non-rule based fuzzy approach for adaptive control design of nonlinear systems
TRANSCRIPT

NON-RULE BASED FUZZY APPROACH FOR ADAPTIVE CONTROLDESIGN OF NONLINEAR SYSTEMS
Yinhe Wang, Liang Luo, Branko Novakovic, and Josip Kasac
ABSTRACT
A novel adaptive control approach is presented using extended fuzzy logic systems without any rules. First, the extendedfuzzy logic systems without any rules are used to approximate the uncertainties. Then the sliding mode controllers via theproposed extended fuzzy logic systems without any rules are proposed for uniformly ultimately bounded (UUB) nonlinearsystems. The adaptive laws are used for estimating the approximation accuracies of fuzzy logic systems without any rules,Lipschitz constants of uncertain functions and scalar factor, respectively, which are not directly to estimate the coefficients ofbasis functions. Finally, a compared simulation example is utilized to demonstrate the effectiveness of the approach proposed inthis paper.
Key Words: Fuzzy logic systems without any rules, adaptive control, UUB.
I. INTRODUCTION
Fuzzy control design is a fundamental method in thecontrol theory [1–12]. However, in the previously describedconventional fuzzy adaptive control (FAC) methods [1–3,5–7], the Mamdani fuzzy rules or Takagi–Sugeno (T–S) fuzzyrules are employed, and thus two substantial drawbacks areshown. The first is that the exponential growth in rulesaccompanied by the number of variables increases, becausethe input space of the fuzzy logic system (FLS) is generatedvia grid-partition [13,14]. A few works [15–17] present a new,nonconventional analytic method for synthesis of the fuzzycontrol by using fuzzy logic systems without any rules(FWR). However, the output of FWR can not be rewritten asa linear combination of fuzzy basis functions. Hence, theFWR is unsuitably employed in the conventional adaptivefuzzy control algorithms [1–3,5–11].
The second drawback is that FAC easily leads tocomplex adaptation mechanisms. In order to solve thisproblem, more recently several new adaptive fuzzy controlschemes have been proposed in [5–7,18–20] for nonlinear
systems with triangular structure. The general idea of thesemethods is to use the norm of the ideal weighting vector infuzzy logic systems as the estimated parameter, instead of theelements of weighting vector. However, each virtual control-ler needs to induce new state variable. In addition, the abovemethods [5–7,18–20] can be applied only to the FLS withif-then rules, due to the outputs of FLS can be written aslinear combination of fuzzy basis functions. This limits theapplications of the other types of fuzzy logic system such asthe FWR in [15–17].
In order to overcome the above two shortcomings, theFWR are used to approximate the uncertainties of the con-trolled systems. In this paper, in order to put the FWRtogether with the usual adaptive method, the scalar and satu-rator with adjustable parameters are employed and are seriallyconnected with the input port of the FWR to form theextended FWR. By using the extended FWR, the slidingmode controllers via the parameter adaptive laws are pro-posed for a class of nonlinear uncertain systems such that thestates of the controlled systems are uniformly ultimatelybounded (UUB). The parameter adaptive laws in this paperare designed to adjust approximate accuracies of extendedFWR, scalar factor, and Lipschitz constants of uncertainties,respectively, rather than to estimate the coefficients in thelinear combination of fuzzy basis functions. This implies thatthe two processes of constructing the FWR and designingadaptive laws may be separated. This will helpfully serve inthe process of choosing of the suitable FWR for obtainingbetter approximate accuracies. The above idea of adaptivefuzzy control is involved in [21]. However, in [21] the FWRare not employed and the unknown functions are request to becontinuous homogeneous functions, which limit the categoryof unknown functions. In this paper, the FWR are employed
Manuscript received April 14, 2013; revised October 10, 2013; accepted January19, 2014.
Yinhe Wang (e-mail: [email protected]) and Liang Luo (corresponding author,e-mail: [email protected]) are with the School of Automation, Guangdong Uni-versity of Technology, Guangzhou, China.
Liang Luo is also with the College of Mathematics and Information Science,Shaoguan University, Shaoguan, Guangdong, China.
Branko Novakovic (e-mail: [email protected]) and Josip Kasac (e-mail:[email protected]) are with the Faculty of Mechanical Engineering and Naval Archi-tecture, University of Zagreb, HR-10000 Zagreb, Croatia.
This work is supported by the National Natural Science Foundation of China (No.61273219, No. 61305036), National Natural Science Foundation of Guangdong (No.S2013010015768, No. S2013040013503), and Specialized Research Fund for theDoctoral Program of Higher Education of China (20134420110003).
Asian Journal of Control, Vol. 17, No. 1, pp. 1–10, January 2015Published online in Wiley Online Library (wileyonlinelibrary.com) DOI: 10.1002/asjc.893
© 2014 Chinese Automatic Control Society and Wiley Publishing Asia Pty Ltd

and the unknown functions just satisfy Lipschitz conditionsinstead of homogeneous condition. The proposed method inthis paper is a unified adaptive law design scheme suited tothe FWR.
