multi æstep prediction of pathological tremor with ... · layer 2, eac h ratio of fir i ring...
TRANSCRIPT
Multi step Prediction of Pathological TremorWith Adaptive Neuro Fuzzy Inference System
(ANFIS)
Sivanagaraja Tatinati and Kalyana C. Veluvolu
School of Electronics Engineering, College of IT Engineering, Kyungpook NationalUniversity, Daegu, South Korea
Abstract In this paper, to overcome the inevitable phase delay due to pre filtering techniques andelectromechanical delay in the procedure of pathological tremor compensation, a machine learningtechnique based on fuzzy logic and neural networks (adaptive neuro fuzzy inference system (ANFIS)) isemployed. Experimental evaluation on tremor data is performed with data acquired from eight patients.Results show that ANFIS provides good performance in comparison with existing methods.
I. Introduction
Pathological tremor is defined as an involuntary and approximately rhythmic oscillations of a body part [1].Pathological is one of the serious disabling forms of tremors and often accompanies with aging. Althoughpathological tremor is not a life threatening disorder, but it hampers the ability of individual to performdaily living activities like drinking water with a glass, unlock the door with a key etc. Further, the inabilitydue to tremor leads to social embarrassment [1]. To compensate the functional disability (tremor) therebyto improve the quality of life, several pharmaceutical and surgical therapies are developed. The methodshave their limitations and side effects. So, an effective treatment that can compensate tremor accurately yetto be developed.
Over the last decade, considerable research has been focussed on developing active pathological tremorcompensation techniques in real time [3], [4], [6], [7]. One such approach is compensating pathologicaltremor by stimulating the relevant muscle groups with appropriate electric pulses thru functional electricalstimulator (FES) [3]. For example, consider hand supination pronation muscle group, if tremor is due to thesupination muscle group necessary electric pulses will be provided to pronation muscle group to counteractthe involuntary movement, and viceversa. To compensate the tremor, a wearable device named as WOTAS(wearable orthosis for tremor assessment and suppression) was developed by using a feedback controlledFES.
The efficacy of the wearable devices depends on the accurate and zero phase delay filtering of tremulousmotion from the whole motion. In the tremor compensation procedure with FES, a delay of approximately80 ms was identified. The major source for the delay is electromechanical delay (EMD), defined as the delaybetween the onset of activation of muscle and the detection of movement [2]. As a result of several studies,the EMD was identified in the range of 50 60 ms [2]. The other source for delay is the pre filtering stagewhich is used to separate the voluntary motion and tremulous motion from the whole sensed motion [7].On a whole, a latency of 80 ms was inevitable in the procedure and this delay adversely affects the tremorcompensation accuracy.
To overcome the phase delay limitation, multi step prediction with harmonic method and Autoregressivemethod was proposed in [4]. The developed methods yield accurate prediction with periodic signals. Owingto the quasi periodic nature of the tremor signals, prediction accuracy with the above methods is ratherlimited. To further enhance the prediction capabilities, in this work, we employed a machine learningtechnique, adaptive neuro fuzzy inference system (ANFIS). ANFIS has been recently popular as an effectivemethod for time series prediction, function estimation, system identification and classification problems.
