Ömer korçak-efficient integration of haps and mobile satellites via free-space optical links
TRANSCRIPT

8/12/2019 Ömer Korçak-Efficient Integration of HAPs and Mobile Satellites via Free-space Optical Links
http://slidepdf.com/reader/full/oemer-korcak-efficient-integration-of-haps-and-mobile-satellites-via-free-space 1/12

8/12/2019 Ömer Korçak-Efficient Integration of HAPs and Mobile Satellites via Free-space Optical Links
http://slidepdf.com/reader/full/oemer-korcak-efficient-integration-of-haps-and-mobile-satellites-via-free-space 2/12
Geostationary Earth Orbit (GEO) satellite layers are pre-sented in several works [1–4]. In these architectures, HAPsact as relay stations to aggregate and forward traffic re-ceived from the ground user terminals to the GEO satellite.GEO satellites are advantageous for their large coverageareas and static position with respect to the Earth, but theysuffer from long propagation delays and high free-spaceattenuation. Optical links from HAPs to GEOs have lesscapacity (comparing to lower orbiting satellites) due tolong distances [5], and long propagation delay is not suit-able for real-time and interactive applications. Low EarthOrbit (LEO) and Medium Earth Orbit (MEO) satellites offermuch less propagation delays compared to GEO satellitesand are attractive option for routing dense and real-timetraffic [6]. Therefore they are more suitable for emerginghigh data-rate and real-time applications. The most impor-tant challenge with the low orbiting satellites is theirmobility with respect to the Earth, which complicatesinternetworking between these satellites and static nodes.Therefore, it is necessary to come up with solution ap-proaches for this internetworking problem in physicallayer and upper layers. In the literature, there are severalstudies that deal with internetworking between HAPsand LEO or MEO satellites. Most of these studies deal withphysical layer issues such as fast pointing acquisition andtracking, handling the effect of the Doppler shift, opticaltransmitter design, etc. [7,8]. To the best of our knowledge,there is almost no work that deals with resource manage-ment and routing issues related to upper layers. [9] focuseson routing VoIP traffic in a multilayered architecture withGEO satellites acting as the backbone routers, LEO satellitesas the second layer and HAPs deployed in specific local re-gions. They simplify the mobility of the LEO layer byassuming that the physical LEO satellite network can be re-duced to a fixed logical topology. As the authors indicate,this assumption is valid for the satellite systems withEarth-fixed footprints [10]. However this is impractical inmost satellite systems, and mobility of the satellites shouldbe handled in more realistic ways.
In this paper, we consider internetworking betweenHAPs and non-GEO satellites without discarding the mobil-ity of satellites. HAPs and satellites communicate via highcapacity free-space optical links. Each satellite can servemultiple HAPs and a HAP can have a line of sight with mul-tiple satellites. Deciding on which satellite(s) to establishan optical link is an important issue. For instance, if thecapabilities of the system allow single satellite to commu-nicate with any HAP, the one with the higher elevation an-gle is the most appealing. This is because the higher theelevation angle, the shorter is the link distance throughthe atmosphere. This leads to a reduced free space loss, asmaller atmospheric loss due to absorption and scattering,less background noise due to blue sky, and less fading.However, if we always make the HAP to communicate withthe satellite with the highest elevation angle, link durationtimes will get shorter and switching (which is an expensivetask) between HAPs and satellites occurs more frequently.Furthermore, number of optical receivers/transmitters insatellites is limited and this causes another constraint on
the problem of linking satellites with HAPs. We considerall of the issues raised above and study on optimal
matching of HAPs and satellites considering the movementof satellites and self-rotation of the Earth.
The rest of this paperis organized as follows. In Section 2,we describe the system architecture and give mathematicalformulasfor visibilityconditions,elevationangles andtime-dependent locations of mobile satellites. Thenwe formulatethe optimal link establishment problem after defining sys-tem constraints and objectives in Section 3. We also give apolynomial-timeoptimizationalgorithm forsolving thefor-mulatedproblem. Section4 exhibitsnumericalresults of theoptimizationalgorithmperformed for givenintegrated net-work scenarios, and Section 5 concludes this work.
2. System overview
2.1. System architecture
We consider a system with three layers: ground layer,HAP layer and satellite layer. HAPs are located over sensi-tive and strategic areas, and receive and generate largeamount of data. They transmit data to low or mediumorbiting satellites which act as relay nodes to transfer datatowards terrestrial gateways (GW). If the correspondingGWs are far away from HAPs, data could be sent over mul-tiple satellite relays using inter-satellite links. The systemarchitecture is shown in Fig. 1. Due to the global coverageof satellites, this architecture enables world-wide highcapacity and real-time networking.
