more pbm - heriotruth/year4ves/slides12/l12.pdf · •physx engine and ppu. free-or-nearly physics...
TRANSCRIPT

More PBM
Ruth Aylett

Overview
Collisions Deformable objects
– Hookes law– Cloth– Flesh
Fluids Plants Physics engines
Collision response
When objects collide they apply forceson each other
Collisions can be:– elastic, where no kinetic energy is lost
during the collision– inelastic, where kinetic energy is lost

Collision response
Consider a collision between 2 balls An impulse force, P, acts for a very
short timem1 ( v1
after - v1before ) = -f
m2 ( v2after - v2
before ) = f
Thereforem1v1
after + m2v2after = m1v1
before +m2v2
before
f
f
v1
v2
m1
m2
Collision response
We can define the velocity at which the 2 ballsapproach each other as:
vrelbefore = v1
before - v2before
and the speed at which they separate as:vrel
after = v1after - v2
after
Inelastic collisions can be simulated with acoefficient of restitution, e (between 0 and 1)
vrelafter = -e vrel
before
Collision response
We can calculate the impulse force, f, for a perfectlyelastic collision
f = 2 m1 m2 * ((v1 x v2).n) * n
m1+m2
where n is the normal at the point of collision (equaland opposite for each ball)
for 2 spheres n is the normalised vector between thecentres of the 2 spheres
Collision response
We can implement a simulation ofcollisions in the following way:– test for collision (check distance between the
centres of the balls)– if a collision occurs, calculate the impulse
force, P– add that force to the total force for the object
and continue the standard simulation loop

Deformable objects
Deformable or soft objects can also besimulated using physical laws– jelly– cloth– flesh

Deformable objects
Modelling Approach– Spring and dashpot elements– Hooke’s law– Replace polygon edges with springs– Extend to allow cutting and fracture

Hooke’s Law Theory
– Consider a spring with restlength, L
– Let the extension of the springbe δL
– Let the coefficient of restitutionbe k
L+δLL

