online monitoring of supercapacitor ageinggt-s3.cran.univ-lorraine.fr/doc/shi_21_11_2013.pdf · 2...
TRANSCRIPT
Online Monitoring of Supercapacitor Ageing
Authors:
Zhihao SHI, François AUGER, Emmanuel SCHAEFFER, Philippe GUILLEMET, Luc LORON
1
Réunion inter GDR inter GT – 21/11/2013
2
Content
� Introduction
� Applications of EDLCs (Electric Double Layer Capacitors)
� Advantages of EDLCs
� EDLCs models
� EDLCs Ageing
� Online Identification
� Principle
� Mathematical model of EDLCs system
� Observability of EDLCs system
� Identification methods
� Experimental Results
� Conclusion and future work
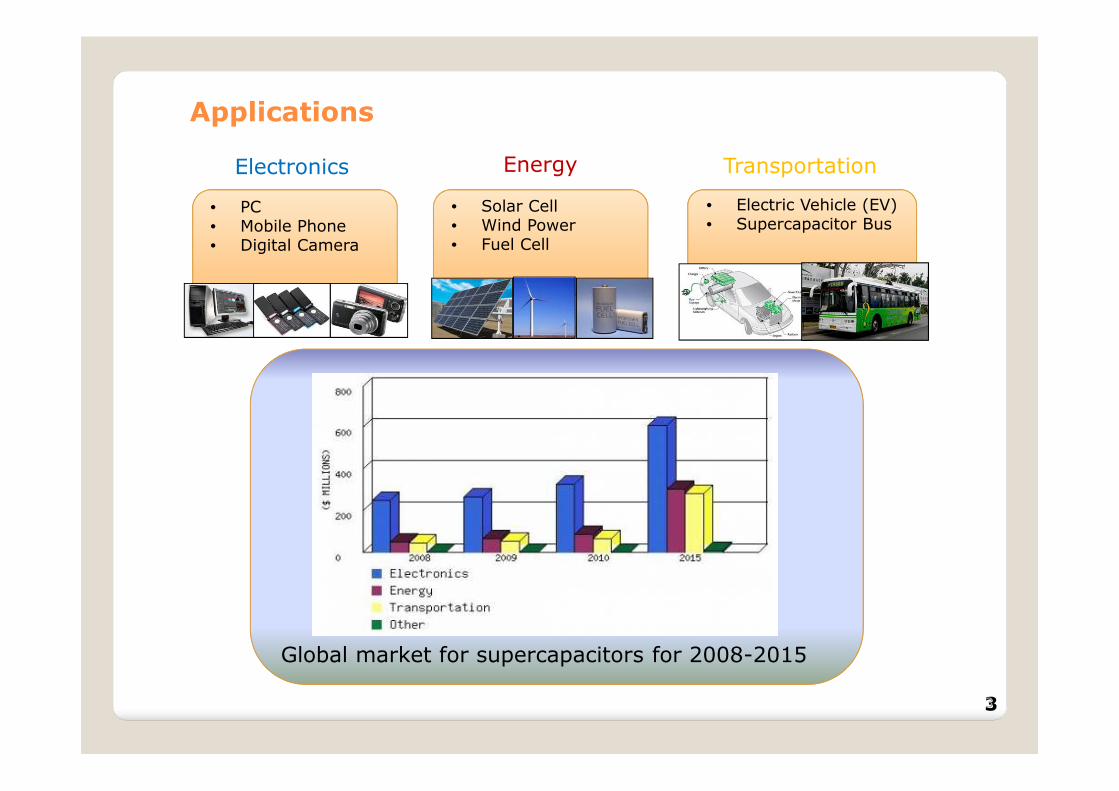
• PC• Mobile Phone• Digital Camera
Electronics Energy
• Solar Cell• Wind Power• Fuel Cell
Transportation
• Electric Vehicle (EV)• Supercapacitor Bus
Global market for supercapacitors for 2008-2015
Applications
33
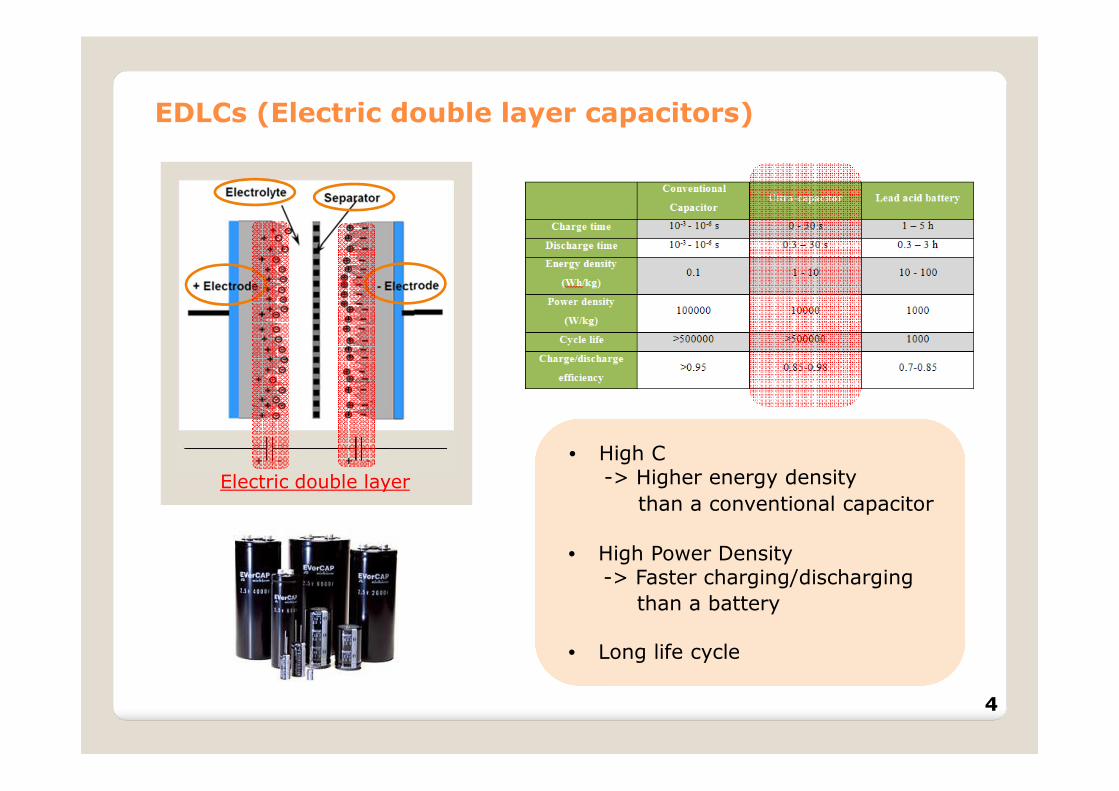
EDLCs (Electric double layer capacitors)
Electric double layer
• High C -> Higher energy density
• High Power Density -> Faster charging/discharging
• Long life cycle
than a conventional capacitor
than a battery
4
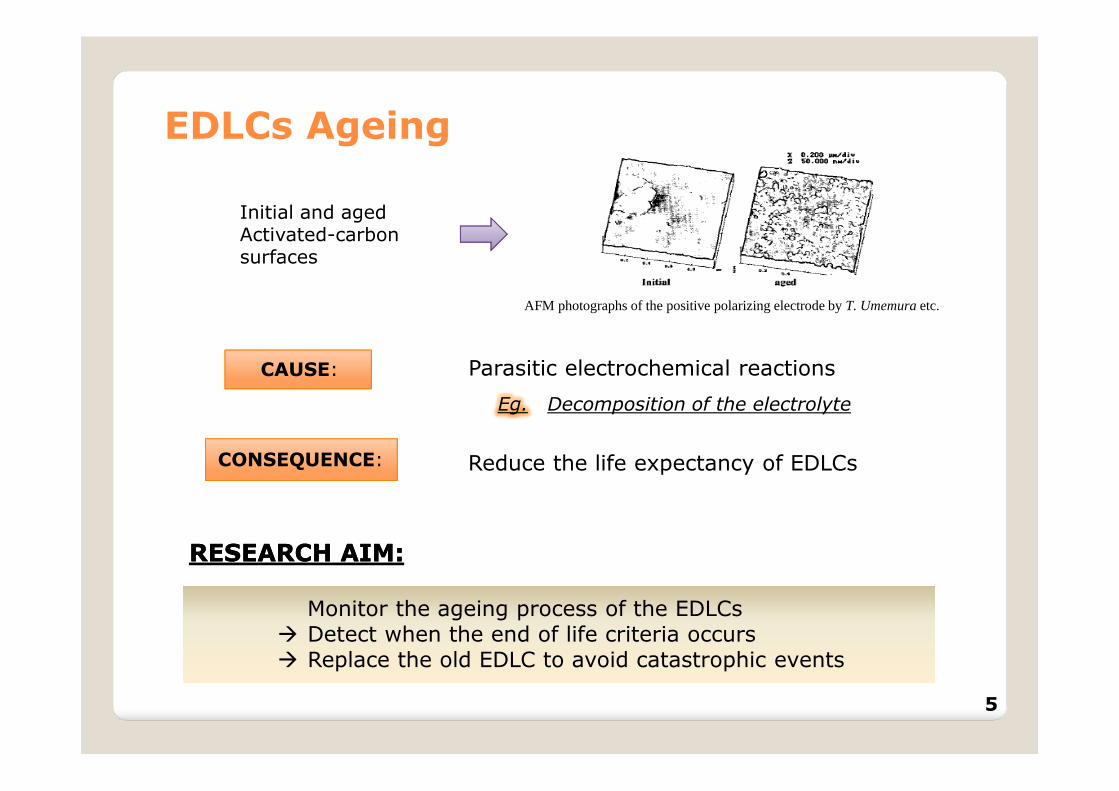
EDLCs Ageing
CAUSE:
CONSEQUENCE:
Parasitic electrochemical reactions
Eg. Decomposition of the electrolyte
Reduce the life expectancy of EDLCs
RESEARCH AIM:RESEARCH AIM:
Monitor the ageing process of the EDLCs � Detect when the end of life criteria occurs � Replace the old EDLC to avoid catastrophic events
Initial and aged Activated-carbon surfaces
AFM photographs of the positive polarizing electrode by T. Umemuraetc.
