nonlinear multiobjective optimization - jyväskylän...
TRANSCRIPT
Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Nonlinear Multiobjective
Optimization
Jussi Hakanen, Markus Hartikainen &
Karthik Sindhya
Dept. of Mathematical Information
Technology, University of Jyväskylä,
Finland

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Syllabus
http://users.jyu.fi/~jhaka/uppsala/syllabus.p
df

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Where we come from?
Jyväskylä
University of Jyväskylä
Dept. of Mathematical Information
Technology
Industrial Optimization Group
January 23-27, 2012 Dagstuhl Seminar on Learning in
Multiobjective Optimization
Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
A quick look at single objective
optimization
Jussi Hakanen

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Contents
Introduction to single objective optimization
What is optimization?
Examples of optimization problems
Elements of an optimization problem
Optimality conditions
Solving an optimization problem
Optimization software

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
What is optimization?
”Scientific approach to decision making” –
Prof. Saul I. Gass
Searching for the best solution with respect
to given constraints
Enables systematic search of the best
solution (cf. trial and error)

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Examples of practical optimization
Process design and optimization
Optimal shape design
Portfolio optimization
Route optimization in logistics
Supply chain management
etc.

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Optimization problem
Objective function (cost function) = measure for the goodness of the solution
Variables (decision, design, ...) = values change the solution
Constraints (equality, inequality) = define feasible solutions
Feasible region = all the constraints are satisfied
Parameters = values don’t change during optimization (cf. variables)

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Mathematical formulation
• Feasible region
• Optimality: find 𝑥∗ ∈ 𝑆 such that 𝑓 𝑥∗ ≤ 𝑓 𝑥 ∀ 𝑥 ∈ 𝑆
• Note: solutions of the optimization problems max 𝑓(𝑥) and min−𝑓(𝑥) are the same

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Example1: mixing problem
Refinery produces 3 types of gasoline by mixing 3 different grude oil. Each grude oil can be purchased maximum of 5000 barrels per day. Let us assume that octane values and lead concentrations behave linearly in mixing. Refining costs are 4$ per barrel and the capacity of the refinery is 14000 barrels per day. Demand of gasoline can be increased by advertizing (demand grows 10 barrels per day for each $ used for advertizing).
Determine the production quantities of each type of gasoline, mixing ratios of different grude oil and the advertizing budget so that the daily profit is maximized.

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Mixing problem
Gasoline1 Gasoline2 Gasoline3
Sale price 70 60 50
Lower limit for octane 10 8 6
Upper limit for lead 0.01 0.02 0.01
Demand 3000 2000 1000
Refining costs 4 4 4
Grude oil 1 Grude oil 2 Grude oil3
Purchase price 45 35 25
Octane value 12 6 8
Lead concentration 0.005 0.02 0.03
Availability 5000 5000 5000

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Mixing problem
Variables:
– 𝑥𝑖𝑗 = amount of grude oil 𝑖 used for producing gasoline 𝑗
– 𝑦𝑗 = the amount of money used for advertizing gasoline 𝑗 Net income:
– 𝑥11: 70 − 45 − 4 = 21
– 𝑥12: 60 − 45 − 4 = 11
– 𝑥13: 50 − 45 − 4 = 1
– 𝑥21: 70 − 35 − 4 = 31
– 𝑥22: 60 − 35 − 4 = 21
– 𝑥23: 50 − 35 − 4 = 11
– 𝑥31: 70 − 25 − 4 = 41
– 𝑥32: 60 − 25 − 4 = 31
– 𝑥33: 50 − 25 − 4 = 21

