multi robot team formation for distributed area...
TRANSCRIPT

Multi‐robot Team Formation for Distributed Area Coverage
Raj Dasgupta
Computer Science Department
University of Nebraska, Omaha

C‐MANTIC Lab
• Collaborative Multi‐AgeNt/Multi‐robot Technologies for Intelligent Coordination Lab
• Main research areas:– Autonomous, adaptive, multi‐agent/multi‐robot systems
– Biology‐inspired emergent computing and swarming
– Game theory and computational economics

Projects
• COMSTAR – Multi‐UAV system for ATR (Automatic Target Recognition) – with an
STTR partner– Sponsor: U.S. DoD NavAir – Period: 2004‐2008
• MASSES– Multi‐robot system for lunar and Martian surface exploration and
mapping– Sponsor: NASA Nebraska EPSCoR– Period: 2006‐2007, 2008‐2009
• COMRADES– Multi‐robot system for automated landmine detection (Focus: multi‐
robot coordination)– Sponsor: Office of Naval Research– Period: August 2009‐2012

COMSTAR Project• Objective: Locate and track mobile and stationary targets
within a given area of interest (AOI) using mobile mini‐robots, (possibly aerially)
• Target locations not known a priori• Use image identification algorithms on‐board the robots for
automatic target recognition(ATR)• Each mini‐robot has camera, GPS, distance sensor, wireless
radio comm., micro‐processor• Constraints: 1) Robots should not be remote controlled from
ground control station by humans, 2) AOI is significantly largerthan robot comm‐range 3) Limited memory, comms, computation capability on‐board single robot

Our Proposed Solution
• Multi‐robot coordination for cooperative target identification
• Using mini‐robots
• Java Demo

Different Phases in Coordination Process
• Deployment
• Search and Discovery
• Multi‐robot Task Allocation
• Mobile Target Tracking
• Task Execution

Different Phases in Coordination Process
• Deployment
• Search and Discovery: Multi‐robot Coverage
• Multi‐robot Task Allocation
• Mobile Target Tracking
• Task Execution

Robot Simulator
• Webots
• Accurate models for environments, robots– Physics engine
• Simulations in real or accelerated time
• Compatible with robot hardware like e‐puck, Khepera, etc.

The Challenges
• Mini‐robots are small– Good:
• They are not very expensive. Cost of fielding a team of ~50 mini‐robots is the same as the cost of one large robot
• Robust: System can continue to work even when a few robots are lost
– Bad: Very limited capabilities (little memory, slower processor, noisy sensors)
• Lesson: – Keep things(computation) simple for each robot– Come up with clever ways to make the team perform complex tasks
$700
$35,000 ‐ $70,000

Mini‐Robot: E‐puck
• Memory: 128KB RAM, 8 KB flash• CPU capable of 14 MIPS• Sensors: Forward‐looking IR distance sensors• Emitter/receiver pair (bluetooth enabled) for communication over limited range
• Camera: Color VGA, 640 X 480 resolution• GPS*: gives location in 2‐d coordinates and heading in radians

Multi‐robot Coverage: Model
• R: set of robots
• Each robot has a coverage tool attached to it
• art: action (movement) by robot r during time step t
• f: art X lrt → crt, unit coverage function –transforms action art performed at location lrt
to a region crt
• Environment size: D2‐O

