cenidet miguel angel... · cycloconverters, computers, electronic ballasts, motor controllers,...
TRANSCRIPT

cenidet
Centro Nacional de Investigación y Desarrollo Tecnológico
Departamento de Ingeniería Electrónica
TESIS DE MAESTRÍA EN CIENCIAS
Evaluación de Alternativas de Control No Lineal para un Rectificador PWM Trifásico Elevador
Presentada por
Miguel Angel Alcántara Pérez
Como requisito para la obtención del grado de: Maestría en Ciencias en Ingeniería Electrónica
Director de tesis: Dr. Jaime Eugenio Arau Roffiel
Cuernavaca, Morelos, México. Abril de 2008

Dedicatoria
A Dios, por proporcionarme la fortaleza de afrontar todos los obstáculos en mi vida.
Por darme la sabiduría para elegir el camino correcto, por otorgarme una segunda
oportunidad para cumplir con todos mis objetivos personales y profesionales.
A mi madre Cecilia Alcántara Pérez, por darme la vida y apoyarme
incondicionalmente en todo momento, por ser padre y madre en esos momentos difíciles de
mi infancia, tus sabios consejos me han ayudado a ser una mejor persona cada día, te quiero
mucho.
A mis hermanos: Orlando López, Raziel Hernández y Alejandro Torres, por
impulsarme a seguir adelante en cada etapa de mi vida que compartí con ustedes, por
dejarme ser una parte importante en su evolución personal, gracias.
A mis amigos: Ernesto, Edgar, Julio, Orlando, Beto, Cholo, Pacheco y Nacho, por esos
buenos momentos que pasamos juntos.

Agradecimientos
A mi asesor, Dr. Jaime Arau Roffiel, por brindarme su confianza, amistad y ayuda en
el desarrollo de este proyecto de tesis.
A mis revisores, Dr. Jorge Hugo Calleja Gjumlich y Dr. Jesús Aguayo Alquicira, por
su amistad e invaluables comentarios.
A mis profesores: Dr. María Cotorogea, Dr. Carlos Aguilar Castillo, Dr Marco
Antonio Oliver Salazar, Dr. Mario Ponce Silva, M.C. José Martín Gómez, por compartir
sus experiencias y enseñanzas.
A mis compañeros de generación: Gisela Morales Amaro, Dana Luz González Ojeda,
Isaura Victoria Hernández Rodríguez, Maria Eusebia Guerrero Sánchez, Eder González
Toy, Omar Hernández González, Diego Balderrama Luna, Francisco Alegría; gracias por
brindarme su apoyo y amistad en aquellos momentos difíciles a lo largo de la maestría.
A las familias: Pérez García, Romero Alvarado y Olivares Zepahua, por el apoyo
moral y económico durante mi formación personal y profesional.
Al Departamento de Servicios Escolares de CENIDET, Lic. Olivia Maquinay Díaz,
Ana Maria Pérez Martínez, gracias a ustedes por mantenerse al pendiente de la salud y
bienestar económico de la familia CENIDET.
A todas aquellas personas que hicieron agradable mi estancia dentro y fuera del
CENIDET.
Al centro nacional de investigación y desarrollo tecnológico (CENIDET), por dejarme
ser parte de él y darme la oportunidad de crecer profesionalmente.
Al consejo nacional de ciencia y tecnología (CONACYT) y a la dirección general de
educación superior tecnológica (DGEST), por el apoyo económico que me permitió
concluir mis estudios.

Resumen
En la actualidad existen diversos procesos en los cuales se emplean cargas críticas,
como son: computadoras, equipo medico, aplicaciones militares, procesos de
automatización industrial y equipo de manejo de datos financieros, entre otras. Este tipo de
cargas necesita de una tensión y corriente de alimentación de alta calidad. La cual, es
afectada por diversas clases de perturbaciones como la distorsión armónica.
Los efectos severos que causa la distorsión armónica van desde el calentamiento de
componentes del sistema de distribución, oscilaciones mecánicas en generadores y motores,
incremento de ruido audible, defectos sobre el aislamiento, bajo desempeño de sistemas de
comunicación hasta el comportamiento impredecible de dispositivos de protección.
Los equipos electrónicos que tienen una etapa rectificadora tales como: hornos de
arco, cicloconvertidores, computadoras, balastros electrónicos, controladores de motores,
cargadores de baterías y controles de ángulo de disparo, son cargas no lineales que pueden
ser vistas como fuentes de armónicos de corriente.
Se han propuesto diversas estrategias de control para los rectificadores trifásicos; sin
embargo hasta ahora éstas basan su análisis y diseño de control en un sistema nominal. Si
existe algún cambio en los parámetros del sistema, la respuesta es diferente a la deseada,
dando a lugar a un sistema inestable, es decir un alto contenido armónico en las corrientes
de entrada del convertidor.
Cuando se presentan cambios en los parámetros del sistema, un control PID tiende a la
inestabilidad, por lo cual es necesario un controlador que tolere está variación paramétrica,
entre los cuales se encuentran los controles no lineales.

Abstract
At the present time diverse processes exist in which critical loads are used, like they
are computers, medical equipment, military applications, industrial automation processes
and financial data handling equipment, among others. This kind of loads needs high quality
supplies of tension and current. This is affected by various kids of disturbances as the
harmonic distortion.
The severe effects that it causes the harmonic distortion go from the heating of
components of the distribution system, mechanical oscillations in generators and motors,
increment of audible noise, defects on the isolation, under acting of communication systems
until imprecise the behavior of protection devices.
The electronics equipment that have a rectification stage as: arch ovens,
cycloconverters, computers, electronic ballasts, motor controllers, loaders of batteries and
controls of shot angle, are non lineal loads that can be seen as sources of harmonic of
current.
We have proposed various control strategies for three-phase rectifiers; however up to
now these base their analysis and control design on a nominal system. If some change
exists in the parameters of the system, the answer is different to the one wanted, giving to
place to an unstable system, that is to say a high harmonic content in the currents of
entrance of the converter.
When changes are presented in the parameters of the system, a control PID spreads to
the uncertainty, reason why it is necessary a controller that tolerates parametric variation is,
among which are the non lineal controls.

I
CONTENIDO
LISTA DE FIGURAS IV
LISTA DE TABLAS VI
LISTA DE SÍMBOLOS VII
CAPÍTULO 1
Introducción
1.1. Antecedentes 1
1.2. Planteamiento del Problema 4
1.3. Justificación 5
1.4. Objetivo 6
1.5. Metodología 7
1.6. Estado del Arte 8
1.6.1. Trabajos Realizados con Pasividad 8
1.6.2. Trabajos Realizados con Lógica Difusa 10
1.6.3. Trabajos Realizados con Modos Deslizantes 11
1.6.4. Conclusión del la Revisión del Estado del Arte 13
1.7. Contenido General de la Tesis. 14
CAPÍTULO 2
Técnicas de Control No Lineal
2.1. Pasividad 15
2.1.1. Propiedades de Pasividad 17
2.1.2. Ecuaciones Euler-Lagrange (E-L) 18
2.1.3. Relaciones Constitutivas para el Modelado de E-L 19
2.2. Modos Deslizantes 22
2.3. Lógica Difusa 24

II
CAPÍTULO 3
Rectificador PWM Trifásico Elevador
3.1. Modelo del rectificador con funciones de conmutación unipolar 27
3.2. Modelo del rectificador con funciones de conmutación bipolar 29
3.3. Modelo E-L en el Marco de Referencia a-b-c del Rectificador 33
3.4. Modelo E-L en el Marco de Referencia d-q del Rectificador 35
CAPÍTULO 4
Diseño de Controladores No Lineales para el Rectificador PWM Trifásico Elevador
4.1. Diseño del Control Pasivo 37
4.2. Diseño del Control por Modos Deslizantes 41
4.3. Diseño del Control Difuso 43
CAPÍTULO 5
Resultados en Simulación y Evaluación de los Controladores No Lineales
5.1. Simulación del Control Pasivo 49
5.2. Simulación del Control por Modos Deslizantes 51
5.3. Simulación del Controlador Difuso 54
5.4. Desempeño de los Controladores No Lineales 55
5.4.1. Seguimiento a una Corriente de Referencia Sinusoidal 55
5.4.2. Análisis de la respuesta transitoria del convertidor 59
CAPÍTULO 6
Conclusiones generales y trabajos futuros
6.1. Conclusiones generales 63
6.2. Trabajos Futuros 64

