minimization of stopping time of disc brake
TRANSCRIPT

Minimization of Stopping time of disc brakebyPRADEEP RAJA MUTHUNAGALINGAM
LANKA MITRA RAMAKRISHNA
DUC LEE
PROJECT SUPERVISOR: DR.MARCA LAM

Disc Brakes
THE DEVELOPMENT AND USE OF DISC-TYPE BRAKES BEGAN IN ENGLAND IN THE 1890S.
THE FIRST CALIPER-TYPE AUTOMOBILE DISC BRAKE WAS PATENTED BY FREDERICK WILLIAM LANCHESTER IN HIS BIRMINGHAM, UK.

Factors
Disc brake is a type of brake that uses calipers to squeeze pairs of pads against a disc in order to create friction. So, we have Torque which is generated by the clamp load on the Disc and also Pressure acting on the disc.
Retards the rotation of a shaft such as a vehicle axle, either to reduce its rotational speed or to hold it stationary.
The energy of motion is converted into waste heat which must be dispersed. The disc brake absorbs maximum energy.Conduction takes place with the material and through convection and Radiation it is spread to surroundings. So, Temperature on disc is considered.

Objective Function and Constrains
Based on the Temperature , Pressure and Torque on the disc due to application of clamp load.
The time in which the rotor decelerates depends on the load applied.
Design parameters such as Inner diameter and Outer diameter of the disc play a major role in absorbing and sustaining the clamp load applied.
So the major Objective is to minimize the stopping time in which by choosing the best fit values for Inner diameter and Outer diameter of the disc where the constraints are Temperature, Pressure and Torque.
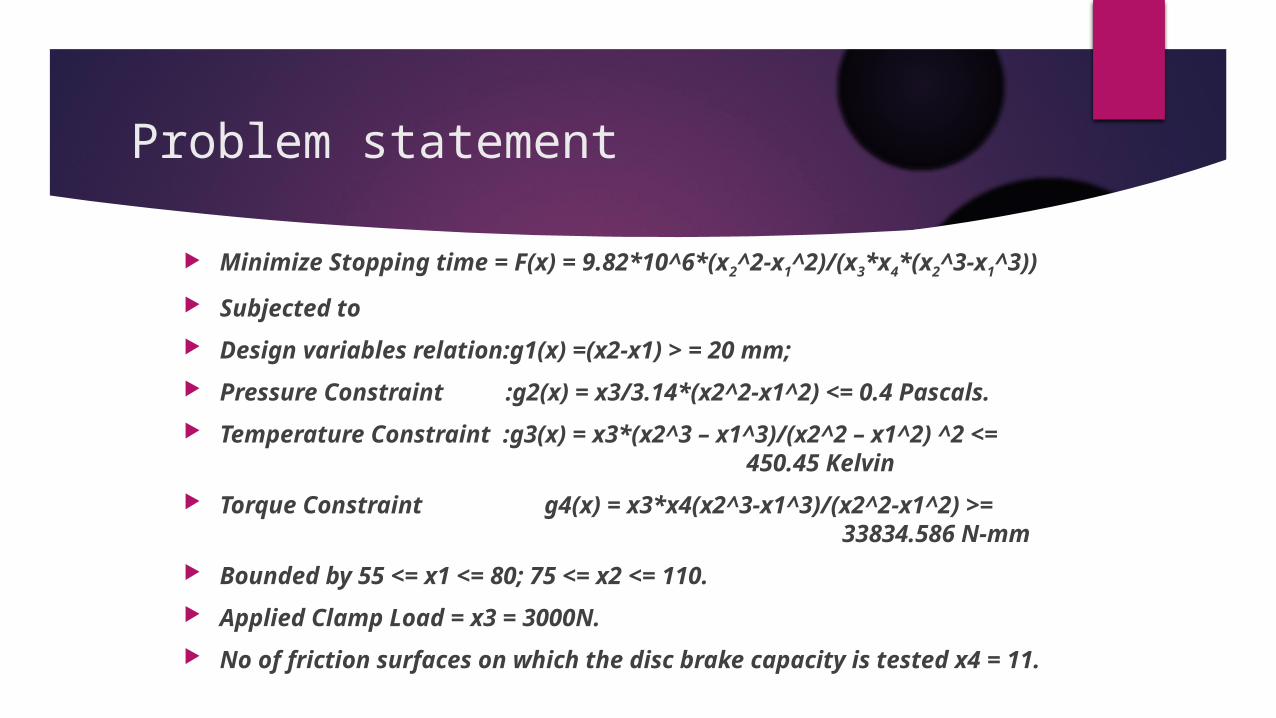
Problem statement
Minimize Stopping time = F(x) = 9.82*10^6*(x2^2-x1^2)/(x3*x4*(x2^3-x1^3))
Subjected to
Design variables relation:g1(x) =(x2-x1) > = 20 mm;
Pressure Constraint :g2(x) = x3/3.14*(x2^2-x1^2) <= 0.4 Pascals.
Temperature Constraint :g3(x) = x3*(x2^3 – x1^3)/(x2^2 – x1^2) ^2 <=
450.45 Kelvin
Torque Constraint g4(x) = x3*x4(x2^3-x1^3)/(x2^2-x1^2) >=
33834.586 N-mm
Bounded by 55 <= x1 <= 80; 75 <= x2 <= 110.
Applied Clamp Load = x3 = 3000N.
No of friction surfaces on which the disc brake capacity is tested x4 = 11.