HAPs and satellites communicate via free-space opticallinks. Free-space optical links have highly directive beamswith very small divergence angles due to the short (near-infrared) wavelength. As a result optical systems are extre-mely power efficient than microwave (MW) communica-tions systems over long distances and allow data rates of several Gbps. Even faster data links would be feasible inthe near future deploying methods like Wavelength Divi-sion Multiplexing (WDM). Optical links offer significantlyhigher bandwidth, however they are blocked by clouds.This does not impose a problem between HAPs and satel-lites because HAPs are located above the cloud layer. How-ever, optical downlinks from satellites to GWs have limitedavailability depending on the cloud situations. Since al-most hundred percent availability is required for mostreal-time applications, using optical link from satellite toGW is not feasible. On the other hand, MW communicationsystems are inhibited by spectrum restrictions, manage-able antenna sizes, and available transmit power. There-fore for increasing downlink capacity, [5] proposed to useHAP relays between satellite and ground stations. Satellitetransmits data to HAP via high-capacity optical link whichis not hindered by clouds. The final ‘‘last mile’’ to the ter-restrial GW could then be bridged by a standard point-to-point MW link as used today in terrestrial applications,but with a large bandwidth compared to a satellite link dueto the short distance. In cloud-free conditions, a paralleloptical link can be utilized to increase the bandwidth be-tween HAP and GW as shown in Fig. 1. Moreover, a net-work of HAP interconnected with optical links can
eliminate the cloud blockage problem by providing opticalHAP-ground links at different geographic locations.
Ö. Korçak, F. Alagöz / Computer Networks 55 (2011) 2942–2953 2943

8/12/2019 Ömer Korçak-Efficient Integration of HAPs and Mobile Satellites via Free-space Optical Links
http://slidepdf.com/reader/full/oemer-korcak-efficient-integration-of-haps-and-mobile-satellites-via-free-space 3/12
In this paper, we leave details of downlinks from satel-lites to GWs and will focus on establishment of opticallinks between HAPs serving for sensitive areas and mobilesatellites. Each satellite can communicate with multiple
HAPs, and each HAP can have a line-of-sight with multiplesatellites. However, maintaining an optical link between asatellite and a HAP is a power consuming task. Since re-sources are restricted in satellites, there is an upper limitfor number of HAPs to serve. Moreover, visibility condi-tions and elevation angles between satellites and HAPscontinuously change due to mobility of satellites. There-fore, optimal matching of HAPs and satellites is a crucial is-sue, which will yield maximization of system availabilityand performance.
2.2. System geometry
Fig. 2 illustrates two-dimensional view of the consid-ered system. There are three layers: terrestrial layer, HAPlayer and satellite layer. A HAP H is said to be visible to asatellite S if the elevation angle between them exceedsminimum elevation angle (emin). This implies that it is pos-sible to establish an optical link between a HAP and a satel-lite only if b does not exceed d.
Applying the law of sines to sides OA and OS
sinð90 emin dÞ
RE þ hH ¼
sinð90 þ eminÞ
RE þ hS
; ð1Þ
where RE is the radius of the Earth (6375 km), hH is the
height of the HAP, and hS is the height of the satellite.Extracting d from Eq. (1), we get
d ¼ 90 emin arcsin RE þ hH
RE þ hS
cosðeminÞ
: ð2Þ
In Fig. 2, S 0 is the projection point of the satellite S on theHAP layer. OS’H is an isosceles triangle, and again by usinglaw of sines, b is found to be
b ¼ 2 arcsin
jS 0H j
2 ðRE þ hH Þ
: ð3Þ
Sensitive Area
Sensitive Area
Sensitive Area
GW
Satellite
Inter-satellite link
HAP - Satellite
optical links
MW
links
optical
link
HAP
FibreNetworks
GW
Fibre
Networks
Fig. 1. System architecture.
Satellite Layer
HAP Layer
S
H
S’ A
O
εmin
δ β
Terrestrial
Layer
εSH
Fig. 2. Two dimensional view of the system geometry.
2944 Ö. Korçak, F. Alagöz / Computer Networks 55 (2011) 2942–2953

8/12/2019 Ömer Korçak-Efficient Integration of HAPs and Mobile Satellites via Free-space Optical Links
http://slidepdf.com/reader/full/oemer-korcak-efficient-integration-of-haps-and-mobile-satellites-via-free-space 4/12
It is possible to establish an optical link between a satel-lite and a HAP while b 6 d. b angle for a satellite-HAP paircontinuously changes due to the movement of the satel-lites. For each time unit, we prepare a visibility matrix thatrepresents which HAPs are visible to which satellites,based on the exact positions of the satellite and HAPs.
At a given time, the elevation angle between a satellite S and a HAP H (e
SH ) is
eSH ¼ arctan 1
sinðbÞ cosðbÞ
RE þ hH RE þ hS
; ð4Þ
which is derived by applying law of sines to OH and OSsides of the OSH triangle.
Obviously, b and eSH values are dependent on the loca-tions of satellites and HAPs. Locations of HAPs are consid-ered to be static, but this is not the case for satellites. Now,we are going to model the mobility of the satellite network.