Proceedings of The National Conference on Man Machine Interaction 2014 [NCMMI 2014] 22
NCMMI '14 ISBN : 978-81-925233-4-8 www.edlib.asdf.res.in
Downloaded fro
m w
ww.e
dlib
.asd
f.re
s.in
The goalthe targefuzzy ruemploystremor dresults ob
In this sdescriptiANFIS ar
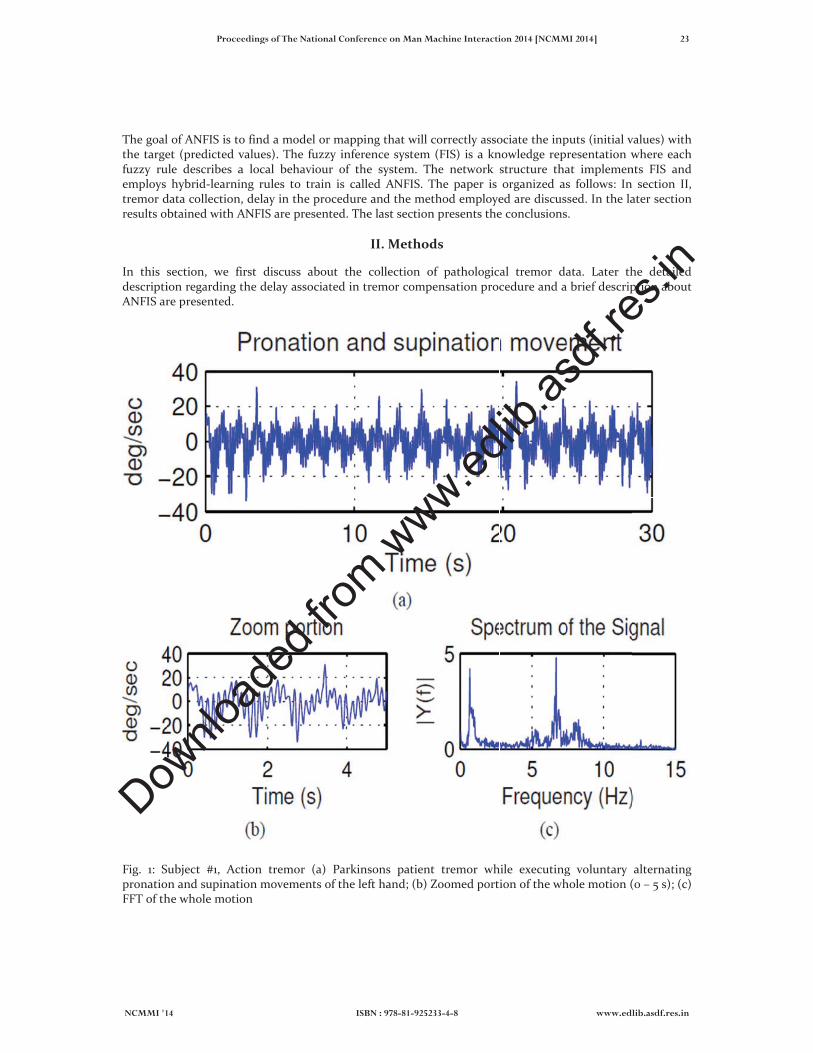
Fig. 1: SpronatioFFT of th
l of ANFIS iset (predictedule describeshybrid learn
data collectionbtained with
section, weion regardingre presented.
ubject #1, An and supinahe whole mot
to find a modvalues). Thea local beha
ning rules ton, delay in thANFIS are p
first discussg the delay as
Action tremoation movemetion
del or mappie fuzzy infereaviour of thtrain is call
he procedureresented. The
s about thessociated in t
r (a) Parkinents of the le
ng that will cence systeme system. Thled ANFIS. Tand the mete last section
II. Method
collection otremor compe
nsons patienteft hand; (b) Z
correctly asso(FIS) is a knhe network sThe paper isthod employen presents the
ds
f pathologicensation proc
t tremor whZoomed porti
ociate the inpnowledge repstructure thaorganized ased are discuse conclusions
al tremor dacedure and a
hile executingion of the wh
puts (initial vresentation wat implemens follows: Inssed. In the las.
ata. Later tha brief descrip
g voluntaryhole motion (
values) withwhere eachnts FIS andsection II,
ater section
he detailedption about
alternating(0 – 5 s); (c)
Proceedings of The National Conference on Man Machine Interaction 2014 [NCMMI 2014] 23
NCMMI '14 ISBN : 978-81-925233-4-8 www.edlib.asdf.res.in
Downloaded fro
m w
ww.e
dlib
.asd
f.re
s.in

Tremorwithout othe Ethipathologwork formotion)parkinsoshown in
The phasfilteringfilter/Butidentifiedwith pasaccuracythe appaacquired
is acquired wobjecting freeics Committgical tremor dr analysis, fouand four sub
onian patientn Fig. 1. FFT o
B
se delay in westage, to fitterworth bad for fifth ords band 2 20y was adversearent peak ind form the flex
with a portae flow of anyee of localdata set contur subjects’ abjects posturawhile volun
of the signal i
B. Latency i
earable devicilter the trend pass filterder ButterwoHz a delay oely effected. En EMG [2]. Inxion and exte
Fig. 2: D
A. Patho
able Motus sy motion [8]. Ahospital. Thtains posturaaction tremoal tremor arentarily performs also shown
in Tremor C
ces with FES iemulous motr was employorth low passof 20ms was iEMD, in genen [2], a delayension muscl
Delay in trem
ological Tre
system compAll the subjehe samplingal tremor, par (tremulousemployed. Fming pronatiin Fig. 1(c).
