neural network models for intelligent networks: deriving the location
TRANSCRIPT

Neural network modelsfor intelligent networks:deriving the location fr om signal patterns
RobertoBattiti, AlessandroVillani, andThangLe Nhat
Universit̀a di Trento,Dipartimentodi Informaticae Telecomunicazionivia Sommarive 14, I-38050Povo (TN), Italy
battiti|avillani|[email protected]
Abstract. The knowledge of the locationof a mobile terminalcanbe usedtoreducethecognitiveburdenon theusersin context–awaresystemsandit is acru-cial informationfor routing in ad–hoc networks andfor optimizingthetopologyin orderto minimize theenergy consumptionof the nodes.Thestrengthsof theRF signalsarriving from moreaccesspointsarerelatedto theposition(locationfingerprinting), but the complexity of the inverseproblemto derive thepositionfrom thesignalsandthelackof completeinformation,motivateto considerflexi-blemodelsbasedonanetwork of functions(neural networks), developedthrougha supervisedlearningstrategy.Theadvantageof themethodis thatit doesnotrequiread-hocinfrastructurein ad-dition to thewirelessLAN, while theflexible modellingandlearningcapabiliti esof neuralnetworksachievesmallerrorsin determiningtheposition,areamenableto incrementalimprovements,anddo not requirethe detailedknowledgeof theaccesspoint locationsandof the building characteristics.The systemdoesnotparticipatein anactive mannerto determinetheposition,thereforeguaranteeinga completeprivacy.Experimentalresultsandcomparisonswith alternative techniquesarepresentedanddiscussed.
Keywords: location- andcontext-awarecomputing,wirelessLAN, IEEE 802.11b,neural networks,machinelearning.
1 Intr oduction
Theresearchin thispaperproposesanew methodto determinethelocationof amobileterminal.Knowledgeof the locationandsuitablemodelsareimportant in order to re-ducethecognitiveburdenontheusersin context- andlocation-awaresystems[7,1,14].Locationawarenessis consideredfor examplein theinfostation-basedhoardingworkof[12], andin thewebsignsystemof [15]. In addition,thelocationof mobileterminalsisrequiredby techniquesfor routing in ad–hocnetworksandfor optimizing thetopologyin orderto minimize theenergy consumption of thenodes,seefor example [13].
Therefore,many different systemand technologies to determine the location ofusersfor mobilecomputing applications havebeenproposed.BesidesGlobalPosition-ing System(GPS),usedverysuccessfullyin open areasbut ineffectiveindoor, thereare

severalindoor locationtechniquessuchasActiveBadge[19] usinginfraredsignals,Ac-tive Bat[20,9], Cricket[16], usinga combinationof RF andultrasound to estimatethedistance,PinPoint3D-iD[21],RADAR[2], Nibble[6] andSpotON[10], usingRF-basedlocationdetermination.
Thecurrentpaperconsidersahigh-speedwirelessLAN environment usingtheIEEE802.11bstandard. Themethod is basedonneural network modelsandautomatedlearn-ing techniques.As it is thecasefor theRADAR system,nospecial-purposeequipmentis neededin addition to the wirelessLAN, while the flexible modellingandlearningcapabilitiesof neuralnetworks achieve lower errors in determining the position, areamenable to incrementalimprovements,anddo not requirethedetailedknowledgeoftheaccesspoint locationsandof thebuilding characteristicsin additionto a mapof theworking space.Preliminary resultsof this work arepresentin [5].
The following part of this paperis organizedas follows. Section2 describes themethodology for modelling the input-output relationship through multi-layer percep-tronneuralnetworks,Section3describesthesystemandthecollectionof datapointsfortheexperiments,Section4 analyzesthedistanceerror resultsobtained from theneuralnetwork andSection5 discussestheresultsobtained by usingthek-nearest-neighborsmethod. Theeffects of thesignalvariability on thepositionerror areassessedin Sec-tion 6.
2 Methodology: Modelsbasedon neural networks
In our systemthesignalstrengthsreceivedat a mobile terminalfrom differentaccesspoints(at leastthree)areusedto determinethepositionof theterminal insideaworkingarea.Thestartingpoint of the method is the relationship betweendistanceandsignalstrengthfrom a givenaccesspoint.Detailedradiopropagationmodelsfor indoor envi-ronmentsareconsideredfor example in [2]. If oneknowsdistances
���from themobile
terminal to at leastthreedifferent APs, onecancalculatethe positionof the mobileterminalin thesystem.