Types of Optimization methods implemented
The type of Optimization methods implemented are:
A. Optimization tool box – feature in MATLAB.
B. Exterior Penalty function method
C. Extended- Interior penalty function method.

Optimization toolbox
The MATLAB toolbox provides functions for finding parameters that minimize or maximize objective function while fulfilling the constraints.
The solvers used to find optimal points of the objective function are filled with information such as start point, objective function, linear equalities and linear inequalities.
Also, the non-linear constraints function is programmed in a separate m file.
The method’s calculations start at the first given point and stops when the error is within given presets and the minimum is reached.
Results:
Minimized function Value :
(Stopping time) = 2.07104seconds.
Dimensions of Inner & Outer diameters at which minimum occurs
Inner Diameter = 80mm
Outer Diameter = 110mm

Penalty Methods
The main purpose of including the penalty function to any function adds a penalty to the infeasibility.
Due to this addition of term prevents the solution to become infeasible.

Exterior Penalty function method
F(x1, x2, rp) = T(x1, x2) + rp*P(x); where
P(x) = ∑ max [0, gj(x1, x2)] ^2 + ∑ hk(x1, x2) ^2
rp penalty factor which from a range from 0.1 to 10,100, infinity; to get the feasible optimum.
The best optimum value is obtained when rp is very large.
If gj(x1, x2) > 0 then maximum value of [gj(x1, x2)] ^2 is considered.
if gj(x1, x2) < 0, then 0 is considered as the Maximum of [0, gj(x1, x2)] ^2.
∑ hk(x1, x2) ^2 = Equality constraints. In our problem. We do not have any equality constraints and

ResultsMinimum Stopping time : 2.071 seconds
Inner Diameter : 80 mm
Outer Diameter : 110mm
Click icon to add picture
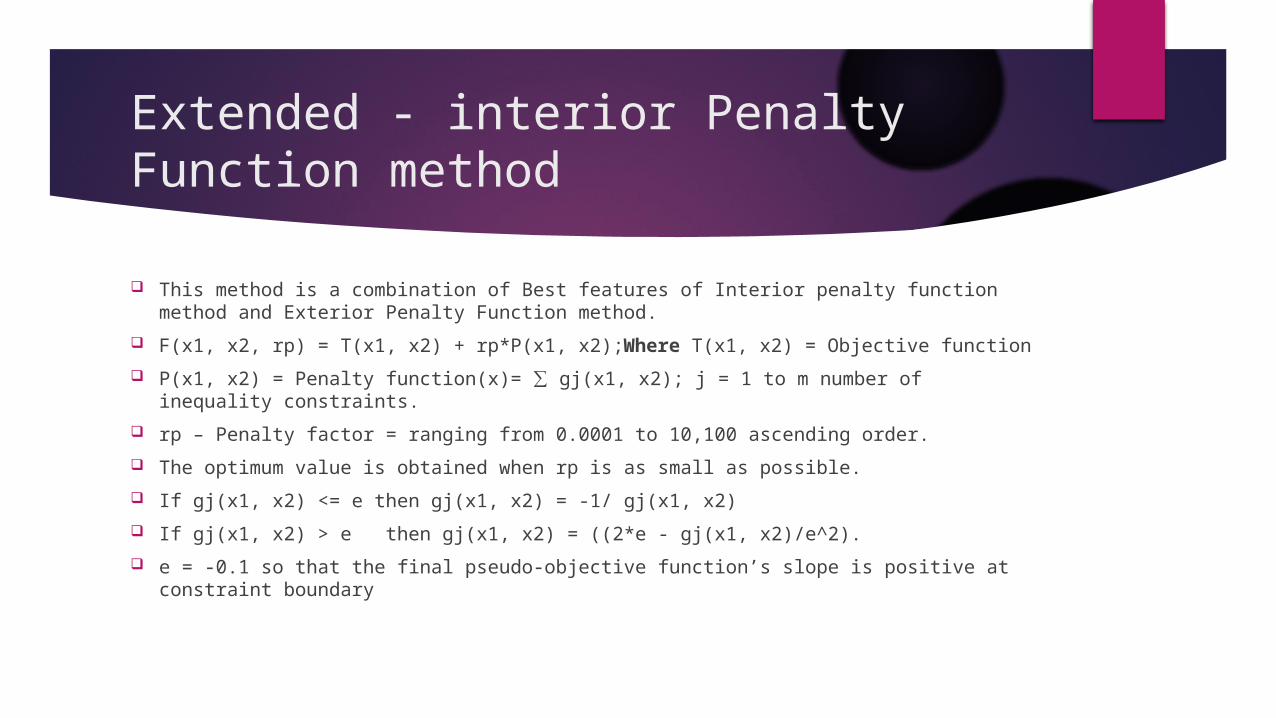
Extended - interior Penalty Function method
This method is a combination of Best features of Interior penalty function method and Exterior Penalty Function method.
F(x1, x2, rp) = T(x1, x2) + rp*P(x1, x2);Where T(x1, x2) = Objective function
P(x1, x2) = Penalty function(x)= ∑ gj(x1, x2); j = 1 to m number of inequality constraints.
rp – Penalty factor = ranging from 0.0001 to 10,100 ascending order.
The optimum value is obtained when rp is as small as possible.
If gj(x1, x2) <= e then gj(x1, x2) = -1/ gj(x1, x2)
If gj(x1, x2) > e then gj(x1, x2) = ((2*e - gj(x1, x2)/e^2).
e = -0.1 so that the final pseudo-objective function’s slope is positive at constraint boundary

