o c t o p u s scalable routing protocol for wireless...
TRANSCRIPT
-- LLiillyy IIttkkiinn -- EEvvggeennyy GGuurreevviicchh -- IInnnnaa VVaaiissbbaanndd --
LLaabb CChhiieeff EEnnggiinneeeerr:: DDrr.. IIllaannaa DDaavviidd IInnssttrruuccttoorr:: RRooiiee MMeellaammeedd
OO CC TT OO PP UU SS SSccaallaabbllee RRoouuttiinngg PPrroottooccooll
FFoorr WWiirreelleessss AAdd HHoocc NNeettwwoorrkkss

Table of Contents 1. Introduction................................................................................................................. 4
2. Detailed Description ................................................................................................... 6
2.1. The Octopus Node .............................................................................................. 6 2.2. OctopusAgent - Structure and Main Features..................................................... 8
2.2.1. Octopus Agent Class Diagram.................................................................... 8 2.2.2. Main Type Definitions Used in OctopusAgent .......................................... 9 2.2.3. NS2 Packets .............................................................................................. 10 2.2.4. The Octopus Packet Header...................................................................... 10 2.2.5. Main Tcl Commands Binded to Octopus Agent....................................... 10 2.2.6. OctopusAgent::recv Method..................................................................... 11 2.2.7. OctopusAgent::forward_pkt Method........................................................ 11 2.2.8. OctopusAgent Modules and Components ................................................ 11
2.2.8.1. Octopus Core Module ....................................................................... 11 2.2.8.1.1. Core Neighbor Tables Management .............................................. 12 2.2.8.1.2. Core One-Hop Update ................................................................... 14 2.2.8.1.3. Core Strip Update .......................................................................... 16 2.2.8.1.4. Core End node................................................................................ 18 2.2.8.1.5. Core Bypassing (Optimization) ..................................................... 20 2.2.8.1.6. Core Queue (Optimization)............................................................ 21 2.2.8.1.7. Core Two Hop Neighbor Table (Optimization)............................. 22 2.2.8.1.8. Core Neighbor Tables Validation (Optimization) ......................... 24 2.2.8.1.9. Low Energy (unstable) Nodes (Experiment) ................................. 25
2.2.8.2. Octopus Find Location Module ........................................................ 27 2.2.8.2.1. FL Seek Target............................................................................... 29 2.2.8.2.2. FL Reply (Optimization)................................................................ 30 2.2.8.2.3. FL Cache (Optimization) ............................................................... 30 2.2.8.2.4. FL Queue (Optimization)............................................................... 31 2.2.8.2.5. FL Step Queue (Optimization)....................................................... 32 2.2.8.2.6. FL Bypass (Optimization).............................................................. 33 2.2.8.2.7. FL Estimated Location (Optimization).......................................... 34 2.2.8.2.8. FL Forward to Target (Optimization) ............................................ 34 2.2.8.2.9. Multiple Sending Directions (Optimization) ................................. 35
2.2.8.3. The OctopusDB Class....................................................................... 35 3. Octopus Agent Installation and Usage...................................................................... 36
3.3. Prerequisites...................................................................................................... 36 3.3.1. Development Platform.............................................................................. 36 3.3.2. NS2 ........................................................................................................... 36 3.3.3. Octopus Agent Integration into NS2......................................................... 37
3.3.3.1. C++ Source Code Installation........................................................... 37 3.3.3.2. OTcl Source Code Installation.......................................................... 38 3.3.3.3. Building NS2 with Octopus Agent ................................................... 38
3.4. Octopus Agent Parameters................................................................................ 38 3.4.1. Tcl Parameters .......................................................................................... 38

3.4.2. C++ Parameters......................................................................................... 41 3.5. Running Octopus Simulations .......................................................................... 42
3.5.1. Octopus Shell Scripts................................................................................ 42 3.5.2. Running a Single Octopus Simulation...................................................... 42
3.5.2.1. single_test.csh CShell Script............................................................. 42 3.5.2.2. Responsibility ................................................................................... 42 3.5.2.3. Execution .......................................................................................... 42 3.5.2.4. Input Parameters ............................................................................... 42 3.5.2.5. Output ............................................................................................... 44 3.5.2.6. file.tcl Tcl Script ............................................................................... 44
3.5.2.6.1. Responsibility ................................................................................ 44 3.5.2.6.2. Execution ....................................................................................... 44 3.5.2.6.3. Input Parameters ............................................................................ 44 3.5.2.6.4. Output ............................................................................................ 44
3.5.3. Running Multiple Octopus Simulations ................................................... 46 3.5.3.1. test_all.csh CShell Script .................................................................. 46
3.5.3.1.1. Responsibility ................................................................................ 46 3.5.3.1.2. Execution ....................................................................................... 46 3.5.3.1.3. Input Parameters ............................................................................ 46 3.5.3.1.4. Output ............................................................................................ 46
3.5.4. Editing Octopus Simulations .................................................................... 46 3.5.5. Analyzing Simulation Results................................................................... 47
4. Octopus Agent Terms ............................................................................................... 47

1. Introduction
Imagine that Octopus network is spread on the following area:
Figure 1

Octopus Routing Protocol will divide the area into horizontal and
vertical "strips" as follows:
Figure 2
The strip width is defined by the STRIPE_RESOLUTION C++ parameter
and can be easily changed (see Octopus C++ Parameters chapter for
more information regarding this parameter). Several experiments have
been performed to evaluate the optimal strip width that will provide
maximum effectiveness.
The nodes (appear as laptops on the map) are randomly spread on the
grid. The nodes located in the same vertical column are said to belong
to the same vertical strip. The nodes located in the same horizontal
row are said to belong to the same horizontal strip.

2. Detailed Description
2.1. The Octopus Node
Each wireless node in NS2 is represented by an instance of a
MobileNode object. Among others, the MobileNode object holds
information on node’s current geographic location, routing protocol
used to communicate, node’s velocity, etc. So-called routing Agents,
one Agent for each protocol, represent the routing protocols in NS2.
Each MobileNode object holds its own single instance of the routing
Agent. The routing Agent to be used in a given experiment is defined
by the input parameters of the simulation and cannot be altered during
NS2 execution. For a more detailed description of NS2 MobileNode
structure, see the NS Manual.
NS2
* DSR Agent and DSDV Agent (as well as many o
implemented in NS2
The Octopus routing Agent is represented by the
(octopus.h/cc). As stated before, each MobileNode
of OctopusAgent object, and the routing itself i
Agents of different nodes communicating one with
MobileNode
List of routing agents
Module
Octopus Agentth
O
s
th
DSDV Agent*
DSR Agent*ers) were already
ctopusAgent class
holds one instance
done by Octopus
e other.