Definition: Multi‐robot Distributed Area Coverage Problem
• Difficult to solve with limited capability mini‐robots
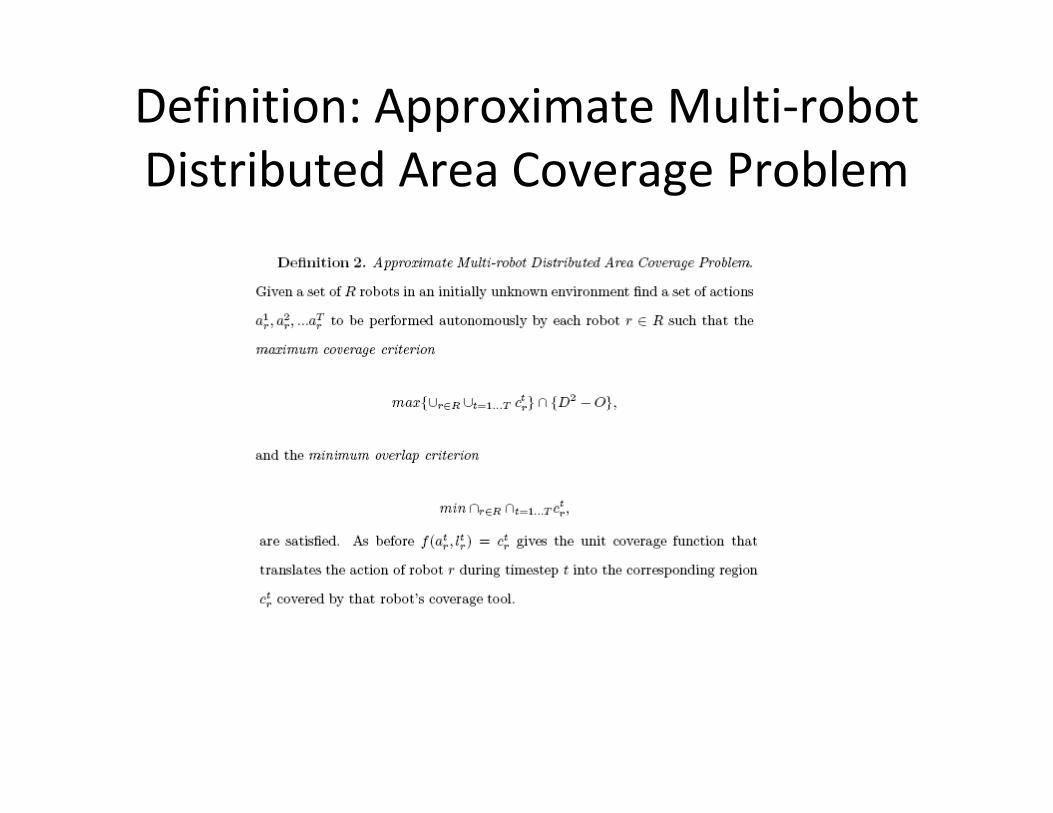
Definition: Approximate Multi‐robot Distributed Area Coverage Problem

Our First Solution• Robots move and plan individually
• But each robot coordinates its action with other robots to achieve the maximum coverage and minimum overlap criteria

Existing Approaches
• Vector Force Field Approach (Parker, Sukhatme) – Pair of robots exert repulsive forces on each other when they come within a certain distance of each other
– Can be used to address maximum coverage criterion, locally
• Coverage with ant‐robots (Wagner, Koenig)– Ant robots “deposit” pheromone (node count) at each location or cell on a grid environment
– Higher node count (pheromone)means that the cell was visited many times
– Can be used to address minimum overlap criterion, locally