Results:Minimum Stopping time : 2.071 seconds
Inner Diameter : 80mm
Outer Diameter : 110mm
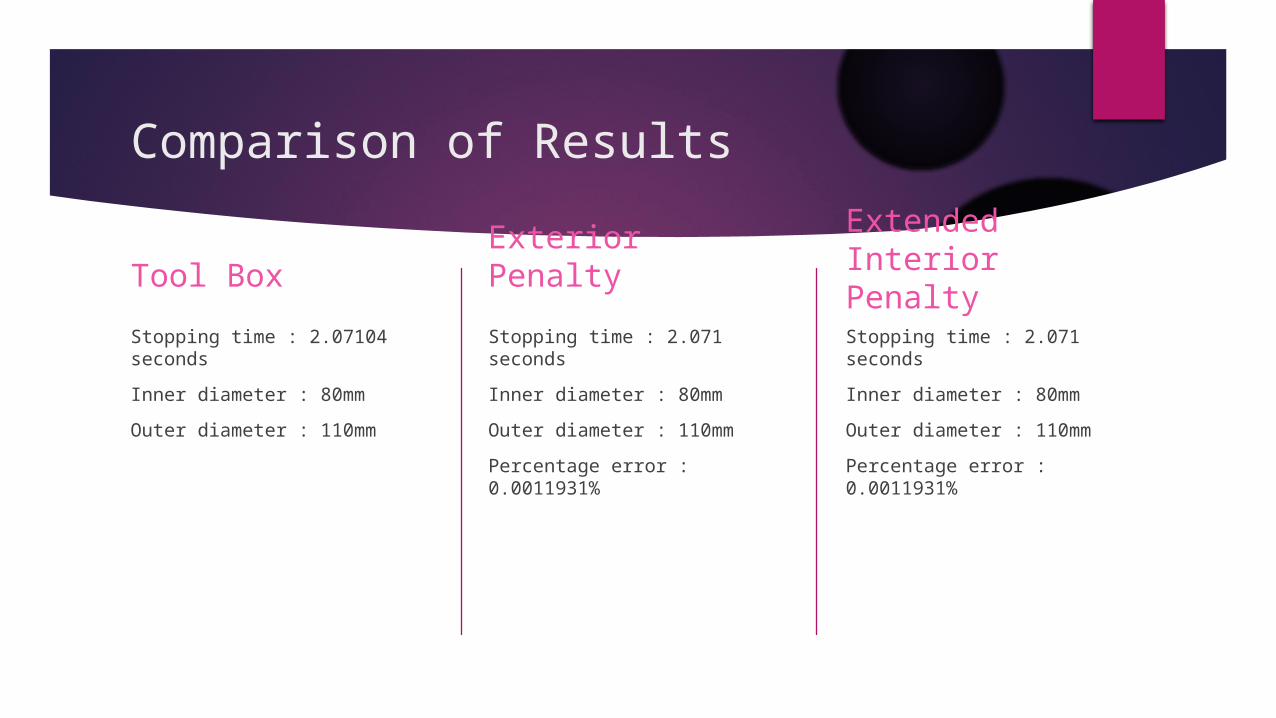
Comparison of Results
Tool Box
Stopping time : 2.07104 seconds
Inner diameter : 80mm
Outer diameter : 110mm
Exterior Penalty
Stopping time : 2.071 seconds
Inner diameter : 80mm
Outer diameter : 110mm
Percentage error : 0.0011931%
Extended Interior PenaltyStopping time : 2.071 seconds
Inner diameter : 80mm
Outer diameter : 110mm
Percentage error : 0.0011931%
Conclusion
Percentage error is minute which means our precision is acceptable.
All the methods arrive at the same final points. Consequently, the errors could be the results of calculation of difference in the approaching of the optimal point.
The best part is that the optimal solution point at which the minimized function value is obtained within the constraint is obtained at the vertex of the design space. So we can conclude that the solutions obtained are the feasible solution.
There are certain points which are worth mentioning. The increase in the no of frictional surfaces results in decrease in the stopping time.