In a variegatedandheterogeneous environment, e.g.insidea building or in a com-plex urban geometry, the received power is a very complex function of the distance,thegeometry of walls, the infrastructurescontained in thebuilding. Evenif a detailedmodelof the building is available,solving the direct problem of deriving the signalstrengthgiven the locationrequiresa lengthysimulation.The inverseproblem,of de-riving the locationfrom thesignalstrengths is morecomplicatedandvery difficult tosolve in realisticsituations.
Neural network modelsandautomatedlearning techniquesareaneffectivesolutionto estimatethelocationandto reducethedistanceerror. Thenon-lineartransformationof eachunit anda sufficiently large numberof freeparametersguaranteethata neuralnetwork is capableof representing therelationshipbetweeninputs(signalstrengths)andoutputs (position). Let us notethat the distancefrom the accesspoints, andthereforethedetailedknowledgeof theirposition, is not requiredby thesystem:ausermaytrainandusethemethodwithoutaskingfor this information.
Thespecificationof thefreeparametersof themodel(alsocalled”weights” of thenetwork) requiresa learningstrategy thatstartsfrom a setof labelledexamplesto con-

LayerHidden
AP1’s Signals AP2’s Signals AP3’s Signals
X Y
Output Layer
Input Layer
Fig.1. An exampleof multi-layerperceptronconfiguration
structamodelthatwill thengeneralizein anappropriatemannerwhenconfrontedwithnew data,notpresent in thetrainingset.
We considerthe“standard” multi-layerperceptron (MLP) architecture, seefor ex-ampleFig. 1, with weightsconnecting only nearby layersand the sum-of-squared-differencesenergy function defined as:
������� ���������
� � ����������
��� ������� �������� (1)
where� � and � � arethetarget andthecurrent output valuesfor pattern , respectively,
asa functionof thenetwork weights�
.Thearchitecture of themulti-layerperceptron is organizedasfollows: thesignals
flow sequentiallythroughthedifferent layersfrom theinput to theoutputlayer. Foreachlayer, eachunit (“neuron”) first calculatesa scalarproduct betweena vector of weightsandthe vectorgiven by the outputs of the previous layer. A transfer function is thenappliedto theresultto producetheinput for thenext layer. Thetransfer function for thehiddenlayersis thesigmoidalfunction: ! �#"$�% �'& � �)(+*-,$. � , while for theoutput layerit is theidentity function,sothattheoutput signalis notbounded.
It hasbeendemonstratedthata network with a singlehidden layer is sufficient toapproximateany continuousfunctionto adesiredaccuracy, providedthatthenumberofhiddenneuronsis sufficiently large[11]. In thiswork weconsiderasingle-hidden-layerMLP anda training technique that usessecond-derivativesinformation: the one-step-secantmethod with fast line searchesOSSintroducedin [3,4]. The one-step-secantmethodOSSis a variationof what is calledone-step(memory-less)Broyden-Fletcher-

Goldfarb-Shanno method, see[17]. TheOSSmethodis describedin detailandis usedfor multi-layerperceptronsin [3] and[4].
3 Systemand experimental setup
Our systemconsistsof a wirelessLocal Area Network basedon the IEEE 802.11bstandard. It is locatedonthefirst floorof a3-storeyedbuilding.Thefloorhasdimensionsof 25.5 / x 24.5 / , for a totalareaof 624.75 / � andincludesmorethanelevenrooms(officesandclassrooms).
The threeaccesspointsareAVAYA WP-II E modelby Lucent Technologies,twowith external antennas.ThewirelessstationsarePentium-basedlaptopcomputersrun-ning Linux version 7.2.Eachlaptopis equippedwith theORiNOCOPCcard- a wire-lessnetwork interfacecardby LucentTechnologies.
Thenetwork operatesin the2.4GHz license-freeISM bandandsupports dataratesof 1, 2, 5.5, and11Mbps.The 2.4 GHz ISM bandis divided into 13 channels(IEEE& ETSI WirelessLAN Standard) andonly threechannelsareused:channel 1, 7, 13 at2412, 2442 and2472MHz respectively, in orderto minimizetheinterference.
Fig.2. Thefloor layoutof theexperiment,with accesspointslocations.