Let us consider a regular satellite network with totalnumber of N = N P N S satellites where N P is the numberof planes and N
S is the number of satellites per plane. A sa-
tellite is denoted by S p,s, where p = 1. . .N P , s = 1. . .N S . Loca-tion of S p,s at time t is represented by (k p,s(t ),/ p,s(t ))where k p,s(t ) is it’s latitude value and / p,s(t ) is it’s longitudevalue at time t . Assuming that location of S 1,1 at initial timet 0 = 0 is (0, 0), locationof a satellite in plane 1 at any giventime t can be found as following:
k1; jðt Þ ¼ arcsinðsinl sinaÞ;
u1; jðt Þ ¼
360k1 þ arccosðcosl= cosðk1; jðt ÞÞÞ xE t ;
if k1; jðt ÞP 0;
360k2 arccosðcosl= cosðk1; jðt ÞÞÞ xE t ;
if k1; jðt Þ < 0;
8>>><
>>>: ð5Þ
where l = xS t + ( j 1) Dk with xS is the angular speed of a satellite, and Dk = 360/N S ; a is the inclination angle of thesatellite orbit; xE is the angular speed of the Earth; k1 andk2 are appropriate integers that satisfy 180
6u1, j
6 180.Longitude and latitudes of the satellites on other planes
can be determined with respect to the satellites in the firstplane
ki; jðt Þ ¼ k1; jðt þ ði 1Þ Dt Þ;
ui; jðt Þ ¼ u1; jðt þ ði 1Þ Dt Þ þ ði 1Þ ðDuþxE Dt Þ þ 360k; ð6Þ
where Du = 180/N P for p-constellations, and Du = 360/N P
for 2p-constellations; Dt = T sat (D//360) where T sat is therotation period of satellites, and D/ is the phase difference(in terms of degrees) between adjacent orbits; and k is anappropriate integer that satisfies 180
6ui, j 6 180.
3. Optimal link establishment
In this paper, we focus on establishment of optical links
between HAPs and satellites. Our main constraints are thefollowing:
(1) A satellite and a HAP should have line of sight inorder to communicate with each other. This impliesthat elevation angle between a HAP and a satelliteshould exceed emin.
(2) Number of optical transmitters/receivers in satel-lites is limited. In other words, a satellite i can servemaximum of H imax HAPs.
(3) In this work, we consider one-to-many relationbetween HAPs and satellites. In other words, foreach HAP, we consider establishing link with a singlesatellite.
We should note that satellite i requires increased sizeand complexity in order to support large H imax value. Inthe current state of the art, large values of H imax may notbe feasible. However, due to the continuing increase inthe optical communications, physical implementationcomplexity may be resolved in the next generation inte-grated satellites and we do not discard the cases with largeH imax values.
Our aim is to match the satellites and HAPs in such away that:
(1) Above constraints should be satisfied.(2) As much HAP as possible should be served. In other
words, utilization of the HAPs1 (U H ) should be maxi-mized. It should be 1 if it is possible. Utilization at agiven time t is represented by U
t
H .
(3) Average of the elevation angles ( Aavg ) between satel-lites and HAPs will be maximized. Aavg at a giventime t is represented by At
av g .
Note that, our most important goal is to maximize U H
(to serve as much HAP as possible). Among the satellite-HAP matchings that maximizes U H , the best matching isthe one that maximizes Aavg .
3.1. Problem formulation
Suppose that our considered system includes N satel-lites and M HAPs. Firstly, we will define three matrices thatrepresent relationship between these satellites and HAPsin a given time unit t .
(1) V t N M is the visibility matrix. IfHAP j is visible to satel-
lite i, then V t [i][ j] = 1, otherwise V t [i][ j] = 0. Visibilitymatrix is filled according to the relationshipbetween b andd as described in the previous section.
(2) EAt N M is the matrix of elevation angles. If V t [i][ j] = 1 ,
then EAt [i][ j] stores the elevation angle betweensatellite i and HAP j. It is calculated by Eq. (4). If V t [i][ j] = 0, then EAt [i][ j] is set to a constant numberR. We set R to a large negative number (such as10,000).
1
Utilization of the HAPs is calculated as ratio of the number of servedHAPs to the total number of HAPs.
Ö. Korçak, F. Alagöz / Computer Networks 55 (2011) 2942–2953 2945

8/12/2019 Ömer Korçak-Efficient Integration of HAPs and Mobile Satellites via Free-space Optical Links
http://slidepdf.com/reader/full/oemer-korcak-efficient-integration-of-haps-and-mobile-satellites-via-free-space 5/12
(3) Et N M is the existency matrix. If optical link between
satellite i and HAP j exists, then Et [i][ j] = 1, otherwiseEt [i][ j] = 0 .
Now, optimal link establishment problem can be formu-lated as following:
max Xi; j
E t ½i½ j EAt ½i½ j ð7Þ
subject toX j
E t ½i½ j 6 H imax; 8i; ð8Þ
Xi
E t ½i½ j ¼ 1; 8 j: ð9Þ
The objective is to match HAPs and satellites at a giventime t such that sum of elevation angles for the connectedHAP-satellite pairs is maximized. First constraint ensuresthat a satellite i can serve maximum of H imax HAPs. Secondconstraint implies that each HAP is matched to a singlesatellite.
