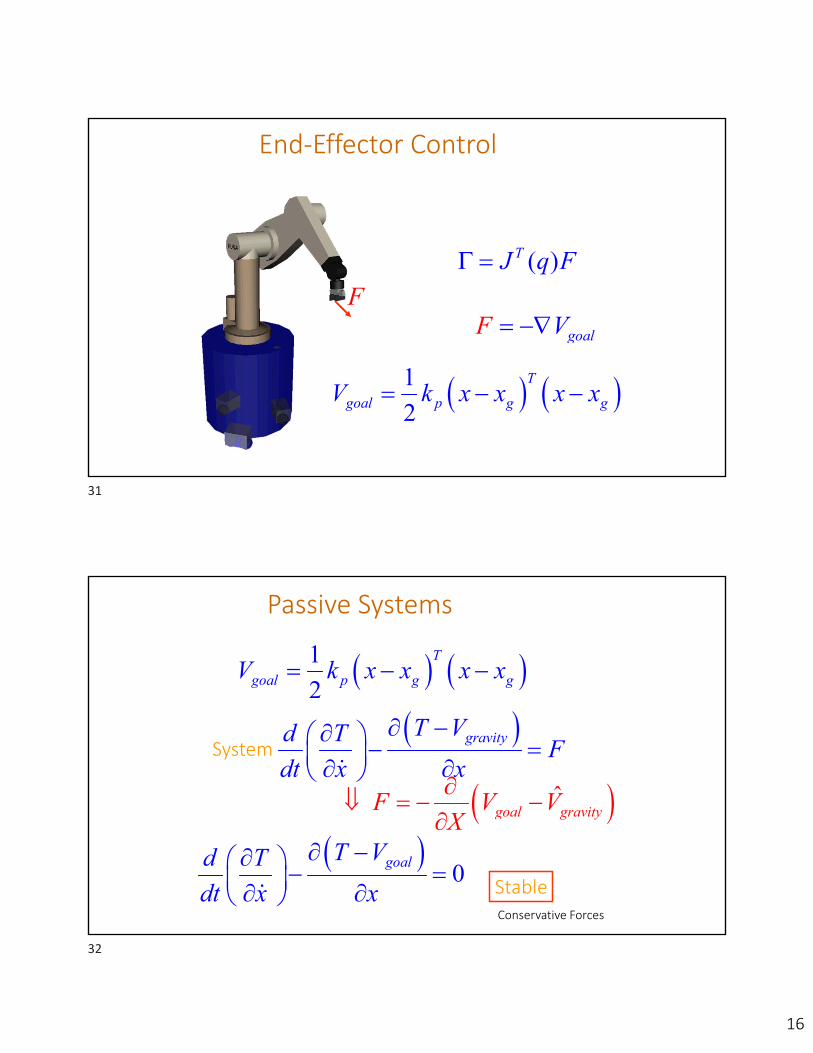
End‐Effector Control
( )TJ q F F
1
2
T
goal p g gV k x x x x
goalVF
1
2
T
goal p g gV k x x x x
System gravityT Vd T
Fdt x x
ˆ
goal gravityF V VX
Passive Systems
0
goalT Vd T
dt x x
StableConservative Forces
31
32

17
Asymptotic Stability
is asymptotically stable if
0 ; 0TsF x for x
0s v vF k x k
ˆp g vF k x x k x p Control
s
goalT Vd T
dt x xF
a system
sFx
Artificial Potential Field
33
34

18
( ) ( , ) ( )x x x x p x F
Operational Space Dynamics
End‐Effector Centrifugal and Coriolis forces
( , ) :x x
( ) :p x End‐Effector Gravity forces
:F End‐Effector Generalized forces
( ) : x End‐Effector Kinetic Energy Matrix
:x End‐Effector Position andOrientation
Example: 2‐d.o.f arm
ˆ ( )p g vF k x x k x p x
( ) ( , ) ( )x x x x p x F
1q1l
2q2l
35
36

19
Closed loop behavior
111*
1( ) v p gm q x k x k mx yx
122*
2( ) v p gm q y k y k my xy
* 2 *1 2 1 112 p g vm c m x m y k x x k x
* 2 *1 2 1 212 p g vm c m y m x k y y k y
( ) ( , ) ( )A q q b q q g q
Joint Space Dynamics
Centrifugal and Coriolis forces( , ) :b q q( ) :g q Gravity forces
: Generalized forces
( ) :A q Kinetic Energy Matrix
:q Joint Coordinates
37
38