Hooke’s Law
The force generated in the spring isgiven by:
f = -k δL L
– The same expression works for springcompression, except δL is negative
– The dashpot element is included in thesystem to add some drag, reducing totalenergy
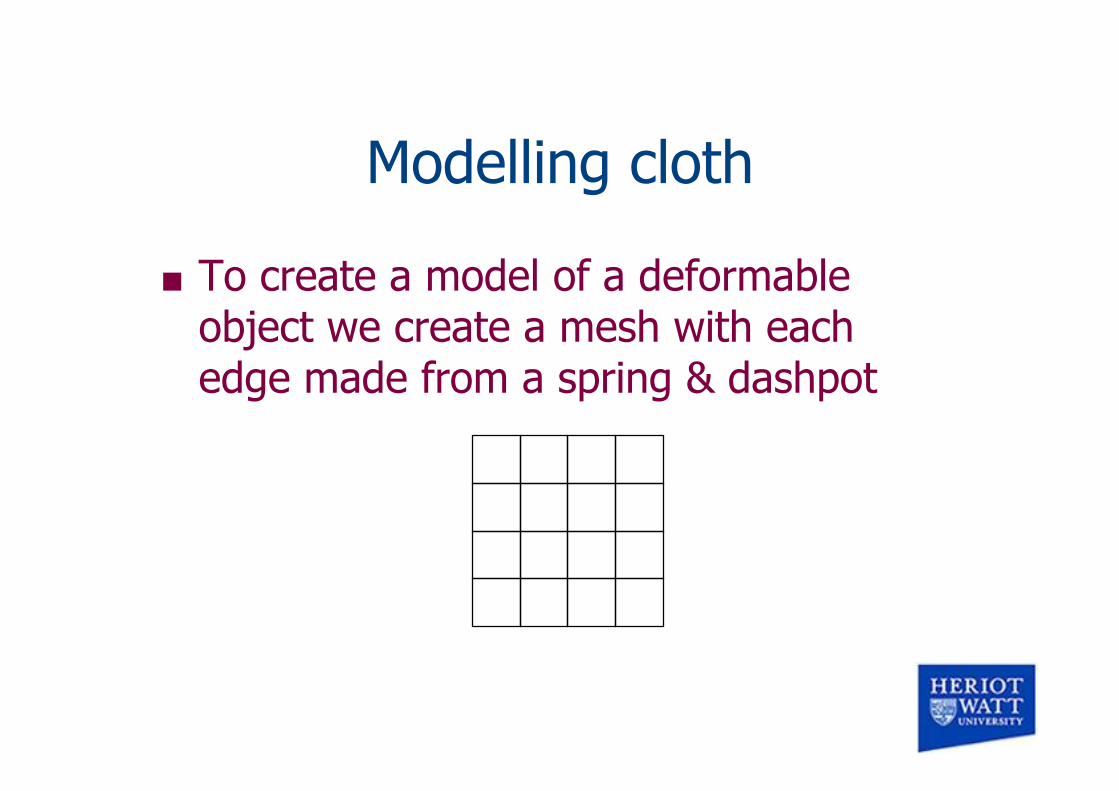
Modelling cloth
To create a model of a deformableobject we create a mesh with eachedge made from a spring & dashpot