Some Issues
• Ant‐robot node counting techniques used a central location to store the state space (pheromone information)
• But we want to make our system fully distributed: Partial (node count) pheromone maps are stored locally
• Tradeoff:– Robots have to move closer to each other so that exchange their coverage information with each other to achieve the minimum overlap criterion…
– But then they would not be able to disperse away from each other to achieve the maximum coverage criterion
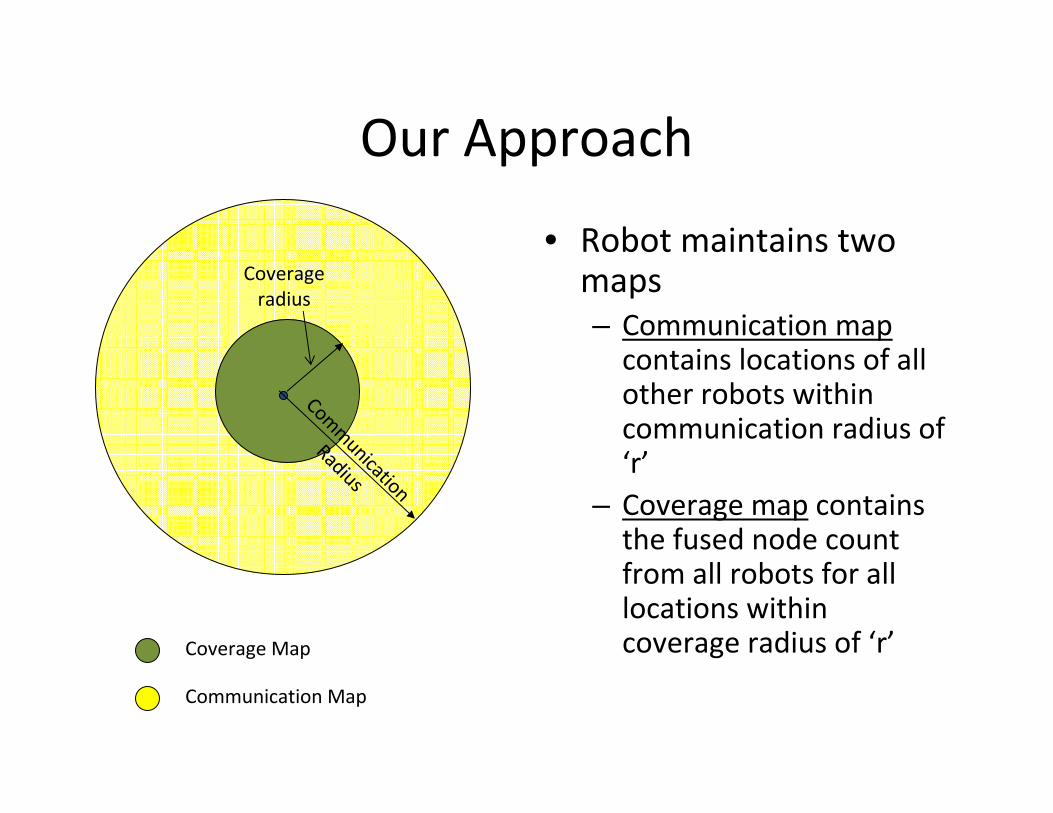
Our Approach
• Robot maintains two maps– Communication mapcontains locations of all other robots within communication radius of ‘r’
– Coverage map contains the fused node count from all robots for all locations within coverage radius of ‘r’
Coverage radius
Communication
Radius
Coverage Map
Communication Map

Coverage Map
• Node counting– Binary: each location
stored as a bit, fused with OR
– Incremental: each location stored as an integer, fused with ADD
– Transient: each location stored as a pheromone value with timestamps (real, int), fused with ADD + DECAY
• Consider gradient of pheromone (trails)
• Extends over all locations within coverage radius from current location of robot
• The region stored in the map of a robot changes as the robot moves (have to discard old, possibly useful information)
• Merge maps from multiple robots that are within coverage radius
• Record information as a ‘node count’

Scenario 1 of 3• Robot r has no other robots within its communication range
• Action:– Do a random walk
r

Scenario 2 of 3• Robot r has some robots within its
communication range, but no other robots within its coverage radius
• Action (Disperse) – vector force field approach– For each action available to r except
its last action• Calculate the sum of the Manhattan distances from all other robots in comm. map
• Select the action that maximizes this sum of Manhattan distances
r

Scenario 3 of 3• Robot r has some robots within its
communication range and some robots within its coverage radius
• Action – For each action available to r except
its last action• Calculate the
– # robots within coverage map with which
» Distance decreases» Distance increases
– Information gain (# robots that get into coverage radius by this action)
• Select the action that maximizes the weighted sum of the above three parameters
r
•Video demo with 6 e‐puck robots