II. FUZZY SYSTEM WITHOUT FUZZYRULE BASE
In this section, the FWR in [15–17] is introduced. Thesefuzzy sets are defined only for the normalized input variableswith the following membership functions
s x
x z or z
x x T
T
ij
j
j ij
iej
ij
j icj
ij
ij
ij
( )
,
cos( )
( )
=
=
− − +−
⎛
0
12 2
1
0
πεε⎝⎝⎜
⎞⎠⎟
< <
− + −−
⎛⎝⎜
⎞2
12 2
1
0,
cos( )
( )
z x z
x T x
T
ij
j iaj
ij
icj
ij
j
ij
ij
πεε ⎠⎠⎟
< <
≤ ≤
⎧
⎨
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
= … =
21
1 1
,
, ,
, , , ,
z x z
z x z
i n j
ibj
j iej
iaj
j ibj
j …… , .m
(1)
where xj are input variables, m is the number of inputvariables and nj is the number of fuzzy sets belonging to thejth input variables. The parameter zi
j0 denotes the beginning
and ziej the end of the ith fuzzy set on the abscissa axis. The
centre of ith fuzzy set is denoted by xicj , while ith fuzzy set
basis is T z zij
iej
ij= − 0 . The parameters εi
j are defined by the
equation: ε εij ie
jij
ibj
iaj i
jz z
z z= −
−>0 1, .
The normalized input variable xj = xj/|xjmax|, xj is jthinput variable, j = 1, . . ., m; xjmax is the maximum valueof xj.
In [15–17], a special distribution of input fuzzy sets isused. This has been done by the following modification of thefuzzy set shape from (1):
s x
x x x
s x
xx x or x xi
jj
iaj
j ibj
ij
j
j ij
jj ia
jj ib( )
,
( )
exp, ,=
≤ ≤
( ) ≤ ≥
1
β εjj
ibj
iaj
j
or x x
i n j m
≥
= =
⎧
⎨⎪⎪
⎩⎪⎪
,
, , , , ,1 1� � (2)
where εij and βj ≥ 0 are free adaptation parameters.
By using (2) and sum/product inference operators, thenew activation function ωj of the jth output fuzzy set can beproposed as
ω j j ij
j
i
n
x s x j mj
( ) ( ), , , .= ==∑
1
1 � (3)
The activation function ωj denotes the grade of mem-bership of input xj to all of the input fuzzy sets.
y xn
x j mjc jj
jj( ) sgn( ), , ,= −
⎛⎝⎜
⎞⎠⎟
=1 1ω
� (4)
where yjc(xj) denotes the normalized position of center of thecorresponding output fuzzy set.
Since the input variables are normalized, it requires adetermination of a gain Kcj of output set center position. The
gain Kcj is proposed as K U F xcj m j ja j= +( )1 , where Um > 0,
Fj > 0 and aj > 0 are the maximum value of the position ofcenter of the corresponding output fuzzy set and free param-eters, respectively.
By using the gain Kcj, the output fuzzy set center posi-tion is obtained as
y U F x y x j mcj m j ja
cj jj= +( ) =1 1( ), , ,� (5)
Finally, the proposed output of the FWR in [15–17] has beendescribed below:
E x x
x y x T
x Tm
j j jc j j ij
ij
j
m
j j j ij( , , )
( ) ( ) ( )
( ) ( )1
1
1
2
1
2
� =
+
+=∑ω ε
εω ε
εεij
j
m
=∑
1
(6)
where the constant Tj is jth fuzzy set basis, εij are adjustable
parameters. More details about the FWR are available in[15–17].
Remark 1. (i) In this new approach the number of fuzzysystem input variables and the number of input fuzzy sets arenot limited. (ii) It can be seen from (6) that the output of FWRmay be not in the usual form (linear constant combination ofthe fuzzy basis functions) In this paper, we propose an adap-tive control scheme for a class of nonlinear uncertain systemsby using scalar, saturator and the output (6) of the FWR.
III. PRELIMINARIES AND THE FWR WITHSCALAR AND SATURATOR
Definition 1. The mapping: ϕ:x = ρx is called a scalar, notingthat ϕ(x) = ρx, where the real ρ is called scalar factor,x x x Rn
T n= ∈( )1 � .
Definition 2 [22]. The mapping: sat:x ↦ sat(x) is called a(vector) saturator, and the saturator function is defined asfollows:
sat x sat x sat xnT( ) ( ( ) ( )) ,= 1 �
2 Asian Journal of Control, Vol. 17, No. 1, pp. 1–10, January 2015
© 2014 Chinese Automatic Control Society and Wiley Publishing Asia Pty Ltd

sat x
x
x x
x
i ni
i i i
i i i
i i i
( )
,
,
,
, , ,=− < −
≤>
⎧⎨⎪
⎩⎪=
α αα
α α1 �
where αi is positive real numbers, and α is the minimumsaturated degree of the whole αi, that is α α=
≤ ≤min{ }1 i n
i .
Remark 2. (i) If αi = 1(i = 1, 2, . . ., n), then sat(x) in Defi-nition 2 is called a normalized unit saturator [22]; (ii) It iseasy to verify that sat(x) = x for ||x|| ≤ α, where ||x|| is theEuclidean norm.
The FWR is shown in Fig. 1 with the output (6) abbreviatedas
y FWR x= ( ) (7)
where x = (x1 . . . xm)T and the knowledge base is notrepresented in the form of the fuzzy if-then rules. From inputinterface to output interface, an intuitive reasoning isintroduced in [15–17] to mapping the input to the centerposition of output fuzzy set by using the activation function(3) and the output fuzzy set center position function (5).
Now, a scalar and saturator are in series with the inputport of FWR in Fig. 1, to form the extended FWR (EFWR).
Here the scalar factor of the input port in Fig. 2 is1
ρ,
and α is the minimum saturated degree of the saturator in theinput port.