In the above problem formulation, Et N M is the only var-
iable. Hence, the formulated problem is a binary integerlinear programming (ILP) problem. Performing the optimi-zation, we obtain the optimal Et values. According to (9),every HAP is matched with a satellite. However, some of the HAPs may not be able to be served due to resourcerestrictions. In that case, the above ILP forces them tomatch with a satellite that is not visible to it (which we callvoid matching ). Therefore, we should update the Et values.A HAP j is said to be not served by any satellites, if forany i, Et [i][ j] = 1, but V t [i][ j] = 0. Therefore, we perform thefollowing operation to the obtained Et values:
E t E t V t : ð10Þ
This operation nullifies void matchings obtained by theabove ILP. After performing (10), total number of servedHAPs (M S ) can be found as:
M S ¼Xi; j
E t ½i½ j: ð11Þ
Hence, U t H can be calculated as:
U t H ¼ M S M
¼
Pi; jE
t ½i½ j
M : ð12Þ
As we mentioned before, our primary goal is to maxi-mize the utilization. Note that the number of unserved
HAPs (M U ) is equal to the number of void matchings.Therefore, maximizing U t H implies minimizing the number
of void matchings. In our problem formulation, this goal isachieved by setting R to a large negative number. Recallthat, for void matching between satellite i and HAP j,V t [i][ j] = 0 and therefore EAt [i][ j] is equal to R. Hence, theobjective function (7) is equivalent to:
max EAt SUM þ M U R; ð13Þ
where EAt SUM represents the sum of elevation angles for va-
lid satellite-HAP matchings. Since R is a large negativenumber, it is apparent that our ILP formulation involves
minimization of M U value (in other words maximizationof U H value).
M U R is equal for all possible matchings with the sameU t
H value. Therefore, the objective function (13) also im-plies our second goal, that is the maximization of EAt
SUM
(hence At av g value) among the satellite-HAP matchings that
maximize U t H . Note that At
av g value can be found as
At av g ¼
EAt SUM
M S : ð14Þ
At this point, we proved that the above problem formu-lation is fully appropriate for the optimal establishment of the optical links between HAPs and satellites. Now let usfocus on the solution approach for the optimization prob-lem. As we mentioned above, the problem formulation isa binary ILP problem. Binary ILP problems can be solvedby some sort of optimization algorithms such as branchand bound algorithms. However, these algorithms haveexponential time complexity, and applying them may re-sult in excessively long time, especially for systems withlarge number of HAPs and satellites. Therefore, we comeup with a solution approach with polynomial time com-
plexity. In the next sub-section, we explain the details of the proposed solution approach.
3.2. Polynomial-time solution approach
We represent the integrated HAP-satellite system as abipartite graph G = (V S ,V H ,E) whose vertices can be dividedinto two disjoint sets V S and V H . V S includes H imax nodes forevery satellite i (16 i 6 N ), and V H includes single node perHAP. Nodes in the set V S are represented by S i,h (where16 i6 N , 1 6 h 6 H imax and S i,h is the hth node for satellitei), and the nodes in the set V H are represented by H j (where16 j 6M , and H j corresponds to HAP j). At a given time t , if
V t
[i][ j] = 1, i.e. if satellite i and HAP j are visible to eachother, then there exists an edge between H j and every nodecorresponding to satellite i (S i,1, S i,2, . . .,S i,Hmax). The weightof each link is equal to EAt [i][ j] as shown in Fig. 3. If V t [i][ j] = 0, then H j does not linked to any of the nodes cor-responding to satellite i. Fig. 4 illustrates the correspondingbipartite graph G for a small sample system with four HAPsand two satellites with H max = 2. In this example, HAP 2 isvisible to both satellites, and the other HAPs are visible to asingle satellite. Weights of the edges correspond to the an-gles of elevations between HAPs and satellites.
Now, the formulated optimal link establishmentproblem is identical to the maximum-weighted
Si,2 Si,3Si,1 Si,H max
H j H j+1
Satellite i
Weight = EA[i][j]
H j-1
V S
E
V H
Fig. 3. Bipartite graph representation of the system.
2946 Ö. Korçak, F. Alagöz / Computer Networks 55 (2011) 2942–2953

8/12/2019 Ömer Korçak-Efficient Integration of HAPs and Mobile Satellites via Free-space Optical Links
http://slidepdf.com/reader/full/oemer-korcak-efficient-integration-of-haps-and-mobile-satellites-via-free-space 6/12
maximum-cardinality (MWMC) matching in the constructedbipartite graph. In the mathematical discipline of graphtheory, matching in a graph is defined as a subset of edges,such that no two edges share a common node. Maximum-cardinality matching is a matching with maximum numberof edges. MWMC matching is a maximum cardinalitymatching such that the sum of the weights of the edgesin the matching is maximum. In Fig. 4, thick edges com-pose MWMC matching in the corresponding bipartitegraph.
MWMC matching in the constructed bipartite graphsatisfies all of the constraints and aims of the optimal linkestablishment problem. A satellite i can be assigned tomaximum number of H imax HAPs, and a HAP can bematched with a single satellite, since there are H imax nodesfor each satellite, a single node for each HAP, and no twoedge can share a common node. Maximum possible utiliza-tion of HAPs (U H ) is achieved in the resulting matching,since it is a ‘‘maximum-cardinality matching’’, i.e. match-ing with maximum number of edges. Aavg value is alsomaximized, because sum of the weights of the edges inthe matching is maximum.
In this section, we give a solution approach for MWMCmatching problem based on the Hungarian Algorithm thatis first developed by Kuhn [11]. Hungarian algorithm is aneffective polynomial-time combinatorial optimizationalgorithm for solving linear assignment problem which isdefined as finding maximum-weighted matching in a bal-anced and complete bipartite graph. The algorithm findsa perfect matching, where each node in one partition ismatched with exactly one node in the other partition, suchthat the sum of the weights of the edges in the matching ismaximum. With the improving modifications applied to itsinitial version, it is proved that Hungarian algorithm hasO(jV j3) time complexity in worst-case, where jV j is thenumber of vertices [12].