III
ANEXO A
Representación Matricial en el Marco de Referencia a-b-c y dq del Rectificador
Trifásico PWM Elevador
67
ANEXO B
Esquemas utilizados para generar las simulaciones de los controles no lineales 77
ANEXO C
Parámetros de Desempeño 84
BIBLIOGRAFIA 87

IV
Lista de Figuras
Figura 1.1. Corriente de entrada con armónicos de una fase para un rectificador trifásico
con carga resistiva.
2
Figura 1.2. Rectificador trifásico PWM reductor. 3
Figura 1.3. Rectificador trifásico PWM reductor-elevador. 3
Figura 1.4. Rectificador trifásico PWM elevador. 4
Figura 1.5. Sistema mínimo basado en DSP. 6
Figura 1.6. Tarjetas Dspace. 6
Figura 2.1. Relación constitutiva del inductor. 19
Figura 2.2. Relación constitutiva del capacitor. 20
Figura 2.3. Relación constitutiva de la resistencia. 21
Figura 2.4. Superficie de deslizamiento. 23
Figura 2.5. Sistema de control difuso. 25
Figura 2.6. Comparación entre los algoritmos de control clásico y difuso. 26
Figura 3.1. Rectificador PWM trifásico elevador con carga resistiva. 27
Figura 3.2. Rama del rectificador trifásico. 29
Figura 3.3. Circuitos equivalentes para el interruptor superior encendido. 30
Figura 3.4. Circuitos equivalentes para el interruptor inferior encendido. 30
Figura 3.5. Circuitos equivalentes para el caso en que ningún interruptor enciende. 30
Figura 4.1. Esquema de control pasivo para el rectificador PWM trifásico. 38
Figura 4.2. Diagrama a bloques del controlador de corriente pasivo. 40
Figura 4.3. Diagrama de fase para el control por corriente. 40
Figura 4.4. Esquema de control deslizante para el rectificador PWM trifásico. 41
Figura 4.5. Esquema de control deslizante para el rectificador PWM trifásico. 45
Figura 4.6. Función de membresía para o
v∆ . 46

V
Figura 4.7. Función de membresía para ( )o
v∆δ . 46
Figura 4.8. Función de membresía para n
I∆ . 48
Figura 5.1. Respuesta del sistema Trifásico. a) Tensión de salida. b) Tensión de la fase
“a”. c) Corriente de la fase “a”.
50
Figura 5.2. Sistema trifásico balanceado sin armónicos. a) Corrientes de fase abc.
b) Corrientes de fase en el Marco de Referencia dq.
50
Figura 5.3. Contenido armónico de la corriente de entrada de la fase “a” del sistema
pasivo.
51
Figura 5.4. Respuesta del sistema Deslizante. a) Tensión del bus de CD. b) Tensión de la
fase “a”. c) Corriente de la fase “a”.
52
Figura 5.5. Respuesta del sistema Deslizante. a) Corriente de la fase “a”. b) Corriente de
referencia.
52
Figura 5.6. Fenómeno oscilatorio (Chattering) del sistema Deslizante. a) Corriente de la
fase “a”. b) Corriente de referencia (Iref).
53
Figura 5.7. Contenido armónico de la corriente de entrada de la fase “a” del sistema
deslizante.
53
Figura 5.8. Respuesta del sistema Difuso. a) Tensión de salida. b) Tensión de la fase “a”.
c) Corriente de la fase “a”.
54
Figura 5.9. Contenido armónico de la corriente de entrada de la fase “a” del sistema
difuso.
54
Figura 5.10. Control Deslizante. a) Corriente de la fase “a”. b) Corriente de referencia Iref. 56
Figura 5.11. Señal de error generada entre la corriente de referencia Iref y la corriente de la
fase “a” del control deslizante.
56
Figura 5.12. Control Pasivo. a) Corriente de la fase “a”. b) Corriente de referencia Iref. 57
Figura 5.13. Señal de error generada entre la corriente de referencia Iref y la corriente de la
fase “a” en el control pasivo.
57
Figura 5.14. Control Difuso. a) Corriente de referencia Iref. b) Corriente de la fase “a”. 58
Figura 5.15. Señal de error generada entre la corriente de referencia Iref y la corriente de la
fase “a” en el control difuso.
58
Figura 5.16. Tiempo de subida Tr y Tiempo de establecimiento Ts para la tensión de salida
Vo del convertidor bajo el control pasivo.
60

VI
Figura 5.17. Tiempo de subida Tr , Tiempo de establecimiento Ts y Sobre impulso Mp para
la tensión de salida Vo del convertidor bajo el control deslizante.
60
Figura 5.18. Tiempo de subida Tr y Tiempo de establecimiento Ts para la tensión de salida
Vo del convertidor bajo el control difuso.
61
Figura A.1 Rectificador trifásico PWM elevador con carga resistiva. 67
Figura B.1 Sistema de control pasivo en Simulink. 77
Figura B.2 Modelado del rectificador para el control pasivo. 78
Figura B.3 Modelado del control pasivo en Simulink. 78
Figura B.4 Transformada dq-abc en Simulink. 79
Figura B.5 Transformada abc-dq en Simulink. 79
Figura B.6 PWM en Simulink. 79
Figura B.7 Sistema de control deslizante en Simulink. 80
Figura B.8 Modelado del rectificador para el control pasivo. 80
Figura B.9 Modelado del control deslizante con PWM. 81
Figura B.10 Sistema de control difuso en Simulink. 81
Figura B.11 Cálculo de los vectores de conmutación en Simulink. 82
Figura B.12 Modulador difuso 82
Figura B.13 Sistema de control pasivo en Psim. 83
Lista de Tablas
Tabla 3.1. Valores de Vgx para cada posible conmutación de los interruptores de una rama. 31
Tabla 3.2. Valores de Vgx para cada posible conmutación de los interruptores ideales de una
rama.
31
Tabla 4.1. Reglas difusas para n
I∆ . 47
Tabla 4.2. Identificación de Sextante. 48
Tabla 5.1. Parámetros de simulación del sistema. 49

VII
Tabla 5.2. Desempeño de los Controladores No Lineales. 59
Tabla 5.3. Desempeño de los controladores analizando su respuesta transitoria. 61
Lista de Símbolos Símbolos Utilizados en el Modelado del Convertidor
ea,eb,ec Tensiones de Fase
ia,ib,ic Corrientes de Fase
Van,Vbn,Vcn Tensiones de Fase a Neutro
L Inductor de Entrada
R Resistencia Asociada al Inductor de Entrada
e Matriz Columna de Tensiones de Fase
Si Matriz Columna de Corrientes de Fase
Vs Matriz Columna de Tensiones de Fase a Neutro
jp Funciones de Conmutación con j=a,b,c
jS ,
jS Interruptores del Convertidor
oV Tensión de Salida del Convertidor
K Matriz Constante
T
p Matriz Transpuesta de las Funciones de Conmutación
oi Corriente de Salida del Convertidor
Xi Corrientes de línea con X=a,b,c
Vsx Tensión en el Interruptor del Convertidor
Vd Tensión en el Diodo del Interruptor del Convertidor
L Función Lagraniana

VIII
D Componentes Resistivas en Lagrange
F Matriz Transpuesta de las Tensiones de Fase en Lagrange
V Co-energía del Convertidor en Lagrange
T Energía del Convertidor en Lagrange
Li Corriente en la Carga del Convertidor
COi Corriente en el Capacitor del Convertidor
LR Carga Resistiva del Convertidor
Cq Carga en el Capacitor
C Capacitor de salida del Convertidor
M Matriz diagonal definida positiva en Lagrange
R Matriz de disipación en Lagrange
J Matriz de interconexión con los interruptores en Lagrange
H Energía total en el Convertidor en Lagrange
w Matriz Transpuesta que contiene las Corrientes de Fase y Tensión de Salida
ω Frecuencia Angular
di ,
qi Corrientes en el Marco de Referencia d-q
Em Amplitud de la Señal de Fase
Vr Tensión de Referencia para el Control Pasivo
∆
= Se Define Como
•
qq,T
Función de Energía Cinética
( )qD Matriz Generalizada de Inercia
( )qV Función Potencial Para Limitar