From (7) and Fig. 2, the output of the extended FWR isgiven by
y EFWR satx= ⎛
⎝⎜⎞⎠⎟
⎛⎝⎜
⎞⎠⎟ρ
. (8)
Based on the Definition 2, and provided that the inequalityx
ρα≤ is satisfied, the following property holds:
y EFWRx= ⎛
⎝⎜⎞⎠⎟ρ
, where y denotes the output of the extended
FWR.
Lemma 1. Consider a continuous function ψ(z) in a closedbounded set Ω, which satisfies L-Lipschitz conditions. If forreal E > 0 (approximation accuracy), there exists an FWRsuch that the following approximate result is true on the setU z z z Rn= ≤ ∈ ⊆{ , }α Ω,
sup ( ) ( )z
z FWR z E≤
− ≤αψ (9)
then the following approximate property holds on the set U :
sup ( )z
z EFWRz
L z E≤
− ⎛⎝⎜
⎞⎠⎟≤ − +
ραψ
ρ ρ1
1(10)
where the output of the extended FWR (in Fig. 2) is describedwith (8).
IV. SYSTEM DESCRIPTION ANDSOME ASSUMPTIONS
In this paper, we consider the single input single output(SISO) nonlinear system characterized by
x f z gun( ) ( )= + (11)
whe u ∈ R and z x x x U Rn n= ∈ ⊆−( )( )�� �1 T are control inputand state vector, respectively. Let �U be a compact set; f(z) isan unknown continuous function and g is an unknownconstant gain.
In that case the system (11) can be rewritten as
�z Az B f z gu= + +[ ( ) ] (12)
where AO I
On
T= ⎛⎝⎜
⎞⎠⎟
−1
0, B = (OT 1)T, O denotes n − 1 column
vector with all elements 0, In−1 denotes n − 1 order identitymatrix.
Note that the pair (A, B) is completely controllable. Forgiven a positive definite matrix Q and vectorK, one shouldsolve the following equation:
( ) ( )A BK P P A BK QT+ + + = − (13)
for P > 0. Such solution of P exists since A + BK isasymptotically stable.
Assumption 1. For the compact set �U, there exist two knownpositive constants gmin, gmax such that 0 < gmin ≤ g ≤ gmax.
Assumption 2. (i) Consider the system (11), and assume thatthe state set z z U≤{ }⊆α � can be defined by choosing theparameter α. (ii) If Assumption 1 is satisfied, there exists anunknown positive real number E1 and the FWR1 such thatsup ( ) ( )z U
z FWR z E∈
− ≤�σ1 1 1 , where σ1( ) ( )maxz
g
gf z= . (iii)
There exists another FWR2 and an unknown positive real
Fig. 1. Basic configuration of the fuzzy system without rules(FWR).
3Y. Wang et al.: Non-Rule Based Fuzzy Approach for Adaptive Control Design of Nonlinear Systems
© 2014 Chinese Automatic Control Society and Wiley Publishing Asia Pty Ltd

number E2 satisfying sup ( ) ( )z U
z FWR z E∈
−�σ 2 2 2� , where
σ 2( ) maxzg
gKz= − and K is a matrix such that A + BK is
Hurwitz stable.
V. ADAPTIVE FUZZY CONTROL DESIGNBASED ON FWR
In application, Ei, Li, i = 1, 2 are unknown. Let ˆ , ˆE Li i
denote the estimation of Ei, Li, and �E E Ei i i= −ˆ , �L L Li i i= −ˆthe estimate error, respectively. For simplicity, the followingnotations are used.
E E E E E E E E E= = =( ) , ( ) , ( )1 2T
1 2T
1 2T� � � ˆ ˆ ˆ (14a)
L L L L L L L L L= = =( ) , ( ) , ( )1 2T
1 2T
1 2T� � � ˆ ˆ ˆ (14b)
Consider the following extended closed-loop system (ECS).
�z Az B f z gu= + +[ ( ) ] (15a)
�ρ η ρ= ( , , , )z E Lˆ ˆ (15b)
ˆ ( , , ˆ )�E z E=ϑ ρ1
(15c)
ˆ ( , , ˆ)�L z L=ϑ ρ2
(15d)
u u z= ( , )ρ (15e)
where the state vector of the ECS (15) is Z = ( , , , )T T T Tz E Lρ ˆ ˆ .The mappings η(*) (the updated law of the parameter ρ),ϑ1(*), ϑ2(*) (the adaptive law of estimate value of E and L,respectively) and the controller u = u(z, ρ) will be designedaccording to the following control goal.
Control goal. Design the controller (15e), updated law (15b)and adaptive laws (15c) and (15d) such that the state vectorZ = ( , , , )T T Tz E Lρ ˆ ˆ is uniformly ultimately bounded (UUB).
Case 1. ||z|| > |ρ|α
In this case, we adopt open-loop control, that is u = 0, and usethe FWR1 to approximate the nonlinear function σ1(z). Mean-while, the updated law of ρ = ρ(t) is proposed as follows:
�ρρα
λ= + − + ⋅ +( ){1
22 1 2
2
21 1n z z E EFWRˆ (16)
where λ is an adjustable positive constant.The adaptive laws of the estimated parameter vector are
proposed as follows:
ˆ , ˆ , ˆ , ˆ ,� � � �E x E L L1 1 2 1 22 0 0 0= = = =β (17)
with β1 being a positive design constant.We use the following Lemma 2 in order to prove that the
state Z = ( , , , )T T Tz E L Tρ ˆ ˆ of the ECS (15) can reach D = {Z|||z|| ≤ |ρ|α} in finite time.