Coverage: Various Strategies

Redundancy: Varying Number of Robots

Redundancy: Varying Coverage Map Radius

Coverage with Localization Error
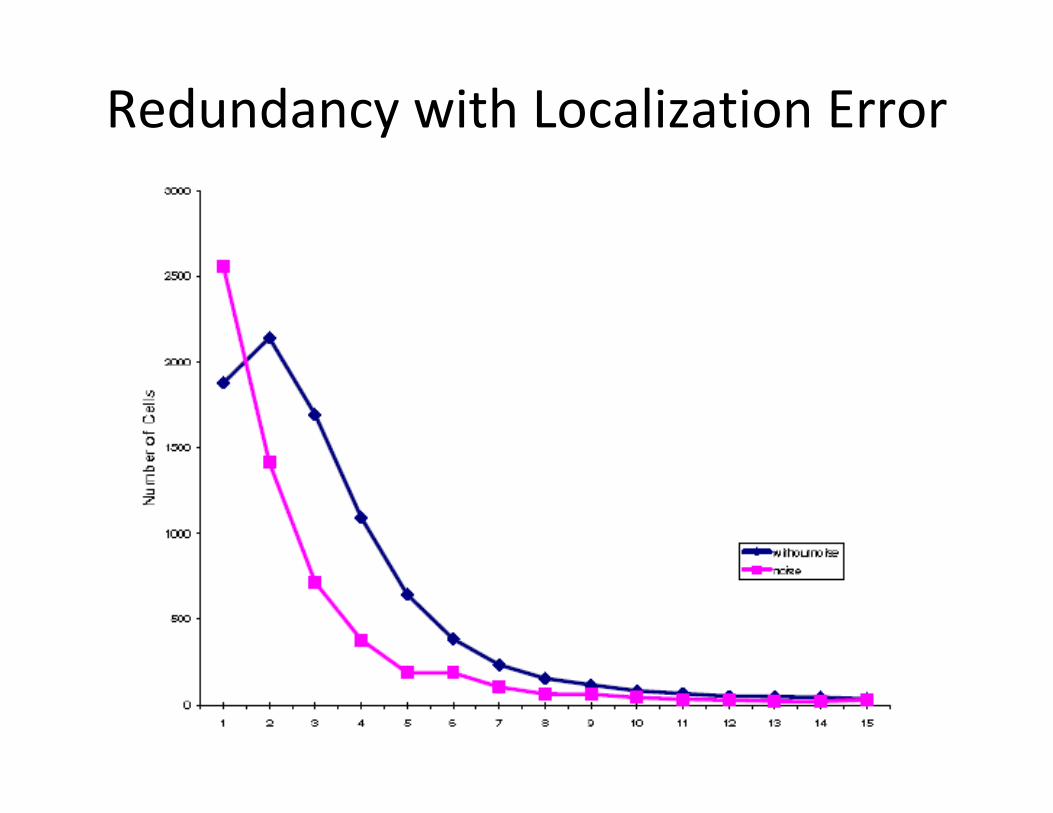
Redundancy with Localization Error

Coverage: Various RobotFailure Probabilities

Comparing with Fiducial robot dispersion (right)
• L. Ludwig and M. Gini, “Robotic Swarm Dispersion Using Wireless Intensity Signals,” Proc. 8th Intl. Symposium on Distributed Autonomous Robotic Systems(DARS’06), Minneapolis, MN, 2006.

Publications on this topic
• K, Cheng and P. Dasgupta, "Dynamic Area Coverage using Faulty Multi‐agent Swarms," Proc. IEEE/WIC/ACM International Conference on Intelligent Agent Technology (IAT 2007), Fremont, CA, 2007, pp. 17‐24.
• P. Dasgupta and K. Cheng, “Distributed Coverage of Unknown Environments using Multi‐robot Swarms with Memory and Communication Constraints,” UNO Technical Report no. cst‐2009‐1, 2009.