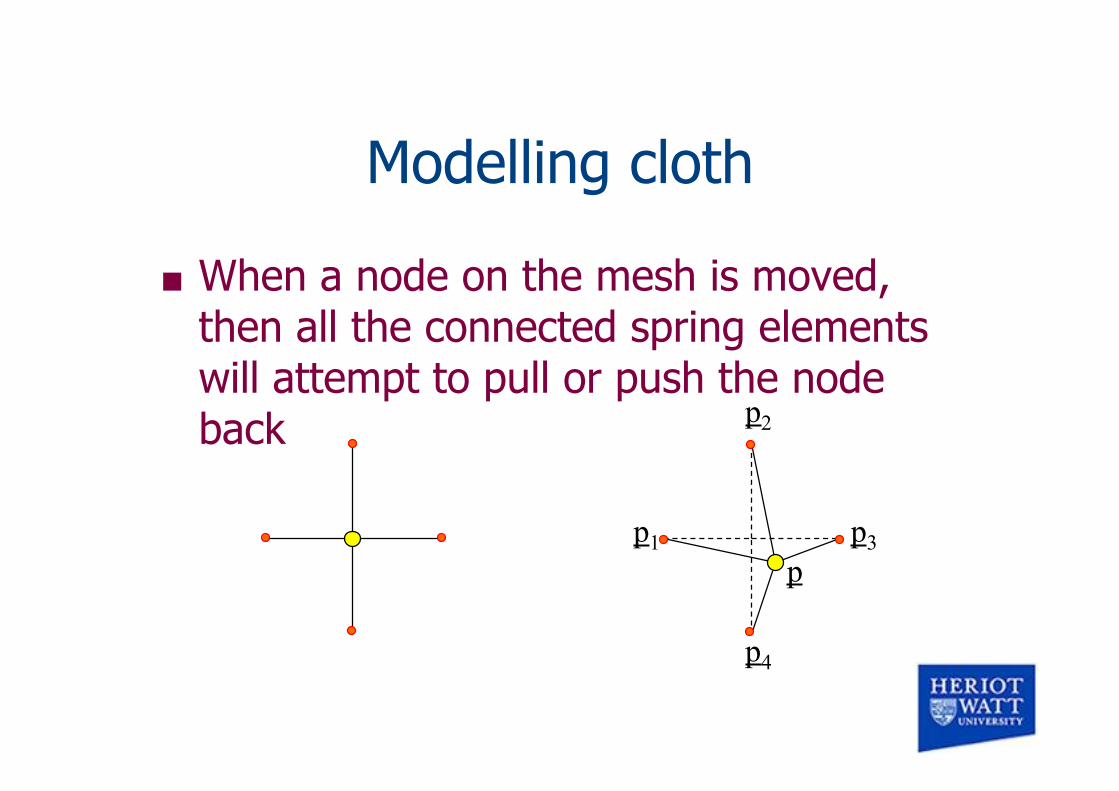
Modelling cloth
When a node on the mesh is moved,then all the connected spring elementswill attempt to pull or push the nodeback
p1 p3
p4
p2
p
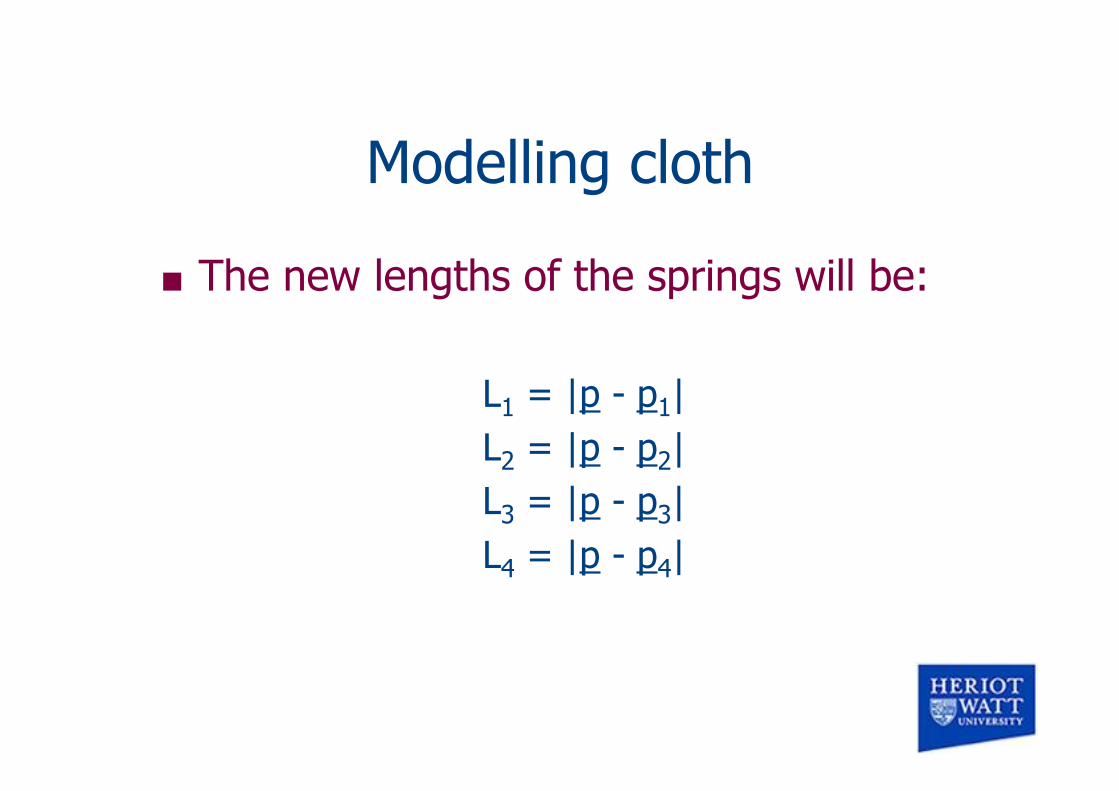
Modelling cloth
The new lengths of the springs will be:
L1 = |p - p1|L2 = |p - p2|L3 = |p - p3|L4 = |p - p4|