To facilitate the collection of labelledexample patterns,the map of the areaisstoredon a laptopanda userinterfacehasbeendesignedbasedon a singleclick onthedisplayedmap.Theorigin of thecoordinatesystem(0,0) is placedat the left bot-tom corner of themap.The
�#")0213�coordinatesof theaccesspointsareasfollows: AP14�6537 898 / 0 �;: 7 <98 / � , AP2
4� � 5 / 0=537?> / � , AP3@� � >37 < / 0=A37 8 / � .

Whenthe useris at an identifiable position in the experimentalarea(e.g.,at theentranceof aroom,closeto acorner, closeto acolumn, etc.)heclicksonthedisplayedmapin a point corresponding to the current position. Immediately after the click, thethreereceivedradiosignalstrengthsfrom theAPsareautomaticallymeasuredandtheyaresaved togetherwith the point’s coordinatesin a file, to prepare the examples fortrainingandtestingtheneural network.
A totalof 194measurement pointsarecollectedduring different periodsof theday.
4 Selectionof the multi-lay er perceptr on architectur e
A labelledtraining set(given by inputs signalsandcorresponding output locations) isusedby the OSSlearningalgorithmto determine the free parametersof the flexibleMLP architecture. Themeasureof theerroron the training setgivenby eq.1 is mini-mizedby OSSduringthelearningprocedure.
It is essentialto notethattheobjectiveof thetrainingalgorithm is to build a modelwith goodgeneralization capabilities whenconfrontedwith new input values,valuesnot presentin the trainingset.Thegeneralizationis relatedboth to thenumber of pa-rametersandto thelengthof thetrainingphase.In general, anexcessivenumberof freeparametersandan excessively long trainingphase(over-training) reduce the trainingerrorof eq.1 to smallvaluesbut prejudice thegeneralization:thesystemmemorizesthetrainingpatternsanddoesnotextracttheregularitiesin thetaskthatmakegeneralizationpossible.
Thetheoreticalbasisfor appropriategeneralizationis describedby thetheory of theVapnik - Chervonenkis(VC) dimension[18]. Unfortunately, theVC dimension is noteasilycalculatedfor a specificproblem andexperimentationis often the only way toderiveanappropriatearchitecture andlengthof thetraining phasefor a given task.
Thepurposeof theexperimentsin thissectionis todeterminethearchitecture,in ourcasethenumberof hiddenunits,andthelengthof thetrainingphaseleading to thebestgeneralizationresults.Fig. 3 describesa significantsummary of theresultsobtainedintheexperiments.
Thethreearchitecturesconsideredaregivenby 4, 8, and16 hiddenunits.A setoflabelledexamples(signalstrengthsandcorrectlocation)hasbeencollectedasdescribedin Sec.3.Amongall examples,140areextractedrandomly andareusedfor thetrainingphase,the remaining ones(54) are usedto test the generalization,at different stepsduring thetrainingprocess.Theplottedvalueis theaverageabsolutedistanceerror B �over all patterns:
B �4C�D�������
E ���F" � ��� " � �#��2� � ( ���F1 � ��� 1 � �#��2� � (2)
where � " � �#�� and � 1 � ���� arethe"
and1
coordinatesobtainedby the network and�F" � and�F1 � the correct”target” values.
Dis the number of testor training patterns,
dependingonthespecificplot.Both thetrainingerrorandthegeneralization error areshown in eachfigure. As ex-
pected,the training errordecreasesduring training, while thegeneralization error first

1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
0 5000 10000 15000 20000 25000 30000 35000 40000 45000 50000
Ave
rag
e ab
solu
te e
rro
r (m
eter
s)
G
Number of iterations
test errortraining error
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
0 5000 10000 15000 20000 25000 30000 35000 40000 45000 50000
Ave
rag
e ab
solu
te e
rro
r (m
eter
s)
G
Number of iterations
test errortraining error
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
0 5000 10000 15000 20000 25000 30000 35000 40000 45000 50000
Ave
rag
e ab
solu
te e
rro
r (m
eter
s)
G
Number of iterations
test errortraining error
Fig.3. Training andtesterror for architectureH�IKJLINM (top), H�IKOPIQM (middle), H�IRTS IUM (bottom).
decreases,thenreachesaminimum valueandfinally tendsto increase(over-training ef-fect).Theover-training effect is particularly strongfor thearchitecture with 16 hiddenunits.Thebestgeneralization values(of about1.80meters)arereachedafterapproxi-mately3,000 iterationsfor boththe8 and16hidden unitsarchitectures.