Before applying the Hungarian algorithm, we shouldmodify our bipartite graph G to a balanced and completebipartite graph. Note that G is not complete, because thereis no edge between H j and nodes corresponding to satellitei, if HAP j and satellite i are not visible to each other. There-fore, we insert those missing edges and set their weights toR
, which is a large negative number as defined in theprevious section. The resulting graph is complete, but it
is still not balanced, i.e. size of V S is not equal to size of V H . Therefore we introduce kV S j jV H k dummy nodes tomake the graph balanced. We add dummy edges fromthese nodes to each node in the other partition and settheir weights again to R. In the resulting bipartite graph,we run the Hungarian algorithm and find the maximumweighted perfect matching. Excluding all dummy edgesfrom the resulting matching, we get a MWMC matching.In the resulting MWMC matching, if a node correspondingto satellite i is matched to a node corresponding to HAP j,then we set Et [i][ j] to one. The resulting Et matrix is identi-cal to the output of the ILP formulated in the previous sub-section. (Note that (10) is already performed and voidmatchings are already nullified by excluding dummyedges). Thus, we obtain optimal assignment of optical linksthat maximizes U H , as well as Aavg .
3.3. Overall optimization
Up to now, we consider the optimal matching issue for a
given time t . However, since the satellites are mobile, con-nectivity conditions and elevation angle values betweenHAPs and satellites change with time. Therefore, optimalmatching will change as time changes, and the optimiza-tion algorithm should be applied repeatedly in both peri-odic manner (every Dt time units) and event-drivenmanner (when a link between a satellite and a HAP be-comes obsolete, or a new HAP is joined to the system).
Note that satellite network topology is periodic, that is,it repeats itself within a known period. If the rotation per-iod of satellites is T sat , then the whole system period isfound as
T S ¼ lcmðT sat ; T E Þ; ð15Þ
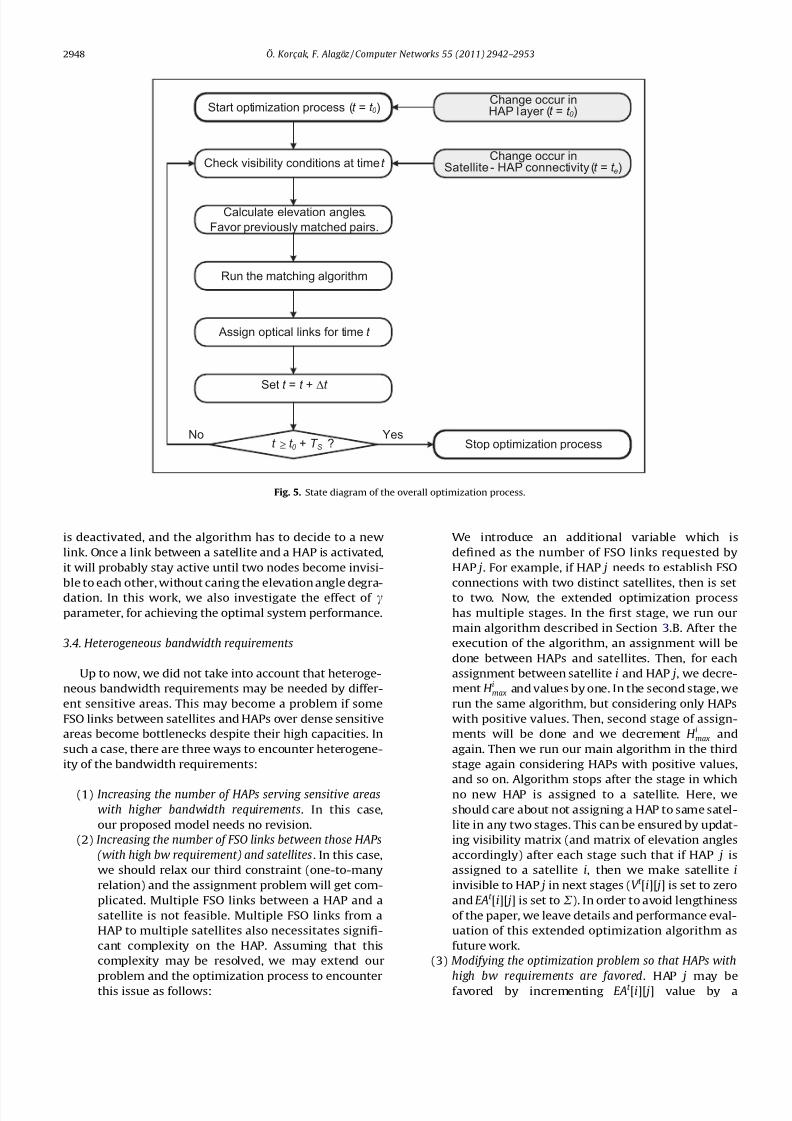
where T E is the self-rotation period of the Earth, which is24 h. As long as HAP layer does not change, the whole sys-tem will repeat itself at each T S time duration. Therefore,applying the optimization algorithm for a system period(T S ) will be enough as long as HAP layer remains static. If any HAP is removed from the system, joined to the system,or relocated, optimization process should be restarted. Theoverall optimization process is illustrated in Fig. 5.