Compensat
is due to thetion from wyed. From ths filter, whereidentified [7]eral a delay ofy of 40 60 msle group in fo
mor suppressio
emor data
prises a gyroscts sign the irate emplo
arkinsonian ts motion collFor an illustraion and supi
tion Proced
two sources:whole sensede phase respe as with fifth]. In the presf 80§20 ms exs was identifiorearm.
on procedure
scope placednformed conyed is 100tremor and elected whileation, actionination move
dure With F
pre filteringd motion, aonse, a averah order buttesence of eithexists betweenfied between
e with FES
d on the patinsent forms adeg/sec. Theessential tremperforming atremor collecement with le
FES
stage and EMButterworth
age delay of 3erworth bander delays then peak musclsurface EMG
ient’s wristpproved bye collectedmor. In thisa voluntarycted from aeft hand as
MD. In preh low pass300 ms wasd pass filtere predictionle force andG and force
Proceedings of The National Conference on Man Machine Interaction 2014 [NCMMI 2014] 24
NCMMI '14 ISBN : 978-81-925233-4-8 www.edlib.asdf.res.in
Downloaded fro
m w
ww.e
dlib
.asd
f.re
s.in

Thus a tfrequencto aboutdecrease
A neurointelligen
A briefimpleme
In generaand linguinput nolayers noare eithedescribed
Lp
total delay ocy, 100Hz, fort 90± phased. To overcom
Fuzzy systemnt hybrid syst
descriptionentation refer
Fig
al, ANFIS struuistic variabldes represenodes functioner fixed or add as below:
Layer 1: All nparameters.
of 60 80 msr a signal withe difference.me this delay
C. Adapt
m is inspiredtem enjoys b
of ANFIS isr to [5].
g. 3: Sugeno t
ucture followles) and mulnts the traininning as membdaptive, as sh
nodes in this l
is inevitableh frequency rWith this
y, multi step
tive Neruo F
from the supoth the metr
s provided b
type fuzzy mo
ws the takagilti layers (5 lng values andbership functhown in Fig.
layer are ada
e in the procranges fromphase differprediction ba
Fuzzy Infer
pervisory humics of neural
below. For
odel illustrati
sugeno fuzzylayers), as shd output nodetions (MF’s)3 [5]. Differe
aptive. Furthe
cedure, as sh6 12 Hz, therence tremorased on ANFI
rence Syste
man brain’s fsystem and f
detailed des
ion and ANFI
y sets with sehown in Fig.es representsand rules. Alent layers an
er, parameter
hown in Fig.delay of 6 tor suppressioIS is develope
em (ANFIS)
feed forwardfuzzy logic ap
scription of
IS architectur
et of rules (co3. In this co
s predicted vall nodes in dd their corre
rs in this laye
. 2. With theo 8 samples con ability ised in this pap
activities thepproaches.
the algorith
re [5]
ombination ofonnected strualues, and inifferent layeresponding no
er are named
e samplingorrespondsdrastically
per.
erefore this
hm and its
f numericalucture, thethe hiddenrs of ANFISodes can be
as premise
Proceedings of The National Conference on Man Machine Interaction 2014 [NCMMI 2014] 25
NCMMI '14 ISBN : 978-81-925233-4-8 www.edlib.asdf.res.in
Downloaded fro
m w
ww.e
dlib
.asd
f.re
s.in

Ltt
Lcn
La
Lc
The paraLeast squThe gradbackward^ fk areoutputs)faster anbe expresin Fig. 3.