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Mixing problem
Objective function:
– max 21 𝑥11 + 11 𝑥12 + 𝑥13 + 31𝑥21 +21𝑥22 + 11𝑥23 + 41𝑥31 + 31𝑥32 +21𝑥33 − 𝑦1 − 𝑦2 − 𝑦3
Nonnegativity:
– 𝑥𝑖𝑗 ≥ 0 ∀ 𝑖, 𝑗 𝑎𝑛𝑑 𝑦𝑗 ≥ 0 ∀ 𝑗
Capacity:
– 𝑥𝑖𝑗3𝑗=1
3𝑖=1 ≤ 14000

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Mixing problem
Demands:
– Gasoline 1: 𝑥11 + 𝑥21 + 𝑥31 = 3000 + 10𝑦1
– Gasoline 2: 𝑥12 + 𝑥22 + 𝑥32 = 2000 + 10𝑦2
– Gasoline 3: 𝑥13 + 𝑥23 + 𝑥33 = 1000 + 10𝑦3
Availabilities:
– Grude oil 1: 𝑥11 + 𝑥21 + 𝑥31 ≤ 5000
– Grude oil 2: 𝑥12 + 𝑥22 + 𝑥32 ≤ 5000
– Grude oil 3: 𝑥13 + 𝑥23 + 𝑥33 ≤ 5000

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Mixing problem
Octane values:
– Gasoline 1: 12𝑥11+ 6𝑥21+8𝑥31𝑥11+ 𝑥21+𝑥31
≥ 10
– Gasoline 2: 12𝑥12+ 6𝑥22+8𝑥32𝑥12+ 𝑥22+𝑥32
≥ 8
– Gasoline 3: 12𝑥13+ 6𝑥23+8𝑥33𝑥13+ 𝑥23+𝑥33
≥ 6
Lead concentrations:
– Gasoline 1: 0.005𝑥11+ 0.02𝑥21+0.03𝑥31
𝑥11+ 𝑥21+𝑥31 ≤ 0.01
– Gasoline 2: 0.005𝑥12+ 0.02𝑥22+0.03𝑥32
𝑥12+ 𝑥22+𝑥32 ≤ 0.02
– Gasoline 3: 0.005𝑥13+ 0.02𝑥23+0.03𝑥33
𝑥13+ 𝑥23+𝑥33 ≤ 0.01
Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
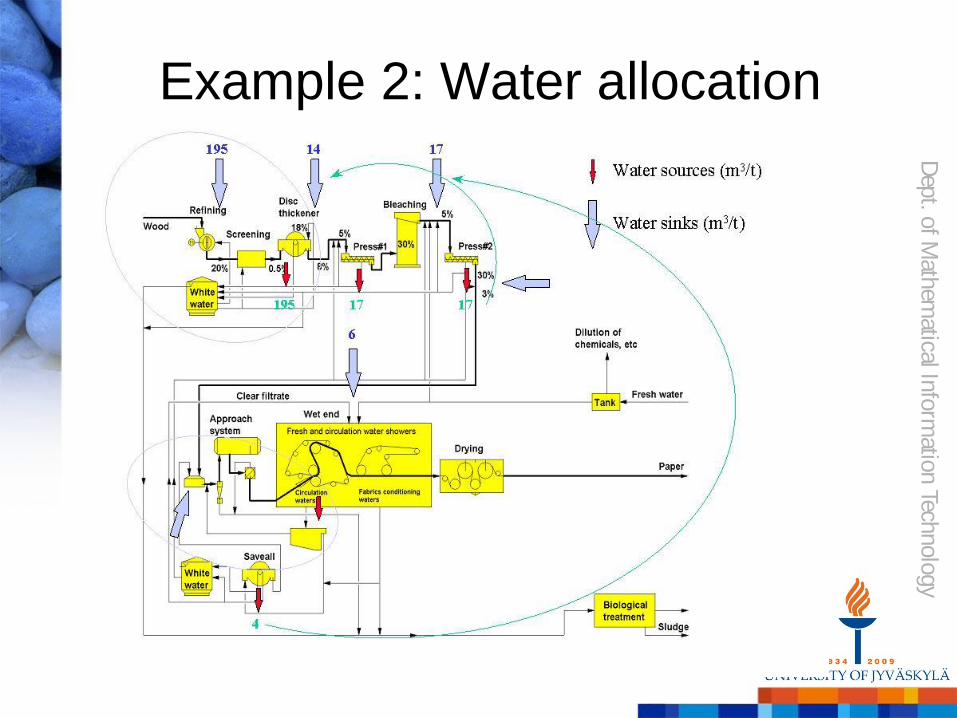
Example 2: Water allocation