While applying the optimization algorithm, we shouldalso consider link duration times. Switching of someHAP-satellite links may result in small gain in Aavg valuefor a short time, but this gain may not compensate cost
of the switching operation. Therefore, it is better to avoidestablishment of links with a small duration, while aimingto maximize elevation angles. For this purpose, we proposeto favor existing links in the optimization algorithm.
Consider that t 1 and t 2 are consecutive time instances. If a link exists between satellite i and HAP j at time t 1 then weincrement EAt 2 ½i½ j value by a particular amount c whileapplying the optimization algorithm for t 2:
if E t 1 ½i½ j ¼ 1; then EAt 2 ½i½ j EA
t 2 ½i½ j þ c: ð16Þ
c value should be assigned appropriately. If c is set tozero, then the optimization algorithm ignores link durationtimes, and aims to maximize Aavg . On the other hand, if c is
set to a large value (such as 90), then elevation angle isconsidered only when a link between a HAP and satellite
50604070 30
S1,1 S1,2 S 2,1 S 2,2
H 1 H 2 H 3 H 4
Satellite 1 Satellite 2
N = 2 M = 4
H max=2
EA[1][1]=70
EA[1][2]=30 EA[2][2]=40
EA[2][3]=60
EA[2][4]=50
Fig. 4. Bipartite graph representation of a small sample system with twosatellites and four HAPs.
Ö. Korçak, F. Alagöz / Computer Networks 55 (2011) 2942–2953 2947
8/12/2019 Ömer Korçak-Efficient Integration of HAPs and Mobile Satellites via Free-space Optical Links
http://slidepdf.com/reader/full/oemer-korcak-efficient-integration-of-haps-and-mobile-satellites-via-free-space 7/12
is deactivated, and the algorithm has to decide to a newlink. Once a link between a satellite and a HAP is activated,it will probably stay active until two nodes become invisi-ble to each other, without caring the elevation angle degra-dation. In this work, we also investigate the effect of cparameter, for achieving the optimal system performance.
3.4. Heterogeneous bandwidth requirements
Up to now, we did not take into account that heteroge-neous bandwidth requirements may be needed by differ-ent sensitive areas. This may become a problem if someFSO links between satellites and HAPs over dense sensitiveareas become bottlenecks despite their high capacities. Insuch a case, there are three ways to encounter heterogene-ity of the bandwidth requirements:
(1) Increasing the number of HAPs serving sensitive areaswith higher bandwidth requirements. In this case,our proposed model needs no revision.
(2) Increasing the number of FSO links between those HAPs(with high bw requirement) and satellites. In this case,we should relax our third constraint (one-to-manyrelation) and the assignment problem will get com-plicated. Multiple FSO links between a HAP and asatellite is not feasible. Multiple FSO links from aHAP to multiple satellites also necessitates signifi-cant complexity on the HAP. Assuming that thiscomplexity may be resolved, we may extend our
problem and the optimization process to encounterthis issue as follows:
We introduce an additional variable which isdefined as the number of FSO links requested byHAP j. For example, if HAP j needs to establish FSOconnections with two distinct satellites, then is setto two. Now, the extended optimization processhas multiple stages. In the first stage, we run ourmain algorithm described in Section 3.B. After theexecution of the algorithm, an assignment will bedone between HAPs and satellites. Then, for eachassignment between satellite i and HAP j, we decre-ment H imax and values by one. In the second stage, werun the same algorithm, but considering only HAPswith positive values. Then, second stage of assign-ments will be done and we decrement H imax andagain. Then we run our main algorithm in the thirdstage again considering HAPs with positive values,and so on. Algorithm stops after the stage in whichno new HAP is assigned to a satellite. Here, weshould care about not assigning a HAP to same satel-lite in any two stages. This can be ensured by updat-ing visibility matrix (and matrix of elevation anglesaccordingly) after each stage such that if HAP j isassigned to a satellite i, then we make satellite iinvisible to HAP j in next stages (V t [i][ j] is set to zeroand EAt [i][ j] is set to R). In order to avoid lengthinessof the paper, we leave details and performance eval-uation of this extended optimization algorithm asfuture work.
(3) Modifying the optimization problem so that HAPs with
high bw requirements are favored. HAP j may befavored by incrementing EAt [i][ j] value by a
Start optimization process (t = t 0 )
Check visibility conditions at time t
Calculate elevation angles.
Favor previously matched pairs.
Run the matching algorithm
Assign optical links for time t
Set t = t + ∆t
Change occur inSatellite - HAP connectivity (t = t e)
Change occur inHAP layer (t = t 0 )
t t 0 + T S ? Stop optimization process≥
YesNo
Fig. 5. State diagram of the overall optimization process.