5
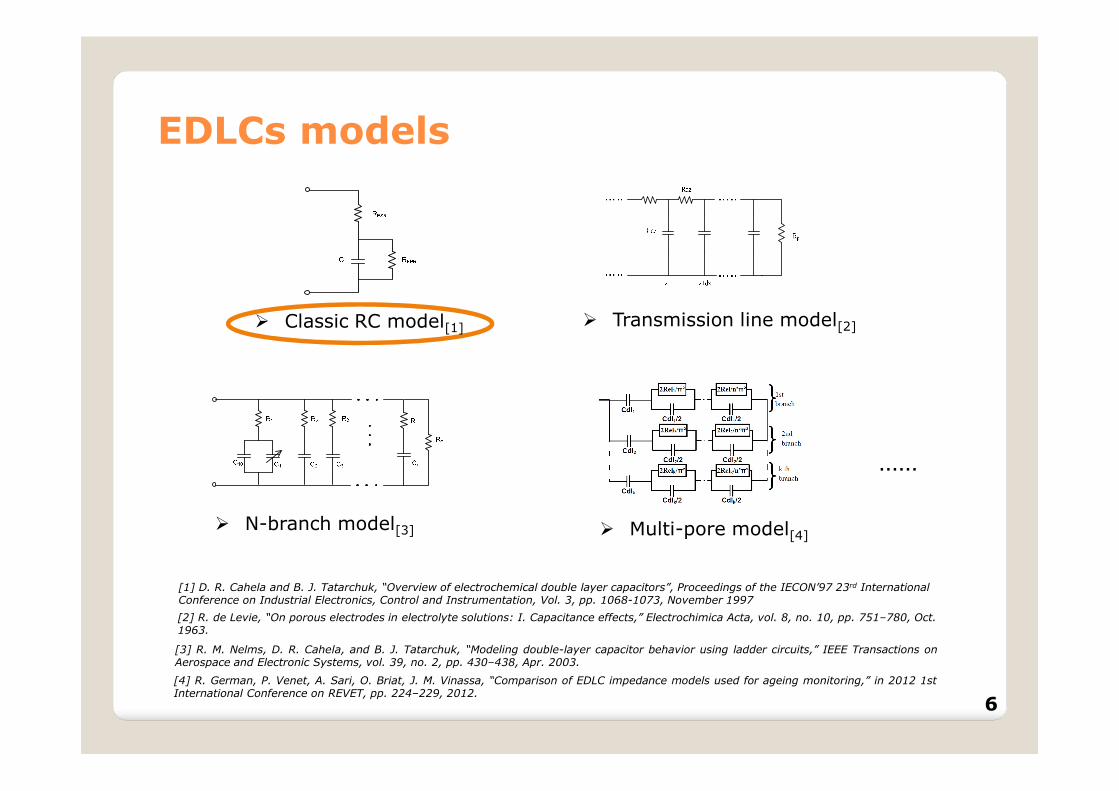
EDLCs models
� Classic RC model[1] � Transmission line model[2]
[1] D. R. Cahela and B. J. Tatarchuk, “Overview of electrochemical double layer capacitors”, Proceedings of the IECON’97 23rd International Conference on Industrial Electronics, Control and Instrumentation, Vol. 3, pp. 1068-1073, November 1997
[2] R. de Levie, “On porous electrodes in electrolyte solutions: I. Capacitance effects,” Electrochimica Acta, vol. 8, no. 10, pp. 751–780, Oct. 1963.
� N-branch model[3] � Multi-pore model[4]
……
[3] R. M. Nelms, D. R. Cahela, and B. J. Tatarchuk, “Modeling double-layer capacitor behavior using ladder circuits,” IEEE Transactions onAerospace and Electronic Systems, vol. 39, no. 2, pp. 430–438, Apr. 2003.
[4] R. German, P. Venet, A. Sari, O. Briat, J. M. Vinassa, “Comparison of EDLC impedance models used for ageing monitoring,” in 2012 1stInternational Conference on REVET, pp. 224–229, 2012.