IX
Q Fuerzas Externas En Euler-Lagrange
ζQ Señal Externa que Modela los Efectos de los Disturbios
Mu Matriz Completa Fila-Columna que Relaciona las Entradas Externas con las
Coordenadas Generalizadas
LV Tensión en el Inductor
λ Flujo
*T Co-energía
T ,U , G Energía
Ci Corriente en el Capacitor
*
jx Constantes de Equilibrio en Lazo Cerrado del control Pasivo con j=a,b,c
321 ,, aaa rrr Constantes de Amortiguamiento
oju Producto entre las funciones de conmutación y la Tensión de salida
),( tiSj
Superficie de Deslizamiento
refi Corriente de Referencia
)(ts Vector de conmutación del Control Difuso
ov∆ Tensión de Error.
( )o
v∆δ Desviación de la Tensión de Error.
'ns
Vector Normalizado de Conmutación
Ts Periodo de Prueba en Tiempo Discreto

X
Acrónimos Frecuentes
CD Corriente Directa
CA Corriente Alterna
PI Proporcional-Integral
PWM Modulación por Ancho de Pulso
FP Factor de Potencia
DSP Procesador de Señales Digitales
DTD Distorsión Total de Demanda
EC Error Cuadrático Medio
DAT Distorsión Armónica Total
Tr Tiempo de Subida
MP Sobre-impulso
Ts Tiempo de Establecimiento
PC Computadora
PID Proporcional-Integral-Derivativo
E-L Euler-Lagrange
PBC Control Basado en Pasividad
VSR Rectificador de Tensión
SVM Modulación por Espacio Vectorial
NB Negativo Grande
NM Medio Negativo
NS Negativo Pequeño
ZE Cero
PS Positivo Pequeño
PM Medio Positivo

XI
PB Positivo Pequeño
NMB Medio Negativo Grande
PMB Medio Positivo Pequeño
CLD Control Lógico Difuso
1
Capítulo 1
Introducción
En este capítulo se presenta la problemática que da origen a la necesidad de utilizar
sistemas de control no lineales, aplicados a un rectificador PWM trifásico del tipo elevador. Se
describen las motivaciones y objetivos de este trabajo de investigación.
Se presentan también el estado del arte en esta línea de investigación, y la organización
de este documento.
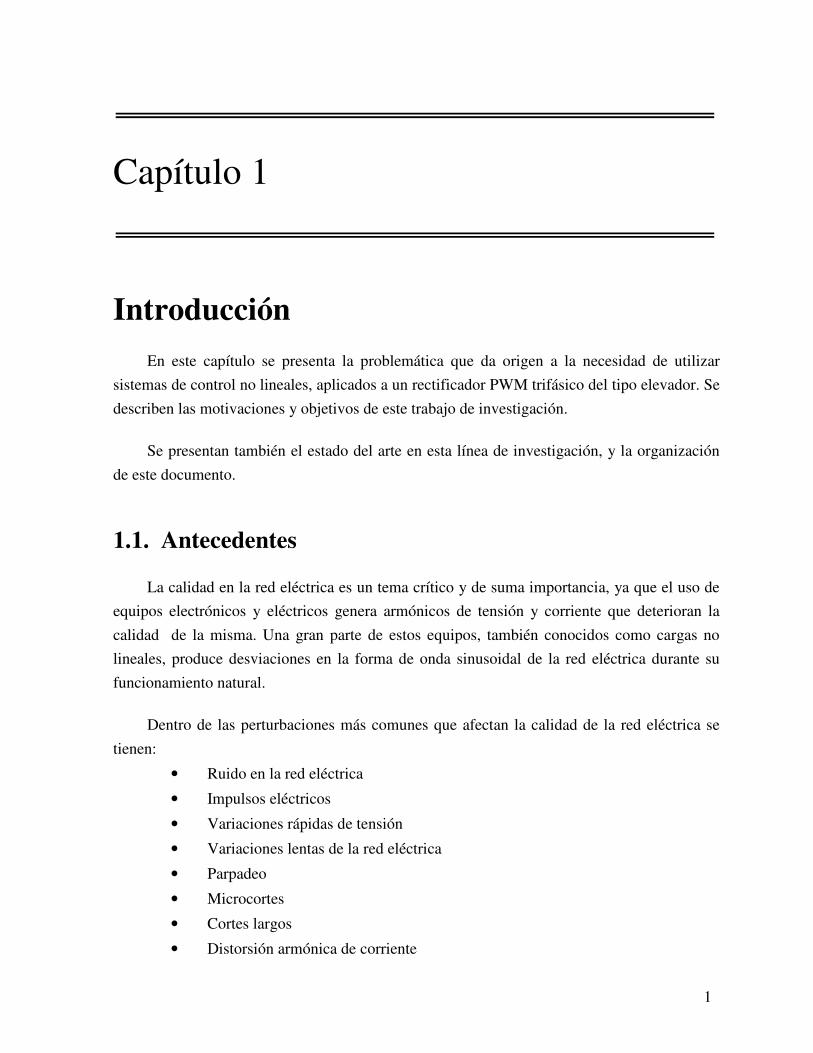
1.1. Antecedentes
La calidad en la red eléctrica es un tema crítico y de suma importancia, ya que el uso de
equipos electrónicos y eléctricos genera armónicos de tensión y corriente que deterioran la
calidad de la misma. Una gran parte de estos equipos, también conocidos como cargas no
lineales, produce desviaciones en la forma de onda sinusoidal de la red eléctrica durante su
funcionamiento natural.
Dentro de las perturbaciones más comunes que afectan la calidad de la red eléctrica se
tienen:
• Ruido en la red eléctrica
• Impulsos eléctricos
• Variaciones rápidas de tensión
• Variaciones lentas de la red eléctrica
• Parpadeo
• Microcortes
• Cortes largos
• Distorsión armónica de corriente