The procstep predwas conscontaine
ANFIS wmemberssquare eepochs to
Layer 2: All nthe product othis layer.
Layer 3: Likecomputes thenormalized fi
Layer 4: In thare referred a
Layer 5: Thiscomputes the
ameters of ANuares methoddient descend pass. The ethe k th desof data in th
nd reduce thessed as a line
D
cedure emplodiction, a twostructed as shed one data po
was trained wship functionrror). The opo perform the
nodes in thisof all the inpu
layer 2, eache ratio of firifiring strength
his layer, allas consequen
s layer contaie overall outp
NFIS are optd is employent method iserror measuresired and esthe training see search spacear combinati
. Multistep
oyed to perforo dimensionhown in (1). Doints:
with the first 5ns will be opptimized pare multi step
Fig. 4: Mult
layer are labeuts. Further,
h node in thiing strengthshs.
nodes are adnt parameters
ins only oneput of the sys
timized withed to updates to updatee to train thetimated outpet.Due to thece dimensionion of the con
p prediction
rm multi stepal matrix ofData points i
500 epochs. Wptimized forrameters obtaprediction.
tistep predict
elled as ¦ andthe firing stre
is layer is alsos of ith rules.
daptive. The ps.
node and thastem by summ
combinationthe parametthe premiseabove menti
put, respective implications due to backnsequent par
n of patholo
p prediction wdimensions 1n each row w
With the traiaccurate preained with th
tion of patho
d are fixed. Thength of each
o fixed and laThereby, the
parameters c
at node is alsmations of all
n of gradientters iterativelparameters
ioned ANFISvely, and n iof two updak propagatiorameters, as s
ogical trem
with ANFIS i1000£5 (eachwere chosen t
ining epochsediction (withe training e
logical tremo
he output obth rule is repre
abelled as N.e outputs of
corresponds t
so fixed andl inputs to th
t descent andly in the forwwith the ob
S is E = Pn k=1s the total nate algorithmn algorithm.shown
mor with AN
is shown in Fh row being rto be six step
s, weights of nth cost functepochs are em
or with ANFIS
tained from tesented by ea
. In this layerthis layer are
to all nodes i
labelled as Pe node.
d least squarward pass unbtained erro1(fk¡ ^ fk)2 whnumber of pams, the conver
The overall
NFIS
Fig. 4. To perfreferred to asps apart and e
neural netwotion as minimmployed for
S
this layer isach node in
r, I th nodee named as
in the layer
P. The node
es method.ntil layer 4.or signal inhere fk andairs (inputsrgence of isoutput can
form multis an epoch)each epoch
ork and themum meanthe testing
Proceedings of The National Conference on Man Machine Interaction 2014 [NCMMI 2014] 26
NCMMI '14 ISBN : 978-81-925233-4-8 www.edlib.asdf.res.in
Downloaded fro
m w
ww.e
dlib
.asd
f.re
s.in

In thissimulatio
where RMk and e is
tremulou4.
For illusperformiwhole mshown. I
section, weons. To quant
MS(s) =s the predicti
us motion for
tration, theing multi ste
motion is shown Fig. 5(c), p
analyze thetify the perfo
ion error.
rm a zero ph
prediction erep predictionwn, where asrediction err
e multi stepormance, we e
hase bandpass
rror due to tn for the samin Fig. 5 (b),ror obtained d
III. Result
ahead trememploy %Acc
m is the nu
s filter with s
the delay ofme delay for sfiltered tremdue to 80 ms
ts
mor predictiocuracy, define
umber of sam
FiAacmfilobwob
Thmshthprtonefuthgyfiffilthsepr8LSasanpr
same specific
f 80 ms andsubject #1 are
mulous motions is shown tog
on performaed as:
mples, sk is the
A. Perfor
ig. 5: MultANFIS (a) Whction tremmotion obtaltering ;btained due t
with multistbtained with
he proceduremulti step prehown in Fig.he collectedrovided for oo obtain theeural netwounctions. Forhe wholeyroscope is pfth orderlter with pashe tremulousensed motiorediction forsamples (80S SVM tossociated wind EMD. Trediction wations is emp
the predictioe shown in Fn obtained afgether with t
ance with A
e input signa
rmance An
tistep predichole motion (mor); (b)ained after(c) Predictto 80 ms delatep predictANFIS
e employedediction with4. First 500d tremoroffline traininoptimized w
ork and mr multi stepmotion senrovided as anButterworths band 2 20motion from
on. Further,6 samples (6
0ms) is perfoovercomeith bandpasTo validatewith ANFISployed, as sh
on error obtFig. 5. In Figfter bandpassthe multistep
ANFIS thru
al at instant
nalysis
ction with(Subject #1,Tremulousbandpass
tion erroray togethertion error
to performh ANFIS issamples ofdata was
ng of ANFISweights formembershipprediction,nsed withn input to a
bandpassHz to filter
m the wholemulti step60 ms) andormed withthe delayss filteringmult istep
S, filteredown in Fig.
