offshore supply vessels equipped with voith schneider ... · pdf filefig. 1:voith schneider...
TRANSCRIPT
1. Introduction2. Hydrodynamic Principle of a
Voith Schneider Propeller3. Model Testing
“Comparison study between VSPand CRP” at Marintek/Norway
4. Model Testing “PSV with VSP,Optimisation of Hull Form andSlamming Testing” at SVA, Vienna/Austria
5. Roll Damping with Voith Schneider Propeller – Calculation for a PSV
6. Dynamic Positioning with Voith Schneider Propellers
7. Conclusion/Summary
Voith Turbo
Offshore Supply Vessels equipped with Voith Schneider Propellers
Ivo BeuDr. Dirk Jürgens, Ivo Beu
This document, and more, is available for download at Martin's Marine Engineering Page - www.dieselduck.net

1. Introduction
The Voith Schneider Propeller(VSP) is a propulsion system allow-ing stepless, highly accurate andfast control of thrust in terms ofmagnitude and direction. The mainadvantages of the Voith SchneiderPropeller (Fig. 1) for the propulsionof modern Offshore Supply Vesselsare as follows:
� Stepless control of thrust in termsof magnitude and direction
� Thrust and propulsion efficiencyare equal in all directions
� Thrust control corresponds withthe ship's main axis, i. e. in accor-dance with certain X-/Y-coordi-nates
� Main engines can be operatedwith constant or variable speed,adapted to the manoeuvring, DPand free running condition, withoptimum fuel efficiency of diesel-direct and/or diesel-electric drivesystems without reversing
� The Voith Schneider Propeller isextremely slow-running andtherefore reliable with high safetymargins against rough service,and its service life is at least aslong as that of the vessel. Due toits X-/Y-coordinate logics, theVSP does not generate undesir-able side thrust vectors duringmanoeuvring.
On a VSP-driven PSV, very fast andprecise thrust changes are neces-sary. Such features are guaranteedby the VSP with very precisemanoeuvres with quick responsetimes in normal and emergencyoperating conditions – an essentialsafety aspect for the captain, as thevessel is under control at all times.This aspect is of paramount impor-tance during operation at offshoreinstallations in heavy weather con-ditions.
Fig. 2: Voith Water Tractor, Ajax
Benchmark model scale tests
were performed and showed
that the efficiency of the VSP
is superior to other competi-
tive propulsors.
These competitive model scale
tests as well as other model
tests and developments of
Voith Turbo Marine and the
first PSV for Rederi Østensjø
AS are the topics of this paper.
Fig. 1: Voith Schneider Propeller
This document, and more, is available for download at Martin's Marine Engineering Page - www.dieselduck.net

An important feature is the redun-dancy of the entire propulsionsystem, which guarantees full con-trol of the vessel even with only onepower train in operation.
The very rapid and precise thrustvariation according to Cartesiancoordinates makes the VSP anideal propulsion system for efficientdynamic positioning even inextremely rough weather conditions.
The Voith Schneider Propeller offers additional roll stabilization forOSVs, which reduces the rollmotion of the PSV while it is station-ary. This additional function hasbeen proven by Voith in theoreticalcomputations with the University ofHamburg-Harburg, during modeltank tests and full scale measure-ments in the North Sea.
Fig. 3: Voith Water Tractor, Velox Fig. 4: Voith Water Tractor, Tenax
The main features of the VoithSchneider Propulsion system wereproven by Østensjø Rederi AS,Haugesund, Norway, on the basis ofthe design, the construction and theoperation of three “state-of-the-art”Escort Voith Water Tractors – the“Ajax” (Fig. 2), the “Velox” (Fig. 3)and the “Tenax” (Fig. 4), that arenow used to safeguard tankers at oilterminals.
All of these Voith Water Tractorshave demonstrated the uniquecharacteristics of the Voith Schnei-der Propellers in terms of manoeu-vrability, dynamic positioning,redundancy, controllability andlifecycle costs.
The purpose of the joint investiga-tion program between ØstensjøRederi AS and Voith Turbo Marine
was the analysis of propulsionefficiency of VSPs on modern OSVsin comparison to other new andhighly sophisticated propulsionsystems such as the CRP acrossthe entire operation range, as wellas the analysis of the sea-keepingbehaviour of the different aft bodyconfigurations adopted to the spe-cific propulsion system require-ments.