2948 Ö. Korçak, F. Alagöz / Computer Networks 55 (2011) 2942–2953

8/12/2019 Ömer Korçak-Efficient Integration of HAPs and Mobile Satellites via Free-space Optical Links
http://slidepdf.com/reader/full/oemer-korcak-efficient-integration-of-haps-and-mobile-satellites-via-free-space 8/12
particular amount c0 (similar to that explained inSection 3.3), where satellite i is the best matchingsatellite for HAP j. However, deciding on the bestmatching satellite is not a trivial issue since bothelevation angles and link duration times should beconsidered. Moreover, deciding on the value of c 0 isalso not trivial. Therefore, this case also requires fur-ther work.
4. Numerical results
We simulate the optimal link establishment process intwo different systems. First system (System-1) consists of a MEOsatellitenetworkthat is identicalto ICOconstellation,and a hundred HAPs that serve for different sensitive areasdistributed over globe as shown in Fig. 6. In the second sys-tem (System-2), a LEO satellite network that is identical toGlobalstar constellation serves for the same HAPs as shownin Fig. 7. In both figures, dots represent static positions of HAPs and stars represent initial positions of satellites. HAPs
are assumed to operate at 20 km altitude. Characteristics of ICO and Globalstar systems are given in Table 1.
We set Dt to 1 min and simulate the system for a sys-tem period (T S ) after a 2 h of warm-up period. Theoreti-cally, since HAPs are located above the cloud layer,optical data link can be established at an elevation angleeven below the horizon (2) [13]. However, for low eleva-tion angles, some challenges must be surmounted. As theoptical beam sinks toward the horizon and below, one ex-pects longer propagation distance, stronger atmosphericattenuation, stronger wavefront distortions and scintilla-tion, larger Doppler shift, possible obstructions of the beamdue to HAP geometry, and possible interference of the Sun
on the satellite terminal [14]. Therefore, we first test theperformance of the system for emin value of 2. Then wecompare the results for a system that does not allow eleva-tion angles below 10 (emin = 10).
Fig. 8a illustrates the obtained U H values for differentH max values, for System-1. Recall that the obtained valuesare the maximum possible utilization values under the gi-ven conditions. For low H max values it is not possible toserve all of the HAPs due to satellite resource limitations.For emin = 10, degradation in utilization is more, since lessnumber of satellites are visible to HAPs. For large H max val-ues, full utilization can always be achieved. To enable fullutilization of HAPs in the scenario, H max should be at least12 and 22 for emin = 2 and emin = 10, respectively. Notethat, if supporting those values of H max is not feasible dueto the size and complexity requirements of satellites, thenchanging system parameters such as increasing number of satellites would be necessary to enable full utilization of HAPs.
Fig. 8b illustrates average of elevation angles betweensatellites and HAPs that are linked with each other. Forlow H max values, average elevation angle is lower for thesystem with emin = 2. This is due to the fact that, in thatsystem, satellite-HAP pairs with very low elevation anglesare linked in order to increase HAP utilization. As H
max ex-
ceeds a certain value, Aavg becomes independent of theminimum elevation angle, and for sufficiently large H max
values (larger than 30 in the scenario), it reaches to itsmaximum possible value (around 53 in the scenario).
Fig. 9 illustrates the simulation results for System-2.Obtained results show that performance behavior of Sys-tem-2 with respect to changing H max values is similar tothe performance behavior of System-1. Since there aremore satellites to serve same number of HAPs, smallerH max value is sufficient for full utilization of HAPs (it shouldbe at least 4 and 6 for emin = 2 and emin = 10, respec-tively). On the other hand, elevation angle values are lowerin System-2 comparing to the System-1. For example, max-imum possible value of Aavg is approximately 42.5 in Sys-tem-2, which is more than 10 lower than the maximum
Aavg value for System-1. This is related to the altitudes
Fig. 6. Locations of HAPs and initial location of satellites (System 1 – ICO).
Ö. Korçak, F. Alagöz / Computer Networks 55 (2011) 2942–2953 2949

8/12/2019 Ömer Korçak-Efficient Integration of HAPs and Mobile Satellites via Free-space Optical Links
http://slidepdf.com/reader/full/oemer-korcak-efficient-integration-of-haps-and-mobile-satellites-via-free-space 9/12
and number of satellites in the system. Satellites with highaltitudes have larger coverage areas and offer higher eleva-tion angles according to (4). As the altitudes of satellitesare decreased with a given ratio, the number of satellitesshould be sufficiently increased in order to acquire samecoverage and elevation angle values. Although System-2
has more satellites than System-1, we can say that it doesnot offer higher coverage and elevation angle values due tolow altitudes of satellites, according to the results shown inFig. 9. Note that, although smaller H max values are suffi-cient to achieve full utilization in System 2, due to its lowercoverage, total number of optical transmitters/receiversneeded in the whole system is not lower than System-1.
Next, we test the average of link duration times. As wementioned in the previous section, matching of satellites
and HAPs that maximize the Aavg value may result in fre-quent switching of the optical links. Therefore, we pro-posed to favor existing links with a particular amount cas described in Section 3.3. Fig. 10a illustrates the averageof link duration times, and Fig. 10b illustrates the Aavg val-ues with changing c value, for System-1. If c is set to zero,we never care about switching of links and get better Aavg
value, but average link duration time is quite low. Whenwe slightly increase c value, link duration times effectivelyincrease with a slight decrease in Aavg value. For example,
Fig. 7. Locations of HAPs and initial location of satellites (System 2 – Globalstar).