tained afterg. 5 (a), thes filtering isp prediction
Proceedings of The National Conference on Man Machine Interaction 2014 [NCMMI 2014] 27
NCMMI '14 ISBN : 978-81-925233-4-8 www.edlib.asdf.res.in
Downloaded fro
m w
ww.e
dlib
.asd
f.re
s.in

error obtained with ANFIS for comparison. The prediction accuracy obtained for subject #1 is 49:21 § 1:21%.The average prediction accuracy obtained over all subjects and trials for 60 ms prediction length is 50 § 2%and 80 ms prediction length is 45:25 § 5%.
IV. Conclusions
In this paper, ANFIS is employed for multi step prediction of pathological tremor to overcome the phaseddelay and to improve the performance. The performance of ANFIS was experimentally assessed with thetremor data collected from eight patients. An average prediciton accuracy of 50§2% is obtained with themulti step prediction with ANFIS for 60 ms ahead prediction and an average accuracy of 45:25 § 5% isobtained for prediction length 80 ms.
References
1. R. J. Elbe and W. C. Koller, Tremor, U. MD, Ed. John Hopkins University Press: Baltimore, MD,USA, 1985.
2. P. R. Cavanagh, and P. V. Komi, “Electromechanical delay in human skeletal muscle underconcentric and eccentric contractions,” Eur. J. Appl. Physiol., vol. 42, pp. 159–163, 1979.
3. F. Widjaja, C. Y. Shee, W. L. Au, P. Poignet, and W. T. Ang, “ Using electromechanical delay forreal time anti phase tremor attenuation system using functional electrical stimulation,” Proc. Int.Conf. IEEE on Robo. Auto., Shanghai, 2011.
4. A. P. L. Bo, P. Poignet, F. Widjaja, and W. T. Ang, “Online pathological tremor characterizationusing extended kalman filtering,” in Proc. 30th Annu. Int. Conf. IEEE Eng. in Med. Bio. Soc.,Vancouver, Canada, 2008, pp. 1753–1756.
5. K. Manish, H. Nystrom, L. R. Aarup, T. J. Nottrup, and D. R. Olsen, “Respiratory motion predictionby using the adaptive neuro fuzzy inference system (ANFIS),” in Phy. in Med. Bio., vol. 50, pp. 47214728, 2005.
6. S. Tatinati, K. C. Veluvolu, S. M. Hong, W. T. Latt, and W. T. Ang, “Physiological tremor estimationwith autoregressive (AR) model and Kalman filter for robotic applications,” in IEEE Sensors J., vol.13, pp. 4977 4985, 2013.
7. K. C. Veluvolu, S. Tatinati, S. M. Hong and W. T. Ang, ” Multistep prediction of physiologicaltremor for surgical robotic applications,” in IEEE Tran. on Biomed. Eng., vol.60, pp. 3074 3082 ,2013.
8. G. N. Reeke, Modeling in the Neurosciences, www.MotusBioengineering.com.
Proceedings of The National Conference on Man Machine Interaction 2014 [NCMMI 2014] 28
NCMMI '14 ISBN : 978-81-925233-4-8 www.edlib.asdf.res.in
Downloaded fro
m w
ww.e
dlib
.asd
f.re
s.in