23
This document, and more, is available for download at Martin's Marine Engineering Page - www.dieselduck.net
2. Hydrodynamic Principle of a Voith Schneider Propeller
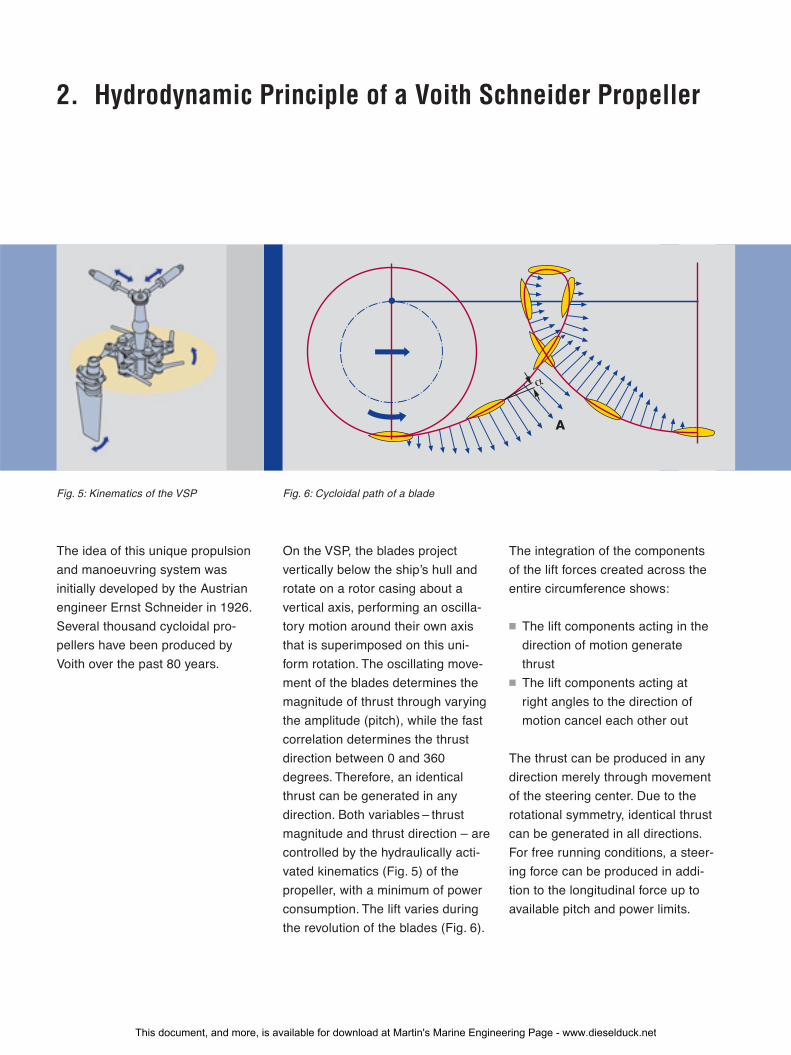
Fig. 6: Cycloidal path of a bladeFig. 5: Kinematics of the VSP
α
The idea of this unique propulsionand manoeuvring system wasinitially developed by the Austrianengineer Ernst Schneider in 1926.Several thousand cycloidal pro-pellers have been produced byVoith over the past 80 years.
On the VSP, the blades projectvertically below the ship’s hull androtate on a rotor casing about avertical axis, performing an oscilla-tory motion around their own axisthat is superimposed on this uni-form rotation. The oscillating move-ment of the blades determines themagnitude of thrust through varyingthe amplitude (pitch), while the fastcorrelation determines the thrustdirection between 0 and 360degrees. Therefore, an identicalthrust can be generated in anydirection. Both variables – thrustmagnitude and thrust direction – arecontrolled by the hydraulically acti-vated kinematics (Fig. 5) of thepropeller, with a minimum of powerconsumption. The lift varies duringthe revolution of the blades (Fig. 6).
The integration of the componentsof the lift forces created across theentire circumference shows:
� The lift components acting in thedirection of motion generatethrust
� The lift components acting atright angles to the direction ofmotion cancel each other out
The thrust can be produced in anydirection merely through movementof the steering center. Due to therotational symmetry, identical thrustcan be generated in all directions.For free running conditions, a steer-ing force can be produced in addi-tion to the longitudinal force up toavailable pitch and power limits.
