mpc introduction - cepaccepac.cheme.cmu.edu/pasi2011/library/bequette/bwb-pasi2011-mpc... ·...
TRANSCRIPT

Chemical and Biological Engineering
MPC Introduction
B. Wayne Bequette
• Overview• Basic Concept of MPC• History
• Optimization Formulation• Models• Analytical Solution to Unconstrained Problem
• Summary• Limitations & a Look Ahead

B. Wayne Bequette
Motivation: Complex Processes
LC
PC
PC PC PC
LC LC
LC
cooling water
Toluene
Hydrogen
purge Hydrogen, Methane
fuel gas
steam
steamsteam
Diphenyl
Benzene product
CH4
Recycle Toluene
CC
TC
TCReactor
Rec
ycle
Col
umn
Ben
zene
Col
umn
Stab
ilize
r
Flas
h
Recycle Compressor
cooling water
CW
CW
quenchTC
LC LC
LCTC
open
FC
FC
FC
FC
TC
CC
TC

B. Wayne Bequette
Important Issues in Petroleum Refining
Multivariable, Large ScaleChallenge to tune individual SISO controllers
Operation at ConstraintsAnti-reset windup and other strategies for PID
Economic Payout for Advanced ControlEconomic return justifies capital and on-going maintenance costs
Model Predictive ControlEvolved independently in the US and France refining industry

B. Wayne Bequette
How is MPC used?Unit 1 - PID Structure
Global Steady-StateOptimization(every day)
Local Steady-StateOptimization(every hour)
DynamicConstraintControl(every minute)
SupervisoryDynamicControl(every minute)
Basic DynamicControl(every second)
Plant-Wide Optimization
Unit 1 Local Optimization Unit 2 Local Optimization
High/Low Select Logic
PID Lead/Lag PID
SUM SUM
ModelPredictiveControl(MPC)
Unit 1 Distributed ControlSystem (PID)
Unit 2 Distributed ControlSystem (PID)
FCPC
TCLC
FCPC
TCLC
Unit 2 - MPC Structure
From Tom Badgwell, 2003 Spring AIChE Meeting, New Orleans
B. Wayne Bequette
Model Predictive Control (MPC)
t kcurrent step
setpoint
yactual outputs (past)
PPrediction Horizon
past control moves
u
max
min
MControl Horizon
past future
model prediction
t k+1current step
setpoint
yactual outputs (past)
PPrediction Horizon
past control moves
u
max
min
MControl Horizon
model prediction from k
new model prediction
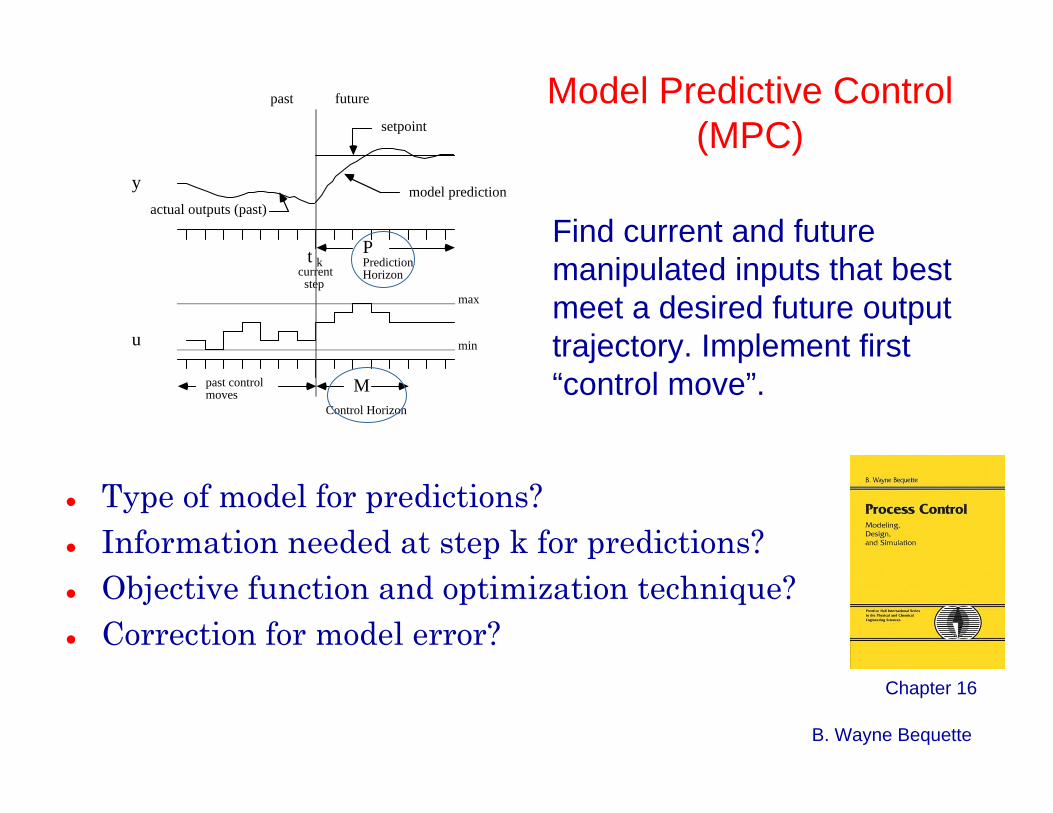
Find current and future manipulated inputs that best meet a desired future output trajectory. Implement first “control move”.
Type of model for predictions?Information needed at step k for predictions?Objective function and optimization technique?Correction for model error?
Chapter 16