Table 1
Characteristics of ICO and Globalstar satellite constellations.
ICO Globalstar
Number of satellites(N P N S )
10 (2 5) 48 (6 8)
Altitude (hS ) 10,355 km 1410 kmPeriod (T sat ) 6 h 2 hInclination angle (a) 45 52
Type Inclined 2p-constellation
Inclined 2p-constellation
Phase difference (D/) 0 360/N P N S = 7.5
Fig. 8. (a) Utilization of HAPs and (b) average of elevation angles for different H max values. (System-1).
2950 Ö. Korçak, F. Alagöz / Computer Networks 55 (2011) 2942–2953

8/12/2019 Ömer Korçak-Efficient Integration of HAPs and Mobile Satellites via Free-space Optical Links
http://slidepdf.com/reader/full/oemer-korcak-efficient-integration-of-haps-and-mobile-satellites-via-free-space 10/12
for H max = 12, increasing c from zero to one yields approx-imately 18% increase in link duration times with only0.02% decrease in Aavg . Further increasing c, gap betweengain and loss gets closer. After a point, average link dura-tion time reaches to a saturation value and do not increasewith the c value. For example increasing c from 40 to 90,results in very slight increase in average link duration time,but significantly decreases Aavg value as shown in Fig. 10b.Considering these issues, an optimal value for c could bechosen depending on the system objectives and require-ments of the applications.
Let us define gain and loss functions with respect to c,G(c) and L(c), as follows:
GðcÞ ¼ LDðcÞ LDð0Þ
LDð0Þ ; ð17Þ
LðcÞ ¼ Aav g ð0Þ Aav g ðcÞ
Aav g ð0Þ ; ð18Þ
where LD(c) denotes average link duration time, and Aavg (c) denotes Aavg value with respect to c. G(c) representsratio of gain obtained in link duration time, when we favorexisting links by c, and L(c) represents ratio of loss encoun-tered in average elevation angles. Now, according to gain
and loss functions, we define net gain function (NGF ) asfollows:
NGF ðcÞ ¼ g GðcÞ ð1 gÞ LðcÞ: ð19Þ
g is a value between zero and one and should be se-lected according to the objectives of the system. If mini-mizing the switching cost is more important thanelevation angle, then g value should be closed to one,and if increasing the elevation angle is more important,then it should be closed to zero. Optimal c value is theone that maximizes NGF (c) according to the selected g va-lue. Fig. 11 illustrates the obtained NGF (c) values with re-spect to different g values, for H max = 12. MaximumNGF (c) value obtained for each g value is marked with cir-
cle. In the considered scenario (System-1, H max = 12,emin = 1), best c values for g = 0.8 and g = 0.2 are around50 and 20, respectively. In general, one should decide forthe most appropriate g value depending on the systemobjectives and requirements of the applications, and multi-ple runs of optimization process could be performed fordifferent c values in order to converge to the maximumNGF (c) value.
5. Conclusions
In this paper, we consider non-geostationary (NGEO)
mobile satellite systems integrated withHigh Altitude Plat-forms (HAPs) for world-wide high capacity and real-time
Fig. 9. (a) Utilization of HAPs and (b) average of elevation angles for different H max values. (System-2).
Fig. 10. (a) Average of link duration times and (b) elevation angles for various c and H max values (System-1, emin = 2).
Ö. Korçak, F. Alagöz / Computer Networks 55 (2011) 2942–2953 2951

8/12/2019 Ömer Korçak-Efficient Integration of HAPs and Mobile Satellites via Free-space Optical Links
http://slidepdf.com/reader/full/oemer-korcak-efficient-integration-of-haps-and-mobile-satellites-via-free-space 11/12

8/12/2019 Ömer Korçak-Efficient Integration of HAPs and Mobile Satellites via Free-space Optical Links
http://slidepdf.com/reader/full/oemer-korcak-efficient-integration-of-haps-and-mobile-satellites-via-free-space 12/12
Fatih Alagöz is an Associate Professor in theDept. of Computer Eng., Bogazici University,Turkey. From 2001 to 2003, he was with theDept. of Electrical Eng., United Arab EmiratesUniversity, AlAin, UAE. In 1993, he was aResearch Engineer in a missile manufacturingcompany, Muhimmatsan AS, Turkey. Hereceived the B.Sc. degree in electrical engi-neering from the METU, Turkey, in 1992, and
M.Sc. and D.Sc. degrees in electrical engi-neering from George Washington University,USA in 1995 and 2000, respectively. Hiscurrent research interests are in the areas of
satellite networks and wireless/mobile networks, UWB communications.He has contributed/managed to 15 research projects for various agencies/
organizations including US Army of Intelligence Center, Naval ResearchLaboratory, TUBITAK, BAP, etc. He has edited five books and publishedmore than 90 scholarly papers in selected journals and conferences. He isthe Satellite Systems Advisor to the Kandilli Earthquake ResearchInstitute, Istanbul, Turkey. He has served on several major conferencestechnical committees, and organized and chaired many technical sessionsin many international conferences. He is a member of the IEEE Satelliteand Space Communications Technical Committee. He has numerousprofessional awards.
Ö. Korçak, F. Alagöz / Computer Networks 55 (2011) 2942–2953 2953