This document, and more, is available for download at Martin's Marine Engineering Page - www.dieselduck.net

45
3. Model Test “Comparison Study between
VSP and CRP” at Marintek/Norway
General
Our customer Østensjø Rederi ASfrom Norway carried out calm watertests with two models of an 85.5 mlong PSV (Platform Supply Vessel),to compare two different propulsionsystems. Test no. 601956.00.01 was carried out with Voith Schneiderpropulsion (Fig. 7), while test no.601956.00.02 was carried out withcontra-rotating propellers (CRP)(Fig. 8).
The conditions for this comparison,for example the major dimensions,required ship performance, operat-ing conditions, as well as the fuelconsumption of specific engineswere identical.
This allowed a very accurate com-parison of the propulsion systemsas such.
Although the two vessels have verysimilar dimensions, the aft ship linesdiffer from each other, due to thespecial requirements of the pro-pellers.
The vessels were required toachieve 15 kn speed on two drafts,5.2 m and 6.0 m.
The model test showed clearly thatthe Voith Schneider Propeller is anideal propulsion system for offshoresupply vessels.
In addition to the absolute trust ofmany of our customers in the life-cycle, lifecycle costs, safety andunbeatable manoeuvrability of ourpropulsion system, these tests alsoproved the superiority in propulsionefficiency even in comparison tocontra-rotating Z-drives.
Fig. 8: Position of CRP in the stern of thePSV model
Fig. 7: Position of VSP in the stern of thePSV model. Propulsion: VSP size 32 R5
This document, and more, is available for download at Martin's Marine Engineering Page - www.dieselduck.net
Power Effective PE Draught 5.2 / 6.0 m
0
500
1,000
1,500
2,000
12.0 12.5 13.0 13.5 14.0 14.5 15.0speed [kn]
po
wer
[kW
]
CRP 5.2 mVSP 5.2 mVSP 6.0 mCRP 6.0 m
CRPVSP
Brake Power PB Draught 5.2 m
0
500
1,000
1,500
2,000
2,500
3,000
12.0 12.5 13.0 13.5 14.0 14.5 15.0speed [kn]
pow
er [
kW]
CRPVSP
Brake Power PB Draught 6.0 m
speed [kn]
pow
er [
kW]
0
500
1,000
1,500
2,000
2,500
3,000
3,500
12.0 12.5 13.0 13.5 14.0 14.5 15.0
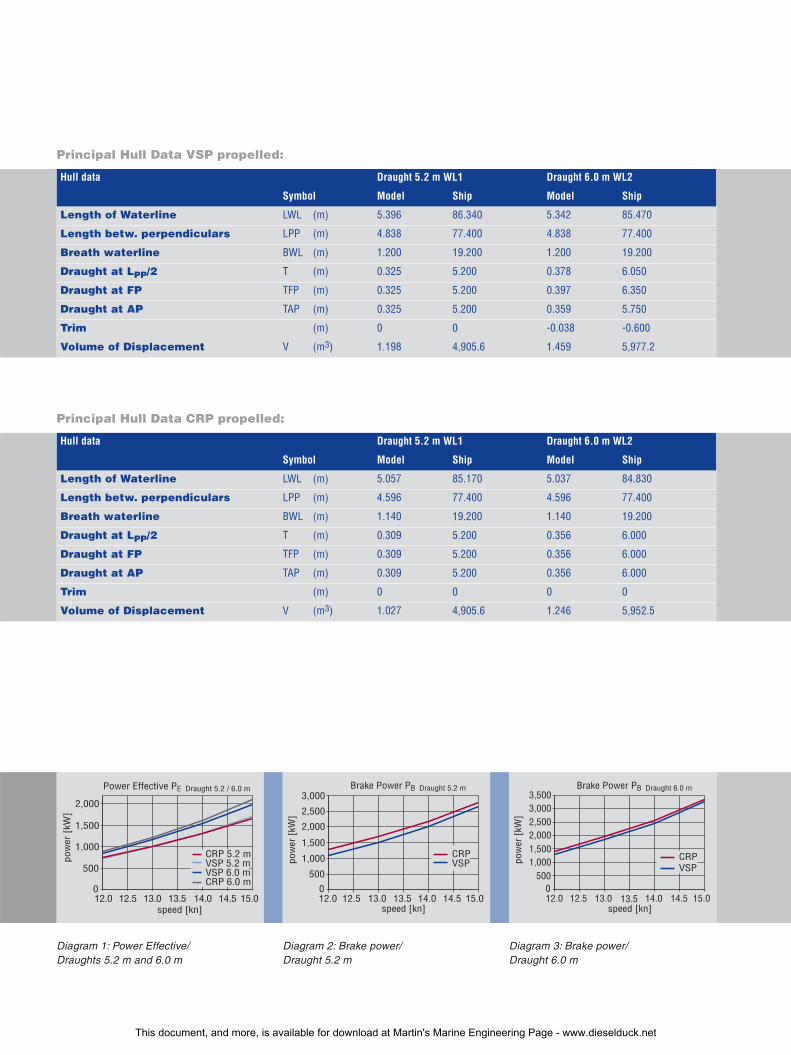
Diagram 1: Power Effective/Draughts 5.2 m and 6.0 m
Diagram 2: Brake power/ Draught 5.2 m
Diagram 3: Brake power/ Draught 6.0 m
Hull data
Length of Waterline
Length betw. perpendiculars
Breath waterline
Draught at LPP/2
Draught at FP
Draught at AP
Trim
Volume of Displacement
Draught 5.2 m WL1 Draught 6.0 m WL2
Symbol
LWL (m)
LPP (m)
BWL (m)
T (m)
TFP (m)
TAP (m)
(m)
V (m3)
Model
5.057
4.596
1.140
0.309
0.309
0.309
0
1.027
Ship
85.170
77.400
19.200
5.200
5.200
5.200
0
4,905.6