Therobustnessof theMLP model for differentarchitecturesandfor different lengthsof the trainingphaseis to benoted.Whenthe architecture changesfrom 4 to 8 to 16hiddenunits,theoptimalgeneralizationvaluechangesonlyby lessthan14%(from 1.99metersto about1.75meters).Whenthe number of iterationsincreasesfrom 2,000 to50,000 thegeneralization error remainsapproximatelystablefor themorecompactar-chitecture(4 hiddenunits),andincreasesslowly for thearchitectureswith morehiddenunits,asexpectedbecauseof thelargerflexibility of thearchitecture.
After this seriesof tests,the architecture 3 V 16 V 2 achievesthebestresult(intheexamplesof Fig. 3 we obtaina resulton thetestsetof 1.75meters).Thestructureof theneural network usedin thesubsequent testsconsistsof threelayers:3 inputunits,16 hiddenlayerunitsand2 outputs.TheCPUtime for a singletraining session(3,000iterationswith 194 examples)on the architecture 3 V 16 V 2 is of 21 seconds on a1400MHz PentiumIV.
To studytheeffectof thenumberof training exampleson thegeneralizationerroraseriesof testshasbeenexecuted.For eachtest,a specifiednumber of examplesareex-tractedrandomly from theentiresetandusedfor training,while theremaining onesareusedto testgeneralizationaftertrainingis completed.For agivennumberof examples,100testshavebeenexecuted.
1
2
3
4
5
6
7
8
0 50 100 150 200
Ave
rag
e te
st e
rro
r (m
eter
s)
W
Number of examples
"average"
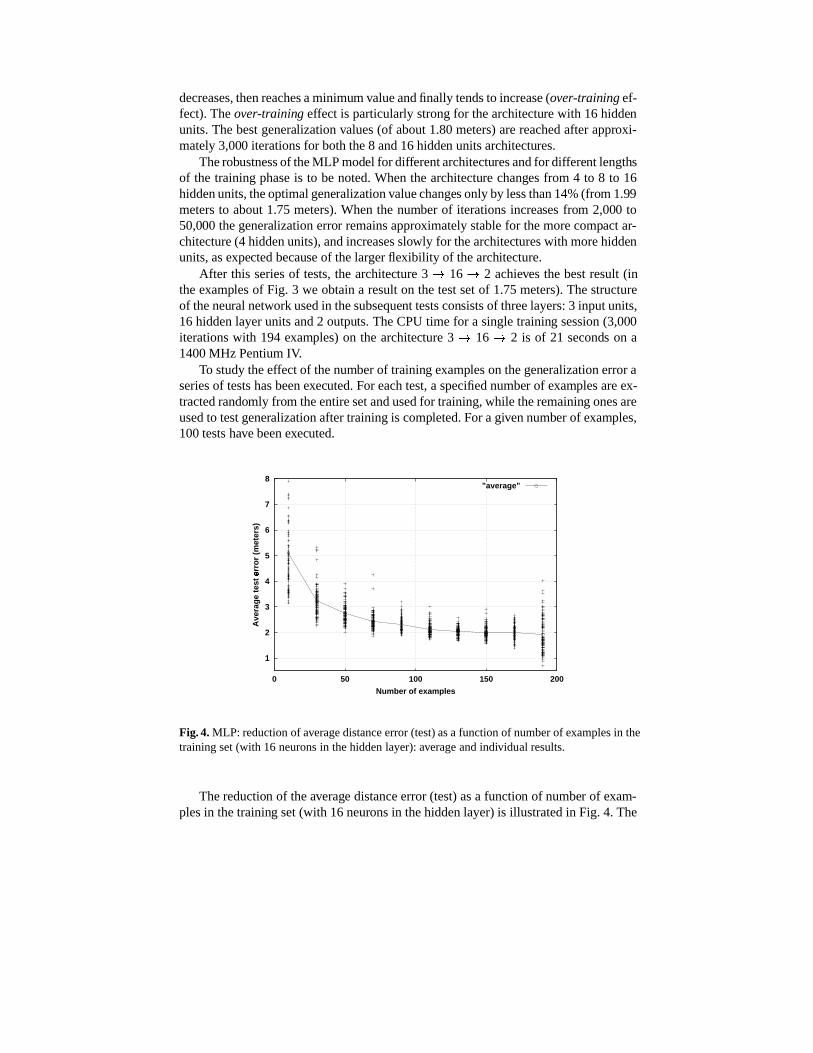
Fig.4. MLP: reductionof averagedistanceerror(test)asa functionof numberof examplesin thetrainingset(with 16 neuronsin thehiddenlayer):averageandindividual results.