Modelling cloth
So the force on the node is:f1 + f2 + f3 + f4
wherefi = k * (Li - L) * ( pi - p )
L– note that each fi points in the direction of the
associated spring– once the forces have been added, the acceleration
can be found ( f / m = a)
normalised
Modelling cloth
We can the use our standard simulationloop to calculate new velocities andpositions for the node
When we have a mesh with many nodes wecalculate each step on all nodessimultaneously

Problems
Retaining the original structure– When these routines are applied to 3D objects,
they can easily lose their original shape
Solution– Record the original locations of the object’s nodes– Connect extra imaginary springs between the
original and current location of each node– Use a smaller value of k for these imaginary
springs
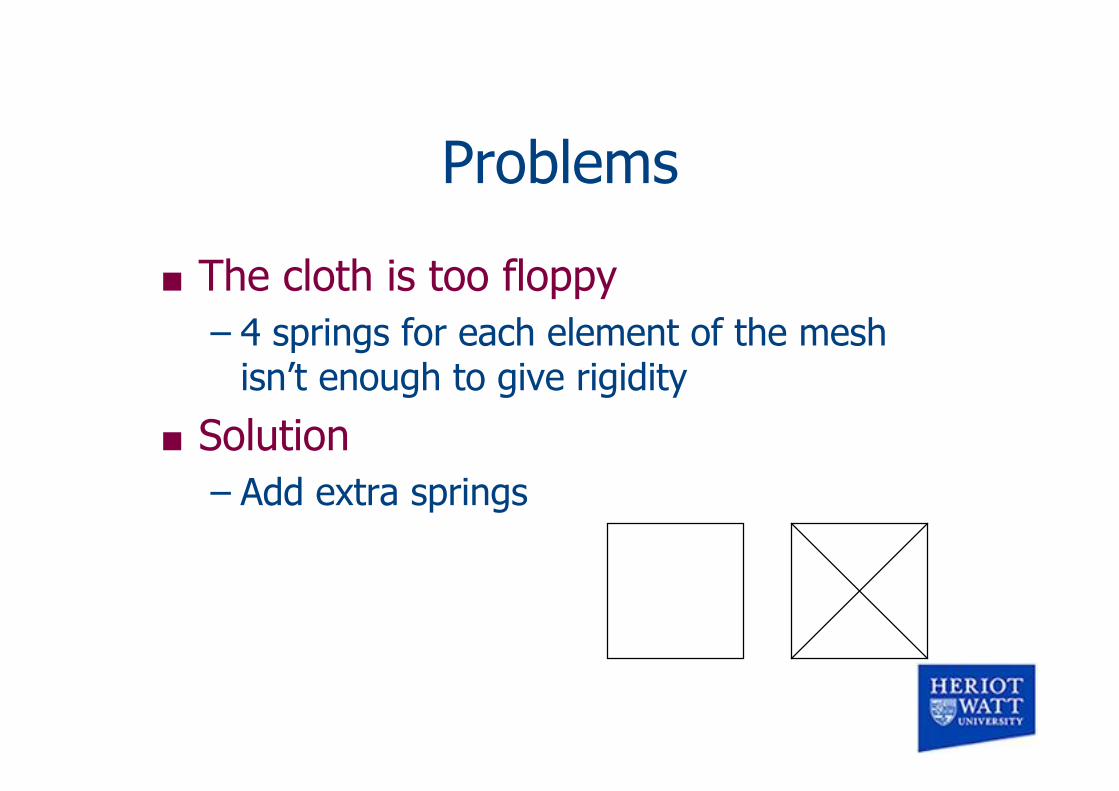
Problems
The cloth is too floppy– 4 springs for each element of the mesh
isn’t enough to give rigidity
Solution– Add extra springs