Principal Hull Data CRP propelled:
Model
5.037
4.596
1.140
0.356
0.356
0.356
0
1.246
Ship
84.830
77.400
19.200
6.000
6.000
6.000
0
5,952.5
Hull data
Length of Waterline
Length betw. perpendiculars
Breath waterline
Draught at LPP/2
Draught at FP
Draught at AP
Trim
Volume of Displacement
Draught 5.2 m WL1 Draught 6.0 m WL2
Symbol
LWL (m)
LPP (m)
BWL (m)
T (m)
TFP (m)
TAP (m)
(m)
V (m3)
Model
5.396
4.838
1.200
0.325
0.325
0.325
0
1.198
Ship
86.340
77.400
19.200
5.200
5.200
5.200
0
4,905.6
Principal Hull Data VSP propelled:
Model
5.342
4.838
1.200
0.378
0.397
0.359
-0.038
1.459
Ship
85.470
77.400
19.200
6.050
6.350
5.750
-0.600
5,977.2
This document, and more, is available for download at Martin's Marine Engineering Page - www.dieselduck.net

Ship Resistance:
To evaluate the different designs of the ship lines, a resistance testfor both drafts was performed. Theresult shows the values of PE (pow-er effective) which is the amount of power needed to tow the shipthrough the water at different speeds.
Diagram 1 shows that the effectivepower needed to tow the VSPdesigned ship lines is higher thanthat of the ship with CRP ship lines.
In the area that is most importantfor the customer – design speed of15 kn – the difference is 3 % at 5.2 m draught and 7 % at draught6.0 m. This result shows the valuesfor the ship resistance only, withoutthe propulsion systems.
This means, that there is room forfurther improvement of the VSPship lines. But this option was notconsidered in this first Marintekmodel test series.
Propulsion Test/
Performance Prediction
To evaluate the brake power (PB = effective engine power) toachieve the desired speed, apropulsion test/performance predic-tion was performed. The measuredpower applied was calculated forthe real ships.
Diagrams 2 and 3 show very goodresults for Voith Schneider Pro-pellers, since the required brakepower across the entire speedrange is lower than the CRP values.The CRP-propelled ship neededsome 8 % more brake power for thedesign speed.
Note: The PB for the VSP was lowercompared to the CRP (about 8 %)even when the ship resistance forthe chosen VSP hull form wasapproximately 3 to 7 % higher com-pared to the chosen hull form of theCRP vessel.
Diagram 4: Propulsive efficiency/ Draught 5.2 m
Diagram 5: Propulsive efficiency/ Draught 6.0 m
VSPCRP
speed [kn]
Propulsive efficiency Draught 5.2 m
0.50
0.55
0.60
0.65
0.70
0.75
0.80
12.0 12.5 13.0 13.5 14.0 14.5 15.0
prop
ulsi
ve e
ffic
ienc
y [.
..]
VSPCRP
speed [kn]
Propulsive efficiency Draught 6.0 m
0.50
0.55
0.60
0.65
0.70
0.75
0.80
12.0 12.5 13.0 13.5 14.0 14.5 15.0
prop
ulsi
ve e
ffic
ienc
y [.
..]