Thereduction of theaverage distanceerror(test)asa function of number of exam-plesin thetraining set(with 16neuronsin thehiddenlayer)is illustratedin Fig. 4. The

averageerror decreasesrapidlyasafunctionof thenumberof examples,to reachafinalaverage valueof 1.91.The standarddeviation of the individual resultsis largerwheneitherthenumberof trainingexamplesor thenumberof testexamplesis verysmall.
In order to usethelargestnumberof examplesfor training,theleave-one-out tech-niquehasbeenadoptedfor afinal test.In thiscase,all examplesapartfromoneareusedfor training, while thegeneralizationis testedon thesingleleft-out example. Theex-periment is repeatedby considering eachpatternin turnastheleft-out example. Whenusinganarchitecturewith 16neuronsin thehidden layertheaverageresultof theleave-one-out testis of 1.82 meters.
5 Comparisonwith K-Nearest-Neighbors
The X -nearest-neighborsrule is a well known non-parametric technique. For the caseof classification,the nearest-neighbor rule classifiesa patternwith the samelabel astheoneof theclosestlabelledsample:theprocedureis suboptimal but, with unlimitednumber of samplestheerror rateis never worsethantwice theminimum (Bayes)errorrate[8]. In thecontext of regressionto obtainthelocation,the X -nearest-neighborsrule(a generalization thatconsidersX insteadof thesinglenearestneighbor)hasbeenusedin [2].
Becauseit is difficult to comparetheresultsobtained in differentexperimentalen-vironments,thek-nearest-neighbors rule in thesignalspacehasbeenusedto classifythesameexamplesusedfor theprevioustests.Thismethodcomputesthedistancesbe-tweenthevectorof thereceived signalsatacertainpointandthevectors of signalsof asetof pointswith known locations.Thevectorshaving the X smallestdistancesarecon-sideredandtheestimatedpositionis computedasanaverageof thepositionsassociatedwith thesmallest-distancevectors.
Thesamedatasetusedfor MLP is divided into two disjointedsetsof examples:onefor training andonefor testing.
In thetraining setweconsiderboththesignalstrengths andtheposition:
�#YZD �� 0�YD �� 0=YZD �[ 02" � 021 � �If the training setconsistsof \ examples,in orderto compute thepositioncorre-
sponding to a triplet of signalstrengths�#YD � 0�YD � 0�YD [ � takenfrom thetestset,one
proceedsasfollow:
– For each ]_^ � 7`7�7 \ , compute the distance� �
between�6YZD �� 0=YZD �� 0=YZD �[ � and�#YD � 0�YD � 0�YD [ �
– Find the X smallestdistances(with X fixed):� �ba�7`7�7 � �dc
– Computetheestimatedpositionastheaverageof thepositions recordedfor the Xexamplesselectedat thepreviousstep:
"egf ch6i a .;j hk ,1Plf chmi aon j hk
ThestandardEuclideandistance�-�j is used:
�p��jq�#YD �� � YZD � � � ( �6YZD �� � YD � � � ( �#YD �[ � YZD [ � �

Insteadof thesimpleaverage, a weightedaverage canbeadopted. In this casethepositionsareweightedaccording to the inverseof the distance(unlessthedistanceiszero,in whichcasetheweightis 1,000). Theestimatedpositionis now computedas:
"rlskt �u� " � h �v j hskt ��� �v j h
0w1Plskt �u� 1 � h �v j hskt �u� �v j h
To analyze theeffect of thenumberof neighbors X on theerror, the leave-one-outtechnique is usedon thewholedataset.Fig. 5 shows theaverage error resultsfor theweightedandstandardmethods.In bothcases,thebestresultis obtainedfor X x8 . Theaverage distanceerror is 1.81 meterswhenusingthenormalaverageand1.78 metersfor theweightedaveragecase.Theweightedmethodachievesbetterresultsandis morestablewhentheparameter X increases:theeffect of far away neighborson theaveragebecomeslessdangerous,asexpected.