The following information is retrieved by OctopusAgent from its parent
MobileNode in order to perform the routing:
Current geographical location (in terms of X and Y)
Speed
Energy level
Direction of movement (in terms of start and destination locations)
Implementation Aspect
Each octopus agent handles, among others, a reference to its parent
instance of MobileNode:
MobileNode *node_;
For example, to retrieve current geographical location, following
commands can be used:
int x = octAgent_->node_->X();
int y = octAgent_->node_->Y();

2.2. OctopusAgent - Structure and Main Features
2.2.1. Octopus Agent Class Diagram

2.2.2. Main Type Definitions Used in OctopusAgent
OctPktType – defines the module and component that Octopus
packet belongs to. OCT_DEFAULT_TYPE is used to identify new,
uninitialized packets. For a more detailed description of each value,
see relevant modules’ description.
enum octpkttypes {OCT_DEFAULT_TYPE = -1,
OCT_CORE_HOP_UPDATE = 0,
OCT_CORE_STRIPE_UPDATE_TO_NORTH,
OCT_CORE_STRIPE_UPDATE_TO_EAST,
OCT_CORE_STRIPE_UPDATE_TO_SOUTH,
OCT_CORE_STRIPE_UPDATE_TO_WEST,
OCT_FIND_LOCATION, OCT_GF,
OCT_END_STRIPE_UPDATE,
OCT_FIND_LOCATION_REPLY,
OCT_BYPASSED,
OCT_RETURN_BYPASSED};
typedef octpkttypes OctPktType;
OctRouteEntry – represents Octopus Route Entry, which is the unit
of data Octopus Agents use to store information on other nodes.
typedef struct oct_route_entry{
int id_; // ID of the node
double xLoc_; // Latest X location
double yLoc_; // Latest Y location
double xLocPrev_; // Previous X location
double yLocPrev_; // Previous Y location
double timetag_loc_prev_; // Timestamp of the previous location
double velocity_; // Node’s speed
double lastUpdateTime_; // The timestamp of last update of this entry
SquareDirection sqrDirection_; // The direction in which the node is located
} OctRouteEntry;

2.2.3. NS2 Packets
The communication between nodes in NS2 is performed by simulation
of sending and receiving packets of data (the packets are represented
by the Packet class). Each packet holds several headers, one header
for each communication layer. Headers are used to enable data
transfer between same communication layers of different nodes. For
further details regarding packet structure in NS2, see the NS Manual.
2.2.4. The Octopus Packet Header
The Octopus Header (struct oct_header) was added to NS2 packets in
order to enable communication between Octopus Agents of different
nodes. The following list describes Octopus Header features that are
used by all Octopus modules and components (for a detailed
description of module-specific Octopus header fields see relevant
module’s description):
double send_time; // Simulation time at current packet sending
OctPktType octType; // The module and component that the packet is
// intended to
double YoctLocation; // Current sending node’s x location
double XoctLocation; // Current sending node’s y location
int myaddr_; // Address of currently transmitting node
2.2.5. Main Tcl Commands Binded to Octopus Agent
NS2 supports controlling routing agents from Tcl input file. The
method that is responsible for receiving such commands on C++ end
is <agent-class>::command. For further details regarding handling Tcl
commands in NS2 the NS Manual.

The OctopusAgent supports the following Tcl commands:
start-octopus – starts Octopus Agent (triggers proactive data
collection).
fl_debug seek_loc <target id> - initiates Find Location query to
locate the <target id> node.
2.2.6. OctopusAgent::recv Method
Each Agent in NS2 has an <agent-name>::recv method. This method
is the entry point of all packets into the routing agent.
The OctopusAgent::recv method handles the following tasks:
Adds all valid information to the Find Location Cache (for more
information, see Find Location Module detailed description).
Checks whether the packet was intended to be received by this
node (in case not – the packet is ignored).
Checks the Octopus Type of the packet and invokes the relevant
module and component (in case of OCT_DEFAULT_PKT type, the
packet assumed to be received from the application layer of this
node, therefore the invoked module is Find Location Seek Target).
2.2.7. OctopusAgent::forward_pkt Method
The method handles sending an Octopus packet (including updating
the general fields of the Octopus header with the relevant data).
2.2.8. OctopusAgent Modules and Components
2.2.8.1. Octopus Core Module
The Octopus Core Module represents the proactive part of the
Octopus protocol.

The module is responsible for managing the neighbor tables of
Octopus Agent.
Follows is a list of terms used in the Octopus Core Module:
End Node – (used by Core Strip Update) is a node that does not
have any neighbors in one (or more) of the four geographical
directions, in current strip. End Nodes are the ones that initiate
Strip Updates.
Grid – the area covered by Octopus network and divided into
Octopus Strips.
Node’s Database – all node’s Neighbors Tables (One-Hop and
Strips).
Radio Range – currently defined to be 250m, is the range within
which wireless transmission of one node may be received by
another node.
2.2.8.1.1. Core Neighbor Tables Management
Each node manages five neighbor tables:
One-Hop Neighbors Table - consists of nodes located within the
Radio Range (see Octopus Terms chapter). For example, on Figure
2 there are three such areas:
° Node E one-hop area contains the following nodes: T and I.
° Node M’s one-hop area contains no nodes.
° Node V one-hop area contains node U.
In this case, one-hop neighbor table of node E will contain nodes T
and I, one-hop table of M will be empty and one-hop table of V will
contain node U.
West Strip Neighbors Table – consists of nodes located to the left of
current node’s vertical strip.

East Strip Neighbors Table – consists of nodes located to the right
of current node’s vertical strip.
North Strip Neighbors Table – consists of nodes located above
current node’s horizontal strip.
South Strip Neighbors Table – consists of nodes located below
current node’s horizontal strip.
For example, on Figure 2, the strip tables of node V will be as follows:
West Strip Table: C, T, I, E
East Strip Table: M
South Strip Table: R, K
North Strip Table: J
Note: The nodes located in one-hop neighbors table will not appear in
strip tables. Thus, node U is not contained in node’s V strip tables.
Implementation Aspect
The tables maintained by the Core module are instances of the
OctopusDB class (see OctopusDB Class chapter).
Each node initializes the following data structures before it becomes
active:
OctopusDB * hopTable = new OctopusDB(HOP_TABLE);
OctopusDB * northStripeTable = new OctopusDB(NORTH_STRIPE_TABLE);
OctopusDB * southStripeTable = new OctopusDB(SOUTH_STRIPE_TABLE);
OctopusDB * westStripeTable = new OctopusDB(WEST_STRIPE_TABLE);
OctopusDB * eastStripeTable = new OctopusDB(EAST_STRIPE_TABLE);