Lemma 2. Consider the ECS (15). If Assumptions 1 and 2,and the condition ||z|| > |ρ|α are true, then the above controlleru = 0 and the updated laws, described by (16) and (17), can beensured to force the state Z = ( , , , )T T Tz E L Tρ ˆ ˆ of the ECS (11)to reach the compact set D = {Z| ||z|| ≤ |ρ|α} in finite time.
Proof. See Appendix A.
Remark 3. (i) In the open-loop case, the updated law (16)ensures that the SSs can go into the effective range of thesaturator. (ii) FWR1 is used to approximate the unknownfunction f(z) and to obtain the available information of theirupper boundary.
Case 2. ||z|| ≤ |ρ|α
In this case, the two EFWRi, i = 1, 2, are employed to syn-thesize the controller u = u1 + u2, where
Fig. 2. The extended FWR (EFWR) with scalar and saturator.
4 Asian Journal of Control, Vol. 17, No. 1, pp. 1–10, January 2015
© 2014 Chinese Automatic Control Society and Wiley Publishing Asia Pty Ltd

ug
EFWRz
1 11= − ⎛
⎝⎜⎞⎠⎟max ρ
(18a)
ug
EFWRz
2 21= − ⎛
⎝⎜⎞⎠⎟max ρ
(18b)
The updated law of ρ is proposed as follows:
�
�
ρ λλ
ρ γραρ
γ ρ α
= − − − +
−
min
max
21 2
( )
2 ( )2 1
1( )
2 ( ) (
Q
PPB L L
sign PB E
ˆ ˆ
ˆ11 2)+ E
(19)
where γ is a positive design constant, and
sign�( ),
,ρ
ρρ
=>
− <⎧⎨⎩
1 0
1 0.
The related adaptive laws are proposed as follows:
ˆ ( )
( )ˆ�
EQ
PE PB1 1 12= − +λ
λδ ρ αmin
max
(20a)
ˆ ( )
( )ˆ�
EQ
PE PB2 2 12= − +λ
λδ ρ αmin
max
(20b)
ˆ ( )
( )ˆ�
LQ
PL PB1 1 2
2 22 11= − + −λ
λδ ρ α
ρmin
max
(20c)
ˆ ( )
( )ˆ�
LQ
PL PB2 2 2
2 22 11= − + −λ
λδ ρ α
ρmin
max
(20d)
where δ1, δ2 are positive design constants.
Lemma 3. Consider the ECS (15). If Assumptions 1 and 2and the condition ||z|| ≤ |ρ|α are satisfied, then Controller (18),Updated law (19) and Adaptive law (20) ensure that the stateZ = ( , , , )T T Tz E L Tρ ˆ ˆ is uniformly ultimately bounded (UUB).
Proof. See Appendix B.
Remark 4. (i) The controller u1 consists of extended FWR1
in form of Fig. 2, which serves against the affection of theunknown function in f(z). The controller u2 is in switchedform to overcome the uncertainties in σ2(z). (ii) The updatedlaw (19) is not directly connected with the state z of thesystem (11) but is connected with the estimate values ofapproximate accuracies of the FWRi, i = 1,2.
Theorem 1. If Assumptions 1 and 2 are satisfied, then thestate Z = ( , , , )T T Tz E L Tρ ˆ ˆ of the closed-loop system (15),associated with the control law and the adaptive laws in Case1 and 2, are uniformly ultimately bounded (UUB).
Remark 5. (i) Adaptive laws have nothing to do with fuzzybasis functions. From the expression (19), we clearly see thatthe adaptive law in this paper is not directly related to thefuzzy basis functions. The same conclusion can be obtainedin the expressions (16). In the conventional adaptive fuzzymethods, the adaptive laws are used to adjust the parameterswith respect to the fuzzy basis functions. In this sense, onebasis function needs to have one adaptive law that suffersfrom combinatorial rule explosion. (ii) The FWR can beemployed in this approach. In [7–11], usually the fuzzyapproximators have been used where the structure of outputsis a linear combination of fuzzy basis functions (such asMamdani or TS type) in order to approximate nonlinearterms. These approximators can be easy used for adaptivetechnique in order to adjust the coefficients of the fuzzy basisfunction. But at the same time it brings restriction to us: whenthe approximation’s structure of output is not in a linearcombination of fuzzy basis functions (such as FWR), theprevious methods [7–11] are ineffective. The approach pro-posed in this paper is effective in avoiding this problem.
VI. SIMULATION
In this section, we apply the proposed controller in thispaper to an inverted pendulum system under different initialconditions. Consider the following second-order model of theinverted pendulum system:
��x x
x f z gu t d t1 2
2
== + +( ) ( ) ( )
(21)
where z x x= ( , )� T, x1 = θ(rad) and x rad s2 = �θ( ). u(N) is theapplied force (control). Further, d(t) = sin(πt)cos(πt) is thedisturbance. The smooth functions f(z) and g are unknown forsynthesizing the controller in this paper. Assume that f(0) = 0,1 ≤ g ≤ 2.
We choose the design parameters as:β1 = δ1 = δ2 = 0.0001, γ = 1, λ = 1, the minimum saturateddegree α = 1. ρ(0) = 6, ˆ ( ) .E1 0 0 4= , ˆ ( ) .E2 0 0 6= , ˆ ( ) .L1 0 0 8= ,ˆ ( ) .L2 0 0 5= .
Based on the design ideas in this paper, we will need toconstruct two FWR for approximating the following nonlin-ear functions.