6

An example:
RS
C
End of life
End of life
Ageing Variation of Parameters
Visible by
State of Health(SOH)
State of Health(SOH)
State of Charge(SOC)
State of Charge(SOC)
E �1
2CV
�
Estimate
Quantification of EDLCs Ageing
7
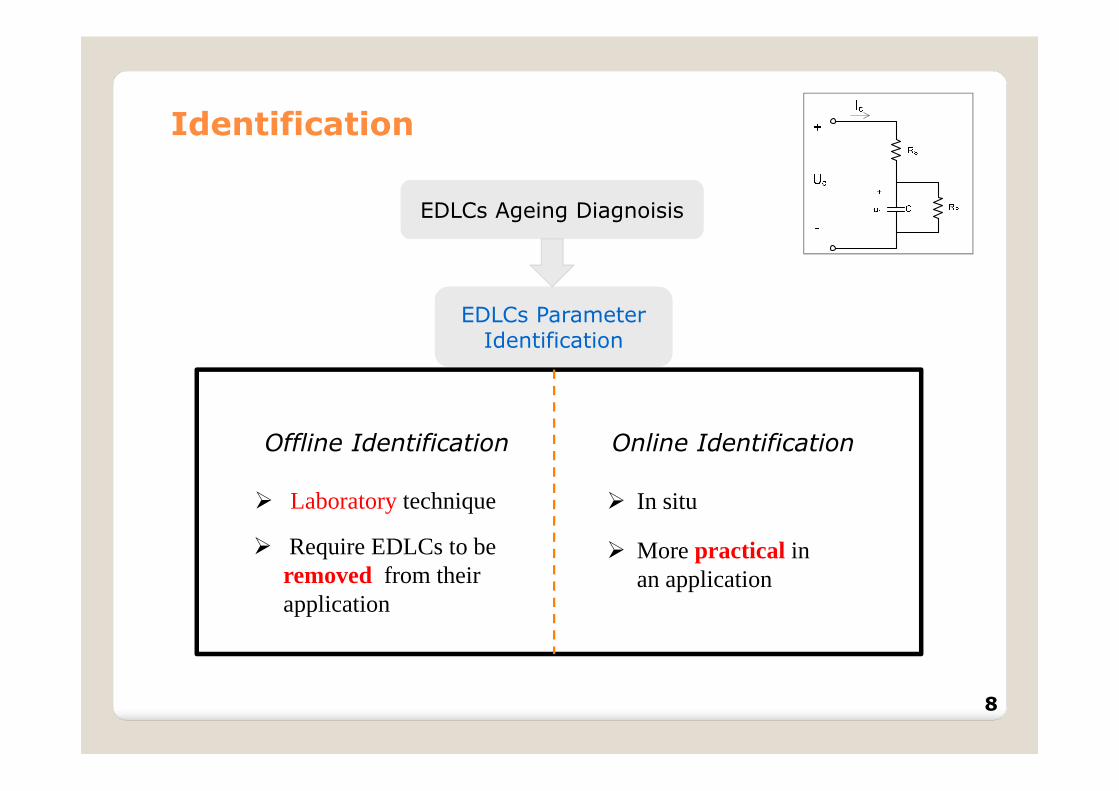
Identification
EDLCs Ageing DiagnoisisEDLCs Ageing Diagnoisis
EDLCs Parameter Identification
EDLCs Parameter Identification
Offline Identification Online Identification
� Laboratorytechnique
� Require EDLCs to be removed from their application
� More practical in an application
� In situ
8
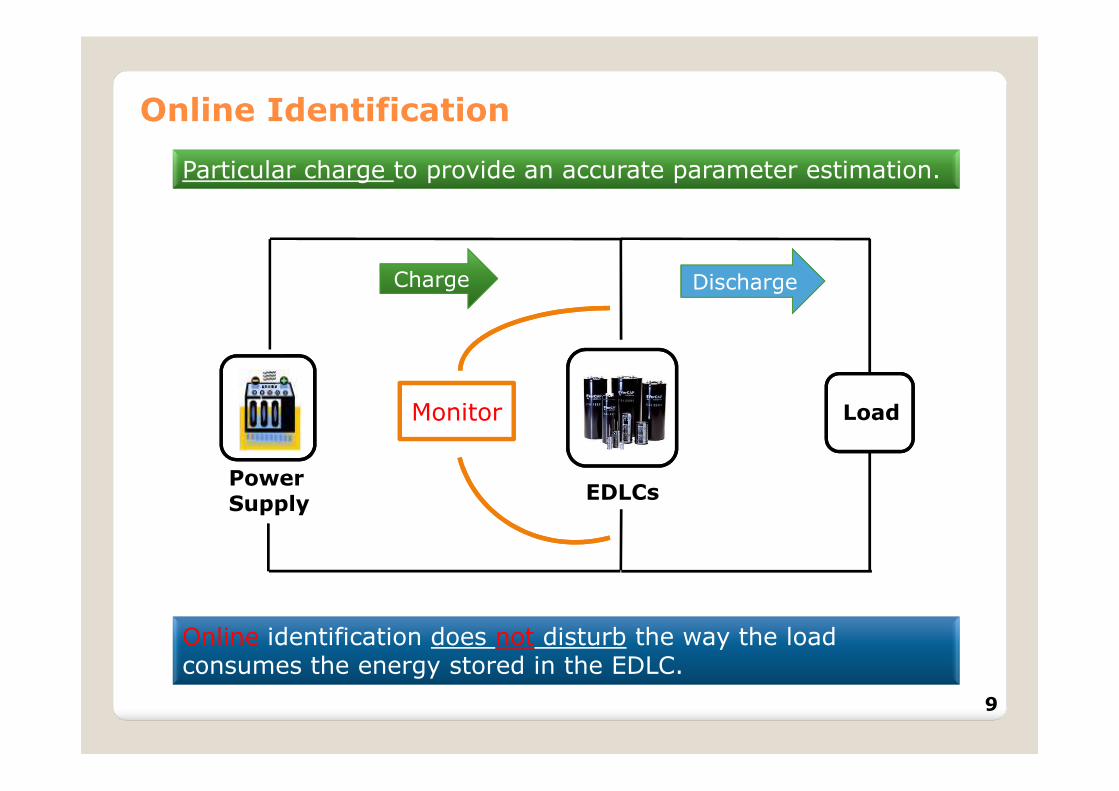
Online Identification
Charge
Power Supply
EDLCs
Monitor
Particular charge to provide an accurate parameter estimation.
Load
Discharge
Online identification does not disturb the way the loadconsumes the energy stored in the EDLC.
9
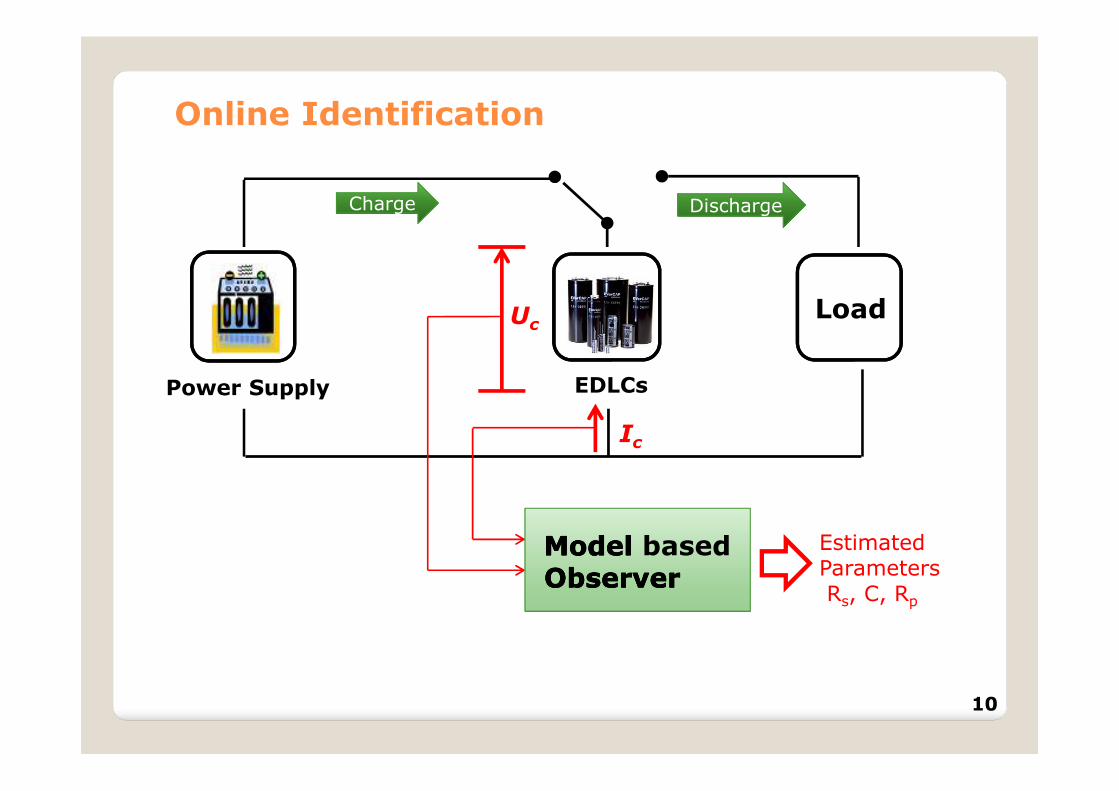
Online Identification
Load
ChargeCharge DischargeDischarge
Power Supply EDLCs
Uc
Ic
Model basedObserver
EstimatedParameters Rs, C, Rp
ModelModelObserverObserver
10
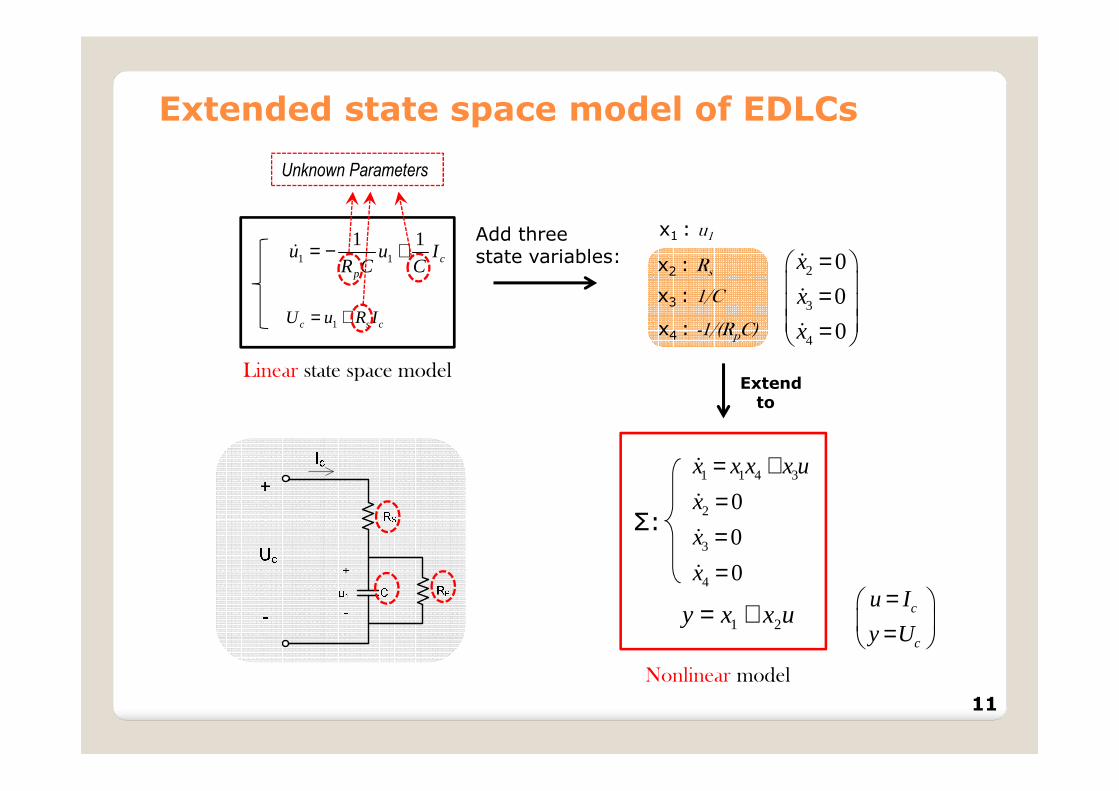
Extended state space model of EDLCs
1 1
1 1c
p
u u IR C C
= − +&
1c s cU u R I= +
x2 : Rs
x3 : 1/C
x4 : -1/(RpC)
Add three state variables:
2
3
4
0
0
0
x
x
x
= = =
&
&
&
1 1 4 3
2
3
4
0
0
0
x x x x u
x
x
x
= +===
&
&
&
&
1 2y x x u= +
Σ:
Linear state space model
Nonlinear model