2.2.8.1.2. Core One-Hop Update
Every OCT_BROADCAST_INTERVAL (see Tcl Parameters chapter)
seconds, each node broadcasts its ID and location. Each node within
its Radio Range (see Octopus Terms chapter) receives this message
and updates its one-hop neighbors table accordingly. Experiments
have been performed in order to evaluate the optimal
OCT_BROADCAST_INTERVAL: on one hand, short timeout will create
congestion and packets will be lost; on the other hand, longer
OCT_BROADCAST_INTERVAL will decrease the data reliability in the
neighbor tables.
Implementation Aspect of the Sending Side
When created, the Octopus Core module schedules a location
broadcast event in OCT_BROADCAST_INTERVAL seconds (see NS Manual
for information regarding event scheduling in NS2). Octopus scheduled
events are handled by the OctopusHandler::handle method, which
initiates location broadcast and schedules the next broadcast event.
void OctopusPeriodicHandler::handle(Event *e)
{
octAgent_->broadcastMyLocation();
Scheduler::instance().schedule(this, e, octAgent_->
OCT_BROADCAST_INTERVAL + jitter(0.3,1));
}
Note: jitter(0.3,1) function produces a random float number, which is
added to the time of next broadcasting event. It helps avoiding
network load each OCT_BROADCAST_INTERVAL (see Tcl Parameters
chapter) interval.
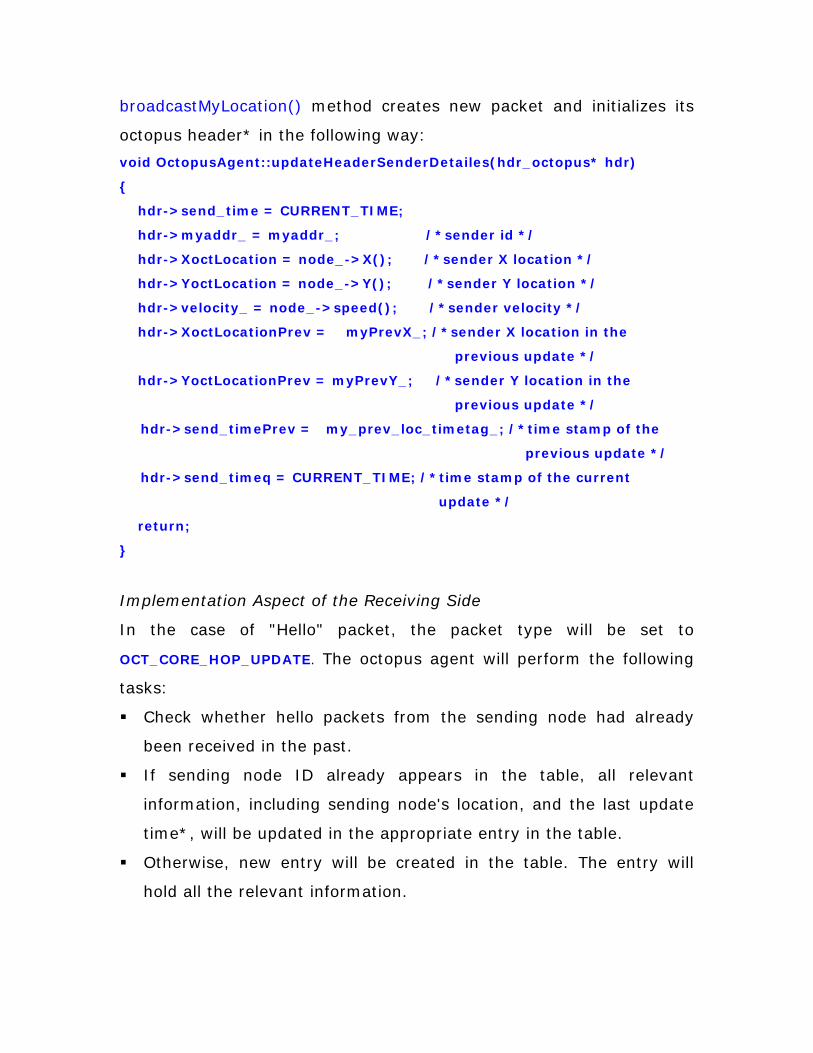
broadcastMyLocation() method creates new packet and initializes its
octopus header* in the following way:
void OctopusAgent::updateHeaderSenderDetailes(hdr_octopus* hdr)
{
hdr->send_time = CURRENT_TIME;
hdr->myaddr_ = myaddr_; /*sender id */
hdr->XoctLocation = node_->X(); /*sender X location */
hdr->YoctLocation = node_->Y(); /*sender Y location */
hdr->velocity_ = node_->speed(); /*sender velocity */
hdr->XoctLocationPrev = myPrevX_; /*sender X location in the
previous update */
hdr->YoctLocationPrev = myPrevY_; /*sender Y location in the
previous update */
hdr->send_timePrev = my_prev_loc_timetag_; /*time stamp of the
previous update */
hdr->send_timeq = CURRENT_TIME; /*time stamp of the current
update */
return;
}
Implementation Aspect of the Receiving Side
In the case of "Hello" packet, the packet type will be set to
OCT_CORE_HOP_UPDATE. The octopus agent will perform the following
tasks:
Check whether hello packets from the sending node had already
been received in the past.
If sending node ID already appears in the table, all relevant
information, including sending node's location, and the last update
time*, will be updated in the appropriate entry in the table.
Otherwise, new entry will be created in the table. The entry will
hold all the relevant information.

The appropriate case in recv(Packet* pkt) method looks as follows:
case OCT_CORE_HOP_UPDATE:
entry = hopTable->findEntry(hdr->myaddr_);
octopusCore->handleCoreHopUpdate(hdr,entry.xLoc_, entry.yLoc_,
entry.lastUpdateTime_);
// here appears additional code that handles GF/CORE/FL Queues
break;
Where hdr is a reference to the octopus header of the received packet.
In case the entry is not found in the table, the default entry is returned
by findEntry method, so handleCoreHopUpdate will add a new entry to
the table.
*Last Update Time is saved for each entry in the table in order to
support validating mechanism. It may occur, that after node B had
successfully received “Hello” message from node A, node A has moved
away from node B and the two nodes are no longer within each-others
Radio Range (see Octopus Terms chapter). In such case, B’s table
entry for A should be invalidated after a certain period of time
(otherwise B will forever "think" that A is its one hop neighbor). The
timeout for invalidating such entries in the one-hop table is defined by
HOP_NEIGHBOR_OUTDATE_INTERVAL (see Tcl Parameters chapter).
2.2.8.1.3. Core Strip Update
Every STRIPE_BROADCAST_INTERVAL (see Tcl Parameters chapter)
seconds, each node will initiate a strip update. Only End Nodes (see
Octopus Terms chapter) are able to do that. Therefore, every
STRIPE_BROADCAST_INTERVAL (see Tcl Parameters chapter), each
node checks whether it is currently an End Node in any of the four
geographical directions. If the node happens to be an End Node, it will
initiate strip update.

STRIPE_BROADCAST_INTERVAL: on one hand, short timeout will
create congestion and packets will be lost; on the other hand, longer
interval will decrease the reliability of the neighbor tables’ data.
Implementation Aspect of the Sending Side
In case the node happens to be an End Node (see Octopus Terms
chapter) it initiates a strip update. In that case, a new neighbor table
is created in the Octopus header, which will hold information on who
belong to the strip for which the update is initiated. A packet with this
header will be sent across the relevant strip, from the End Node to the
opposite end of the strip, so that all nodes in-between will receive the
list of their strip neighbors.
Let’s discuss the example of node R on Figure 2. R node appears to be
an End Node of the vertical strip from South and initiates an update in
North direction. R updates the Octopus header neighbor table with all
its one-hop neighbors that belong to its vertical strip.
As opposed to the “Hello” messages, that are broadcasted across the
Grid (see Octopus Terms chapter), strip update packets are unicast,
i.e. have a specific destination.
The destination for strip update packet is always the furthest node that
can be reached by current transmitter located in the relevant strip. If
such node is not found, bypassing mechanism is invoked. The
destination can be found by findNextDest method.
When the first parameter is a direction of the strip update, second and
third parameters are sending node coordinates and the last parameter
will be set to true if bypassing mechanism should be used or to false
otherwise.

Implementation Aspect of the Receiving Side
Each node receiving a packet of type STRIP_UPDATE (see Main
Octopus Agent Type Definitions chapter) will check whether he is in
the relevant strip. In case the strip update is relevant for current node,
it will update its strip tables according to the data in the Octopus
header.
If the receiving node is also the destination of the packet, it will
perform all the functionality of the sending side (described earlier) and
continue the strip update further in same direction.
2.2.8.1.4. Core End node
Each node that does not have one-hop neighbors in a specific
geographic direction is defined as an End Node in that direction.
Implementation Aspect of the Receiving Side
Note: This is relevant only when the Core Queue is ON.
When a node gets a strip update and reveals that
It is a destination of the current packet
There is no destination that it can transmit updated packet to
It will create a new packet with the type OCT_END_STRIPE_UPDATE
(see Main Octopus Agent Type Definitions chapter) and transmit it to
the sender of the received packet. The purpose of this packet is to
prove to the sending node that the packet was not lost, but received
by the destination and the current update is finished.
The following question can be asked: why such packets are not needed
for other nodes that are not located in the end of the strip?
The answer is simple. The proof for other nodes is the fact that they
can hear whether their strip update was continued, because the
destination that they chose is within their Radio Range (see Octopus

Terms chapter) (so each packet the destination transmits can be heard
by the sender).
Implementation Aspect of the Sending Side
In order to be able to initialize a strip update, each node assures it is
an End Node (see Octopus Terms chapter) in at least one of the four
geographic directions. The OctopusAgent::amIEndNode performs such
a check.
Let's discuss the example of Figure 2. When the strip update timer of J
is over, J will check whether it is the End Node for each one of the
geographic directions.
When the check for NORTH direction will be performed, one-hop table
of J will be examined. If there are any node whose Y coordinate is
greater than that of J, J will not be the End Node of the NORTH
direction. However, in the described example, J will not find any node
to North of itself, therefore J is the End Node in this case and will
initiate a Strip Update to South. J will create a new packet of type
OCT_CORE_STRIPE_UPDATE_TO_SOUTH (see Tcl Parameters
chapter). All nodes in J’s one-hop list that also belong to J’s vertical
strip will be added to the Octopus header of the new packet. Before
sending the packet, J will examine its one hop table again in order to
find the best destination for this packet. Assuming V is within J’s Radio
Range (see Octopus Terms chapter) and U - is not, V will be chosen as
the destination and will be the next node in handling the update.