B. Wayne Bequette
Model Predictive Control (MPC)
t kcurrent step
setpoint
yactual outputs (past)
PPrediction Horizon
past control moves
u
max
min
MControl Horizon
past future
model prediction
t k+1current step
setpoint
yactual outputs (past)
PPrediction Horizon
past control moves
u
max
min
MControl Horizon
model prediction from k
new model prediction
At next sample time:
Correct for model mismatch,then perform new optimization.
This is a major issue –“disturbances” vs. model uncertainty
Find current and future manipulated inputs that best meet a desired future output trajectory. Implement first “control move”.

B. Wayne Bequette
MPC HistoryIntuitive
Basically arose in two different “camps”
Dynamic Matrix Control (DMC)1960’s and 1970’s – Shell Oil - US
Related to techniques developed in France (IDCOM)Large-scale MIMOFormulation for constraints important
Generalized Predictive Control (GPC)Evolved from adaptive controlFocus on SISO, awkward for MIMO
Charlie Cutler
(1976)

B. Wayne Bequette
Objective Functions
( ) ∑∑−
=+
=++ Δ+−=
1
0
2
1
2ˆM
iik
P
iikik uwyrJ
Quadratic Objective Function, Prediction Horizon (P) = 3, Control Horizon (M) = 2
With linear models, results in analytical solution (w/o constraints)
General Representation of a Quadratic Objective Function
( ) ( ) ( )2
12
233
222
211 ˆˆˆ
+
++++++
Δ+Δ+
−+−+−=
kk
kkkkkk
uwuw
yryryrJ
Weight 2 control moves
3 steps into future

B. Wayne Bequette
Alternative Objective Functions
( ) ∑∑−
=+
=++ +−=
1
0
2
1
2ˆM
iik
P
iikik uwyrJ
∑∑−
=+
=++ Δ+−=
1
01
ˆM
iik
P
iikik uwyrJ
Penalize u rather than Δu
Sum of absolute values (results in LP)
Will usually result in “offset”
Existing LP methods are efficient, but solutions hop from one constraint to another