Modelling flesh
Case with no cutting / fracture– same as for cloth, but create a 3D mesh
with cubic elements
Modelling flesh
Case with cutting and fracture– More complex, need to introduce a method
to cut the forces between nodes– Introduce the concept of plates
• Each plate is a separate element• Each plate is connected to its neighbours by
filaments• Each filament is non elastic - it merely conducts
forces between neighbouring plate nodes
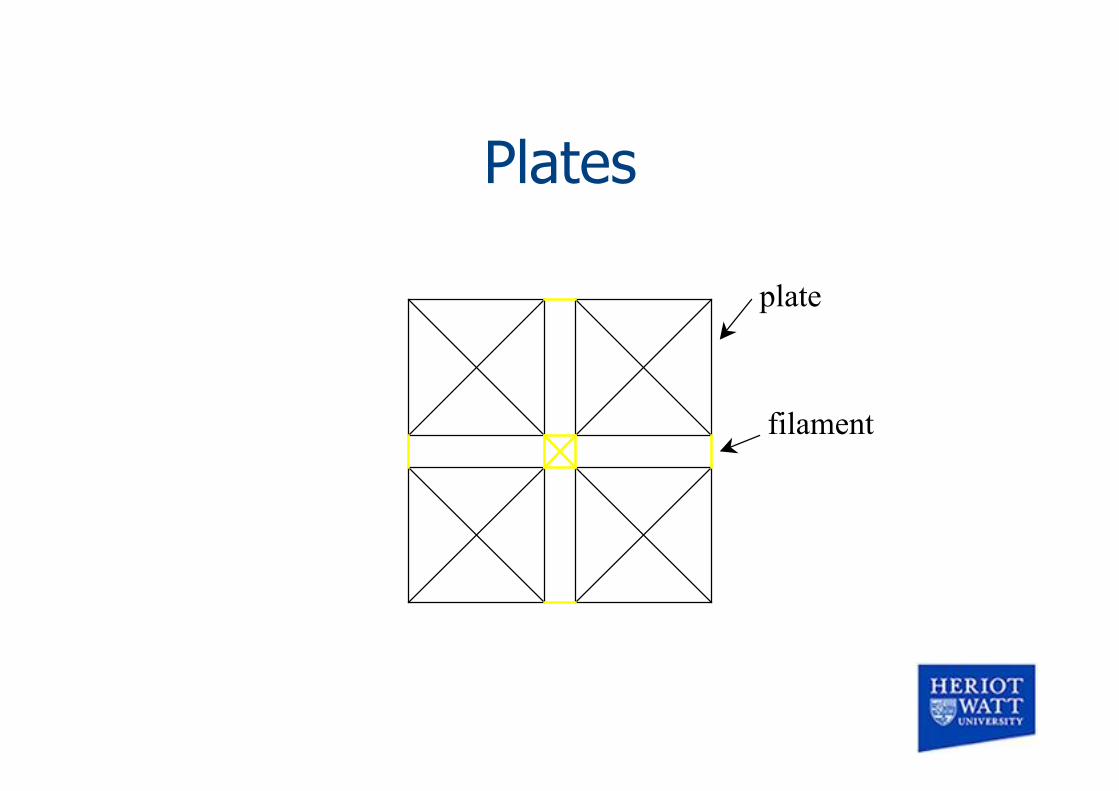
Plates
filament
plate

Controlling movement When no cut has taken place, the filaments
act to:– keep the nodes of the plates together– transmit forces from one node to another
Process is to calculate the forces on all nodeswithin each plate
If a node n1 from one plate and a node n2from another plate are connected then applythe forces from n1 to n2 and vice versa

Cutting
To cut the flesh, merely delete theconnections for appropriate filaments
To get the flesh to peel back whencutting / tearing, stretch the fleshbefore the simulation starts

Fracture
To simulate fracture (ripping, tearing), set amaximum force that the filament can conduct
If the total force conducted exceeds thefracture force then cut the filamentautomatically
By setting slightly different fracture forces foreach filament, we get irregular ripping effects

Problems
This method can be unstable Physical values have to be chosen
carefully Structure is very important
Fluid simulation
Three methods used for this:– Lattice Boltzmann Method (LBM);– Navier-Stokes (NS) solvers– Smoothed Particle Hydrodynamics (SPH)
All require substantial amounts ofcomputation
Simplified simulation also used: O’Brien& Hodgins
Computational Fluid Dynamics
Start with:– an arbitrary distribution of fluid– submerged or semi-submerged obstacles
Discretise the fluid volume into a 3Darray of box shaped elements
CFD
Velocity and pressure are:– defined throughout the fluid– updated throughout the simulation, using a
set of finite difference expressions– used to drive a height field equation to
create a surface for liquids