Introducción .
2
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045 0.05-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
TIEMPO (s)
CO
RR
IEN
TE
(A
)
De las perturbaciones en la red eléctrica mencionadas anteriormente, la distorsión
armónica de corriente es generada principalmente por rectificadores, fuentes conmutadas y
otras cargas no lineales. Esta distorsión armónica produce un bajo factor de potencia.
Una de las cargas típicas son los rectificadores de diodos, los cuales presentan un bajo
factor de potencia y corrientes de entrada con un gran contenido armónico, como se muestra
en la Figura 1.1, dando origen a perturbaciones en la red eléctrica que afecta a otros equipos
conectados a la red.
Figura 1.1. Corriente de entrada con armónicos de una fase para un rectificador trifásico con carga
resistiva.
Para atenuar los problemas asociados con la contaminación armónica se utilizan los
convertidores CA-CD llamados “Rectificadores Activos”. Este tipo de rectificadores utiliza la
técnica de modulación de ancho de pulso (PWM), y permiten obtener un factor de potencia
casi unitario. Las topologías más representativas de estos rectificadores son:
• Rectificador PWM elevador (BOOST).
• Rectificador PWM reductor (BUCK).
• Rectificador PWM reductor-elevador (BUCK-BOOST).
Introducción.
3
n
ea eb ec
L Ria
ibic
iL
icoSa Sb Sc
__Sa
__Sb
__Sc
Vo
+
-
g
a
b
c
R L
Lo
n
ea eb ec
L Ria
ibic
iL
icoSa Sb Sc
__Sa
__Sb
__Sc
Vo
+
-
g
a
b
c
R LLo
D
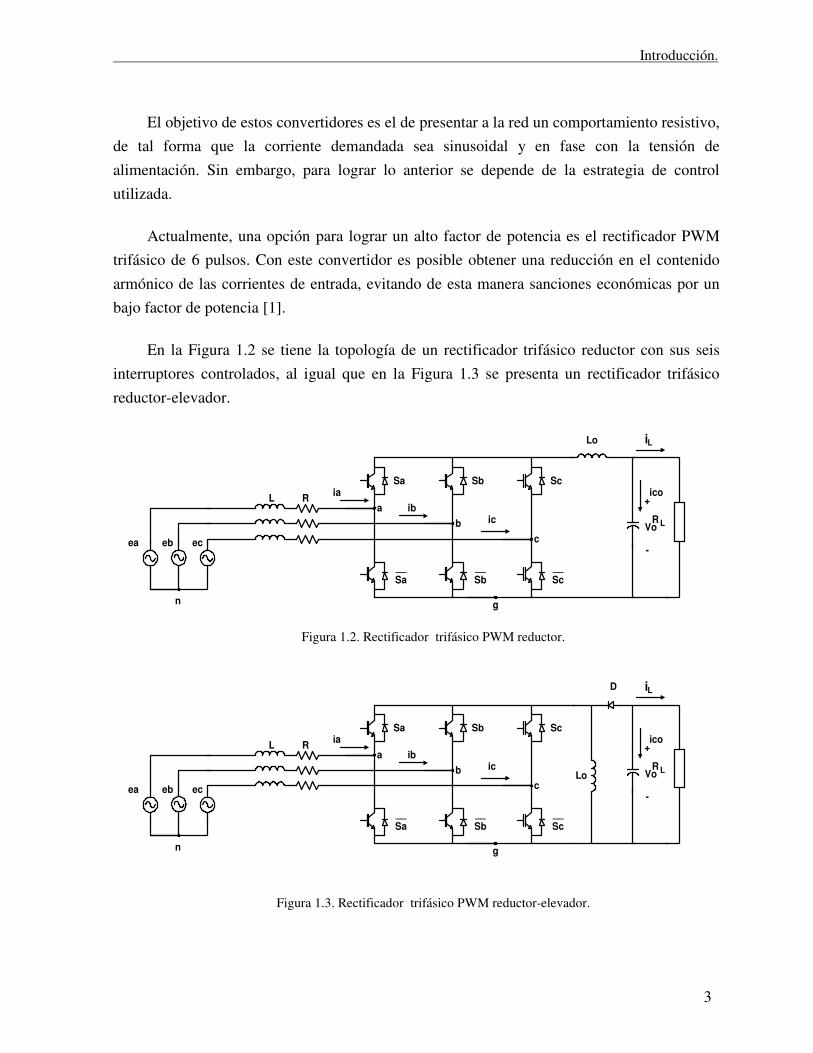
El objetivo de estos convertidores es el de presentar a la red un comportamiento resistivo,
de tal forma que la corriente demandada sea sinusoidal y en fase con la tensión de
alimentación. Sin embargo, para lograr lo anterior se depende de la estrategia de control
utilizada.
Actualmente, una opción para lograr un alto factor de potencia es el rectificador PWM
trifásico de 6 pulsos. Con este convertidor es posible obtener una reducción en el contenido
armónico de las corrientes de entrada, evitando de esta manera sanciones económicas por un
bajo factor de potencia [1].
En la Figura 1.2 se tiene la topología de un rectificador trifásico reductor con sus seis
interruptores controlados, al igual que en la Figura 1.3 se presenta un rectificador trifásico
reductor-elevador.
Figura 1.2. Rectificador trifásico PWM reductor.
Figura 1.3. Rectificador trifásico PWM reductor-elevador.

Introducción .
4
n
ea eb ec
L
L
L
R
R
R
ia
ib
ic
io i L
ico
Sa Sb Sc
__
Sa
__
Sb
__
Sc
Vo
+
-
g
a
b
c
RL
Para este trabajo de tesis se tomará como base el rectificador PWM elevador. La Figura
1.4 muestra el rectificador con sus seis interruptores controlados con una capacidad de
transferencia de energía bidireccional [2].
Figura 1.4. Rectificador trifásico PWM elevador.
Por lo general el control de los rectificadores mencionados anteriormente se logra por
medio de controladores PI, obteniéndose la regulación en las corrientes de entrada. La
desventaja de este tipo de controladores es que se diseñan para un punto específico de
operación ya que utilizan el modelo promedio del convertidor, con lo que se obtiene un
funcionamiento deficiente ante cambios en la operación del mismo; por ejemplo, cuando se
suministra energía a cargas como máquinas de lavado industrial, trituradoras, hornos de arco,
equipos de tracción y variadores de velocidad.
1.2. Planteamiento del Problema
La aplicación de los controladores PI en los rectificadores trifásicos presenta problemas
ante cambios en la carga y variación de los parámetros de los componentes pasivos, inductores
y capacitores, dando origen a problemas en el seguimiento de referencias y en la salida que
presentan, ya sea corriente o tensión.
Actualmente se estudia el uso de técnicas de control no lineales aplicadas a las diferentes
topologías de los rectificadores de potencia entre las que destacan [3]:
• Técnicas de control por modos deslizantes.
• Control difuso.
• Pasividad.

Introducción.
5
Este tipo de técnicas ayudan a obtener un alto desempeño en los rectificadores debido a
que se adaptan a las variaciones de operación que se pueden presentar en dicho convertidor; es
decir, a los diferentes puntos de operación que se pudieran tener durante su funcionamiento.
La aplicación de técnicas de control no lineal a los rectificadores de potencia se realiza
normalmente a través de sistemas basados en DSP o por medio de una PC que, a través de una
tarjeta de adquisición de datos, permite controlar al rectificador por medio de un programa
como Matlab [4].
En resumen, la problemática a abordar es explorar el uso de algunas técnicas no lineales
para el control del rectificador PWM trifásico del tipo elevador ante cambios en el punto de
operación del convertidor, consiguiendo al mismo tiempo los objetivos principales del mismo,
rectificación (bus de CD regulado) y factor de potencia unitario (corriente de entrada
sinusoidal y en fase con la tensión).
1.3. Justificación
Las técnicas de control no lineal mencionadas anteriormente tienen la ventaja de
adaptarse a los diferentes puntos de operación que pueda tener un rectificador trifásico
elevador, logrando un mejor desempeño, comparado con los esquemas de control PI.
Este trabajo de tesis se enfoca al estudio de técnicas de control no lineal aplicadas a un
rectificador trifásico elevador, el objetivo es lograr una mejora en las características de
respuesta ante variaciones de carga y robustez ante la variación de parámetros en los
componentes pasivos del rectificador
En la actualidad la aplicación de técnicas de control no lineal a convertidores de potencia
se realiza de una manera relativamente sencilla. Una alternativa es el uso de un sistema
mínimo basado en un DSP, como el mostrado en la Figura 1.5, en el cual es posible programar
el algoritmo de control no lineal, generando una respuesta muy rápida en la generación de
señales de control, limitada únicamente por la velocidad del DSP.

Introducción .
6
Figura 1.5. Sistema mínimo basado en DSP.
Otra posible opción consiste en la utilización de tarjetas de adquisición de datos, como
las mostradas en la Figura 1.6, las cuales constan de entradas y salidas, con lo que se puede
aprovechar el ambiente de trabajo de una PC utilizando programas como Matlab.
Figura 1.6. Tarjetas Dspace.
1.4. Objetivo
Si bien el control del PWM-VSR se logra generalmente por medio de controladores PI,
éstos presentan inestabilidad cuando se trata de suministrar energía a cargas altamente
contaminantes, como las mencionadas en la sección 1.1, con lo cual el control PI resulta
insuficiente ya que se presentan variaciones paramétricas en el convertidor.

Introducción.
7
Este trabajo de investigación tiene como objetivo general el estudio y evaluación de
alternativas de control no lineal para un rectificador PWM trifásico, con la finalidad de lograr
un factor de potencia unitario.
Como objetivos particulares se plantearon los siguientes:
• Realizar una revisión del estado del arte en la literatura especializada para conocer y
analizar las diferentes alternativas de control no lineal para un rectificador PWM
trifásico elevador.
• Estudiar y comparar los esquemas de control no lineal empleados en rectificadores
PWM trifásicos, para encontrar la técnica más adecuada para el convertidor en función
de los requerimientos.
• Proponer una alternativa de solución que satisfaga los requerimientos en cuanto a un
factor de potencia unitario para el convertidor propuesto.
1.5. Metodología
Para alcanzar los objetivos propuestos en este trabajo de investigación se desarrollaron
las siguientes actividades:
1.- Estudio de la operación del rectificador PWM trifásico elevador.
• Modelado del rectificador trifásico.
• Definición de los parámetros de operación del rectificador.
2.- Estudio de las técnicas de control no lineal aplicadas a convertidores de potencia.
• Pasividad.
• Modos Deslizantes.
• Difuso.
3.- Desarrollo del controlador pasivo.
• Estudio de la transformación dq aplicada a sistemas trifásicos.
• Estudio de las relaciones constitutivas para el modelado Euler-Lagrange de
componentes eléctricos.
• Extracción de las leyes de control pasivas.