B. Wayne Bequette
Models
State SpaceARX (auto-regressive, exogenous input)Step ResponseImpulse (Pulse) Response
Nonlinear, Fundamental (First-Principles)ANN (Artificial Neural Networks)Hammerstein (static NL with linear dynamics)VolterraMultiple Model
B. Wayne Bequette
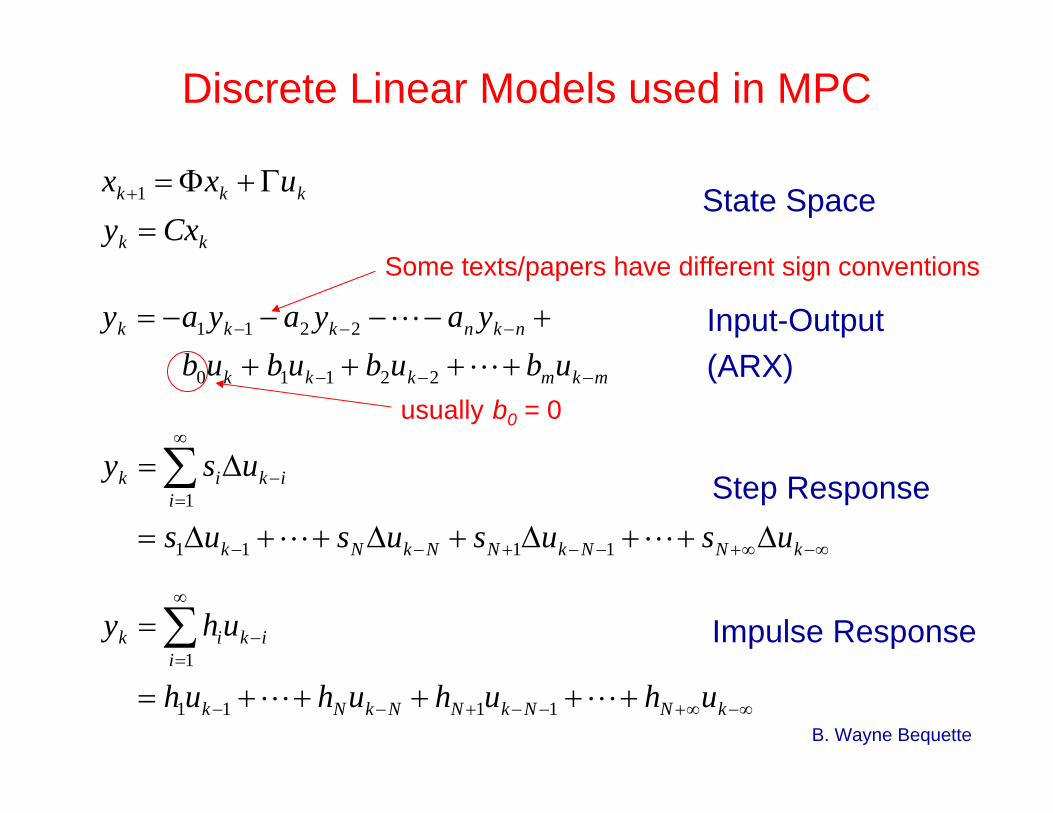
Discrete Linear Models used in MPC
∞−∞+−−+−−
∞
=−
+++++=
=∑kNNkNNkNk
iikik
uhuhuhuh
uhy
LL 1111
1
kk
kkk
Cxyuxx
=Γ+Φ=+1 State Space
Input-Output(ARX)mkmkkk
nknkkk
ububububyayayay
−−−
−−−
+++++−−−−=
L
L
22110
2211
Step Response
usually b0 = 0
Some texts/papers have different sign conventions
Impulse Response
∞−∞+−−+−−
∞
=−
Δ++Δ+Δ++Δ=
Δ=∑kNNkNNkNk
iikik
usususus
usy
LL 1111
1
B. Wayne Bequette