c
c
u I
y U
= =
x1 : u1
Unknown Parameters
Extend to
11

Online state and parameter estimation
x1 = u1
x2 = Rs
x3 = 1/C
x4 = -1/(RpC)
1 1 4 3
2
3
4
0
0
0
x x x x u
x
x
x
= +===
&
&
&
&
1 2y x x u= +
Σ:
Extended state space model
Estimatedparameters
Model basedObserver
Rs; 1/C; -1/(RpC)
c
c
u I
y U
= =
?
Estimatedinternal state State of charge
estimation
12
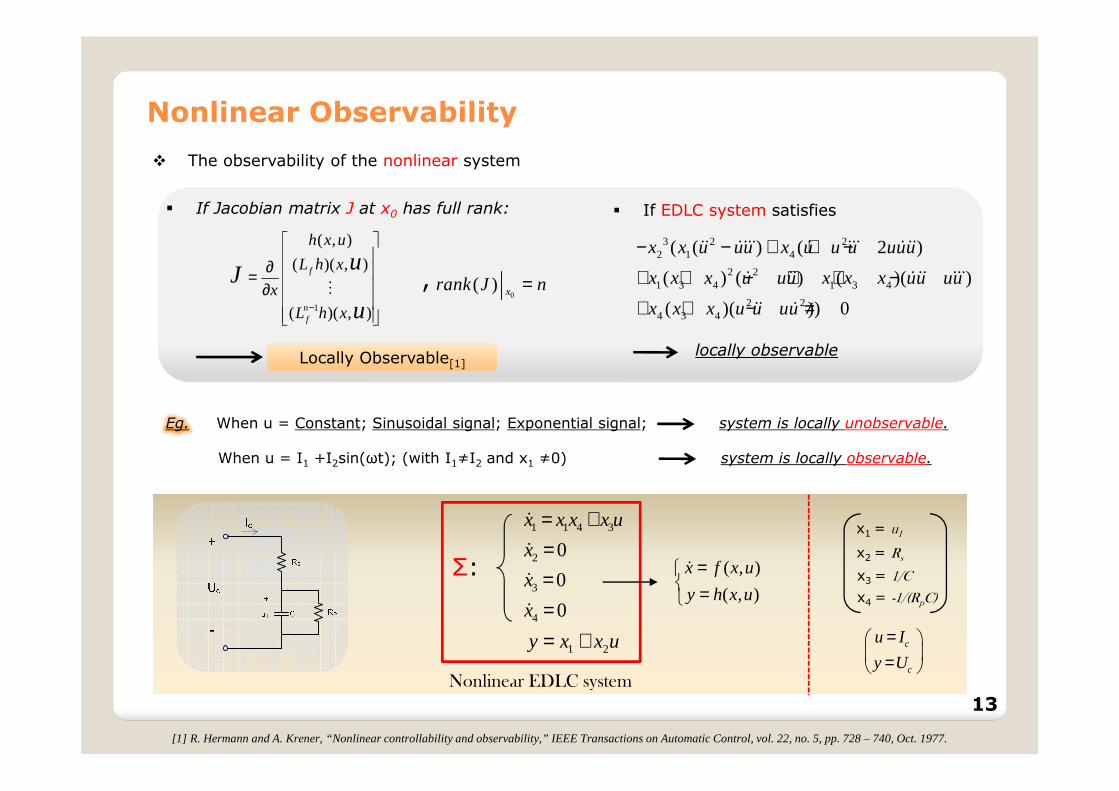
Nonlinear Observability
� The observability of the nonlinear system
1 1 4 3
2
3
4
0
0
0
x x x x u
x
x
x
= +===
&
&
&
&
1 2y x x u= +
Σ:
Nonlinear EDLC system
x4 = -1/(RpC)
x1 = u1
x2 = Rs
x3 = 1/C
c
c
u I
y U
= =
3 2 22 1 4
2 21 3 4 1 3 4
2 24 3 4
( ( ) ( 2 )
( ) ( ) ( )( )
( )( )) 0
x x u uu x u u u uuu
x x x u uu x x x uu uu
x x x u u uu
− − + + −
+ + − + + −
+ + − ≠
&& &&&& & &&& &&&
& && &&& &&&
&& &
� If EDLC system satisfies
locally observable
� If Jacobian matrix J at x0 has full rank:
1
( , )
( )( , )
( )( , )
f
nf
h x u
L h x
x
L h x
uJ
u−
∂ = ∂
M 0( ) xrank J n=
Locally Observable[1]Locally Observable[1]
,
[1] R. Hermann and A. Krener, “Nonlinear controllability and observability,” IEEE Transactions on Automatic Control, vol. 22, no. 5, pp. 728 – 740, Oct. 1977.
Eg. When u = Constant; Sinusoidal signal; Exponential signal; system is locally unobservable.
When u = I1 +I2sin(ωt); (with I1≠I2 and x1 ≠0) system is locally observable.