For the first nonlinear function σ1 = −gmaxg−1Kz, whereK = (−30 −40), by using the methods in [15–17], we choosethe parameters of FWR shown in Tables I–III.
For the second nonlinear function σ2 = f(z), the mostsimple form of the analytic function is considered (moredetails about the method may be seen in literature [15]).
ω γ γ α βji ji ji ji ji ji ji j ji jix S x x x( ) ( ) exp= = + − −( )2 (22a)
5Y. Wang et al.: Non-Rule Based Fuzzy Approach for Adaptive Control Design of Nonlinear Systems
© 2014 Chinese Automatic Control Society and Wiley Publishing Asia Pty Ltd

yc kc x sign xji ji ji ji ji= − −( )( )1 exp ( )β (22b)
where j = 1, 2, i = 1, . . ., Nj, Nj = 1, αji = 0.The following two cases are considered in simulation.
Condition 1. The smaller initial condition statex1(0) = 0.19 ≈ 11°.
Fig. 3 shows the time responses of the angle in [5] (noted asCB) and [2] (noted as FLS) and the method proposed in thispaper (noted as FWR). Fig. 4 is a locally-enlarged picture ofFig. 3. It is seen clearly that the controller in [2] fails toconverge, while the controller in [5] and the controller in thispaper still converges. Additionally, the controller in this paperhas a shorter response time. Fig. 5 shows the updated law, andFig. 6 shows the estimate value of approximate accuracies forthe two FWR and Lipschitz constant. From Fig. 5 and Fig. 6,it can also be observed that the proposed updated law,approximate accuracies and Lipschitz constant in this paperquickly converge to zero.
Condition 2. The same simulation as Example 1 is performedexcept that the large initial condition state x1(0) = 1 ≈ 57°.
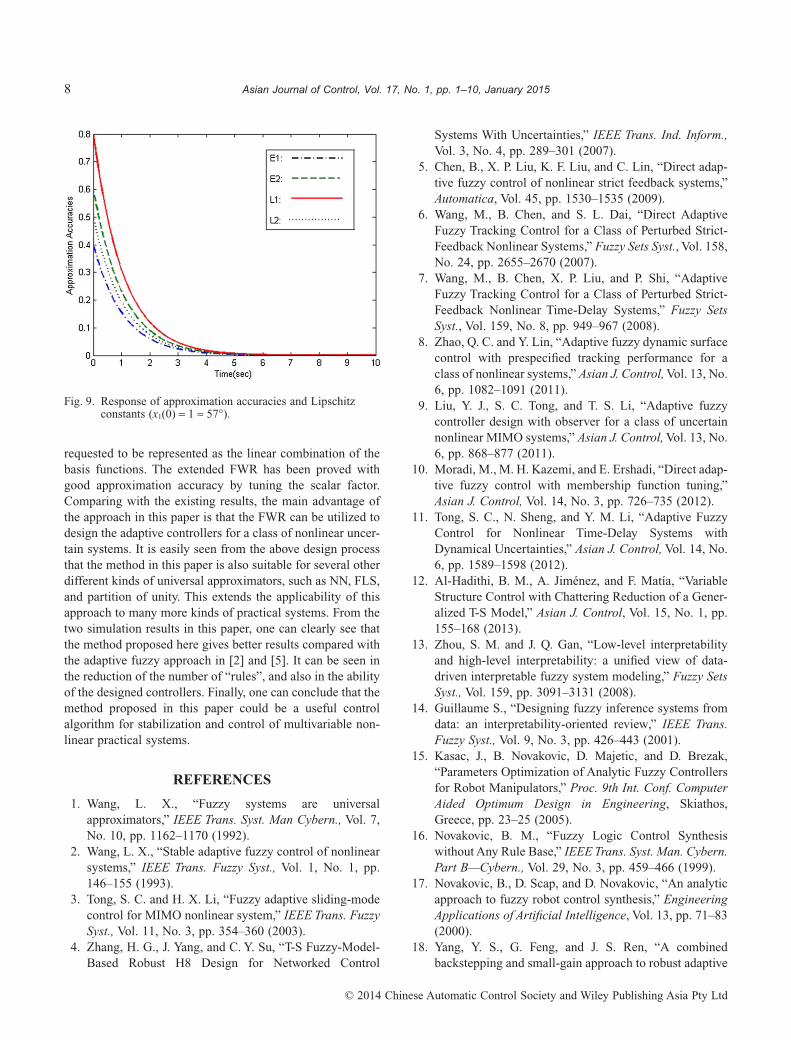
Fig. 7 shows the angular response by extended FWR in thispaper and the work in [5]. It can be seen that the proposedadaptive controller in this paper remains stable for the largeinitial condition, while the controller in [5] is out of the work.The updated law is shown in Fig. 8. The estimate values ofapproximate accuracies and Lipschitz constants, shown inFig. 9, also tend to zero.
Remark 6. The above simulation is compared with Wang’swork [2] and Chen’s method [5]. Wang and Chen employed afuzzy adaptive approach, which contains 25 adaptive lawsand one adaptive law, respectively. Wang’s work uses thetraditional fuzzy adaptive method. It is easy to create theproblem of exponential growth in the number of fuzzy rulesfor the multivariable nonlinear systems. Note that Wang’smethod uses the smallest initial angle. When the initial angle
Table I. Basis parameters of input fuzzy sets.
Fuzzyset NO.
Adaptableparameter ε
Base offuzzy set
Fuzzy setcenter
1 2 2 02 2 2 03 2 2 0
Table II. Basis parameters of activation function.