Propulsion Efficiency �D
The propulsion efficiencies �D ofthe different propeller systems areshown in diagrams 4 and 5.They demonstrate clearly that theVSP has a higher efficiency acrossthe entire speed range. This willresult in lower power requirementsand lower fuel consumption for theactual ship.
The wave picture on the designspeed is very homogenous (Fig. 9).
Fig. 9: Wave picture at 14 knots
67
This document, and more, is available for download at Martin's Marine Engineering Page - www.dieselduck.net

4. Model Testing “PSV with VSP, Optimization of Hull
Form and Slamming Testing” at SVA, Vienna/Austria
Fig. 10: Modified aft body with VSP installation Fig. 11: Modified aft body with VSP installation
During the second phase of the jointinvestigation program, additionalmodel tank tests were performed atSVA in Vienna, Austria. A newmodel was built at Vienna with thesame main dimensions testedbefore at Marintek (Fig. 10, 11).To validate the results of the newmodel with the former model atMarintek, a comparative measure-ment was performed at Viennaproving the results of Marintek.
To achieve an optimum sea-keepingbehaviour especially for slammingat zero speed with waves comingfrom the stern, the aft lines weremodified, using the same V-shapedaft body as previously applied forthe CRP hull at Marintek.
speed [kn]12.0 12.5 13.0 13.5 14.0 14.5 15.00
500
1,000
1,500
2,000
2,500
3,000
3,500
pow
er [
kW]
CRPVSP MarintekVSP Vienna
Diagram 6: Brake Power/Draught 5.20 m.SVA Vienna results for VSP in comparisonwith Marintek results for CRP solution
This document, and more, is available for download at Martin's Marine Engineering Page - www.dieselduck.net

The comparison of the brake powerfor the modified aft lines of the VSP hull with the investigated CRPversion at Marintek confirmed theearlier results and power savings.
The second test series performed at SVA in Vienna reconfirmed thepower savings achieved with theVSP compared to the CRP solutionthat had been tested at the first testtank series at Marintek. With themodified VSP aft body, even higherpower savings could be achievedfor the entire operating draughtspectrum, as well as the speed
range. The V-shape of the aft bodywill secure the desired slammingcharacteristics at zero speed withwaves coming from the stern, asalready examined at Marintek.
The slamming investigations per-formed at SVA revealed that peakpressures that were already rathersatisfactory can be reduced furtherwith the VSP (Diagram 9).
The reason of this reduction is thesuction effect of the VSP even atzero pitch.
Diagram 7: Brake Power/Draught 6.0 m.SVA Vienna results for VSP in comparisonwith Marintek results for CRP solution
Diagram 8: Power saving with VSP forboth draughts of 5.20 m and 6.0 m com-pared to the CRP solution over the entirespeed range
speed [kn]12.0 12.5 13.0 13.5 14.0 14.5 15.00
500
1,000
1,500
2,000
2,500
3,000
3,500
pow
er [
kW]
CRPVSP MarintekVSP Vienna
speed [kn]
diff
eren
ce [
%] WL 1
WL 2
Power difference (CRP-VSP) / VSP
-10
0
10
20
30
40
12.0 12.5 13.0 13.5 14.0 14.5 15.0
Diagram 9: Maximum slamming pressurewith and without operation of VSP (hw = 3.0 m, D = 5.2 m)
Load Cell