-2 0 2 4 6 8
0
0.5
1
1.5
2
temp, deg C
discrete-time step
-2 0 2 4 6 8
0
0.2
0.4
0.6
0.8
1
discrete-time step
psig
s 1
ss
s
s
2
4 53
Etc.
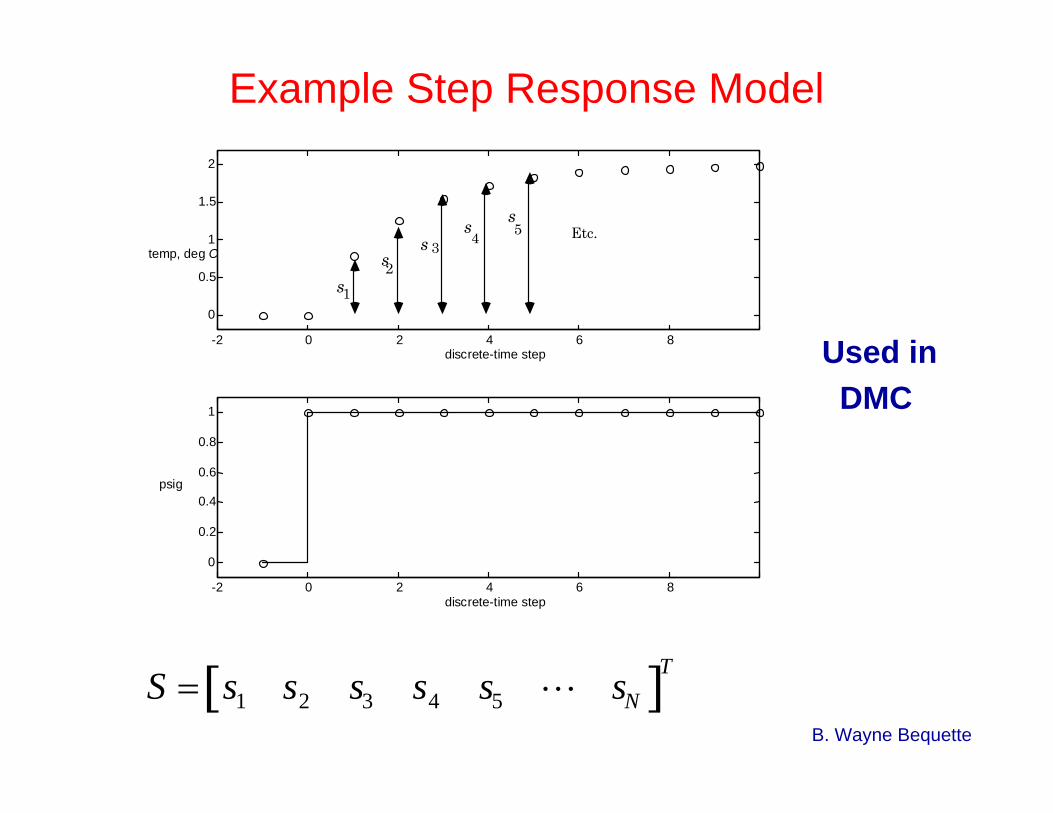
S = s1 s2 s3 s4 s5 L sN[ ]T
Example Step Response Model
Used inDMC
B. Wayne Bequette
-2 0 2 4 6 8 10
0
0.2
0.4
0.6
0.8
1
discrete-time step
psig
-2 0 2 4 6 8 10-0.2
0
0.2
0.4
0.6
0.8
1
discrete-time step
temp, deg Ch
hh
1 2
3
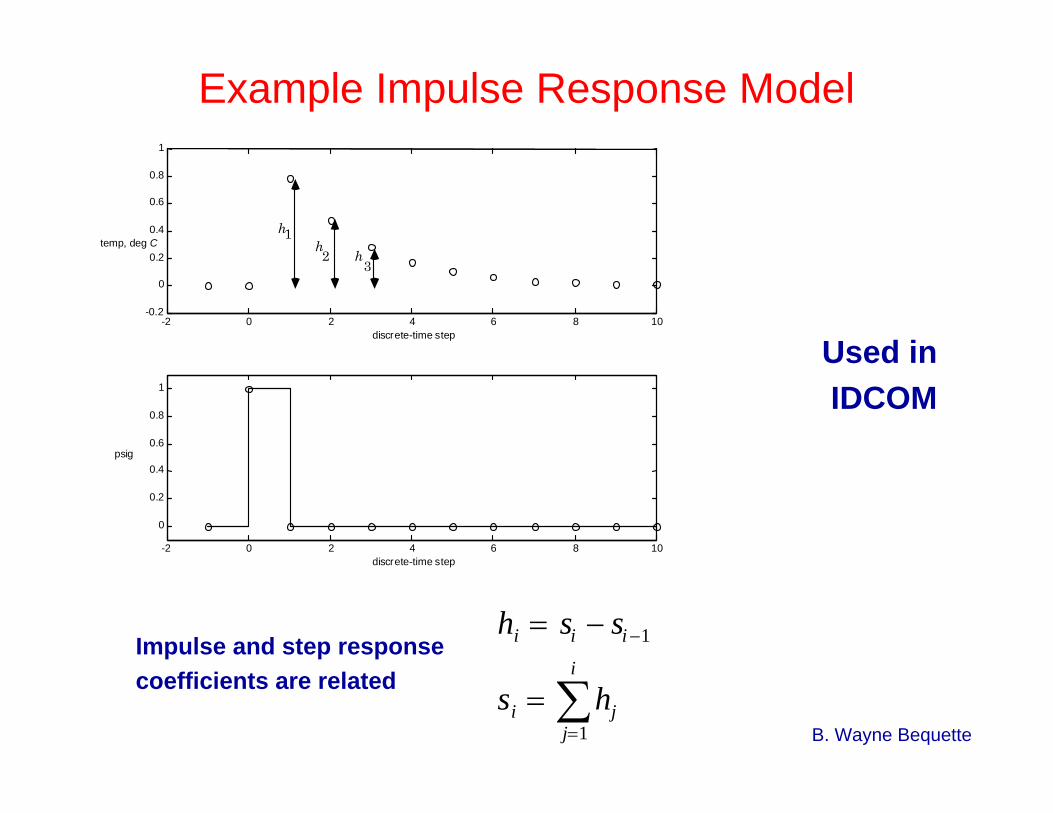
hi = si − si−1
si = hjj=1
i
∑
Example Impulse Response Model
Impulse and step responsecoefficients are related
Used inIDCOM
B. Wayne Bequette
Step & Impulse Models from State Space Models
ΓΦ= −1ii CH
∑∑==
− =ΓΦ=k
ii
k
i
ik HCS
11
1
kk
kkk
Cxyuxx
=Γ+Φ=+1