Input variable NO. X1 X2
Xmax 100 100Parameter β 0.25 0.01
Table III. Basis parameters of output fuzzy sets.
Output fuzzy set no. 1 2
Parameterα 0.05 0.02Gain F 0.06 0.01Gain Um 10 10ParameterT0 10 8Parameterε0 20 30
Table IV. Basis parameters of out fuzzy sets.
Output fuzzy set NO. 1 2
Gain Kc 100000 300Parameterβ 100000 1Parameterγ 0.5 0.5ParameterI 0.01 1
Fig. 3. Response of state variable x1(x1(0) = 0.19 ≈ 11°).
Fig. 4. Locally-enlarged picture of Fig. 3.
6 Asian Journal of Control, Vol. 17, No. 1, pp. 1–10, January 2015
© 2014 Chinese Automatic Control Society and Wiley Publishing Asia Pty Ltd

becomes bigger, Wang’s method ceases to work, but Chen’sapproach and the method proposed in this paper can stillguarantee the system stability. Comparing the number ofadaptive laws, one can see that Chen’s work uses only oneadaptive law. From the analysis of Chen’s work designprocess, we can conclude that the reduction of the number ofadaptive laws lies in the cost of bringing in the extra numbersof state variables. In other words, when the number of statevariables becomes bigger, the fuzzy basis functions becomemore and more complex in Chen’s work. Therefore, when theinitial angle reaches 40o, Chen’s method ceases to work. Inthis simulation, we employed five adaptive laws to guaranteesystem stability, including four approximation accuracies andone updated law. From the point view of computational terms,
the method proposed in this paper effectively reduces thenumber of adaptive laws, and deals online with themultivariable-fuzzy adaptive control problem. In that sense,the method proposed in this paper offers an efficient approachfor reducing the number of adaptive laws and promoting thestability of nonlinear multivariable systems.
VII. CONCLUSION
A novel adaptive method based on the FWR, for designof control and stability of n-order nonlinear systems, has beenproposed in this paper. This method efficiently reduces thenumber of adaptive laws and relaxes the restriction on uni-versal approximators to be chosen, whose outputs are not
Fig. 5. Response of updated law ρ (x1(0) = 0.19 ≈ 11°).
Fig. 6. Response of approximation accuracies and Lipschitzconstants (x1(0) = 0.19 ≈ 11°).
Fig. 7. Response of state variable x1(x1(0) = 1 ≈ 57°).
Fig. 8. Response of updated law ρ(x1(0) = 1 ≈ 57°).
7Y. Wang et al.: Non-Rule Based Fuzzy Approach for Adaptive Control Design of Nonlinear Systems
© 2014 Chinese Automatic Control Society and Wiley Publishing Asia Pty Ltd
requested to be represented as the linear combination of thebasis functions. The extended FWR has been proved withgood approximation accuracy by tuning the scalar factor.Comparing with the existing results, the main advantage ofthe approach in this paper is that the FWR can be utilized todesign the adaptive controllers for a class of nonlinear uncer-tain systems. It is easily seen from the above design processthat the method in this paper is also suitable for several otherdifferent kinds of universal approximators, such as NN, FLS,and partition of unity. This extends the applicability of thisapproach to many more kinds of practical systems. From thetwo simulation results in this paper, one can clearly see thatthe method proposed here gives better results compared withthe adaptive fuzzy approach in [2] and [5]. It can be seen inthe reduction of the number of “rules”, and also in the abilityof the designed controllers. Finally, one can conclude that themethod proposed in this paper could be a useful controlalgorithm for stabilization and control of multivariable non-linear practical systems.
REFERENCES
1. Wang, L. X., “Fuzzy systems are universalapproximators,” IEEE Trans. Syst. Man Cybern., Vol. 7,No. 10, pp. 1162–1170 (1992).
2. Wang, L. X., “Stable adaptive fuzzy control of nonlinearsystems,” IEEE Trans. Fuzzy Syst., Vol. 1, No. 1, pp.146–155 (1993).
3. Tong, S. C. and H. X. Li, “Fuzzy adaptive sliding-modecontrol for MIMO nonlinear system,” IEEE Trans. FuzzySyst., Vol. 11, No. 3, pp. 354–360 (2003).
4. Zhang, H. G., J. Yang, and C. Y. Su, “T-S Fuzzy-Model-Based Robust H8 Design for Networked Control
Systems With Uncertainties,” IEEE Trans. Ind. Inform.,Vol. 3, No. 4, pp. 289–301 (2007).
5. Chen, B., X. P. Liu, K. F. Liu, and C. Lin, “Direct adap-tive fuzzy control of nonlinear strict feedback systems,”Automatica, Vol. 45, pp. 1530–1535 (2009).
6. Wang, M., B. Chen, and S. L. Dai, “Direct AdaptiveFuzzy Tracking Control for a Class of Perturbed Strict-Feedback Nonlinear Systems,” Fuzzy Sets Syst., Vol. 158,No. 24, pp. 2655–2670 (2007).
7. Wang, M., B. Chen, X. P. Liu, and P. Shi, “AdaptiveFuzzy Tracking Control for a Class of Perturbed Strict-Feedback Nonlinear Time-Delay Systems,” Fuzzy SetsSyst., Vol. 159, No. 8, pp. 949–967 (2008).
8. Zhao, Q. C. and Y. Lin, “Adaptive fuzzy dynamic surfacecontrol with prespecified tracking performance for aclass of nonlinear systems,” Asian J. Control, Vol. 13, No.6, pp. 1082–1091 (2011).