1.6
1.8
2
2.2
2.4
0 2 4 6 8 10 12 14 16
Ave
rag
e te
st e
rro
r (m
eter
s)
W
Number of neighbors
standard averageweighted average
Fig.5. K-NN: reductionof averagedistanceerror (test)asa function of number of neighbors:standardandweightedaverage.
A seriesof testshasbeenexecuted to study the averagedistanceerror whenthenumber of theexamplesusedfor thetrainingsetis changed,in thesamemanner asinSec.4. As it is shown in Fig. 6 theerrordecreasesfrom 4.5metersby using10trainingexamples, to lessthan1.90 metersby usingmore than170 examples. With only 50examplestheaveragedistanceerroris alreadyof 2.38meters.
6 Effect of SignalVariability on Location Err ors
The signal strength variability at a fixed positioncausesa locationerror that cannotbeeliminatedif a singlemeasureis executed.This error canbeconsideredasa lower

1
2
3
4
5
6
7
8
0 50 100 150 200
Ave
rag
e te
st e
rro
r (m
eter
s)
W
Number of examples
"average"
Fig.6. K-NN: reductionof averagedistanceerror (test)asa functionof number of examplesinthetrainingset(using6 neighbors).
bound, unlessmorethanonesignalmeasureis executed(for example by averaging orby considering a moving average).
In orderto verify thevariability during thedayof thesignalstrength andthecor-responding variability of thepositionestimation,a mobile terminalwasleft at a fixedpositionto acquirethesignalsreceivedfromtheaccesspointsduring theday. At theenda total of 11,625valuesof thesignalsfor thesamepositionwerecollected,although,becauseof quantization, only 465different tripletsof signalsexist in thedataset.Thevalueswereacquiredduringa working daywhenmany people moved in the test-bedarea.
After using the sametraining setas in Sec.4–Sec.5, the positionof the mobileterminal is evaluatedthrough both MLP and X -nearest-neighbors. Fig. 7–8 show theobtained positions andtheir distribution, by counting how many positionsfall in eachbin. Fig. 7 shows the resultobtained with MLP. The error in the positionestimationcausedby signalfluctuationis ratherlimited,with 0.359 metersstandarddeviation.TheFig. 8 describes theresultfor X -nearest-neighborscase.Thestandarddeviation for thedistanceis now 0.392meters,a little higher thanthestandarddeviation for MLP.
Bothresultsindicateasignificantgapbetweentheerror obtainedwith thepresentedtechniquesandthe estimateof the locationvariability causedonly by signalfluctua-tions.Additionalworkshouldthereforeconsiderdifferentandmorepowerful modellingtechniquesaimingat a possibleadditional reduction in thedistanceerror.
7 Conclusion
A new model basedon MLP neuralnetworks to determinethe positionof a mobileterminalin a wirelessLAN context hasbeenpresented. Thetechniquehasbeenevalu-atedin a real-world test-bedconsistingof accesspointsandmobileterminalsusingthe

DistributionData
2 3
4 5
6 7
8 9
Meters 2
2.5 3
3.5 4
4.5 5
5.5 6
6.5 7
Meters
0
1000
2000
3000
4000
5000
Count
Fig.7. Scatteringof positioningusingMLP with 16 neuronsin thehiddenlayer.
DistributionData
2 3
4 5
6 7
8 9
Meters 2
2.5 3
3.5 4
4.5 5
5.5 6
6.5 7
7.5
Meters
0
1000
2000
3000
4000
5000
Count
Fig.8. Scatteringof positioningusing6 nearestneighbors.

IEEE802.11bstandard.In addition, acomparisonwith analternativemethodbasedonX -nearest-neighbors hasbeenexecuted in the sameexperimentalcontext. The resultsobtained with theMLP neural network (1.82meters)arecomparableto thebestresultsobtained with the X -nearest-neighborswhentheparameter X is optimizedfor thecurrentcontext (1.81 metersfor thestandard average,1.78metersfor theweightedaverage).
The fact that a basicmethod like the X -nearest-neighbors achievessimilar resultsis an indication that the complex dependenciesbetweensignalsandpositions arenoteasilymodelledby anMLP neural network.
Thepresentedmethodsarenotassociatedto thespecificconsideredtechnology. Weplanto continuethis work by considering differenttechnologiesandcontexts (e.g., theBluetoothprotocol) anddifferentnon-parametricmodelling techniquesthatmaylowerthepositionerrors to valuescloserto theerrors causedby thesignalfluctuations.