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Water allocation
Papermaking process consumes lots of water
Water can be circulated and reused in different parts of the process as long as it remains fresh enough
Fresh water costs
The aim is to minimize the amount of fresh water required by the process
How to formulate the optimization problem?

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Water allocation
Objective function: minimize the amount of fresh water used
Constraints:
– water used should be fresh enough
– Energy and mass balances between the different unit processes (requires a process model)
Can not (usually) be formulated explicitly but requires e.g. the use of a process simulation software

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Different types of optimization
problems
Linear = all functions are linear
Nonlinear = at least one function is nonlinear
Continuous = variables real-valued
Discrete = only finite (or countable) number of
possible values for the variables
Stochastic = problem contains uncertainties
Multiobjective = multiple objective functions

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Different types of optimization
problems
Unconstraint = all values of the variables
are feasible
Box constraints = variables have upper and
lower bounds
Linear constraints = feasible region is
convex polyhedron
Nonlinear constraints = feasible region can
be anything

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Local vs. global optima
-5 -4 -3 -2 -1 0 1 2
-1.5
-1
-0.5
0
0.5
1
1.5
2
minimize sin(x2+x)+cos(3x) -5≤x≤2
global minimum
local minima
Adopted from Prof. Janos D. Pinter

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Local vs. global optima
-4
-2
0
2
4
-4
-2
0
2
-1
0
1
2
-4
-2
0
2
4
Only two variables… → curse of dimensionality
Adopted from Prof. Janos D. Pinter

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
How to find optimal solutions?
Trial and error → widely used in practice, not
efficient and high possibility to miss good
solutions
Better to use a systematic way to find optimal
solution
Typically we know only
– function value(s) at the current trial point
– possibly gradients at the current trial point
How can we know when an optimal solution
has been reached?