Introducción .
8
4.- Desarrollo del controlador difuso.
• Elaboración de las reglas Difusas.
• Extracción de las leyes de control difusas.
5.- Desarrollo del controlador por modos deslizantes.
• Diseño de la superficie de deslizamiento.
• Extracción de las leyes de control deslizantes.
6.- Evaluación de resultados.
• Simulación de los tres controles no lineales.
• Comparativa por medio de índices de desempeño de los tres controles no lineales.
7.- Conclusión.
8.- Escritura de la tesis.
1.6. Estado del Arte
En la actualidad existen diferentes trabajos sobre las técnicas de control no lineal
aplicadas a convertidores, en las áreas de modos deslizantes, lógica difusa y pasividad, las
cuales, por sus características y desempeño, hacen atractiva su aplicación en el problema de la
contaminación de la red eléctrica. A continuación se mencionan los trabajos más
representativos de cada una de las técnicas de control no lineal que se han reportado en la
literatura.
1.6.1. Trabajos realizados con pasividad
La base principal del control basado en pasividad es el moldear
1 la energía del sistema e
inyectar el amortiguamiento requerido para lograr el objetivo del control. Este moldeo de
energía tiene como finalidad el tener un punto de equilibrio en un punto deseado;
generalmente este punto de equilibrio se encuentra cuando el error es igual a cero.
______________________________________________________ 1 Sinónimo de modelar, utilizado en la literatura especializada en pasividad.

Introducción.
9
En esta sección se presentan los trabajos de investigación más importantes del uso de
pasividad en convertidores de potencia.
• En [5] se presenta el diseño de un controlador basado en pasividad para un rectificador
síncrono trifásico. Este controlador incluye un control por modos deslizantes anidado
con la finalidad de tener una mejor acción de control sobre el rectificador, eliminando
así las componentes armónicas de las corrientes de entrada al convertidor.
• En [6] se presenta un controlador adaptable para un compensador síncrono de
distribución estático. Este controlador se basa en la técnica de pasividad para
compensar la potencia reactiva y la generación de armónicos.
• Un control PI basado en pasividad para convertidores de potencia, se presenta en [7].
El propósito de esta investigación es la de marcar las ventajas y desventajas ante el uso
de un control PI clásico y un control PI basado en pasividad en los convertidores de
potencia estudiados.
• En [8] se presenta el modelado por medio de ecuaciones Euler-Lagrange de un
rectificador de tres fases. El fin de este trabajo es el de obtener toda la representación
matemática del convertidor que sirve como base para elaborar el correspondiente
control pasivo.
• El diseño de un control pasivo para un convertidor elevador y un reductor-elevador se
presentan en [9]. En esta investigación se realiza el modelado de los convertidores
CD/CD, al igual que el diseño completo de cada control pasivo respectivamente, con la
finalidad de lograr la regulación de la tensión de salida.
• En [10] se presentan los resultados experimentales de un algoritmo de control basado
en pasividad aplicado al control de inversores de potencia. El objetivo de utilizar este
tipo de controlador en este trabajo es el de obtener un sistema que sea sencillo de
implementar de manera analógica. Además de obtener una tensión sinusoidal regulada
de salida, con una distorsión armónica total mínima.
• El diseño e implementación de dos controles, uno basado en histéresis y otro basado en
pasividad se muestran en [11]. Estas dos técnicas son aplicadas a un rectificador
monofásico, con la finalidad de mantener una regulación de la tensión de CD y el
seguimiento en la corriente de CA ante la presencia de variaciones rápidas de tensión.

Introducción .
10
• En [12] se muestra un control basado en pasividad por medio de balanceo de energía.
En este trabajo se muestra la metodología para lograr extender este control a sistemas
mecánicos.
• Un control basado en pasividad para un convertidor resonante se muestra en [13]. La
finalidad de este controlador no lineal es la de mantener una regulación en la tensión
de salida del convertidor.
1.6.2. Trabajos realizados con lógica difusa
El control difuso es utilizado normalmente en sistemas en los cuales es casi imposible
obtener su modelo matemático, esta técnica basa sus leyes de control en la experiencia del
operador de dicho sistema. En esta sección se presentan los trabajos más relevantes del uso de
esta técnica en convertidores.
• En la referencia [14] se presenta un controlador de corriente basado en lógica difusa
para un rectificador PWM. El objetivo de esta investigación es la de realizar una
comparación en la robustez ante disturbios y cambios en los parámetros de la carga,
entre un controlador basado en lógica difusa y un controlador PI clásico para un
rectificador PWM con un filtro LCL.
• Una nueva estrategia de control para un sistema rectificador trifásico con factor de
potencia unitario se presenta en [15]. En este trabajo se presentan dos esquemas de
control, uno basado en lógica difusa y otro que toma como base el control de espacios
vectoriales, con el objetivo de minimizar el alto contenido armónico en las corrientes
de entrada al convertidor.
• La implementación de un controlador para un rectificador trifásico basado en lógica
difusa se muestra en [16]. Este controlador se implementa por medio del
microcontrolador SH7047, que por medio de sensores de tensión, realiza la corrección
del factor de potencia y una reducción en la interferencia electromagnética.

Introducción.
11
• En [17] se presenta un método de control no lineal para un rectificador PWM trifásico.
Este método utiliza un control PI convencional en conjunto con un controlador difuso
anidado, con el objetivo de mantener estable el voltaje de salida del rectificador
trifásico.
• El diseño de un control difuso aplicado a un rectificador trifásico PWM se presenta en
[18]. El objetivo de este control es la de obtener un factor de potencia unitario, una
tensión de salida constante y corrientes de entradas sinusoidales, por medio de la
optimización del intercambio de energía entre el suministros de línea y el capacitor de
salida del convertidor.
• La implementación de un control difuso aplicado a un rectificador activo se muestra en
[19]. El objetivo de este control es la de obtener un factor de potencia unitario, una
tensión de salida constante, por medio de la incorporación de la modulación por
espacio vectorial.
• El diseño de un controlador para un rectificador trifásico basado en lógica difusa se
muestra en [20]. Este controlador se implementa por medio del microcontrolador
68HC16, incorporando el PWM vectorial.
• Un lazo de control de corriente difuso aplicado a un rectificador trifásico PWM se
presenta en [21]. El objetivo de este control es la de obtener un factor de potencia
unitario, una tensión de salida constante, por medio de un control difuso que se encarga
de proporcionar los tiempos de conmutación de los interruptores por medio deL PWM
vectorial.
1.6.3. Trabajos realizados con modos deslizantes
En esta sección se citan los trabajos más sobresalientes del uso del control deslizante en
sistemas de potencia, este control tiene como base el establecimiento de una superficie de
deslizamiento en la cual es desarrollada la acción de control.
Introducción .
12
• El diseño de un controlador basado en pasividad, para un rectificador síncrono trifásico
se presenta en [5]. Este controlador incluye un control por modos deslizantes anidado
con la finalidad de tener una mejor acción de control sobre el rectificador, eliminando
así las componentes armónicas de las corrientes de entrada al convertidor.
• Controlador lineal basado en modos deslizantes para un convertidor trifásico [22]. En
esta investigación se presenta un sistema de regulación de voltaje para convertidores,
utilizando un controlador PI y un controlador basado en la técnica de modos
deslizantes. Este trabajo realiza un análisis de la robustez ante perturbaciones, así como
un estudio de la respuesta en estado estable y en estado transitorio del regulador.
• La implementación de un control deslizante se muestra en [23]. En este trabajo se
describe un método eficiente de análisis y simulación de un controlador por modos
deslizante aplicado a un rectificador monofásico, al igual que su implementación en
Simulink.
• El control de velocidad de un motor por modos deslizantes se presenta en [24]. En este
documento de realiza una comparativa desde el punto de vista de robustez entre un
control PID, difuso y deslizante.
• En [25] se presenta una evaluación comparativa entre un control lineal, un control
deslizante, un difuso y un control deslizante-difuso. Dichos controladores son
aplicados a un convertidor elevador.
• Un control deslizante aplicado a un rectificador del tipo elevador se muestra en [26].
Este control tiene como objetivo principal el de obtener un factor de potencia unitario
por medio de un PWM. Es decir el control deslizante suministra los tiempos de
conmutación de los interruptores.
Introducción.
13
1.6.4. Conclusión de la revisión del estado del arte
De los trabajos de investigación mencionados anteriormente, se pueden concluir algunas
características de las técnicas de control no lineal, aplicadas a rectificadores trifásicos, que se
mencionan a continuación.
El control por modos deslizantes es una componente de la teoría de control de sistemas
no lineales y consiste en la utilización de acciones de control conmutadas o discontinuas a
través de superficies de deslizamiento, con lo cual se obtiene una invariabilidad respecto a las
incertidumbres y perturbaciones externas. Sin embargo, tiene la desventaja de presentar
oscilaciones de alta frecuencia en la señal de control.
Por su parte el control difuso se fundamenta en la teoría de conjunto, esto permite
convertir una estrategia de control lingüística, en una estrategia de control automático,
proporcionando una buena herramienta para el control de procesos donde es difícil obtener un
modelo matemático del sistema. Los sistemas difusos combinan la información de expertos
humanos (lenguaje natural) con mediciones físicas de las variables del sistema a través de
sensores para realizar la acción de control.
El control por medio de pasividad, presenta la ventaja de que se pueden seleccionar las
armónicas a compensar tanto de tensión como de corriente. Para obtener una mejor acción de
control se utilizan lazos anidados pasivos o en su defecto una combinación de pasividad con el
control por modos deslizantes, obteniéndose corrientes de entrada en los rectificadores con
bajo contenido armónico. El control por pasividad se ha hecho popular en el contexto de la
regulación de sistemas no lineales, debido a su simplicidad y robustez.
En resumen el control pasivo presenta mayor dificultad en el diseño que los otros dos
controles, pero de acuerdo a los trabajos revisados en el estado del arte, su implementación
tanto en simulación como de manera experimental es más sencilla, ya que la programación de
un control tanto difuso como deslizante es compleja.
Introducción .
14
1.7. Contenido general de la tesis
La estructura de este trabajo está compuesta por el capítulo 2, donde se da a conocer el
modelado del rectificador PWM trifásico elevador, tanto en el marco de referencia a-b-c
como en el dq.
En el capítulo 3 se mencionan algunos conceptos básicos referentes a las técnicas de
control no lineal aplicadas a convertidores CA/CD. El diseño del control pasivo, difuso y
deslizante se muestra en el capítulo 4,
Los resultados en simulación y una evaluación en base a índices de desempeño de los
controladores, son los temas que constituyen al capítulo 5. En el capítulo 6 se presentan las
conclusiones generales y trabajos futuros de este trabajo de tesis.