B. Wayne Bequette
MPC based on State Space Models
kk
kkk
xCyuxx
1
=Γ+Φ=+
with known current state, easy to propagate estimates
kkkk
kkk
uCxCCxyuxx
Γ+Φ==Γ+Φ=
++
+
11
1
and, using control changes
kkkk
kkk
uCuCxCyuuu
ΓΔ+Γ+Φ=Δ+=
−+
−
11
1

B. Wayne Bequette
Use ^ notation for model states
kkkkkk uCuCxCy ΓΔ+Γ+Φ= −+ 1||1 ˆˆ
Measurements through k
Estimate at k+1 Estimate at k
Measurements through k
Predicted output
Stateestimate
Previousinput
CurrentInputchange
Now, propagate the prediction for P steps into the future

B. Wayne Bequette
Output Predictions
44444444 344444444 21
M
L
MM
L
44444 344444 21
MMM
response "forced"
1
1
1
1
1
1
1
made) are moves control more no (if response" unforced"or "free"
1
1
1
|
2
|
|2
|1
0000
ˆ
ˆ
ˆˆ
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
Δ
ΔΔ
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
ΓΦΓΦ
ΓΓ+ΦΓΓ
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
ΓΦ
Γ+ΦΓΓ
+
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
Φ
ΦΦ
=
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
−+
+
−
=
−
=
−
−
=
−
+
+
+
∑∑
∑
Mk
k
k
P
i
iP
i
i
kP
i
i
kk
PkPk
kk
kk
u
uu
CC
CCCC
u
C
CCC
x
C
CC
y
yy
fSfuΔ
fY