( , )
( , )
x f x u
y h x u
= =
&
13
14
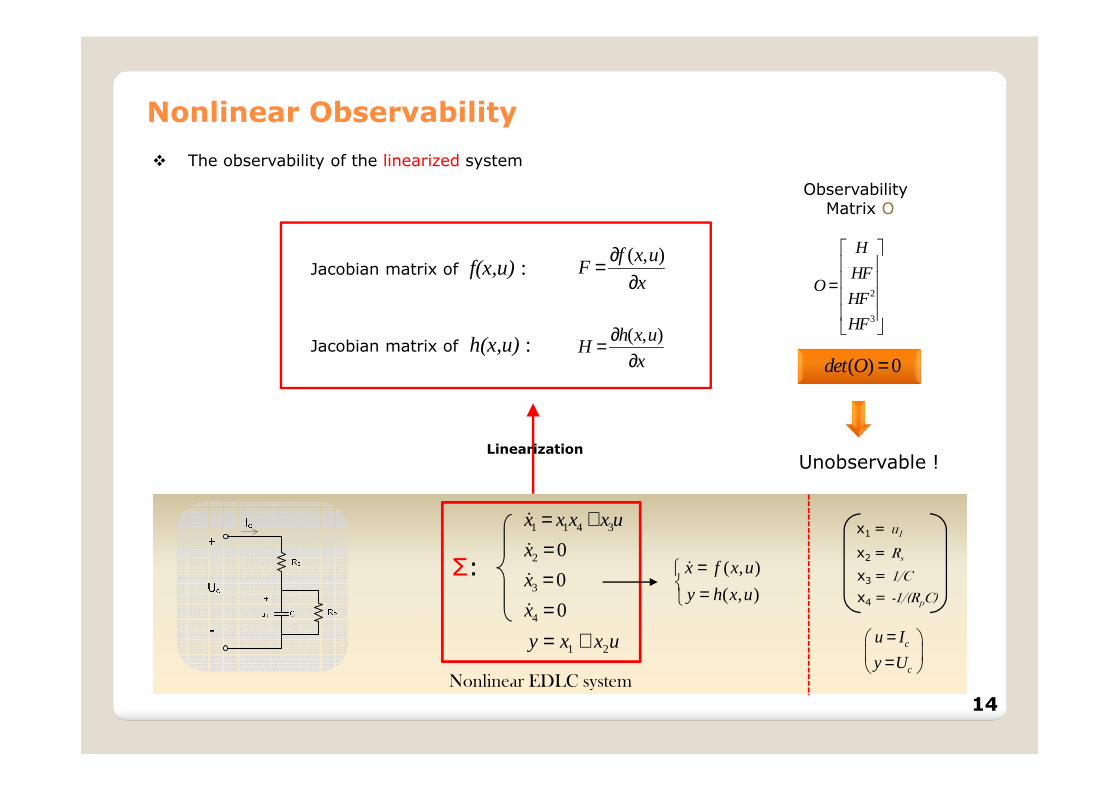
Nonlinear Observability
� The observability of the linearized system
( , )f x uF
x
∂=∂
( , )h x uH
x
∂=∂
ObservabilityMatrix O
2
3
H
HFO
HF
HF
=
( ) 0det O =
LinearizationUnobservable !
Jacobian matrix of f(x,u) :
Jacobian matrix of h(x,u) :
1 1 4 3
2
3
4
0
0
0
x x x x u
x
x
x
= +===
&
&
&
&
1 2y x x u= +
Σ:
Nonlinear EDLC system
x4 = -1/(RpC)
x1 = u1
x2 = Rs
x3 = 1/C
c
c
u I
y U
= =
( , )
( , )
x f x u
y h x u
= =
&
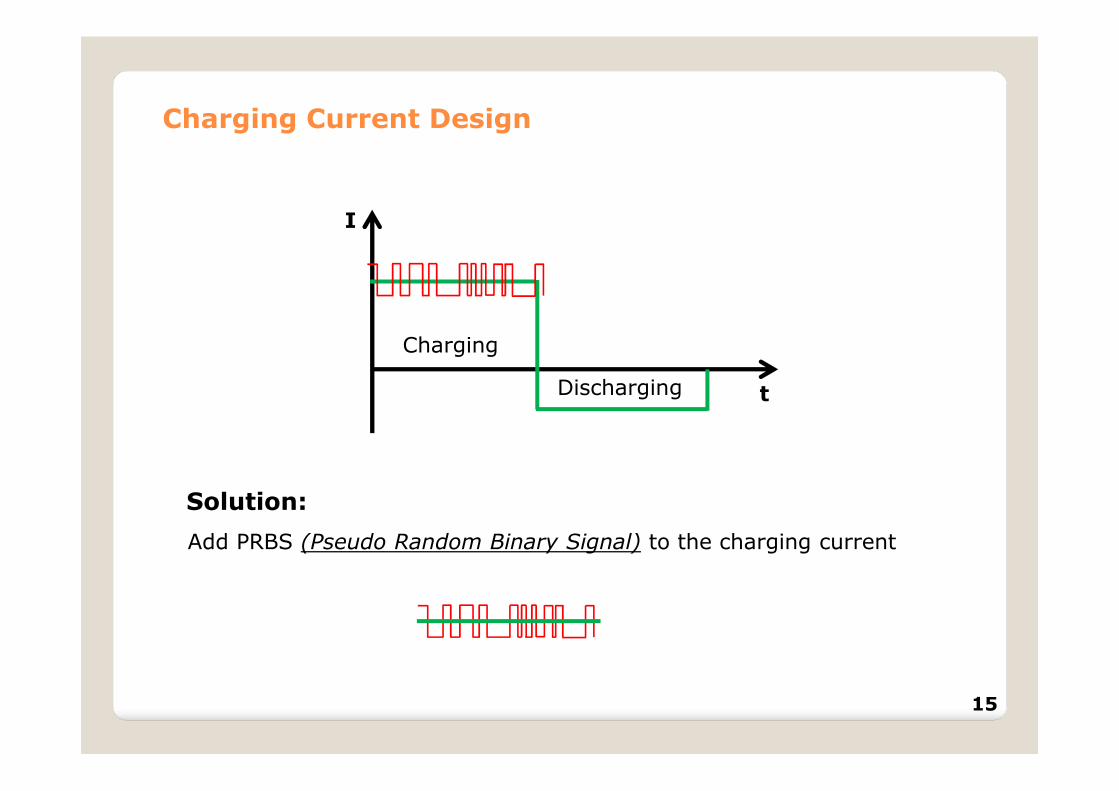
Charging Current Design
Charging
Discharging t
I
Solution:
Add PRBS (Pseudo Random Binary Signal) to the charging current
15

Extended Kalman Observer (EKO)
( , )
( , )
x f x u w
y h x u v
= += +
&Extended system dynamics :
Measured output :
w : Process noise
v : Sensor noise
x̂ : states estimated by the observer
1TK PH R−= 1T TP FP PF PH R HP Q−= + − +&
EDLCs
K
EKO
ˆ ˆ ˆ( , ) ( )x f x u K y y= + −&
ˆ ˆ( , )y h x u=
nv
ni
ˆy y−+
-1
2
3
4
ˆ
ˆ
ˆ
ˆ
x
x
x
x
Calculation of K:
IIIIcccc UUUUcccc
for
x1 = u1
x2 = Rs
x3 = 1/C
x4 = -1/(RpC)
Parameter Estimation
, with
16
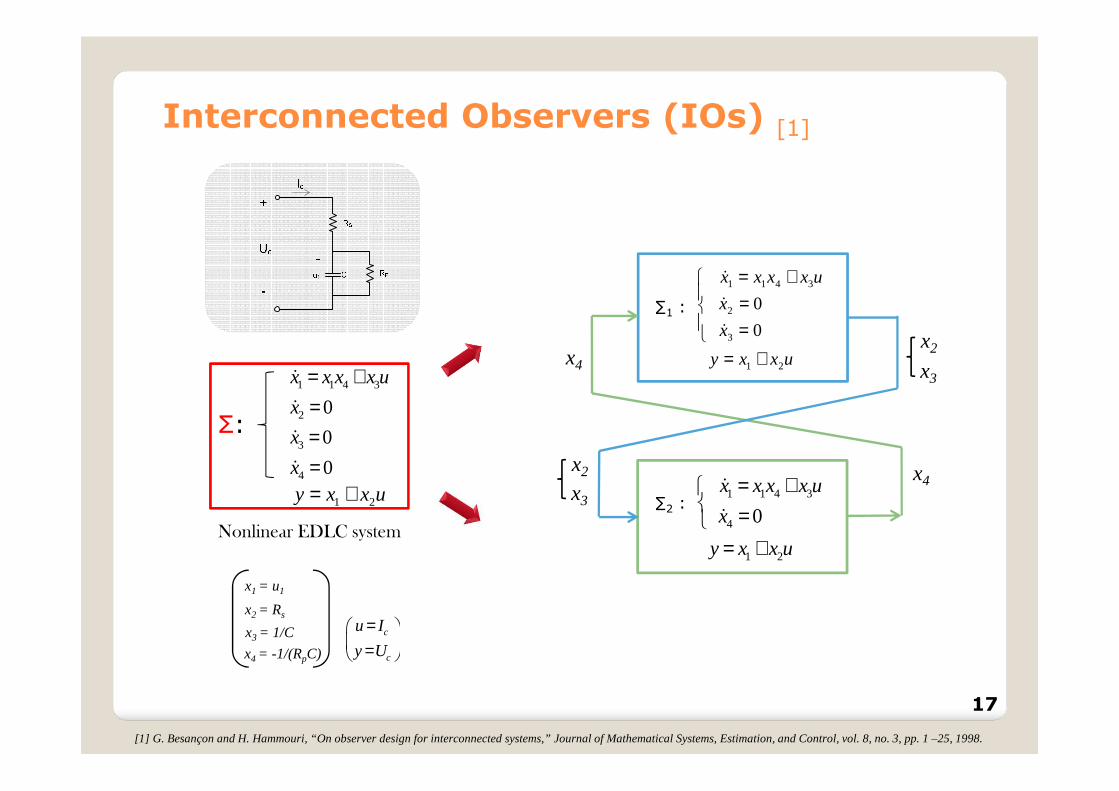
Interconnected Observers (IOs) [1]
Nonlinear EDLC system
1 1 4 3
2
3
4
0
0
0
x x x x u
x
x
x
= +===
&
&
&
&
1 2y x x u= +
Σ:
∑1 :
1 1 4 3
2
3
1 2
0
0
x x x x u
x
x
y x x u
= + = =
= +
&
&
&
1 1 4 3
4
1 2
0
x x x x u
x
y x x u
= + =
= +
&
&∑2 :
x4
x4 = -1/(RpC)
x1 = u1
x2 = Rs
x3 = 1/C c
c
u I
y U
= =
x2
x3
x2
x3x4
[1] G. Besançon and H. Hammouri, “On observer design for interconnected systems,” Journal of Mathematical Systems, Estimation, and Control, vol. 8, no. 3, pp. 1 –25, 1998.