Problem: Moving Across Small Spaces

Robot Team Formation for Area Coverage
• Reynolds’ flocking model– separation, cohesion, alignment
• Provides a model for controlling groups of robots
• What we also want to do– Dynamic team formation
• adapt shape and size of team with environment (e.g., obstacles, narrow passages)
– Robots should be able to change teams depending on operational constraints

Agent Theory
• Models how humans behave– Rational behavior
• I will do something only if I gain something from doing it• My gain is called my utility• Multi‐agent systems – mainly deals with interaction and
coordination issues between agents, formal framework given by game theory
• Can be used to answer interesting questions for multi‐robot team formation: – When should one robot leave a team?– Should it move alone or join another team? Which team should
it pick?

Two Layered Approach
• What do we gain from this?– More human‐like (rational) behavior from robots
– Multiple behavior levels, helps abstraction
– More autonomy
Utility Model
Controller
Utility Model
Controller
Utility Model
Controller
Robot 1 Robot 2

Utility Model for Multi‐Robot, Team‐based Distributed Area Coverage
• Robot redundancy (dr)– how much redundant coverage is a robot doing in its team?
• 0 – not redundant
• 1 ‐ redundant
• Team redundancy (Dt) – how much redundant coverage is a team doing?
• Ratio between number of robots doing redundant coverage and total number of robots in the team
• Team utility: Ut = 1‐Dt

Utility Model (contd.)
• ur,t = 2: best possible value, happens when no robot in a team is doing redundant coverage, and team size is < Tmax
• 1 < ur,t < 2: Admissible utility, happens when some robots (but not robot r) are doing redundant coverage in the team containing r
• 0 < ur,t < 1: Inadmissible utility, happens when robot r is doing redundant coverage in its team
• Robot utility

Robot Controller for Coverage with Team Formation
Move in formation
Join another team
Move in changed direction to avoid
obstacle
Try new formation in same team
Move alone
Maximum utility information
Obstacle
Succ
ess
Not m
axim
um u
tility
in fo
rmat
ion
Failure
Succ
ess
Failu
re
Obstacle avoidedA
noth
er te
am
with
inco
mm
. ran
ge
•Demos 1,2 of flocking with utility‐based model

Robot Controller for Coverage with Team Formation
Move in formation
Join another team
Move in changed direction to avoid
obstacle
Try new formation in same team
Move alone
Maximum utility information
Obstacle
Succ
ess
Not m
axim
um u
tility
in fo
rmat
ion
Failure
Succ
ess
Failu
re
Obstacle avoidedA
noth
er te
am
with
inco
mm
. ran
ge
•Demos 1,2 of flocking with utility‐based model
Controller for leader referenced
flockingBraitenberg controller

Publications on this topic
• K. Cheng and P. Dasgupta, "Coalition game based distributed coverage of unknown environments using robot swarms," International Conference on Autonomous Agents and Multi‐Agent Systems (AAMAS'08), Estoril, Portugal, 2008, pp. 1191‐1194.
• P. Dasgupta, K. Cheng, and L. Fan, “Flocking‐based Distributed Terrain Coverage with Mobile Mini‐robots,” Proc. Swarm Intelligence Symposium, Nashville, TN, 2009, pp. 96‐103.

Towards a richer framework: coalition formation in robot teams
• Can we use coalition formation (branch of game theory that dealswith how human beings form teams) to answer more questions– More structured team formation techniques– Stability of team formation
• Utility (theory) lies at the core of it – I will form a team with A if I can gain more by that than forming a team with B, unless B givesme some more incentive– Concepts like Shapley value, least core, etc. are computationally very
expensive to compute (approximations exist)– Not distributed
• Recent (2005‐2009) richer computational representations of coalition formation (MC‐Net, MACG, etc.) are centralized, coalition formation under uncertainty (2007)
• A new representation for coalition games in distributed form?

Other Research Areas
• Distributed Multi‐robot Coverage– Ke Cheng (Ph.D.), Yi Wang (MS)
• Multi‐Robot Task Allocation– Taylor Whipple (BS), Randal Olson (MS)
• Mobile object tracking/Pursuit Evasion Games– Li Fan (MS)
• Game Theoretic Information Aggregation– Janyl Jumadinova (Ph.D.)

QUESTIONS
Thank You