B. Wayne Bequette
Output Predictions
444444 3444444 21
M
L
MM
L
444 3444 21
MMM
response "forced"
1
1
11
12
1
made) are moves control more no (if response" unforced"or "free"
12
1
|
2
|
|2
|1
0000
ˆ
ˆ
ˆˆ
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
Δ
ΔΔ
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
+
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
Φ
ΦΦ
=
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
−+
+
+−−
−
+
+
+
Mk
k
k
MPPP
k
P
kk
PkPk
kk
kk
u
uu
SSS
SSS
u
S
SS
x
C
CC
y
yy
fSfuΔ
fY
Step response coefficients
B. Wayne Bequette
Optimization Problem
( ) ( ) Tik
M
i
uTik
P
ikikkik
yTkikkiku
uWuyrWyrJf
+
−
=+
=++++Δ
ΔΔ+−−= ∑∑1
01|||| ˆˆmin
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=y
y
Y
W
WW
000000
O
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=u
u
U
W
WW
000000
O
EWE YT ˆˆf
UTf uWu ΔΔ
Where
ff uSfrYrE Δ−−=−= ˆˆ
E
ff uSEE Δ−=ˆ
and
so
“unforced” (freeresponse) error
future setpoints

B. Wayne Bequette
Optimization Problem
( ) ( )ff
YTf
Tf
YTf
Tf
YT
ffYT
ffYT
uSWSuEWSuEWE
uSEWuSEEWE
ΔΔ+Δ−=
Δ−Δ−=
2
ˆˆ
fUT
f uWu ΔΔ+=Δ
Jfu
min EWE YT ˆˆ
( ) EWSuuWSWSu YTf
Tff
Uf
YTf
Tf Δ−Δ+Δ 2=
ΔJ
fumin
so
can be written
0=Δ∂∂ fuJ
and the unconstrained solution is found from

B. Wayne Bequette
Unconstrained Solution
In practice, do not actually invert a matrix. Solve asset of simultaneous equations (or use \ in MATLAB)
( ) EWSWSWSu YTf
Uf
YTff \+=Δ
Analytical Solution for Unconstrained System
( ) EWSWSWSu YTf
Uf
YTff
1−+=Δ
“unforced” error

B. Wayne Bequette
Vector of Control Moves
43421
M
moves future andcurrent
1
1
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
Δ
ΔΔ
=Δ
−+
+
Mk
k
k
f
u
uu
u
Although a set of control moves is computed, only thefirst move is implemented
The next output at k+1 isobtained, then a new optimization problem is solved
kuΔ

B. Wayne Bequette
MPC Tuning Parameters
Prediction Horizon, P
Control Horizon, M
Manipulated Input Weighting, Wu
Usually, P >> M for robustness (less aggressive action). Sometimes M = 1, with P varied for desired performance.
Sometimes larger input weights for robustness

B. Wayne Bequette
CainF
CbF
Example Inverse Response Process: Van de Vusse
Constant V,T, ρ
A B Ck1 k2
A+A Dk3
dCadt = -k1Ca - k3Ca2 + (Cain - Ca)u
dCbdt = k1Ca - k2Cb - Cbu where u = F/V

B. Wayne Bequette
Example: Inverse Response Process
0 10 20 30 40 50-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
discrete time index, i
s(i)
step response coefficients
First four coefficients are negative
Sum of first eight coefficients is positive

B. Wayne Bequette
Closed-Loop: Compare P=10, M=1 with P=25, M=1
0 1 2 3 4 5 6-0.5
0
0.5
1
1.5
y, m
ol/l
time, min
0 1 2 3 4 5 6
0
1
2
3
u, m
in- 1
time, min
P = 10, M = 3P = 25, M = 1
P = 10, M = 3P = 25, M = 1
Short prediction horizons &long control horizons leadto more aggressive action

B. Wayne Bequette
Results
0 1 2 3 4 5 6-1.5
-1
-0.5
0
0.5
1
1.5
y, m
ol/l
time, min
P = 8P = 7
0 1 2 3 4 5 6-6
-4
-2
0
2
u, m
in- 1
time, min
P = 8P = 7
Control Horizon: M = 1, Weighting: W = 0
P=7:Unstable

B. Wayne Bequette
Stability of Inverse Response Systems with DMC
For a control horizon, M = 1, closed-loop MPC will be stable for a prediction horizon where the sum of the impulse response coefficients has the same sign as the process gain
0min
1>∑
=
P
iis
For the example, Pmin = 8, so P = 7 = unstable

B. Wayne Bequette
Summary
Concise overview of MPC
State space model, unconstrained solution
Have not discussedState estimation and “corrected outputs”DisturbancesConstraintsOther model forms