2.2.8.1.5. Core Bypassing (Optimization)
When projecting the protocol on real geographic conditions, there are
"hurdles" that can be left behind by adding the functionality called
"bypassing". The obstacles are the “holes” in topology – parts of the
Grid (see Octopus Terms chapter) where no nodes are located. Such
holes make the strip that the hole located in non-continuous and
create situation where nodes in the same strip do not “know” each
other, though belong to the same strip and have a continuous route
between them (based on nodes that are not necessarily located in the
same strip).
For example, such a situation, based on Figure 2, happens for nodes N
and O in the upper horizontal strip. Bypassing algorithm offers to
"bypass" strip update via the node J. If J is reachable from N and N
can reach O, the upper horizontal strip will be continuous and will
contain A, O, N and Q nodes.
Note: bypassing node (J in our case) is not a part of the strip, though
actually takes part in creating/updating it.
Implementation Aspect
When findNextDest fails to find the destination for the strip update (by
the regular way) and Core Bypass is enabled, it will search for a
bypassing node.
The search will be performed in one-hop table of the sending node.
The goal is to find the furthest node in strip update direction, which
does not belong to the same strip as sending node (otherwise, the
next destination would be found by regular way).
The method implementing the looking for bypass node is
OctopusCore::findBypassNode.

As the input parameters, it receives the direction of the location and
sending node location. It will return the receiving node location
(parameters transferred by reference) and the bypassing node ID. If
there is no such node, invalid values will be returned for location and
ID. The search for the bypassing node is based on a "grading" system.
For each node in one-hop neighbors table, a grade is calculated. The
node with the maximal grade will be the bypassing node. When a node
gets a strip update, it will check whether this is a strip update of
node's strip or it was chosen by representative of the neighbor strip to
be the bypassing node for it. The node can check it by reading the
packet type in the header of the packet it received.
For bypassed update, the type will be OCT_BYPASSED (see Main
Octopus Agent Type Definitions chapter). The node will update neither
its own tables nor the header table with any new information.
The packet type will be changed to OCT_RETURN_BYPASSED (see Main
Octopus Agent Type Definitions chapter) as soon as bypassing node
will find the next destination for the strip update in the original strip. It
will acquire the information about the specific strip from the location of
the sending node (the one that initiated bypassing) and will calculate
the strip update direction by relative location between the sending
node and its own location.
Whenever a node receives a packet of type OCT_RETURN_BYPASSED
it will continue the strip update, as it was a regular strip update.
2.2.8.1.6. Core Queue (Optimization)
The purpose of this optimization is to avoid loss of strip updates. Each
node that takes active part in the update (initiates or occurs to be a
destination) handles a queue, where it inserts the strip update packets
it has scheduled. In case the node does not "hear" that the destination

it chose continues the update during CR_Q_TIMEOUT (see Tcl
Parameters chapter) time, it looks for another destination and
reschedules the packet. The queue is implemented in the module
octopus_core_queue.cc.
Note: OCT_END_STRIPE_UPDATE (see Main Octopus Agent Type
Definitions chapter) packet will help to avoid endless rescheduling for
the receiving End Nodes (see Octopus Terms chapter).
Implementation Aspect
The core queue is different from queues used in the other two
modules. Its maximal length is four packets (as the number of
geographic directions). For each direction, only the last scheduled
packet (in the relevant direction) is stored. Each CR_Q_TIMEOUT
period, the agent reschedules all valid packets that appear to be
stored in the queue. This is performed by the purgeCoreQueue()
method.
Each time a node hears an update transmitted by some other node
and the locations of the sender and receiver match the direction of
strip update (calculated according to the packet type), the node will
dequeue the packet:
case OCT_CORE_STRIPE_UPDATE_TO_NORTH:
if ((CRQ)&&(CR_QUEUE->foundInCoreQueue(NORTH, hdr->myaddr_)))
{
CR_QUEUE->dequeCoreQueue(NORTH);
}
2.2.8.1.7. Core Two Hop Neighbor Table (Optimization)
The idea of this optimization came from the existing network
protocols: the nodes will share their one-hop tables with their one-hop
neighbors. Each time a "hello" messages broadcasted, the

broadcasting node will attach its one-hop neighbor table to the header.
Each time a "hello" message received by the node, it copies all the
attached entries that do not already appear in its one-hop table, into
its two-hop neighbor table.
Implementation Aspect
Each time 'hello' message received, the following code is invoked (the
relevant line is underlined. The case is the part of the octopus agent
'recv' function):
case OCT_CORE_HOP_UPDATE:
entry = hopTable->findEntry(hdr->myaddr_);
octopusCore->handleCoreHopUpdate(hdr,entry.xLoc_, entry.yLoc_,
entry.lastUpdateTime_); //previous location
if (GFQ) GF_QUEUE->purge();
if (FL_STEP_Q) FL_STEP_QUEUE -> purge();
if (FLQ) FL_QUEUE->purge();
if (CRQ) purgeCoreQueue(); //Lily 12/03
twohopTable->editDB(hdr->neiTable);
break;
The editDB method: synchronizes between own and parameter tables,
the data in the parameter table is considered to be of higher priority.
The positive influence of the optimization is the fact that each node
"knows" more nodes in the Grid (see Octopus Terms chapter). This is
can shorten the time needed for finding other nodes and as a result
improve the algorithm performance.
The negative influence of the optimization is a significantly higher load
on the network, since "hello" messages are frequently sent. Increasing
the size of the "hello" messages leads to longer transmission time,

bigger packet size and as a result to greater packet loss rate in the
network.
2.2.8.1.8. Core Neighbor Tables Validation (Optimization)
In order to avoid situations where a node broadcasts the "hello"
message, its one hop neighbors update their one hop tables and then
the node 'disappears' (moves away or turns off), but the information it
sent is still stored in the tables of its neighbors, validation mechanisms
can be used.
Implementation Aspect of validation based on time
Each time the node sends a 'hello' packet, its tables can be validated
by time. For each entry, the timestamp of its last update is stored. The
information considered valid for a period of
HOP_NEIGHBOR_OUTDATE_INTERVAL seconds (see Tcl Parameters
chapter). The method responsible for validating the table by time is
found in octopusDB module: OctopusDB::validateTableByTime.
In other words, all table entries that are older than the defined interval
are invalidated.
Implementation Aspect of validation based on location
Each time the node sends a 'hello' packet, its tables can be validated
by location. Each entry contains two locations: the one received from
the latest update and the one - from the update before the latest.
Basing on these locations, the direction of node's movement can be
evaluated. The table entries are invalidated if calculated approximate
location (X+dX, Y+dY) of the entry is out of one hop range of the
validating node.