Pm
ax
0
0.2
0.4
0.6
1
1 2 3 4 5 6 7
VSP on
1.2
0.8
VSP off
89
This document, and more, is available for download at Martin's Marine Engineering Page - www.dieselduck.net
5. Roll Damping with Voith Schneider Propellers –
Calculation for a PSV
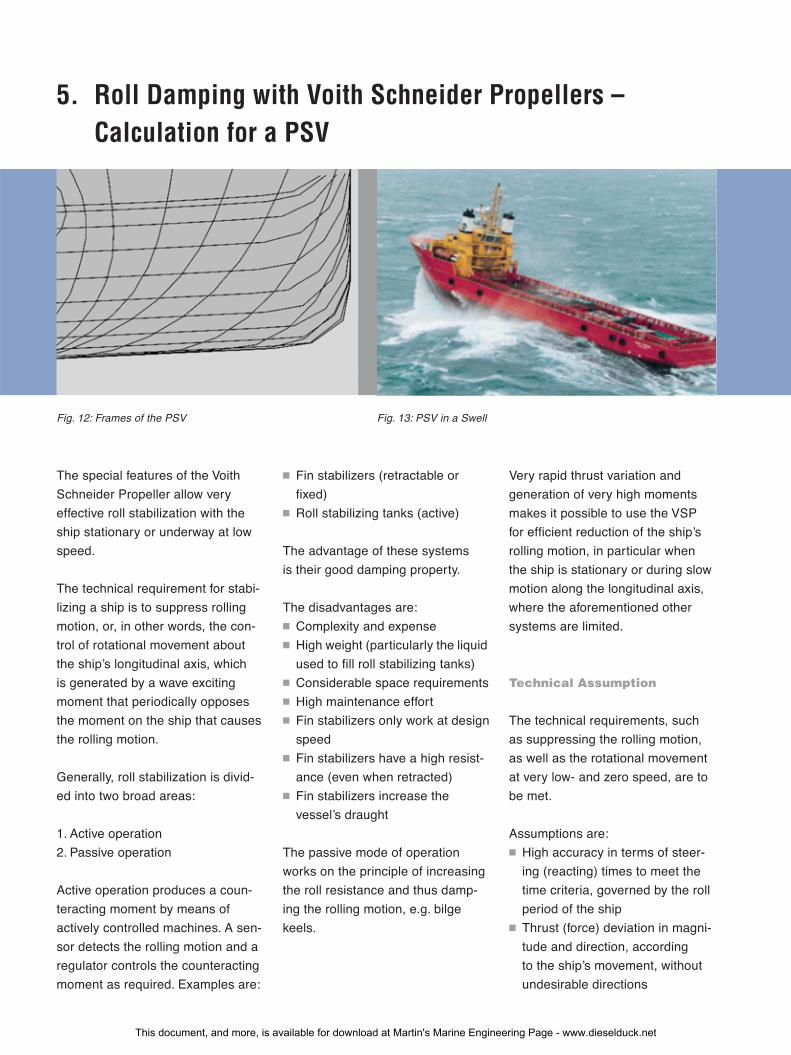
Fig. 12: Frames of the PSV Fig. 13: PSV in a Swell
The special features of the VoithSchneider Propeller allow veryeffective roll stabilization with theship stationary or underway at lowspeed.
The technical requirement for stabi-lizing a ship is to suppress rollingmotion, or, in other words, the con-trol of rotational movement aboutthe ship’s longitudinal axis, which is generated by a wave excitingmoment that periodically opposesthe moment on the ship that causesthe rolling motion.
Generally, roll stabilization is divid-ed into two broad areas:
1. Active operation2. Passive operation
Active operation produces a coun-teracting moment by means ofactively controlled machines. A sen-sor detects the rolling motion and aregulator controls the counteractingmoment as required. Examples are:
� Fin stabilizers (retractable orfixed)
� Roll stabilizing tanks (active)
The advantage of these systems is their good damping property.
The disadvantages are:� Complexity and expense� High weight (particularly the liquid
used to fill roll stabilizing tanks)� Considerable space requirements� High maintenance effort� Fin stabilizers only work at design
speed� Fin stabilizers have a high resist-
ance (even when retracted)� Fin stabilizers increase the
vessel’s draught
The passive mode of operationworks on the principle of increasingthe roll resistance and thus damp-ing the rolling motion, e.g. bilgekeels.
Very rapid thrust variation andgeneration of very high momentsmakes it possible to use the VSP for efficient reduction of the ship’srolling motion, in particular whenthe ship is stationary or during slowmotion along the longitudinal axis,where the aforementioned othersystems are limited.
Technical Assumption
The technical requirements, suchas suppressing the rolling motion, as well as the rotational movementat very low- and zero speed, are tobe met.
Assumptions are:� High accuracy in terms of steer-
ing (reacting) times to meet thetime criteria, governed by the rollperiod of the ship
� Thrust (force) deviation in magni-tude and direction, according to the ship’s movement, withoutundesirable directions
This document, and more, is available for download at Martin's Marine Engineering Page - www.dieselduck.net
1011
Objective
An investigation was conducted toprove whether the Voith Roll Stabi-lization (VRS) system can fulfill therequirements:
� Damping of the rolling motion of aship without forward motion
The damping produced by the Voith Schneider Propeller (VSP) is referred to as active damping.
Calculation for a PSV
Calculations were made by the TUHamburg, Prof. H. Soeding, in May2004 “Rolldämpfung mittels VoithSchneider-Technologie” (Roll Damp-ing with Voith Schneider Technology)based on the following dimensions:
Lpp = 77.4 m, Bwl = 19.2 m, D = 6.05 m, trim = 0.6 m.The meta-centric height on whichthe computation was basedamounted to GM = 1.3 m.