Acknowledgments
We acknowledgethefinancialsupport of theWirelessInternetandLocation Manage-mentArchitecture(WILMA) project,Universityof TrentoandICT-irst, andthehelpofMauroBrunato.
References
1. J. Anhalt, A. Smailagic,D. P. Siewiorek, F. Gemperle,D. Salber, S. Weber, J. Beck, andJ. Jennings. Toward context-awarecomputing: Experiencesand lessons. IEE IntelligentSystem, 3(16):38–46, May-June2001.
2. ParamvirBahl andVenkataN. Padmanabhan.RADAR: An in-building RF-baseduserloca-tion andtrackingsystem.In IEEEINFOCOM2000, pages775–784,March2000.
3. R. Battiti. Acceleratedback-propagation learning:Two optimizationmethods. ComplexSystems, 3(4):331–342,1989.
4. R. Battiti. First-andsecond-ordermethodsfor learning:Betweensteepestdescentandnew-ton’s method.Neural Computation, 4:141–166,1992.
5. R. Battiti, T. Le Nhat,andA. Vill ani. Location–aware computing:a neuralnetwork modelfor determininglocationin wirelessLANs. TechnicalReport5, Dipartimentodi Informaticae Telecomunicazioni, Unversita’di Trento,Feb2002.
6. P. Castro,P. Chiu, T. Kremenek,andR. Muntz. A probabilisticroom locationserviceforwirelessnetworked environments. In Ubicomp2001:UbiquitousComputing, pages18–34.Springer, 2001.
7. G.M. Djuknic and R.E. Richton. GeolocationandassistedGPS. IEEE Computer, pages123–125,February2001.
8. R.O.DudaandP. E. Hart. PatternClassificationandScheneAnalysis. JohnWiley andSons,1973.
9. Andy Harter, Andy Hopper, PeteSteggles,Andy Ward,andPaulWebster. Theanatomyof acontext-awareapplication.In MOBICOM1999, pages59–68,August1999.
10. Jeffrey Hightower, GaetanoBorriello, and Roy Want. SpotON:An Indoor 3D LocationSensingTechnology Basedon RFSignalStrength. TheUniversityof Washington,TechnicalReport:UW-CSE2000-02-02,February2000.
11. Kurt Hornik. Approximationcapabilitiesof multilayer feedforward networks. Neural Net-works, 4:251–257,1991.

12. U. KubachandK. Rothermel.Exploiting locationinformationfor infostation-based hoard-ing. In SeventhAnnual International Conference on Mobile Compuitingand Networking,Rome, pages15–27, 2001.
13. M. A. Marsan,C-F. Chiasserini,A. Nucci, G. Carello,andL. D. Giovanni. Optimizing thetopology of bluetoothwirelesspersonalareanetworks. In Proceedingsof IEEE Infocom2002,in press, 2002.
14. A. Misra,S.Das,A. McAuley, andS.K. Das. Autoconfiguration,registrationandmobilitymanagement for pervasive computing. IEEE PersonalCommunications(SpecialIssueonPervasiveComputing), 8(4):24–31, Aug 2001.
15. S.Pradhan,C.Brignone,J.-H.Cui,A. McReynolds,andM.T. Smith.Websigns:hyperlinkingphysicallocationsto theweb. IEEEComputer, 34(8):42–48,August2001.
16. NissankaB. Priyantha,Anit Chakraborty, and Hari Balakrishnan. The cricket location-supportsystem.In MOBICOM2000, pages32–43, August2000.
17. D. F. Shanno.Conjugategradientmethodswith inexactsearches.Mathematicsof OperationsResearch, 3(3):244–256,1978.
18. V.N. Vapnik andA. Ja.Chervonenkis. On theuniform convergenceof relative frequenciesof eventsto their probabilities.TheoryProbab. Apl., 16:264–280,1971.
19. Roy Want,Andy Hopper, VeronicaFalcao,andJonathanGibbons. Theactivebadgelocationsystem.ACM Transactionon InformationSystems, 10(1):91–102,January1992.
20. Andy Ward,Alan Jones,andAndy Hopper. A new locationtechniquefor theactive office.IEEEPersonal Communications, 4(5):42–47, October1997.
21. JayWerb andColin Lanzl. Designinga positioningsystemfor finding thingsandpeopleindoors.IEEESpectrum, 35(9):71–78, September1998.