The method responsible for validating the table by time is found in
octopusDB module: OctopusDB::validateTableByLocation.
2.2.8.1.9. Low Energy (unstable) Nodes (Experiment)
Introduction
The experiment is based on Energy Model implemented in NS2 (see
Octopus Terms chapter), which is an attribute of NS2 node. Energy
Model represents the level of energy in a mobile host.
Each Mobile Node is assigned with an initial amount of energy at
the beginning of simulation by setting the initialEnergy_ Tcl
parameter (see NS Manual for further information regarding Energy
Model).
Each node also receives txPower_ and rxPower_ Tcl parameters
that represent the amount of energy spent on transmitting and
receiving packets respectively. Further details regarding Energy
Model in NS2 can be found in the NS Manual.
When the energy level of the node goes down to zero, no more
packets can be received or transmitted by the node.
Motivation
The experiment idea is taken from real life conditions, where each
mobile host has a battery, whose charge can run out and the
mobile node will not be able to receive or transmit packets for a
certain period of time. As soon as the mobile node charges the
battery again, it returns to its usual activity.
Experiment-related terms

"Sleep Mode" – when node’s battery is on zero level (no packets
can be received nor transmitted).
"Awake Mode" – when node’s battery is not on zero level (regular
network activity).
"Stable Node" – is a mobile node that never enters into a "Sleep
Mode".
"Unstable node" – is a mobile node that enters into "Sleep Mode" in
random periods of time.
Simulation Input
The total number of nodes that take part in the simulation (both
stable and unstable).
The percent of unstable nodes.
For each unstable node periods of time when it will be in a "Sleep
Mode" (defined in a random manner).
For each node: list of simulation times when the node will initiate
packet transmission.
For each node and each simulation time: a randomly chosen
destination (can be either stable or unstable).

Simulation Output
S U C C E S S R A T E S V S N O D E S ' S T A B I L I T Y
0.96
0.97
0.98
0.99
200 225 250 275 300
strip resuolution
succ
ess
rate
[%]
s tatic
mobile
2.2.8.2. Octopus Find Location Module
The Find Location module is responsible for supplying the source
node information regarding target node’s geographic location.
The Find Location module is represented by the
OctopusFindLocation and Octopus_FLStepQueue classes and is
implemented in octopus_find_location.h/cc files.
Follows is a list of terms used in Find Location Module:
Access Node – (used by Find Location Seek Target) is a node whose
Database contains data on both the Source and the Target nodes.
In other words, any node that is located in a cell that is the crossing
of Source’s strip and Target’s strip may be an Access Node. In most
cases, the Access Node is the node that has first found the Target.
Best Bypass Destination – (used by FL Seek Target and FL Reply),
in case FL Seek Target or FL Reply components are unable to find
Best Next Destination and the FL Bypass feature is ON, the Query is
forwarded to the Best Bypass Destination which is node that is

chosen in the same way as Best Next Destination, but without the
restriction of being in the same strip as the current node. In case
more than one suitable node found, the Best Bypass Destination will
be the one closest to the original strip.
Best Next Destination – (used by FL Seek Target and FL Reply) is
the node to whom FL Query will be forwarded by current node. It
may only be a node in current node’s One-Hop Table, and is always
a node located in current node’s strip. The priority of choosing Best
Next Destination is as follows:
° The furthest node in the next to current cell in Sending Direction.
° The furthest node in the one after the next to current cell in
Sending Direction.
° The furthest reachable node in Sending Direction.
° The furthest node in current cell.
Bypass Offsets – (used by FL Seek Target and FL Reply), are the
horizontal and vertical offsets of current FL Seek Target or FL Reply
Query from its original strip.
Grid – the area covered by Octopus network and divided into
Octopus Strips.
Node’s Database – all node’s Neighbors Tables (One-Hop and
Strips).
Radio Range – currently defined to be 250m, is the range within
which wireless transmission of one node may be received by
another node.
Sending Direction – (used by FL Seek Target and FL Reply) is the
direction in which FL Query should be forwarded across the Grid.
The Sending Direction of each query is defined by Source and
cannot be altered by other nodes.

Source (node) – (used by Find Location Module), is the node that
has initiated the search for the Target, and is the node to receive
the result of FL Query.
Target (node) – (used by Find Location Module), is the node whose
location being searched by the Source.
2.2.8.2.1. FL Seek Target
Responsible for the actual seeking of target node’s location.
Represented by the OctopusFindLocation::Oct_FL_SeekTarget
method.
Invoked whenever a packet of type OCT_FIND_LOCATION (see
Main Octopus Agent Type Definitions chapter) is received or need to
be sent.
In case of initiating node: builds the FL part of Octopus packet
header and redirects the packet to the Best Next Destination or
nodes (defined by simulation state, initial settings, the chosen FL
algorithm and other input parameters).
In case of forwarding node:
° Makes local snapshots of all node’s neighbors tables (in order to
retain DB integrity while the function is running).
° Searches the target node in local snapshots. If found – searches
for Access Node, updates relevant data in FL part of the Octopus
packet header and invokes the chosen reply algorithm according
to Route_Reply_Algorithm (see Tcl Parameters chapter).
° If not found – defines the appropriate Sending Direction, updates
relevant data in the FL part of Octopus packet header and
redirects the packet to the Best Next Destination.

2.2.8.2.2. FL Reply (Optimization)
Responsible for transferring target location data from the Access
Node back to the source (invoked as soon as target location is
determined)
Represented by the OctopusFindLocation::FL_REPLY_GetNextDest
method.
Invoked whenever a packet of type OCT_FIND_LOCATION_REPLY is
received.
Makes local snapshots of one-hop neighbors table (in order to retain
DB integrity while the function is running).
Searches the source node in the local snapshot. If found – sends
the data directly to the source node.
If not found – updates relevant data in the FL Reply part of Octopus
packet header and redirects the packet to the Best Next
Destination.
2.2.8.2.3. FL Cache (Optimization)
Responsible for maintaining cached location data, its retrieval and
validation.
Represented by the OctopusFindLocation::Oct_FL_UpdateCache and
OctopusFindLocation::Oct_FL_GetCachedTarget methods.
No Octopus Packet Type (see Main Octopus Agent Type Definitions
chapter) is associated with the component since it does not require
any packets to be sent or received (passive “listener”).
On every execution of the Octopus::recv method (every time a
packet is received), the cache table is updated with valid location
data from its Octopus header and its timestamp.
On every execution of the Find Location Seek Target component,
the cache table is being checked for a valid target location data.

Cached target location data is defined valid in case its timestamp is
not older than the cache_validity_period_ (see Tcl Parameters
chapter) parameter.
In case target location data is valid, it is used and Find Location
Seek Target component terminates.
In case the data is invalid, it is removed from the cache table and
Find Location Seek Target proceeds as usual.
2.2.8.2.4. FL Queue (Optimization)
Responsible for reinitiating failed target location queries in different
Sending Directions in order to increase FL Seek Target component
reliability and success rate.
Represented by the OctopusQUEUE class (octopus_queue.h/c).
Relevant only for nodes that are the first to initiate the FL Seek
Target query.
No Octopus Packet Type (see Main Octopus Agent Type Definitions
chapter) is associated with the component since it does not require
any packets of special structure to be sent or received.
The FL Queue can be turned ON and OFF by setting the FLQ_Switch
Tcl parameter to 1 or 0 respectively (see Tcl Parameters chapter).
When target search query is originated, once the FL Seek Target
component has built an appropriate search packet and is ready to
send it, a copy of the packet to be sent is added to the FL Queue.
In case no result for the query is received during the
FL_Q_TIMEOUT (see C++ Parameters chapter) period, the FL
Queue invokes the FL Seek Target component to initiate the same
query in a different Search Direction.
The number of times the query will be reinitiated is defined by the
FLQ_MAX_RETRIES (see C++ Parameters chapter) parameter.