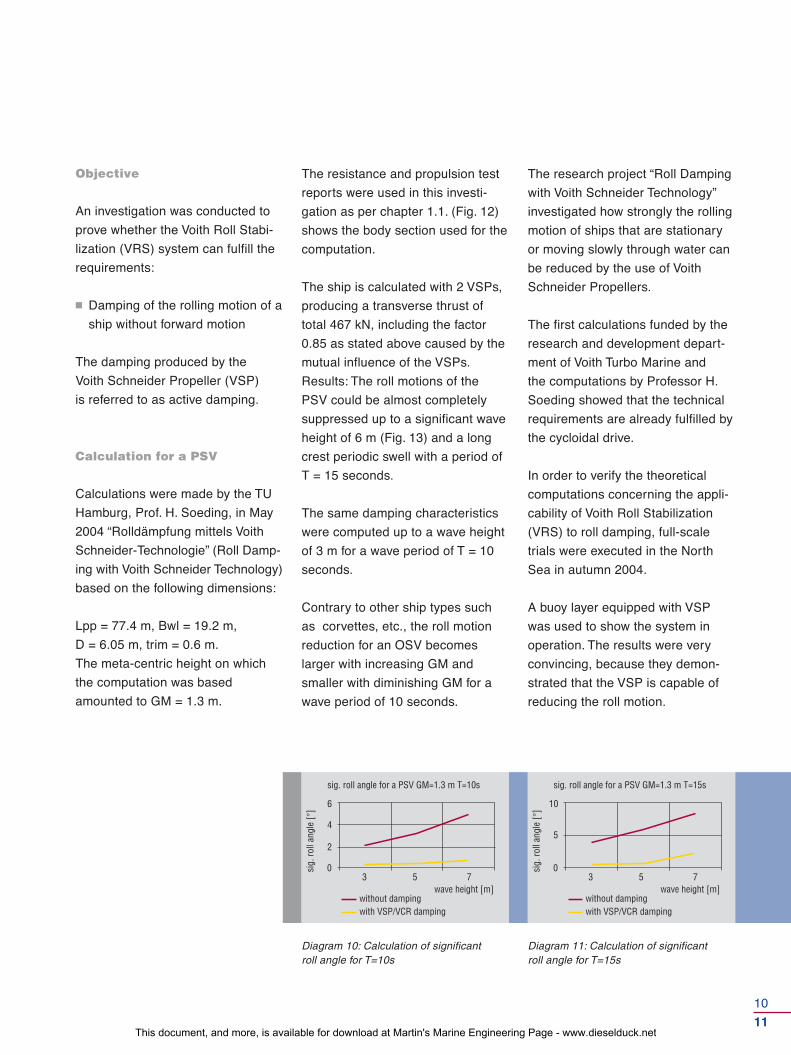
Diagram 10: Calculation of significant roll angle for T=10s
sig.
rol
l ang
le [°]
wave height [m]without damping
with VSP/VCR damping
sig. roll angle for a PSV GM=1.3 m T=10s
3 5 70
2
4
6
Diagram 11: Calculation of significant roll angle for T=15s
sig.
rol
l ang
le [°]
wave height [m]without damping
with VSP/VCR damping
sig. roll angle for a PSV GM=1.3 m T=15s
3 5 70
5
10
The resistance and propulsion testreports were used in this investi-gation as per chapter 1.1. (Fig. 12)shows the body section used for thecomputation.
The ship is calculated with 2 VSPs,producing a transverse thrust oftotal 467 kN, including the factor0.85 as stated above caused by themutual influence of the VSPs.Results: The roll motions of the PSV could be almost completelysuppressed up to a significant waveheight of 6 m (Fig. 13) and a longcrest periodic swell with a period ofT = 15 seconds.
The same damping characteristicswere computed up to a wave heightof 3 m for a wave period of T = 10seconds.
Contrary to other ship types suchas corvettes, etc., the roll motionreduction for an OSV becomeslarger with increasing GM andsmaller with diminishing GM for awave period of 10 seconds.
The research project “Roll Dampingwith Voith Schneider Technology”investigated how strongly the rollingmotion of ships that are stationaryor moving slowly through water canbe reduced by the use of VoithSchneider Propellers.