15
Capítulo 2
Técnicas de Control No Lineal
En este capítulo se presenta un estudio de cada una de las técnicas de control no lineal
más comunes aplicadas a convertidores de potencia, y se mencionan sus características
principales.
2.1. Pasividad
Pasividad es una propiedad que presenta la mayoría de los sistemas dinámicos. En
términos de energía, un sistema pasivo es aquel cuya energía total almacenada no es mayor
que la energía que se le suministra, y la diferencia entre estas es la energía disipada. Si la
energía total almacenada de un sistema se puede representar por una función de Lyapunov,
entonces se puede analizar la estabilidad del sistema.
La interpretación energética en que se basa la pasividad deja en claro su íntima relación
con las características físicas del sistema y, en particular, sus propiedades de estabilidad. El
control basado en pasividad de sistemas no lineales es un tema de constante investigación
debido a las ventajas relacionadas con la simplicidad del control resultante, su robustez y la
naturaleza física.
La estrategia de control basada en pasividad aprovecha el conocimiento de la dinámica
de sistemas para el diseño del controlador, así como para el análisis y síntesis de sistemas no
lineales. La dinámica de los sistemas se representa por medio de estructuras con una relación
física directa, estructuras derivadas de las ecuaciones de Hamilton y Euler-Lagrange.

Técnicas de Control No Lineal .
16
Por medio del control basado en pasividad se puede replantear el problema de
estabilización, como un problema de cómo volver al sistema pasivo en lazo cerrado. Si el
sistema en lazo cerrado es pasivo, el sistema es estable.
El método del control basado en pasividad tiene dos etapas principales:
• Moldeo de energía.
• Inyección de amortiguamiento.
En la primera etapa se moldea la función de energía de tal manera que la función de
energía en lazo cerrado tenga como mínimos a los puntos deseados. El sistema en lazo cerrado
se puede ver como un sistema no forzado que evoluciona de manera natural a los mínimos de
la nueva función de energía. El moldeo de energía se basa en las ecuaciones Euler-Lagrange,
las cuales se derivan de sistemas conservativos, por lo cual sus aplicaciones se limitan sobre
todo a sistemas eléctricos.
En la segunda etapa, con la inyección de amortiguamiento se incrementa la velocidad de
convergencia a los mínimos deseados; para esto se añaden elementos que incrementen la
disipación de energía.
Dentro de las técnicas para el moldeo de energía destaca el control basado en pasividad
(PBC) por balance de energía. Esta metodología supone que la función de energía a moldear
representa a la energía total del sistema, lo que origina que la función de energía en lazo
cerrado sea la diferencia entre la energía del sistema y la energía del controlador.
El controlador demanda o proporciona energía al sistema para mantenerlo en estado de
equilibrio. El objetivo del control basado en pasividad es el de moldear la energía del sistema
e inyectar el amortiguamiento requerido para lograr el objetivo de control.
El control por pasividad se aplica a sistemas que cumplan con la propiedad de balance de
energía; es decir, que la energía almacenada en el sistema, más la energía disipada es igual a la
suministrada.
Si la energía almacenada es menor o igual a la energía suministrada, entonces el sistema
es disipativo, si la energía suministrada es el producto entre la señal de entrada y la señal de
salida, el sistema es pasivo, con lo cual se tiene un punto de equilibrio en el sistema.

Técnicas de Control No Lineal
17
Por lo tanto, el control por pasividad se ha popularizado para regulación de sistemas no
lineales, debido a su simplicidad, robustez y clara interpretación física, desde el punto de vista
de la manipulación energética del sistema.
Para obtener una mejor acción de control se utilizan lazos anidados o en su defecto una
combinación de pasividad con el control por modos deslizantes.
2.1.1. Propiedades de Pasividad
Las características más importantes de la técnica de control pasiva se resumen en los
siguientes puntos:
• Balance de Energía.
• Si la energía almacenada es menor o igual a la energía suministrada, el sistema disipa
energía y se dice que es disipativo.
• La técnica de pasividad se basa en el moldeo de energía y la inyección de
amortiguamiento.
• El moldeo de energía modifica intencionalmente la energía potencial del sistema, de tal
forma que la nueva función de energía potencial tenga un mínimo global y único, en el
equilibrio deseado.
• La inyección de amortiguamiento modifica la función de disipación para asegurar la
estabilidad asintótica.
• Un sistema es disipativo si se cumple que la energía se disipa continuamente.
• El sistema es pasivo si es disipativo.
En resumen, el control basado en pasividad tiene como objetivo, que el moldeo de
energía logre hacer pasivo al sistema, empleando una función de almacenamiento constituida
por la suma de energía cinética original más la nueva energía potencial deseada, la inyección
de amortiguamiento conduce a adquirir la propiedad de salida estrictamente pasiva.