Boundary conditions
Boundary conditions can be used to– represent the edges of the mesh
• open, allowing fluid to flow in and out• closed
– represent the surface of a liquid– represent stationary obstacles
• sea bed• rocks

CFD
A variety of effects occur naturally from thismethod– waves
• reflection• refraction• diffraction
– rotational effects• eddies• vorticity• splashing

CFD
We can visually represent the fluid in 2ways– as a heightfield to represent the surface of
a liquid– as a collection of massless particles moving
through the fluid
Simple fluids
Navier Stokes provides an accurate, butcomputationally intensive solution
O’Brien and Hodgins provide analternative solution which is– simpler– less accurate– less detailed

Simplified representation
This method startsby considering thefluid body as a 2Dgrid rather than a 3Dgrid
Each elementrepresents a columnof fluid
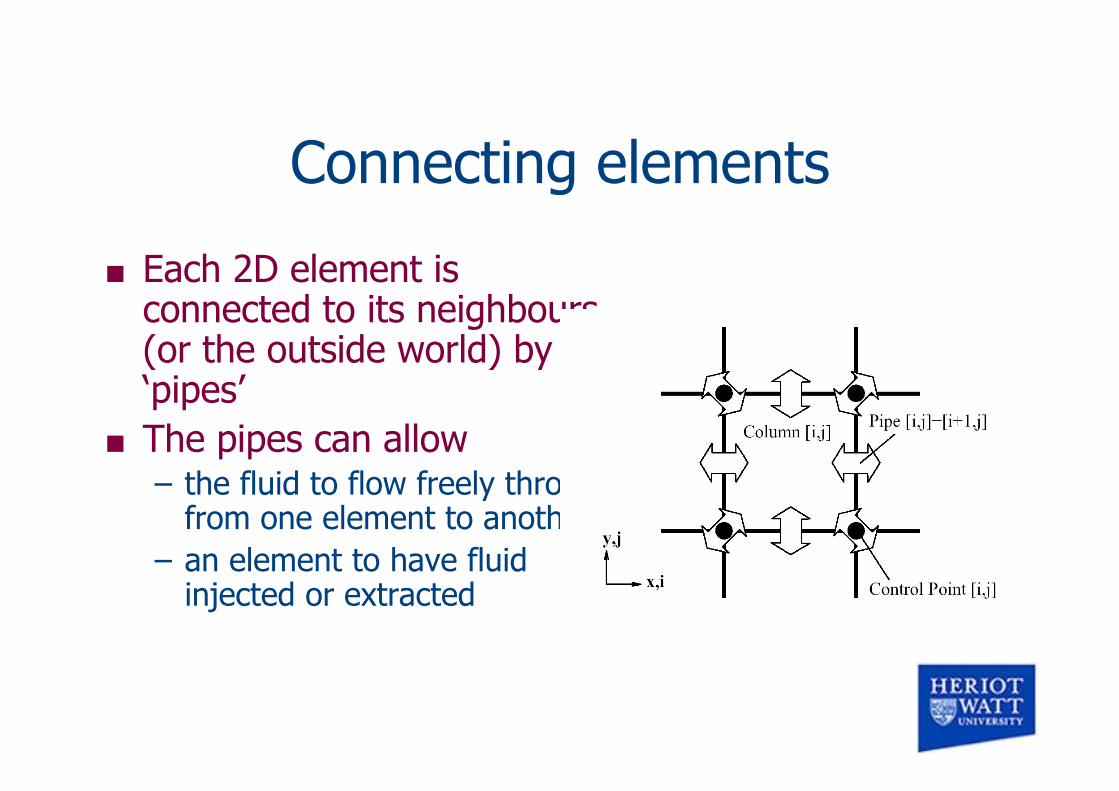
Connecting elements
Each 2D element isconnected to its neighbours(or the outside world) by 8‘pipes’
The pipes can allow– the fluid to flow freely through
from one element to another– an element to have fluid
injected or extracted