The first calculations funded by theresearch and development depart-ment of Voith Turbo Marine and the computations by Professor H.Soeding showed that the technicalrequirements are already fulfilled bythe cycloidal drive.
In order to verify the theoreticalcomputations concerning the appli-cability of Voith Roll Stabilization(VRS) to roll damping, full-scaletrials were executed in the NorthSea in autumn 2004.
A buoy layer equipped with VSPwas used to show the system inoperation. The results were veryconvincing, because they demon-strated that the VSP is capable ofreducing the roll motion.
This document, and more, is available for download at Martin's Marine Engineering Page - www.dieselduck.net

13
6. Dynamic Positioning with Voith Schneider Propellers
In the past only specialized vessels,such as dive support, constructionsupport and survey vessels, werefitted with dynamic positioning sys-tems. These vessel types wererequired to maintain their positionand head within very strict para-meters. Automatic heading andposition control systems werehence essential for safe operation.
The new roles for standard PlatformSupply Vessels now require that thevessels can be positioned with ahigher degree of accuracy, and areable to maintain their position forextended periods of time. Mostnewly built PSV are therefore fittedwith dynamic position systems asstandard, exceptions are rare.
The following section provides anoverview of DP operation and theadvantages of Voith SchneiderPropellers for dynamic positioning.
At its very basic concept, dynamicpositioning is a system that is uti-lized to maintain a vessel in a des-ignated position and/or with a desig-nated heading in order to provide astable platform for different tasks.
Any vessel has 6 freedoms of move-ment, named yaw, surge, sway,heave, pitch and roll. The heave,pitch and roll of the vessel cannotbe controlled by a DP system(these movements belong to thesea-keeping behaviour of the ship).
The function of the DP system is tocontrol automatically the yaw, surgeand sway, and therefore maintainthe vessel in the desired location ormaintain the required headingcontrol.
� Yaw: The change of heading dueto the vessel’s rotation about thevertical axis
� Sway: The vessel’s movement inthe transverse direction (sidestepping)
� Surge: Vessel’s movement in thefore and aft direction
A DP system is used to maintainthese movements and rotation invery strict parameters. It is thereforeimportant to have a propulsionsystem with an overall outstandingperformance. The propulsion sys-tem has to meet the followingrequirements:
� Thrust and efficiency are identicalin all directions
� Extremely fast and precise thrustchanges
� Stepless control of thrust inmagnitude and direction accord-ing to X and Y coordinates. Thrustcontrol has to correspond withthe ship’s main axis
The above mentioned requirementsare fulfilled by the concept of VoithSchneider Propellers. Quick andprecise steering, long service life,high availability and fast stopping,as well as high acceleration proper-ties make the VSP propulsion sys-tem a perfect partner for DP opera-tion.
The above arguments are the rea-son for efficient dynamic positioningunder extremely hard weatherconditions!
Fig. 15: The 3 m blade of a VSP for a PSVFig. 14: Voith Schneider Propeller
This document, and more, is available for download at Martin's Marine Engineering Page - www.dieselduck.net

7. Conclusion/Summary
The comprehensive joint investiga-tion programs performed by Østen-sjø Rederi AS and Voith TurboMarine at Marintek and SVA Viennahave proven the excellent propul-sion efficiency of the VSP solutionacross the entire operation draughtrange, as well as the speed range.
Under consideration of the opera-tion spectrum of an OSV, consider-able fuel savings are possible.
Additionally, the excellent sea keep-ing behaviour of the VSP wasproven and documented alongsidethe renowned and proven advan-tages of the VSP in terms of:
� Redundancy� Controllability� Fast and extremely precise thrust
control for DP mode� Long lifetime and very low down-
times� Automatically built-in c.p. charac-
teristic allowing optimum adapta-tion of the entire power train tothe different operation modes
The function of roll stabilization canbe offered for OSV applications. Asa result, the performance of modernOSVs improves significantly.
This document, and more, is available for download at Martin's Marine Engineering Page - www.dieselduck.net
G 1
953
e 06
.06
3000
MSW
/WA
Dim
ensi
ons
and
illust
ratio
ns w
ithou
t obl
igat
ion.
Subj
ect t
o m
odifi
catio
ns.
Voith Turbo Marine GmbH & Co. KGP.O. Box 201189510 Heidenheim, GermanyTel. +49 7321 37-6595Fax +49 7321 [email protected]/marine
This document, and more, is available for download at Martin's Marine Engineering Page - www.dieselduck.net