Técnicas de Control No Lineal .
18
2.1.2. Ecuaciones Euler-Lagrange (E-L)
Para sistemas puramente mecánicos y eléctricos, basta con la segunda ley de Newton y
las leyes de Kirchhoff respectivamente para encontrar las ecuaciones E-L deseadas. Sea un
sistema dinámico con coordenadas generalizadas q y fuerzas externas Q, la ecuación E-L que
describe al sistema es [27]:
Qqqq
qdt
d=
∂
∂−
∂
∂ ••
•,,
LL (2.1)
Donde la función de Lagrange se define como:
( )qqqqq V-TL
=
•∆•
,, (2.2)
Si
•
qq,T es la función de energía cinética, la cual tiene la forma:
( )•••
=
qqqqq
T
DT2
1, (2.3)
Donde ( )qD es la matriz generalizada de inercia y ( )qV es la función potencial que se
asume para ser limitada. Si se consideran tres tipos de fuerzas externas como lo son la acción
de control, disipación y la interacción del sistema con su medio ambiente, se tiene que en
Mu se encuentran las acciones de control.
En resumen se tiene que las fuerzas externas están definidas como:
MuF
++
∂
∂−=
•
• ζQq
q
Q (2.4)
Donde ζQ es una señal externa que modela los efectos de los disturbios. Ahora la
ecuación E-L toma la forma siguiente:
ζQq
q
qqq
qdt
d+=
∂
∂+
∂
∂−
∂
∂ •
•
••
•Mu
FLL,, (2.5)

Técnicas de Control No Lineal
19
La matriz M , es una matriz completa fila-columna que relaciona las entradas externas
con las coordenadas generalizadas. Reordenando e integrando la ecuación (2.5) de 0 a T, se
obtiene la ecuación de balance de energía:
( ) ( ) ( ) ( ) dsqds
q
q
qqqTqTqTT
Mu
F
HH ∫∫•
•
•
•••
=
∂
∂
+
−
00
0,0, (2.6)
Donde:
( ) ( ) ( ) ( )
−
••
0,0, qqTqTq HH = Energía almacenada.
ds
q
q
qT
∫ •
•
•
∂
∂
0
F
= Energía disipada. dqT
Mu∫•
0= Energía suministrada.
2.1.3. Relaciones Constitutivas para el Modelado de E-L
Para el modelado E-L, se expresa el comportamiento de los elementos del sistema en
términos de su energía. Las relaciones constitutivas permiten conocer la energía que se
encuentra en los elementos que participan en el circuito. En los circuitos eléctricos y
electrónicos, la coenergía en los elementos es el complemento de la energía que estos
almacenan. A continuación se muestran las relaciones constitutivas para un inductor, capacitor
y resistencia [28].
• Inductor
VLiL
+
-
i
λ
T*
T
T*= Coenergía
T= Energía
Figura 2.1. Relación constitutiva del inductor.

Técnicas de Control No Lineal .
20
El voltaje o esfuerzo que se encuentra en el inductor es:
dt
dV
L
λ= (2.7)
La energía que almacena este elemento puede conocerse de la relación constitutiva de la
Figura 2.1. Para conocer la coenergia *T se tiene que:
∫= diT λ* (2.8)
Si el inductor se considera como un elemento lineal, se tiene que L
Li=λ y LL
qi
•
= ; por
lo tanto, sustituyendo las igualdades en (2.8):
∫ ∫∫ ====2
*
2
L
LL
iLdiiLdiLidiT λ
2
2
1*
LqLT
•
= (2.9)
• Capacitor
iCVC
+
-
U*
U
V
q
Figura 2.2. Relación constitutiva del capacitor.
La corriente en el capacitor está definida por:
dt
dqi
C
C= (2.10)

Técnicas de Control No Lineal
21
La energía que almacena el capacitor se obtiene de la relación constitutiva de la Figura
2.2.
Calculando el área U :
∫= VdqU (2.11)
Si se considera al capacitor como un elemento lineal:
C
qV
C= (2.12)
Sustituyendo (2.12) en (2.11):
∫ ∫∫ === dqqC
dqC
qVdqU
C
C1
C
qU
C
2
2
1= (2.13)
• Resistencia
RiVR
G
G*
V
i Figura 2.3. Relación constitutiva de la resistencia.
La energía que disipa este elemento se puede encontrar de la relación mostrada en la
Figura 2.3, de la cual se observa que:
RR
RiV = (2.14)

Técnicas de Control No Lineal .
22
Si RR
qi
•
= , se calcula el área G por medio de:
∫ ∫∫ === diiRdiRiVdiGRR
2
2
1R
qRG
•
= (2.15)
Las relaciones constitutivas de (2.9), (2.13) y (2.15) se toman como base para el
modelado E-L del rectificador trifásico PWM elevador, como primer paso para el desarrollo
del controlador basado en pasividad.
2.2. Modos Deslizantes
La teoría de control por estructura variable se basa en el diseño de una ley de
conmutación aplicada a un conjunto de subsistemas continuos. Esta función de control
depende de los estados del sistema, de la referencia y de las perturbaciones presentes en el
sistema. Los regímenes deslizantes constituyen una forma particular del control por estructura
variable. Los controladores resultantes adquieren características de robustez frente a
variaciones paramétricas y perturbaciones externas, al tiempo que la dinámica de lazo cerrado
reduce su orden.
El diseño de un controlador por modos deslizantes consiste en establecer la dinámica de
la superficie de deslizamiento, la cual deberá ser estable y podría ser lineal.
Esta superficie es la encargada de regir el comportamiento del sistema cuando éste se
encuentre en el modo de deslizamiento. Posteriormente se diseña la ley de control, la cual
deberá de garantizar que las trayectorias de deslizamiento conduzcan hacia la superficie.
Cuando el sistema se encuentra en la superficie, cuya estructura y parámetros son
establecidos por el diseñador, la dinámica a lazo cerrado viene dada completamente por las
ecuaciones que la definen y es independiente de los parámetros del sistema, logrando una
excelente robustez ante disturbios.