20
Lagrange Equations
( )d L L
dt q q
( ) ( , ) ( )A q q b q q g q
(( )) ,A b q qq 1
2( ): TA q qAqT
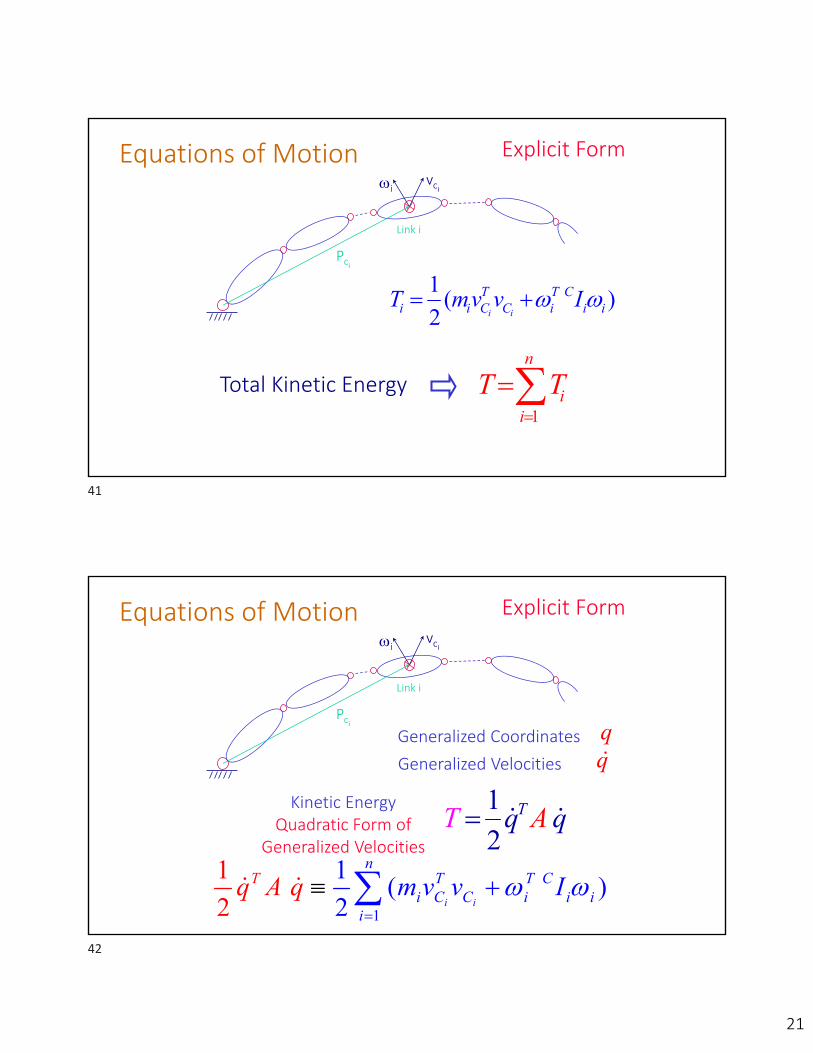
Equations of Motionvcii
Pci
Link i
TTotal Kinetic Energy:
1
2Lin i
T
kAqT T q
39
40
21
1( )2 i i
T T Ci i C C i i iT mv v I
1
n
ii
T T
vcii
Pci
Link i
Explicit Form
Total Kinetic Energy
Equations of Motion
Generalized Coordinates q
Kinetic EnergyQuadratic Form of
Generalized Velocities
1
1(
1
2)
2 i i
nT T C
i C C i iT
ii
m v vq A q I
q
1
2Tq qT A
vcii
Pci
Link i
Explicit Form
Generalized Velocities
Equations of Motion
41
42

22
i ivC Jv q
1
1( )
2 i i i i
T Tv v
nT T C
i ii
m q q qJ J J JI q
Explicit Formvcii
Pci
Link i
iiCJ q
1
1(
1
2)
2 i i
nT T C
i C C i iT
ii
m v vq A q I
Equations of Motion
vcii
Pci
Link i
Explicit Form
1
2Tq qA
1
( )1
2 i i i i
nT T
i vi
T Cv imq J J I J qJ
1
( )i i i i
nT T C
i v v ii
A m J J J I J
Equations of Motion
43
44

23
( )
11 12 1
21 22 2
1 2
( )n n
n
n
n n nn
a a a
a a aA q
a a a
Christoffel Symbols 1( )
2ijk ijk ikj jkib a a a
ij
k
a
q
2( , ) ( ) ( )b q q C q q B q qq
B
b b b
b b b
b b b
q q
q q
q qn
n n n n
n n
n n
n n n n n n n
( ) [ ]
(
( )) (( )
)
, , ,(
, , ,(
, , ,( (
q qq
L
N
MMMM
O
Q
PPPP
L
N
MMMM
O
Q
PPPP
1
2
1
21
2 2 2
2 2 2
2 2 2
1 12 1 13 1 1)
2 12 2 13 2 1)
12 13 1)
1 2
1 3
1)
C
b b b
b b b
b b b
q
q
qn n n
nn
nn
n n n nn n
( )[ ]
( ) ( )
, , ,
, , ,
, , ,
q q
L
N
MMMM
O
Q
PPPP
L
N
MMMM
O
Q
PPPP2
1 11 1 22 1
2 11 2 22 2
11 22
12
22
2
1
45
46

24
Gravity Vector
m2g
c2
m1g
c1mng
cnm3g
c3
1 21 2( ( ) ( ) ( ))n
T T Tv v v ng J m g J m g J m g
47