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Optimality conditions
How can we know that a solution is optimal?
One way is to utilize optimality conditions
Necessary optimality conditions = conditions
that an optimal solution has to satisfy (does
not guarantee optimality)
Sufficient optimality conditions = conditions
that guarantee optimality when satisfied
1. order conditions (1. order derivatives) and 2.
order conditions (2. order derivatives)
Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
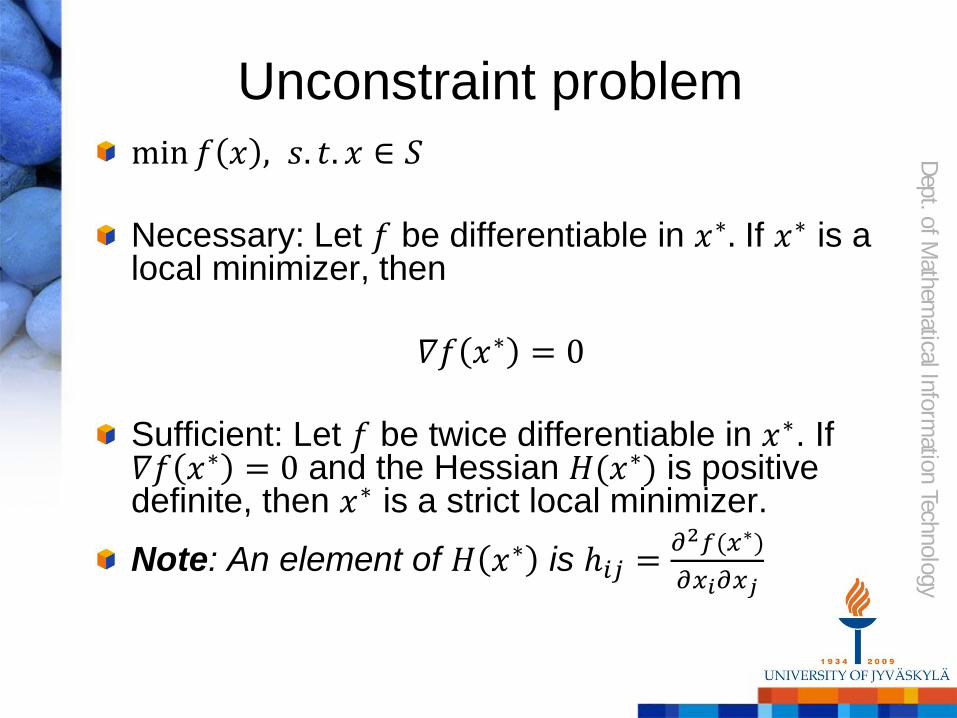
Unconstraint problem
min 𝑓 𝑥 , 𝑠. 𝑡. 𝑥 ∈ 𝑆
Necessary: Let 𝑓 be differentiable in 𝑥∗. If 𝑥∗ is a local minimizer, then
𝛻𝑓 𝑥∗ = 0
Sufficient: Let 𝑓 be twice differentiable in 𝑥∗. If 𝛻𝑓 𝑥∗ = 0 and the Hessian 𝐻(𝑥∗) is positive definite, then 𝑥∗ is a strict local minimizer.
Note: An element of 𝐻 𝑥∗ is ℎ𝑖𝑗 =𝜕2𝑓(𝑥∗)
𝜕𝑥𝑖𝜕𝑥𝑗

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Info: Definite Matrices
A symmetric 𝑛 × 𝑛 matrix 𝐻 is positive
semidefinite if ∀ 𝑥 ∈ ℝ𝑛
𝑥𝑇𝐻𝑥 ≥ 0.
A symmetric 𝑛 × 𝑛 matrix 𝐻 is positive
definite if
𝑥𝑇𝐻𝑥 > 0 ∀ 0 ≠ 𝑥 ∈ ℝ𝑛.

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Example of optimality conditions
-5 -4 -3 -2 -1 0 1 2
-1.5
-1
-0.5
0
0.5
1
1.5
2
minimize sin(x2+x)+cos(3x)
satisfies both necessary and sufficient conditions
satisfies only necessary conditions
Adopted from Prof. Janos D. Pinter

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Unconstraint problem
Adopted from Prof. L.T. Biegler (Carnegie Mellon
University)

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Inequality constraints
Adopted from Prof. L.T. Biegler (Carnegie Mellon
University)

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Inequality and equality constraints
Adopted from Prof. L.T. Biegler (Carnegie Mellon
University)

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Optimality conditions: necessary

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Optimality conditions: sufficient

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Solving an optimization problem
Find optimal values 𝑥∗ for the variables
Problems that can be solved analytically
min 𝑥2, 𝑤ℎ𝑒𝑛 𝑥 ≥ 3 → 𝑥∗ = 3
Usually impossible to solve analytically
Must be solved numerically →
approximation of the solution

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Numerical solution
Modelling → mathematical model of the
problem
Numerical methods → numerical simulation
model for the mathematical model
Optimization method → solve the problem
utilizing the numerical simulation model
SO
modelling → simulation → optimization