17
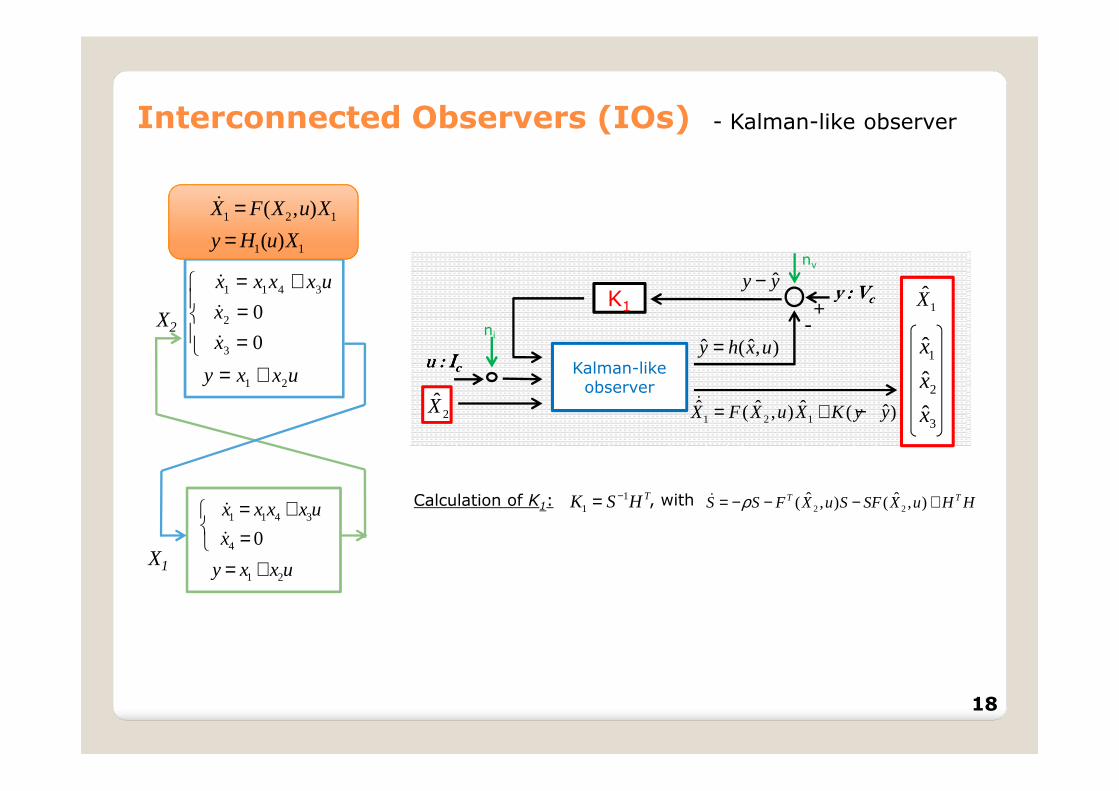
Interconnected Observers (IOs)
1 1 4 3
2
3
1 2
0
0
x x x x u
x
x
y x x u
= + = =
= +
&
&
&
X2
K1
Kalman-like observer
1 2 1ˆ ˆ ˆ ˆ( , ) ( )X F X u X K y y= + −&
ˆ ˆ( , )y h x u=
nv
ni
ˆy y−+
-
1
2
3
ˆ
ˆ
ˆ
x
x
x
uuuu : : : : IIIIcccc
y : y : y : y : VVVVcccc
1 2 1
1 1
( , )
( )
X F X u X
y H u X
==
&
1 1 4 3
4
1 2
0
x x x x u
x
y x x u
= + =
= +
&
&
X1
1X̂
11
TK S H−= 2 2ˆ ˆ( , ) ( , )T TS S F X u S SF X u H Hρ= − − − +&Calculation of K1:
2X̂
, with
- Kalman-like observer
18

1 1 4 3
4
1 2
0
x x x x u
x
y x x u
= + =
= +
&
&
1 1 4 3
2
3
1 2
0
0
x x x x u
x
x
y x x u
= + = =
= +
&
&
&
X2
X1
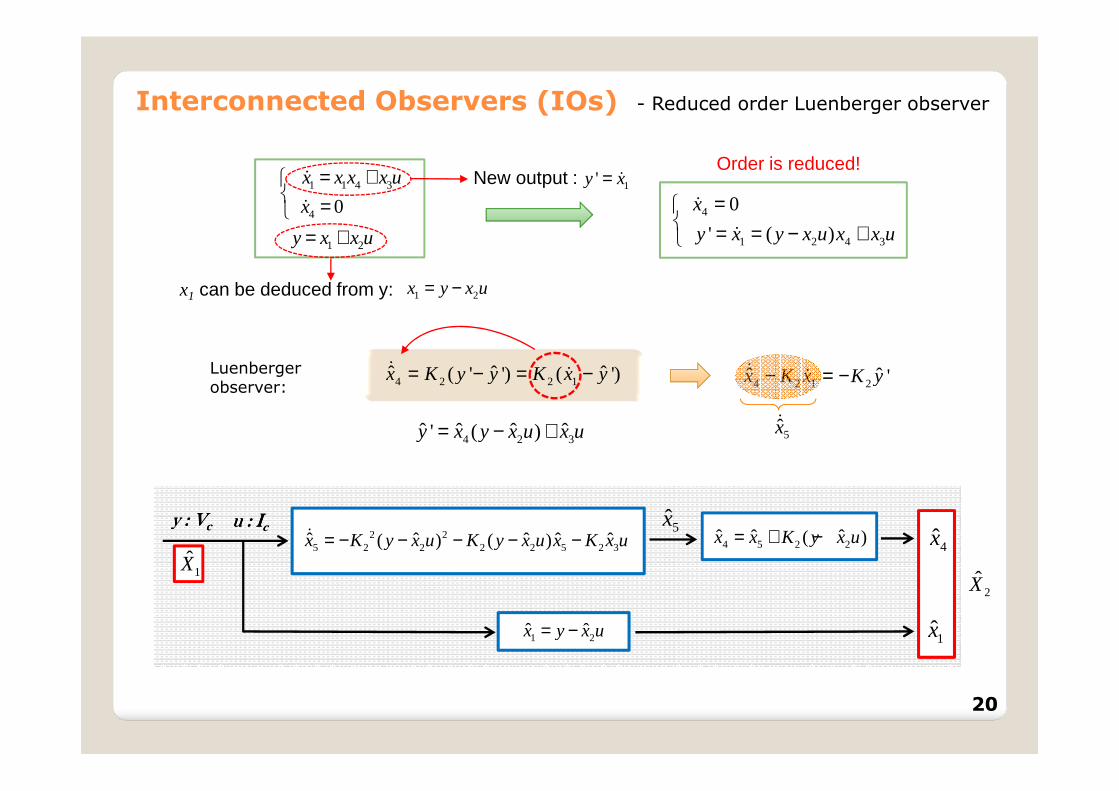
Interconnected Observers (IOs) - Reduced order Luenberger observer
19
2X̂
Interconnected Observers (IOs)
1 1 4 3
4
1 2
0
x x x x u
x
y x x u
= + =
= +
&
&
1 2x y x u= −
1'y x= &New output :
4
1 2 4 3
0
' ( )
x
y x y x u x x u
= = = − +
&
&
Order is reduced!