As soon as the result of the query is received, the packet is
removed from the FL Queue.
2.2.8.2.5. FL Step Queue (Optimization)
Responsible for retransmitting packets that were not successfully
received by the Next Best Destination.
Represented by the Octopus_FLStepQueue class (located in
octopus_find_location.h/c).
No Octopus Packet Type (see Main Octopus Agent Type Definitions
chapter) is associated with the component since it does not require
any packets to be sent or received (passive “listener”).
The FL Step Queue may be turned ON and OFF by setting the
FL_Step_Q_Switch Tcl parameter to 1 and 0 respectively (see Tcl
Parameters chapter).
Just before FL Seek Target and FL Reply component send a packet,
a copy of the packet is added to the FL Step Queue.
In case the FL Step Queue does not “hear” the destination forward
the packet further within time period defined by the
FL_STEP_Q_TimeOut Tcl parameter, the packet is rescheduled.
The number of times the same packet will be rescheduled is defined
by the FL_STEP_Q_MaxRetries Tcl parameter.
In case FL Step Queue “hears” that the destination has forwarded
the packet to the next destination (or has found the target of the
packet), the packet is removed from the queue.

2.2.8.2.6. FL Bypass (Optimization)
Responsible for overcoming obstacles and “holes” in the Octopus
strips that appear on the way of FL queries.
The FL Bypass feature is integrated directly into the FL Seek Target
and FL Reply components (octopus_find_location.h/cc).
The FL Bypass feature may be turned ON and OFF by setting the
FL_Bypass_Enabled Tcl parameter to 1 and 0 respectively.
No Octopus Packet Type (see Main Octopus Agent Type Definitions
chapter) is associated with the component since it does not require
packets of special format to be sent or received.
Sending side: when the FL Seek Target or FL Reply components are
unable to find Best Next Destination for a query, the query is
forwarded to the Best Bypass Destination.
Receiving side: when the Bypass Offsets in the Octopus header of
the received packet are not 0, the FL components calculate the
original strip of the query and the search for Best Next Destination
is done assuming as if current node was located inside the original
strip.
Receiving side: when the Bypass Offsets in the Octopus header of
the received packet are not 0, the FL components calculate the
original strip of the query and the search for Best Next Destination
is done as if current node was located inside the original strip.
There is no limitation regarding the distance a query may “travel”
outside its original strip, nor the maximal offset off the strip it can
reach. However, the query will always “yearn” to return to its
original strip (by minimizing the Bypass Offsets as much as
possible).

2.2.8.2.7. FL Estimated Location (Optimization)
Responsible for calculating estimated source/target location for FL
queries.
Integrated directly into the FL Reply component (located in
octopus_find_location.h/cc).
No Octopus Packet Type (see Main Octopus Agent Type Definitions
chapter) is associated with the component since it does not require
any packets of special structure to be sent or received.
FL Reply component is responsible for transferring the query back
to the source node or directly to the target node (according to the
Reply_To_Source Tcl parameter (see Tcl Parameters chapter)).
Once invoked, the FL Reply component checks the status of the
relevant use-estimated-location flag (Source_Loc_Type Tcl
parameter (see Tcl Parameters chapter) when returning to source
node, Target_Loc_Type Tcl parameter when forwarding to target).
In case estimated location should be used, it is calculated
considering node’s previous location, speed and most current
location.
2.2.8.2.8. FL Forward to Target (Optimization)
Responsible for forwarding the packet directly to the target, as soon
as target location is determined.
Integrated directly into the FL Reply component (located in
octopus_find_location.h/cc).
No Octopus Packet Type (see Main Octopus Agent Type Definitions
chapter) is associated with the component since it does not require
any packets of special structure to be sent or received.

Forwarding to target may be turned ON and OFF by setting the
Reply_To_Source Tcl parameter (see Tcl Parameters chapter) to 0
and 1 respectively.
When invoked, the FL Reply algorithm determines the Sending
Direction and therefore the Next Best Destination upon the above
settings.
2.2.8.2.9. Multiple Sending Directions (Optimization)
Responsible for initializing multiple instances of the same FL Seek
Target query in different Search Directions.
Integrated directly into the FL Seek Target component (located in
octopus_find_location.h/cc).
The number of Sending Directions the query will be initiated in is
defined by the FindLoc_Mode Tcl parameter (valid values are 1, 2
and 4).
Note: Since all nodes within the Radio Range will receive the
transmitted packet, there is no need to send multiple packets (one
packet for each Best Next Destination), but define multiple Best
Next Destinations for one packet (for more information regarding
sending packets to multiple destinations see detailed description of
the Octopus Packet Header (see Main Octopus Agent Type
Definitions chapter)).
2.2.8.3. The OctopusDB Class
OctopusDB class represents a single neighbors table.
OctopusDB class holds an array of OCT_MAX_TABLE_SIZE (see
C++ Parameters chapter) entries of OctRouteEntry (see Main
Octopus Agent Type Definitions chapter) type

In addition to basic methods of such storage object (add entry,
delete entry, update entry) other methods have been implemented
in order to make the work with the tables easier and quicker:
addToDb - Adds the whole table transferred as a parameter to
itself.
editDB - Updates the local table with transferred entries. Helpful
during updating neighbors tables from the received tables.
3. Octopus Agent Installation and Usage
3.3. Prerequisites
3.3.1. Development Platform
The latest version of our code has been checked and found fully
functional in Linux environment. Portions of the project were
developed on Cygwin under Windows XP, but large simulations in this
environment were very time consuming, that is why the project was
ported to Linux.
3.3.2. NS2
NS2.26 – Network Simulator (version 2.26) is a platform for simulating
large-scale networks (static and dynamic). In our project, we used
package called NS-allinone-2.26. The NS2 simulator and all relevant
information regarding installation and usage is available at
http://www.isi.edu/nsnam/ns/index.html. A complete manual to NS2
can be found at http://www.isi.edu/nsnam/ns/ns-documentation.html.

3.3.3. Octopus Agent Integration into NS2
3.3.3.1. C++ Source Code Installation
The Octopus Agent requires the following C++ source code files to be
placed in ns-2.26/octopus directory:
octopus.h/cc – contain implementation of the OctopusAgent class
octopus_core.h/cc – contain implementation of the Octopus Core
Module
octopus_core_queue.h/cc – contain implementation of the Octopus
Core Queue component
octopus_find_location.h/cc – contain implementation of the Octopus
Find Location module
octopus_gf.h/cc – contain the implementation of the Octopus GF
module (not covered by this report)
octopus_definitions.h – contains general Octopus Agent definitions
used by all modules
octopus_db.h/cc – contain implementation of the OctopusDB class
octopus_queue.h/cc – contain implementation of the OctopusQueue
class
The following C++ source code files should be placed in ns-
2.26/common directory:
mobilenode.h – header file of the MobileNode class
packet.h – header file of the Packet class
For a more detailed description of each module, see the Octopus
Modules chapter.

3.3.3.2. OTcl Source Code Installation
The Octopus Agent requires the following OTcl source code files in
NS2.26/tcl/mobility directory:
octopus.tcl – contains implementation of the OctopusAgent OTcl
class
The following OTcl source code files should be placed in NS2.26/tcl/lib
directory:
ns-lib.tcl – general purpose OTcl module
ns-packet.tcl – contains implementation of the Packet OTcl class
For a more detailed description of each module, see Tcl Parameters
chapter.
3.3.3.3. Building NS2 with Octopus Agent
In order to build NS2 after integrating Octopus Agent, the Makefile file
should be placed in the ns-2.26 directory. After that, typing “make”
while in ns-2.26 will build NS2. To execute NS2, simply type “ns
<input-file.tcl>”.
3.4. Octopus Agent Parameters
3.4.1. Tcl Parameters
NS2 supports setting simulation configuration by passing Tcl
parameters to it. Each Tcl parameter has a corresponding C++
parameter that will be updated with the value of Tcl parameter as soon
as the simulation starts. Further information regarding passing Tcl
parameters to NS2 can be found in NS Manual.