9. Liu, Y. J., S. C. Tong, and T. S. Li, “Adaptive fuzzycontroller design with observer for a class of uncertainnonlinear MIMO systems,” Asian J. Control, Vol. 13, No.6, pp. 868–877 (2011).
10. Moradi, M., M. H. Kazemi, and E. Ershadi, “Direct adap-tive fuzzy control with membership function tuning,”Asian J. Control, Vol. 14, No. 3, pp. 726–735 (2012).
11. Tong, S. C., N. Sheng, and Y. M. Li, “Adaptive FuzzyControl for Nonlinear Time-Delay Systems withDynamical Uncertainties,” Asian J. Control, Vol. 14, No.6, pp. 1589–1598 (2012).
12. Al-Hadithi, B. M., A. Jiménez, and F. Matía, “VariableStructure Control with Chattering Reduction of a Gener-alized T-S Model,” Asian J. Control, Vol. 15, No. 1, pp.155–168 (2013).
13. Zhou, S. M. and J. Q. Gan, “Low-level interpretabilityand high-level interpretability: a unified view of data-driven interpretable fuzzy system modeling,” Fuzzy SetsSyst., Vol. 159, pp. 3091–3131 (2008).
14. Guillaume S., “Designing fuzzy inference systems fromdata: an interpretability-oriented review,” IEEE Trans.Fuzzy Syst., Vol. 9, No. 3, pp. 426–443 (2001).
15. Kasac, J., B. Novakovic, D. Majetic, and D. Brezak,“Parameters Optimization of Analytic Fuzzy Controllersfor Robot Manipulators,” Proc. 9th Int. Conf. ComputerAided Optimum Design in Engineering, Skiathos,Greece, pp. 23–25 (2005).
16. Novakovic, B. M., “Fuzzy Logic Control Synthesiswithout Any Rule Base,” IEEE Trans. Syst. Man. Cybern.Part B—Cybern., Vol. 29, No. 3, pp. 459–466 (1999).
17. Novakovic, B., D. Scap, and D. Novakovic, “An analyticapproach to fuzzy robot control synthesis,” EngineeringApplications of Artificial Intelligence, Vol. 13, pp. 71–83(2000).
18. Yang, Y. S., G. Feng, and J. S. Ren, “A combinedbackstepping and small-gain approach to robust adaptive
Fig. 9. Response of approximation accuracies and Lipschitzconstants (x1(0) = 1 ≈ 57°).
8 Asian Journal of Control, Vol. 17, No. 1, pp. 1–10, January 2015
© 2014 Chinese Automatic Control Society and Wiley Publishing Asia Pty Ltd

fuzzy control for strict feedback nonlinear systems,”IEEE Trans. Systems Man Cybern. A—Syst. Hum., Vol.34, No. 3, pp. 406–420 (2004).
19. Yang, Y. S. and C. J. Zhou, “Robust adaptive fuzzy track-ing control for a class of perturbed strict feedback non-linear systems via small-gain approach,” Inf. Sci., Vol.170, pp. 211–234 (2005).
20. Yang, Y. S. and C. J. Zhou, “Adaptive fuzzy H8 stabili-zation for strict feedback canonical nonlinear systems viabackstepping and small-gain approach,” IEEE Trans.Fuzzy Syst., Vol. 13, No. 1, pp. 104–114 (2005).
21. Luo, L., Y. H. Wang, Y. Q. Fan, and Y. Zhang, “Noveladaptive control design for nonlinear systems withextended partition of unity,” Asian J. Control, Vol. 15,No. 3, pp. 911–918 (2013).
22. Haitham, H. and B. Stephen, “Analysis of linear systemswith saturation using convex optimization,” Proc. the37th IEEE Conf. Decis. Control, Tampa, FL, pp. 903–908 (1998).
VIII. APPENDIX A
8.1 Proof of Lemma 2
Let S z E E E E L L= − + + +− −2 2 21
11 1 2 2 2
11 1
1
2
1
2ρ α β β( ) (� � � � � �T T T
L L+ 2 2)� �T . It is easy to see that the condition ||z|| > |ρ|α meansS > 0. Consider the positive definition function about
V S121
2= . The derivative of V1 about t along the ECS (11) is
obtained as follows
� �
� � � � � � �
�
V SS
S z z z z E E E E
L
1
T T 21
11T
1 2T
2
21
[ 2 ( )
(
=
= − − + +
+
−
−
ρρα β
β
ˆ ˆ
11T
1 2T
2
2 T1 1
21
11
)]
[2 1 2
2 (
ˆ ˆ� � �
� �
L L L
S n z z B E EFWR
E
+≤ − + +( )− + −ρρα β TT
1 2T
2 21
1T
1 2T
2) ( )]
.
ˆ ˆ ˆ ˆ� � � � � � �E E E L L L L
S
+ + += −
−βλ
Obviously, it is true that {Z|S = 0} ⊆ D. This completes theproof of Lemma 2.