x1 can be deduced from y:
- Reduced order Luenberger observer
4 2 2 1ˆ ˆ ˆ( ' ') ( ')x K y y K x y= − = −& &
4 2 3ˆ ˆ ˆ ˆ' ( )y x y x u x u= − +
4 2 1 2ˆ ˆ 'x K x K y− = −& &
5x̂&
2 25 2 2 2 2 5 2 3ˆ ˆ ˆ ˆ ˆ( ) ( )x K y x u K y x u x K x u= − − − − −&
4x̂uuuu : : : : IIIIccccy : y : y : y : VVVVcccc 5x̂
4 5 2 2ˆ ˆ ˆ( )x x K y x u= + −
1 2ˆ ˆx y x u= − 1x̂
Luenbergerobserver:
1X̂
20
Convergence of IOs
1 1 1TV e Se=
1 1 1ˆe X X= −Estimation error from KLO:
Estimation error from ROLO: 2 2 2ˆe X X= −
Convergence ?
Lyapunove Function Definition
For ROLO: 22 2 2
TV e T e=For Whole Observer: 0 1 2V V V= +
0 2 0( , )V K Vδ ρ≤&
For KLO:
If : 2( , ) 0Kδ ρ <and
Estimations of IOs are convergent.
21

Comparison of the two kinds of observers
Extended Kalman Observer (EKO) Interconnected Observers (IOs)
� Is able to estimate the parameters online
� Is able to estimate the parameters online
� The convergence is guaranteed
� It is difficult to prove its convergence.
� More tuning parameters � Less tuning parameters
22

Ageing Experiments
� EDLC tested:
� Ageing test bench:
Stoves VSPVoltage source
Nichicon UM series 2,7V/1F
Thermostat
Ageing Acceleration
60˚C
12 weeks ageing
23
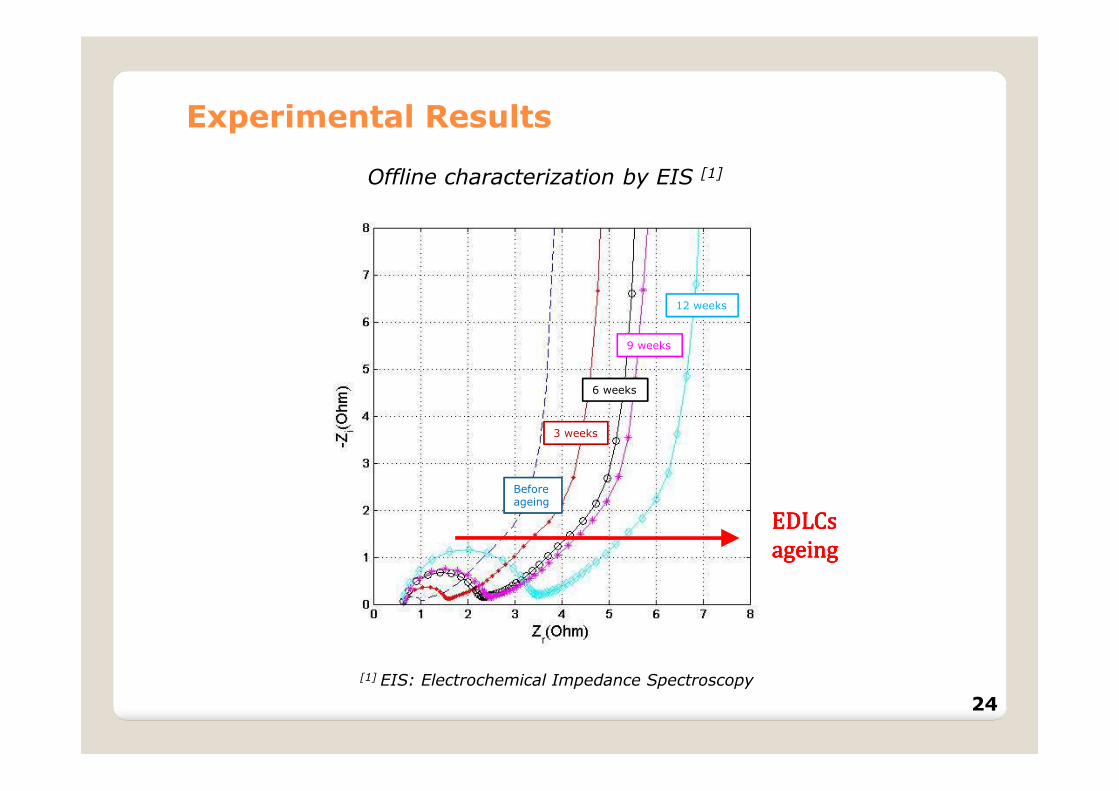
Experimental Results
Offline characterization by EIS [1]
Before ageing
6 weeks
3 weeks
9 weeks
12 weeks
[1] EIS: Electrochemical Impedance Spectroscopy
EDLCs EDLCs EDLCs EDLCs
ageingageingageingageing
24
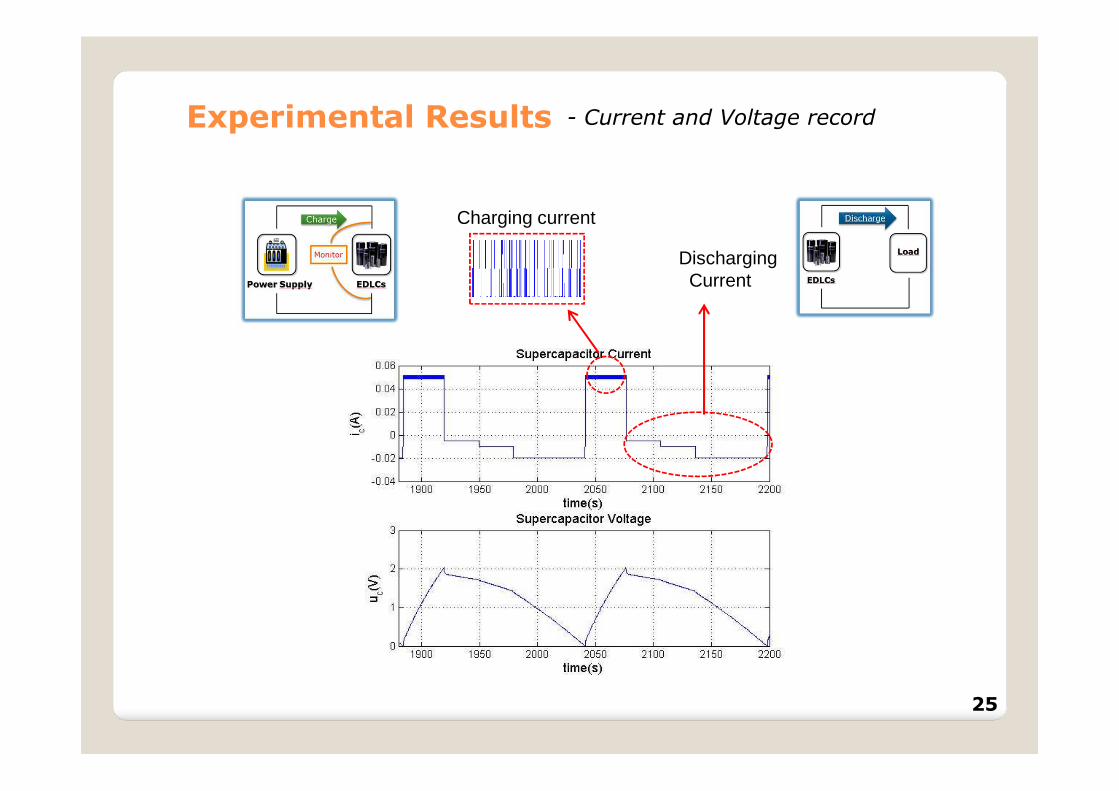
Charging current
DischargingCurrent
- Current and Voltage record
25
Experimental Results
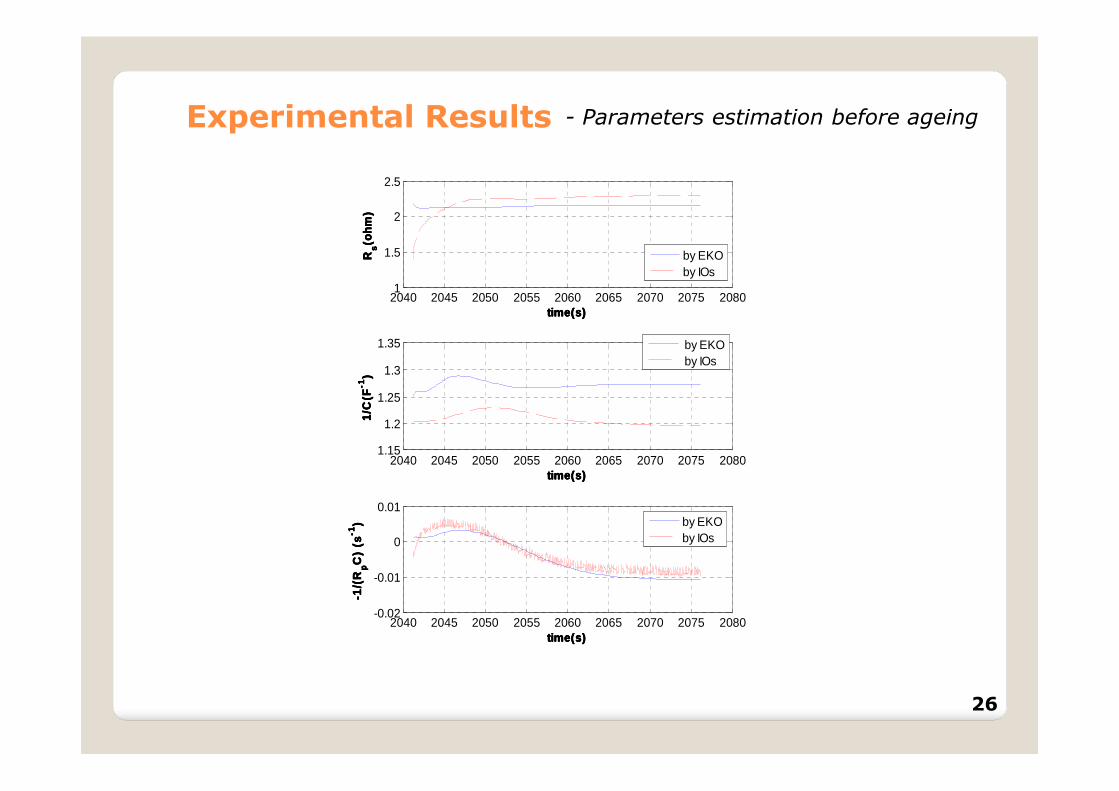
- Parameters estimation before ageing