Follows is a list of Octopus Agent specific Tcl parameters that were
defined during project development (the parameters are first defined
and assigned a default value in the octopus.tcl source file):
OCT_BROADCAST_INTERVAL – The interval, in seconds, at which
“Hello” (one-hop update) messages are being broadcasted (see
Core Module description for further information).
STRIPE_BROADCAST_INTERVAL – The interval, in seconds, at
which strip update messages are being broadcasted (see Core
Module description for further information).
HOP_NEIGHBOR_OUTDATE_INTERVAL – The interval, in seconds,
after which an entry in one-hop neighbors table becomes outdated
(see Core Module description for further information).
STRIPE_NEIGHBOR_OUTDATE_INTERVAL – The interval, in
seconds, after which an entry in strip neighbors table becomes
outdated (see Core Module description for further information).
VALIDATE_BY_LOCATION – Enable (1) / Disable (0) neighbors
tables validation by location (see Core Module description for
further information).
FindLoc_Mode – Defines the number of Sending Directions a FL
Seek Target query will be initialized in (valid values are 1, 2 and 4,
see Find Location Module description for further information).
FindLoc_Init_Dir – Defines the Sending Direction that will be used
first to initialize FL Seek Target query (valid values are 1 for North,
and 9 for North East, see Find Location Module description for
further information).
Source_Loc_Type – Defines whether the real (0) or estimated (1)
source location will be used for initiating Route Reply (see Find
Location Module description for further information).

Reply_To_Source – Defines whether the Access Node will send the
packet back to Source (1) or forward the packet directly to the
Target (0) (see Find Location Module description for further
information).
Target_Loc_Type – Defines whether the real (0) or estimated (1)
target location will be used for to transfer the packet from Access
Node to the Target (see Find Location Module description for further
information).
Route_Reply_Algorithm – Defines the algorithm to be used when
transferring packets further from Access Node (to the Source or the
Target). 0 to use GF (not covered in current project); 1 to use FL
Reply (see Find Location Module description for further
information).
FL_STEP_Q_Switch – Enables (1) / Disables (0) the FL Step Queue
(see Find Location Module description for further information).
FL_STEP_Q_TimeOut – Timeout, in seconds, before FL Step Queue
reschedules a packet (see Find Location Module description for
further information).
FL_STEP_Q_MaxRetries – Number of times a packet in FL Step
Queue will be rescheduled (see Find Location Module description for
further information).
Second_Chance – Input parameter used by the GF Module (not
covered in current project).
Correct_Location – Input parameter used by the GF Module (not
covered in current project).
Cache_Valid_Period – The time, in seconds, before an entry in FL
Cache table becomes outdated (see Find Location Module
description for further information).

Routing_Mode - Input parameter used by the GF Module (not
covered in current project).
FLQ_Switch – Enables (1) / Disables (0) the FL Queue (see Find
Location Module description for further information).
GFQ_Switch - Input parameter used by the GF Module (not covered
in current project).
CRQ_Switch – Enables (1) / Disables (0) the Core Queue (see Core
Module description for further information).
Node_Has_GPS – Parameter used by module not covered in current
project.
FL_Bypass_Enabled – Enables (1) / Disables (0) the FL Bypass
feature (see Find Location Module description for further
information).
CR_Bypass_Enabled – Enables (1) / Disables (0) the Core Bypass
feature (see Core Module description for further information).
Asleep_Awake_Sim_Type – Indicates whether current simulation is
Low Energy Simulation (1) or not (0) (see Core Module description
for further information).
3.4.2. C++ Parameters
Follows is a list of Octopus Agent specific C++ parameters (defined in
octopus_definitions.h C++ header file):
FL_Q_TIMEOUT – Timeout, in seconds, before FL Queue
reschedules a packet (see Find Location Module description for
further information).
CR_Q_TIMEOUT – Timeout, in seconds, before Core Queue
reschedules a packet (see Core Module description for further
information).

FLQ_MAX_RETRIES – Number of times a packet in FL Queue is
rescheduled (see Find Location Module description for further
information).
STRIPE_RESOLUTION – The width of Octopus strips.
OCT_MAX_TABLE_SIZE – The maximal number of nodes in
simulation (does not have to be exactly the number of nodes, but
cannot be lower than the actual number).
3.5. Running Octopus Simulations
3.5.1. Octopus Shell Scripts
In order to automate the process of running experiments the following
scripts were written (should be placed in ns-2.26/sim directory):
single_test.csh <parameter list>
file.tcl
test_all.csh <output file>
found_but_not_replied.pl
3.5.2. Running a Single Octopus Simulation
3.5.2.1. single_test.csh CShell Script
3.5.2.2. Responsibility
Setting the desired configuration
Running the experiment several times (for better accuracy)
Collecting and processing the relevant statistical data
3.5.2.3. Execution
While in ns-2.26, type ./sim/single_test.csh <list of parameters>
3.5.2.4. Input Parameters
1. results file