IX. APPENDIX B
9.1 Proof of Lemma 3
Description of the closed-loop system, composed of thecontroller (18), updated law (19), adaptive laws (20) and thesystem (12), is given by the relation:
�z Az B f gu
A BK z Bg g Kz u g f u
= + += + + − + + +− −
[ ]
( ) [ ]11
12
Consider the positive definite function:
V z Pz E E E E L L L L22
11 1 2 2
21 1 2 2
1
2
1
2
1
2= + + + + +T T T T T
γρ
δ δ( ) ( ).� � � � � � � �
If Assumptions 1 and 2 are true, the derivative of V2(t) alongthe closed-loop system (12) is given by
�VQ
PV t
Q
PL L2
min
max2
min
min2
112
22
1( )
( )( )
( )
( )[ ( )≤ − + + +− −λ
λλλ
δ δ2
1112
22
min
min
21 2
( )]
( )
2 ( )2 1
1( )
E E
Q
PPB L L
L
+
+ + − +⎡⎣⎢
+
ργ
λλ
ρ γραρ
ˆ ˆ
�11 2
1 min
min1
2 22
11
2 21
( )
( )2 1
1δ λλ
ρ αρ
δ
δ
− −
−
− − +⎛⎝⎜
⎞⎠⎟
+
Q
PL PB L
L
ˆ �
� λλλ
ρ αρ
δ
δ λ
min
min2
2 22
12
1 11 min
( )
( )2 1
1
(
Q
PL PB L
E
ˆ ˆ− − +⎛⎝⎜
⎞⎠⎟
+
−
−
�
PE PB E
EQ
PE
)
( )2
min1 1λ
ρ α δ
δ λλ
ˆ ˆ
( )
( )ˆmin
min
− +⎛⎝⎜
⎞⎠⎟
+
−
−
11
2 11
�
�22 12− +⎛
⎝⎜⎞⎠⎟
−ρ α δPB E12
�
(C.1)
Substituting the updated laws (19) and (20) into (C.1) oneobtains that
�VQ
PV t
Q
P2 2
2≤ − +λ
λλλ
min
max
min
max
( )
( )( )
( )
( )Θ (C.2)
where Θ = + + +− −[ ( ) ( )]δ δ21
12
22
11
12
22L L E E .
Pre and post multiplying (C.2) by eQ
Pt
χχ
min
max
( )
( ) and then
integrating the result from 0 to t show that
V t e VQ
Pe
Q
Pt
Q
2 2 02
( ) ( )( )
( )
min
max
min
max
( )
( ) min
max
( )
(≤ +−λλ
λλλ
λΘ PP
t
Q
Pt
d
e V
)
( )
( )min
max ( )
τ
λλ
τ0
2 01
2
∫⎡
⎣⎢
⎤
⎦⎥
≤ +−
Θ
(C.3)
It is concluded from (C.3) that if tP
Q V≥ − χ
χεmax
min
( )
( )ln
( )2 0
for a given positive design real ε, then V21
2≤ +ε Θ
holds. This means that the state convergent intothe neighborhood Ω in finite times, where
Ω Θ= ≤ +{ }( )X E E L L VT |ρ ε� � � �1 2 1 2
1
2. Therefore, the
following inequalities are obtained: zP
≤ +ελ
0 5.
( )min
Θ,
ρ γ ε≤ +2 0 5( . )Θ , � �E E12
22
12 0 5+ ≤ +δ ε( . )Θ , � �L L12
22+ ≤
22 0 5+δ ε( . )Θ .This completes the proof of Lemma 3.
9Y. Wang et al.: Non-Rule Based Fuzzy Approach for Adaptive Control Design of Nonlinear Systems
© 2014 Chinese Automatic Control Society and Wiley Publishing Asia Pty Ltd

Yinhe Wang received the M.S. degree inmathematics from Sichuan Normal Univer-sity, Chengdu, China, in 1990, and thePh.D. degree in control theory and engi-neering from Northeastern University,Shenyang, China, in 1999. From 2000 to2002, he was Post-doctor in Department of
Automatic control, Northwestern Polytechnic University,Xi’an, China. From 2005 to 2006, he was a visiting scholar atDepartment of Electrical Engineering, Lakehead University,Canada. He is currently Professor with the Faculty of Auto-mation, Guangdong University of Technology, Guangzhou,China. His research interests include fuzzy adaptive robustcontrol, analysis for nonlinear systems and complexdynamical networks.
Liang Luo received the M.S. and Ph.D.degree in the faculty of applied mathemat-ics and the Faculty of Automation fromGuangdong University of Technology,Guangzhou, China, in 2008 and 2011. Sheis currently a lecturer with college of math-ematics and information science, Shaoguan
University, Shaoguan, Guangdong, China. Her research inter-ests include nonlinear systems and adaptive robust control.
Branko Novakovic is Professor Emeritusin the Department of Robotics and Auto-mation of Manufacturing Systems atFaculty of Mechanical Engineering andNaval Architecture,University of Zagreb,Croatia. Prof. Novakovic received his Ph.D.in Mechanical Engineering from the Uni-
versity of Zagreb in 1978. His research interests includecontrol systems, robotics, neural networks, and fuzzy control.He is author of two books: Control Systems (1985), andControl Methods in Robotics, Flexible ManufacturingSystems and Processes (1990) and co-author of a book Arti-ficial Neural Networks (1998).
Josip Kasac is Associate Professor in theDepartment of Robotics and Automation ofManufacturing Systems at Faculty ofMechanical Engineering and Naval Archi-tecture, University of Zagreb, Croatia. Dr.Kasac received his Ph.D. in MechanicalEngineering from the University of Zagreb
in 2005. His research interests include control of nonlinearmechanical systems, repetitive control systems, optimalcontrol and fuzzy control.
10 Asian Journal of Control, Vol. 17, No. 1, pp. 1–10, January 2015
© 2014 Chinese Automatic Control Society and Wiley Publishing Asia Pty Ltd