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Optimization method
Algorithm: a mathematical description 1. Choose a stopping parameter 𝜀 > 0, starting point 𝑥1 and a
symmetric positive definite 𝑛 × 𝑛 matrix 𝐷1(e.g. 𝐷1 = 𝐼). Set 𝑦1 = 𝑥1 and ℎ = 𝑗 = 1.
2. If 𝛻𝑓(𝑦𝑗) < 𝜀, stop. Otherwise, set 𝑑𝑗 = −𝐷𝛻𝑓(𝑦𝑗). Let 𝜆𝑗 be a solution of
min 𝑓(𝑦𝑗 + 𝜆𝑑𝑗), s.t. 𝜆 ≥ 0.
Set 𝑦𝑗+1 = 𝑦𝑗 + 𝜆𝑗𝑑𝑗. If 𝑗 = 𝑛, set 𝑦1 = 𝑥ℎ+1 = 𝑦𝑛+1, ℎ = ℎ + 1, 𝑗 = 1
and repeat (2).
3. Compute 𝐷𝑗+1. Set 𝑗 = 𝑗 + 1 and go to (2).
Method: numerical methods included
Software: a method implemented as a computer programme

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Local optimization methods
Find a (closest) local optimum
Fast
Usually utilize derivatives
Mathematical convergence
For example
– Direct search methods (pattern search, Hooke & Jeeves, Nelder & Mead, …)
– Gradient based methods (steepest descent, Newton’s method, quasi-Newton method, conjugate gradient, SQP, interior point methods…)

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Global optimization methods
Try to get as close to global optimum as
possible
No mathematical convergence
Do not assume much of the problem
Slow, use lots of function evaluations
Heuristic, contain randomness
Most well known are evolutionary methods
– based on improving a population of
solutions at a time instead of a single
solution

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Hybrid methods
Combination of global and local methods
Try to combine the benefits of both
– rough estimate with a global method,
fine tune with a local method
Challenge: how the methods should be
combined?
– e.g. when to switch from global to local?
(speed vs. accuracy)

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
On selecting a software
Lots of software available (also open
source)
Decision Tree for Optimization Software,
http://plato.asu.edu/guide.html
NEOS Optimization Software Guide,
http://www.neos-guide.org/Optimization-
Guide

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Optimization platforms
AIMMS, http://www.aimms.com/
AMPL, http://www.ampl.com/
GAMS, http://www.gams.com/
Matlab,
http://www.mathworks.com/products/matlab
MPL, http://www.maximalsoftware.com/

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Matlab example (by yourself)
Solve the mixing problem related to oil
refinery introduced earlier with Matlab
Matlab Optimization toolbox
Routine linprog is an optimization method
for linear problems

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Examples of optimization
literature
P.E. Gill et al., Practical Optimization, 1981
M.S. Bazaraa et al., Nonlinear Programming: Theory and Algorithms, 1993
D.P. Bertsekas, Nonlinear Programming, 1995
S.S. Rao, Engineering Optimization: Theory and Practice, 1996
J. Nocedal, Numerical Optimization, 1999
A.R. Conn et al., Introduction to Derivative-Free Optimization, 2009
M. Hinze et al., Optimization with PDE Constraints, 2009
L.T. Biegler, Nonlinear Programming – Concepts, Algorithms, and Applications to Chemical Processes, 2010

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Journals in optimization Applied Mathematics and Optimization
Computational Optimization and Applications
European Journal of Operational Research
Decision Support Systems
Journal of Global Optimization
Journal of Multi-Criteria Decision Analysis
Journal of Optimization Theory and Applications
Mathematical Programming
Omega
Operations Research
Optimization Letters
Optimization Methods and Software
Optimization
SIAM Journal on Control and Optimization
SIAM Journal on Optimization
Structural and Multidisciplinary Optimization
…

Dep
t. of M
athem
atical Info
rmatio
n Tech
nolo
gy
Examples of journals in
application areas
AIChE Journal
American Institute of Aeronautics and Astronautics
Applied Thermal Engineering
Computers & Chemical Engineering
Engineering Optimization
Engineering with Computers
Environmental Modelling & Software
Industrial & Engineering Chemistry Research
Journal of Environmental Engineering and Science
Optimization and Engineering
Water Science and Technology
…