2. log file
3. horizontal side of Grid - [m] (see Octopus Terms chapter)
4. vertical side of Grid - [m] (see Octopus Terms chapter)
5. number of nodes - integer
6. Static/Mobile mode - ON/OFF
7. ROUTING_MODE - ON/OFF (see Tcl Parameters chapter)
8. FLQ_SWITCH - ON/OFF (see Tcl Parameters chapter)
9. GFQ_SWITCH - ON/OFF (see Tcl Parameters chapter)
10. CRQ_Switch - ON/OFF (see Tcl Parameters chapter)
11. STRIPE_RESOLUTION - [m] (see C++ Parameters chapter)
12. OCT_BROADCAST_INTERVAL - [sec] (see Tcl Parameters chapter)
13. STRIPE_BROADCAST_INTERVAL - [sec] (see Tcl Parameters
chapter)
14. CORRECT_LOCATION - ON/OFF (see Tcl Parameters chapter)
15. VALIDATE_BY_LOCATION - ON/OFF (see Tcl Parameters chapter)
16. SECOND_CHANCE - ON/OFF (see Tcl Parameters chapter)
17. FL_BYPASS - ON/OFF (see Tcl Parameters chapter)
18. CR_BYPASS - ON/OFF (see Tcl Parameters chapter)
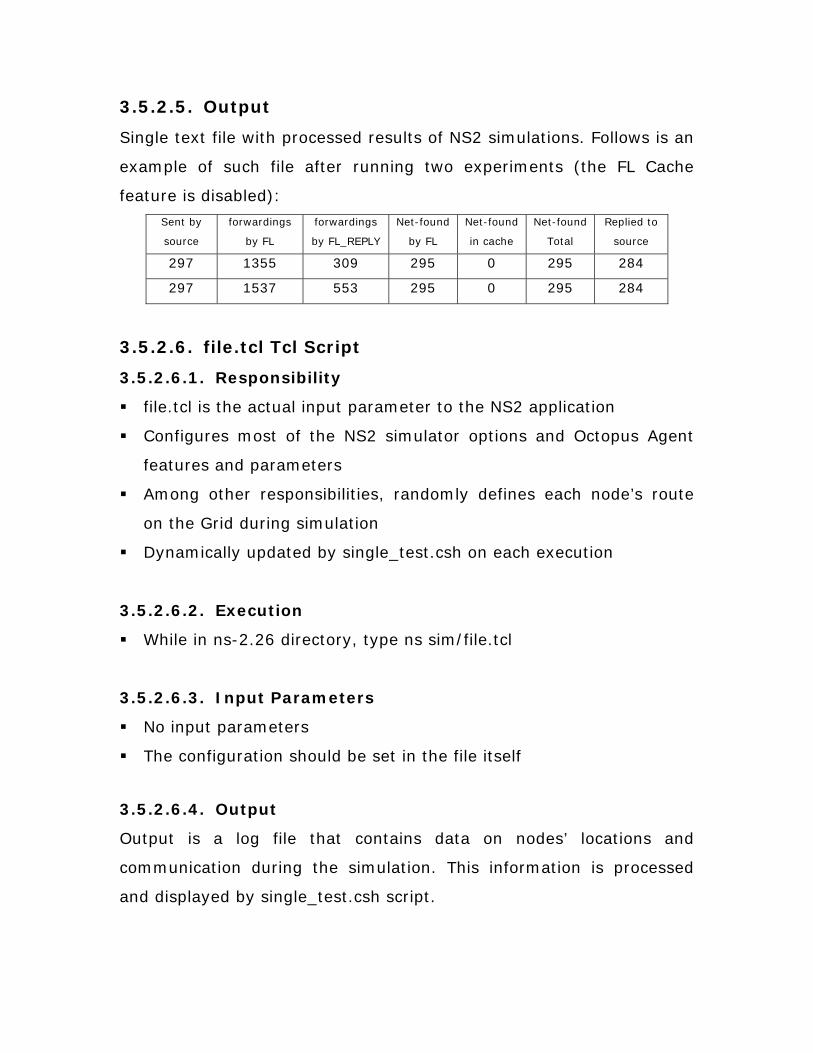
3.5.2.5. Output
Single text file with processed results of NS2 simulations. Follows is an
example of such file after running two experiments (the FL Cache
feature is disabled):
Sent by
source
forwardings
by FL
forwardings
by FL_REPLY
Net-found
by FL
Net-found
in cache
Net-found
Total
Replied to
source
297 1355 309 295 0 295 284
297 1537 553 295 0 295 284
3.5.2.6. file.tcl Tcl Script
3.5.2.6.1. Responsibility
file.tcl is the actual input parameter to the NS2 application
Configures most of the NS2 simulator options and Octopus Agent
features and parameters
Among other responsibilities, randomly defines each node’s route
on the Grid during simulation
Dynamically updated by single_test.csh on each execution
3.5.2.6.2. Execution
While in ns-2.26 directory, type ns sim/file.tcl
3.5.2.6.3. Input Parameters
No input parameters
The configuration should be set in the file itself
3.5.2.6.4. Output
Output is a log file that contains data on nodes’ locations and
communication during the simulation. This information is processed
and displayed by single_test.csh script.

Examples from output of NS execution with file.tcl containing mobile
configuration:
node 68: 582.02331961591221 937.00960219478725
setdest: node 68 will move at 0 from (582 937) to (544 853) with velocity
1.6526491769547325
setdest: node 68 will move at 55 from (544 853) to (920 947) with velocity
1.6526491769547325
…
node 138: 521.94101508916322 511.49519890260632
setdest: node 138 will move at 0 from (521 511) to (810 1465) with velocity
5.9684927983539096
…
rand_source = 68
rand_target 138, start_time 30.116126543209877
rand_target 92, start_time 49.111882716049379
rand_target 193, start_time 58.640046296296298
…
Starting Simulation...
num_nodes is set 200
Node 68 (561.57, 891.64) thinks he is originating this packet (ip_dst = 138, dst =
0).
Cache: Node 68 found target 138 (573.95, 683.49). The search was originated by 68
(561.57, 891.64).
…
FL_REPLY: Node 68 got route_reply for target 138 (573.946460, 683.487522).
…
3.5.3. Running Multiple Octopus Simulations
3.5.3.1. test_all.csh CShell Script
3.5.3.1.1. Responsibility
A list of single_test.csh executions with different parameters
3.5.3.1.2. Execution
While in ns-2.26 directory, type ./sim/test_all.csh <results file>
3.5.3.1.3. Input Parameters
The only input parameter is the file that will eventually contain all the
processed results.
3.5.3.1.4. Output
Output - a single text file with processed results of all NS2 simulations
that were defined in test_all.csh.
3.5.4. Editing Octopus Simulations
To add a new test parameter (PARAM), follow the next steps:
Add the desired definition with a unique comment in the end to the
appropriate file (sim/file.tcl or octopus/octopus_definitions.h). For
example, adding a new parameter (PARAM) to file.tcl file:
PARAM <default value> ;# set_PARAM
Add to single_test.csh a new input parameter and lines that
responsible of it initialization. The lines should be added to the loop
that treats the appropriate file (sim/file.tcl – the first loop or
octopus/octopus_definitions.h – the second loop). For example,
adding lines that treats the above parameter:
if ( "$line" =~ *set_PARAM* ) then

echo "PARAM $19 ;# set_PARAM" >> "sim/oct_tcl"
set written = 1
endif
3.5.5. Analyzing Simulation Results
The main output of the simulation – the processed results file which
name supplied as an input parameter for test_all.csh script can be
opened in Microsoft Office Excel: Open -> Files of type: All Files (*.*) -
> Delimited -> Comma, and processed accordingly to the desired
information. Useful commands: Insert function (sort, average, sum,
max …) and Insert chart.
4. Octopus Agent Terms
Follows is a list of Octopus Agent specific terms used in this project
and their explanation (in alphabetical order):
Access Node – (used by Find Location Seek Target) is a node whose
Database contains data on both the Source and the Target nodes.
In other words, any node that is located in a cell that is the crossing
of Source’s strip and Target’s strip may be an Access Node. In most
cases, the Access Node is the node that has first found the Target.
Best Bypass Destination – (used by FL Seek Target and FL Reply),
in case FL Seek Target or FL Reply components are unable to find
Best Next Destination and the FL Bypass feature is ON, the Query is
forwarded to the Best Bypass Destination which is node that is
chosen in the same way as Best Next Destination, but without the
restriction of being in the same strip as the current node. In case
more than one suitable node found, the Best Bypass Destination will
be the one closest to the original strip.
Best Next Destination – (used by FL Seek Target and FL Reply) is
the node to whom FL Query will be forwarded by current node. It
may only be a node in current node’s One-Hop Table, and is always
a node located in current node’s strip. The priority of choosing Best
Next Destination is as follows:
° The furthest node in the next to current cell in Sending Direction.
° The furthest node in the one after the next to current cell in
Sending Direction.
° The furthest reachable node in Sending Direction.
° The furthest node in current cell.
Bypass Offsets – (used by FL Seek Target and FL Reply), are the
horizontal and vertical offsets of current FL Seek Target or FL Reply
Query from its original strip.
End Node – (used by Core Strip Update) is a node that does not
have any neighbors in one (or more) of the four geographical
directions, in current strip. End Nodes are the ones that initiate
Strip Updates.
Energy Model – (used for Low Energy Nodes Experiment), is an
attribute of each Mobile Node in NS2 that is responsible for
simulating node’s battery.
Grid – the area covered by Octopus network and divided into
Octopus Strips.
Node’s Database – all node’s Neighbors Tables (One-Hop and
Strips).
Radio Range – currently defined to be 250m, is the range within
which wireless transmission of one node may be received by
another node.
Sending Direction – (used by FL Seek Target and FL Reply) is the
direction in which FL Query should be forwarded across the Grid.

The Sending Direction of each query is defined by Source and
cannot be altered by other nodes.
Source (node) – (used by Find Location Module), is the node that
has initiated the search for the Target, and is the node to receive
the result of FL Query.
Target (node) – (used by Find Location Module), is the node whose
location being searched by the Source.