2040 2045 2050 2055 2060 2065 2070 2075 20801
1.5
2
2.5
time(s)time(s)time(s)time(s)
RR RRss ss(o
hm
)(o
hm
)(o
hm
)(o
hm
)
by EKOby IOs
2040 2045 2050 2055 2060 2065 2070 2075 20801.15
1.2
1.25
1.3
1.35
time(s)time(s)time(s)time(s)
1/C
(F1
/C(F
1/C
(F1
/C(F
-- -- 11 11)) ))
by EKO by IOs
2040 2045 2050 2055 2060 2065 2070 2075 2080-0.02
-0.01
0
0.01
time(s)time(s)time(s)time(s)
-1/(
R-1
/(R
-1/(
R-1
/(R
pp ppC
) (s
C)
(sC
) (s
C)
(s-- -- 11 11
)) ))
by EKOby IOs
26
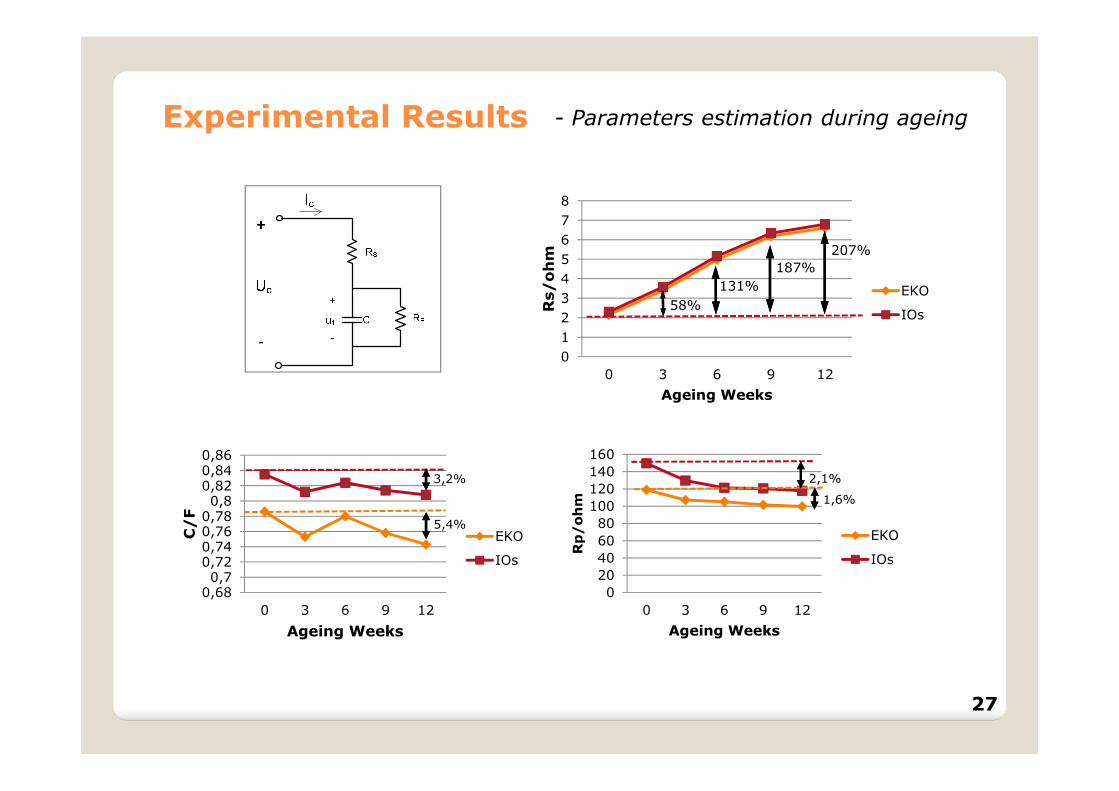
Experimental Results
0
1
2
3
4
5
6
7
8
0 3 6 9 12
Rs/
oh
m
Ageing Weeks
EKO
IOs58%
131%
187%
207%
0,680,7
0,720,740,760,780,8
0,820,840,86
0 3 6 9 12
C/
F
Ageing Weeks
EKO
IOs
0
20
40
60
80
100
120
140
160
0 3 6 9 12
Rp
/o
hm
Ageing Weeks
EKO
IOs
3,2%
5,4%
2,1%
1,6%
- Parameters estimation during ageing
27
Experimental Results
Conclusions
� An online in situ monitoring method by means of real-time
observers is proposed to monitor the EDLCs ageing.
� To monitor the parameter evolution online, two kinds of real time
observers (EKO and IOs) are designed. Compared to EKO, IOs have
a lower computational cost and a guaranteed convergence.
� Real ageing experimental data showed that both observers succeed
to estimate the parameters in real time and to perceive their
evolution.
Future Work
� Better EDLCs models will be used to the online observation of theageing of EDLCs.
28( This work has already been presented at the IEEE IECON 2013 conference in Vienna in Nov. 2013)

E-mail: [email protected]
Thank you for your Thank you for your Thank you for your Thank you for your attention!attention!attention!attention!