Fluid flow in pipes
The equations to determine the fluid flow in the pipes arebased on laws for hydrostatic pressure
The static pressure, H, in column i,j isHij = hijρg + p0 + Eij
where– h is the column height– g is gravity– ρ is the density of the fluid
– p0 is the atmospheric pressure– Eij is an external pressure applied by other objects

Constraints
We must also apply some constraints tothe system– The flows at each end of a pipe must be
equal and opposite– A column may not have a negative volume

Checking pipes
To ensure that no column has anegative volume– at the end of each update, the volume of
each column is tested– if the volume is negative, scale back the
pipes removing fluid from the column– repeat this procedure until all columns
have a non-negative volume

Setting the boundaries
Columns that are on the edge of thegrid have pipe connections to theoutside world
As there is no column at the other end,we must specify the flow in the pipe– barrier - set the flow to zero– fluid source - positive flow– fluid sink - negative flow

Fluid surface
We can representthe fluid with aheightfield surface
The surface is madeof triangles / quads,joining controlpoints

Plants
Apart from L-Systems (Lindenmeyer)can also model plants with voxels– A voxel is like a 3D pixel
Voxel space automata (Greene)
Voxel automata
This technique models plants withstochastic (random) growth
The space in which the plant grows isdiscretised into voxels
This technique is particularly good formodelling climbing / rambling plants
Growing the plant
The growth of the plant is affected by– occlusion (availability of light)– intersection (colliding with objects)– proximity (stick to walls, ramble over other
objects) These features are recorded within the
voxels

Probabilistic growth
The growth of the plant is probabilistic– test several different options for the next
bit of growth– for each option assess how good the
conditions are in the new position– choose and apply the best option

Light levels
Light levels are modelled with theassessment of occlusion
Each voxel assesses– amount of sunlight [ 0 .. 1 ]– amount of sky light [ 0 .. 1 ]
The amounts of these types of light arecalculated using ray casting

Light from the sky
Sky light– rays are cast from a voxel to points all over
the sky– if the ray hits an object before it gets to
the sky it is occluded [0]– otherwise it is exposed [1]– the average occlusion of all the rays can
then be calculated

Light from the sun
Sunlight– the 180 degree arc forming the trajectory
of the sun is determined– rays are cast from the voxel to the arc– rays are assessed for occlusion / exposure
The average occlusion is calculated
Growth cycle
Growth is affected by the amounts of lightavailable– The plant has acceptable max, min light levels
specified
Also assess all voxels for the presence ofobjects within each voxel (including bits ofthe plant)– Allows assessment of proximity, intersection
Once we know the conditions for all voxels,we can proceed with one stage of growth
Updating growth
Once a stage of growth has occurredthe voxel space is updated
Identify changes in– occlusion– intersection– proximity
Then another stage of growth can bestarted

Physics engines
Graphics programmers do not want to learnphysics– So specialist graphics libraries seemed a really
good idea
Now incorporated into most games engines– UT, Half-life, Unity etc– Also in Director, Flash (2D), Flex, Blender
Physics Processing Unit (2006)– A physics card in spirit of a graphics card– Physics processing now part of Nvidia and ATI
graphics cards
Physics engines available
Commercial– Havok
– www.havok.com
• Which took over Ipion• Used in Director, Half-life
– Now merged with Euphoria– NVidia took over Ageia Feb 2008
• PhysX engine and PPU
Free-or-nearly physics engines
Lots and lots! See http://en.wikipedia.org/wiki/Physics_engine– ODE - Open Dynamics Environment
• Rigid body dynamics, C/C++ API, mature, big community• http://opende.sourceforge.net/
Bullet• http://bulletphysics.org/wordpress/
The Physics Engine• http://www.thephysicsengine.com/
Newton game dynamics• http://www.newtondynamics.com/
Physics Abstraction Layer - PAL– Interface to variety of physics engines
• http://www.adrianboeing.com/pal/