Técnicas de Control No Lineal
23
MODO DEALCANZABILIDAD
SUPERFICIE DEDESLIZAMIENTO
MODO DEDESLIZAMIENTO
VALORFINAL
e(t)
e(t).
La interpretación gráfica del control por modos deslizantes se presenta en la Figura 2.4,
en la cual se puede observar que, partiendo de un punto inicial, la ley de control lo conduce
hacia la superficie de deslizamiento (modo de alcanzabilidad); posteriormente se desliza
atrapado por la superficie hasta el valor deseado (modo de deslizamiento).
Figura 2.4. Superficie de deslizamiento.
El deslizamiento sobre una superficie predeterminada es una característica fundamental
de los regímenes de deslizamiento.
Se basa en la suposición de un entorno ideal inexistente en aplicaciones prácticas. La
presencia de factores no considerados durante el diseño, origina un comportamiento
oscilatorio alrededor de la superficie de deslizamiento.
La causa de este fenómeno oscilatorio radica en implementaciones digitales, debido al
tiempo de programación, la dinámica de sensores y actuadores presentes en el sistema, que da
origen a una serie de inconvenientes como la inestabilidad del control, pérdidas por
calentamiento en dispositivos electrónicos de potencia y un alto desgaste de las partes
mecánicas móviles.
Técnicas de Control No Lineal .
24
En resumen, el control por modos deslizantes es una componente de la teoría de control
de sistemas no lineales y consiste en la utilización de acciones de control conmutadas o
discontinuas a través de superficies de deslizamiento, con lo cual se obtiene una invariabilidad
respecto a las incertidumbres y perturbaciones externas. Sin embargo, tiene la desventaja de
presentar oscilaciones de alta frecuencia en la señal de control.
2.3. Lógica Difusa
Esta técnica de control no lineal permite estructurar todo aquello que está separado por
fronteras mal definidas, modelando el comportamiento de fenómenos difíciles de predecir con
modelos matemáticos. El uso de esta técnica permite construir funciones lineales o no lineales
complejas y arbitrarias, basándose en términos y reglas que son intuitivas y entendibles.
Un controlador difuso está constituido por las siguientes etapas:
• Fusificación: Es el proceso de asignar o calcular un valor que represente un grado de
membresía.
• Evaluación de reglas: Esta etapa posee la capacidad de imitar la forma humana de
tomar decisiones basadas en conceptos difusos y de inferir acciones de control difusas,
tomando como base las reglas de inferencia de la lógica difusa.
• Defusificación: Se fundamenta en un conjunto de funciones de membresía definidas
sobre una variable de salida del controlador difuso, dando lugar a una respuesta o
conclusión difusa.
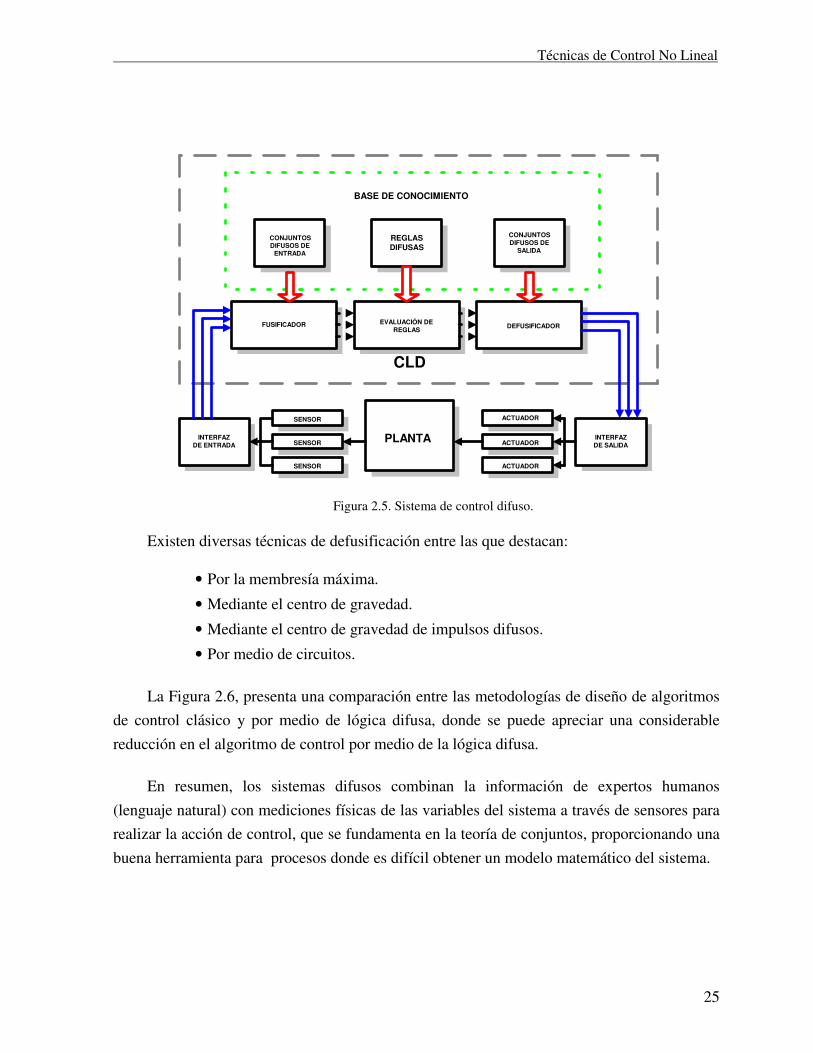
En la Figura 2.5 se presenta la configuración básica en lazo cerrado de un sistema de
control difuso. En la base del conocimiento se encuentran los conjuntos difusos definidos para
las entradas y salidas del sistema, además de las reglas difusas.
La fusificación se puede realizar por:
• Tablas de búsqueda.
• Funciones de membresía trapezoidales.
• Funciones matemáticas.
Técnicas de Control No Lineal
25
REGLAS
DIFUSAS
CONJUNTOS
DIFUSOS DE
SALIDA
CONJUNTOSDIFUSOS DE
ENTRADA
FUSIFICADOR EVALUACIÓN DE
REGLASDEFUSIFICADOR
BASE DE CONOCIMIENTO
CLD
PLANTA
ACTUADOR
ACTUADOR
ACTUADOR
SENSOR
SENSOR
SENSOR
INTERFAZ
DE SALIDA
INTERFAZ
DE ENTRADA
Figura 2.5. Sistema de control difuso.
Existen diversas técnicas de defusificación entre las que destacan:
• Por la membresía máxima.
• Mediante el centro de gravedad.
• Mediante el centro de gravedad de impulsos difusos.
• Por medio de circuitos.
La Figura 2.6, presenta una comparación entre las metodologías de diseño de algoritmos
de control clásico y por medio de lógica difusa, donde se puede apreciar una considerable
reducción en el algoritmo de control por medio de la lógica difusa.
En resumen, los sistemas difusos combinan la información de expertos humanos
(lenguaje natural) con mediciones físicas de las variables del sistema a través de sensores para
realizar la acción de control, que se fundamenta en la teoría de conjuntos, proporcionando una
buena herramienta para procesos donde es difícil obtener un modelo matemático del sistema.

Técnicas de Control No Lineal .
26
Entendimiento del sistema físico yde los requerimientos de control
Entendimiento del sistema fisico yde los requerimientos de control
Desarrollo de un modelo lineal de laplanta, sensores y actuadores
Determinar un controladorsimplificado, basado en la teoría
clásica de control
Desarrollo de un algoritmopara el controlador
Simular, depurar, e implementarel diseño
Diseño de un controlador usandoreglas difusas
Simular, depurar, e implementarel diseño
Figura 2.6. Comparación entre los algoritmos de control clásico y difuso.
Una desventaja del control pasivo y deslizante, es la necesidad de conocer el modelo
matemático del convertidor, para poder establecer la dinámica del sistema, en cambio en el
control difuso dicho modelo no es necesario. Otra característica de estos controladores es que
pueden ser utilizados en conjunto, es decir, de forma anidada para obtener el optimó
desempeño en la acción de control.
El diseño de controles no lineales se fundamenta en el conocimiento de la dinámica del
sistema a controlar. Resulta claro ver que las técnicas no lineales toman como base la
dinámica del sistema de diferente manera, es decir, para el caso pasivo es representada por
medio de estructuras derivadas de las ecuaciones E-L, en cambio en el control deslizante dicha
dinámica es representada por medio de una superficie de deslizamiento, y en la lógica difusa
está dada por la información obtenida del operador experto en conjunto con las mediciones
físicas de las variables del sistema por medio de sensores.

27
n
ea eb ec
L
L
L
R
R
R
ia
ib
ic
io i L
ico
Sa Sb Sc
__
Sa
__
Sb
__
Sc
Vo
+
-
g
a
b
c
RL
Capítulo 3
Rectificador PWM Trifásico Elevador
En este capítulo se presentan los modelos matemáticos del rectificador trifásico, tanto en
el marco de referencia a-b-c como en el d-q, los cuales se toman como base para establecer las
leyes de control, que darán origen a las señales de conmutación del convertidor.
3.1. Modelo del rectificador con funciones de conmutación
unipolar
Figura 3.1. Rectificador PWM trifásico elevador con carga resistiva.
Para el rectificador de la Figura 3.1 se consideran a todos los elementos lineales e
invariantes en el tiempo, los interruptores y fuentes de tensiones ideales así como un sistema
balanceado, con lo cual se tiene que las tensiones trifásicas de entrada se representan por el
siguiente sistema de ecuaciones.

Rectificador PWM Trifásico Elevador .
28
cnc
c
c
bnb
b
b
ana
a
a
VRidt
diL
VRidt
diL
VRidt
diL
e
e
e
++=
++=
++=
(3.1)
Expresando en forma matricial a (3.1):
+
+
=
cn
bn
an
c
b
a
c
b
a
c
b
a
V
V
V
Rdt
dL
i
i
i
i
i
i
e
e
e (3.2)
Por lo tanto las tensiones de entrada del convertidor se representan por la siguiente
ecuación:
VsiRdt
idLe
S
S ++= (3.3)
Si las funciones de conmutación unipolar se encuentran definidas como:
== cbajpara
AbiertoS
CerradoSp
j
j
j,,
,0
,1 (3.4)
Las tensiones de fase a neutro se definen como:
ocoboacn
ocoboabn
ocoboaan
VpVpVpV
VpVpVpV
VpVpVpV
3
2
3
1
3
1
3
1
3
2
3
1
3
1
3
1
3
2
+−−=
−+−=
−−=
(3.5)

Rectificador PWM Trifásico Elevador.
29
El sistema de ecuaciones de tensión de fase a neutro se expresa como:
pKVVso
3
1= (3.6)
Entonces 0i se puede representar de la siguiente manera:
S
T
oipi = (3.7)
Con (3.3), (3.6) y (3.7) se ha caracterizado el rectificador PWM trifásico elevador.
3.2. Modelo del rectificador con funciones de conmutación
bipolar
Tomando como base el modelado de la sección 3.1, se procede a encontrar las tensiones
de fase a neutro del convertidor, se analiza las conmutaciones de una de sus ramas como se
muestra en la Figura 3.2.
Sx
__Sx
ix
+
-
Vo
g . Figura 3.2. Rama del rectificador trifásico.
El análisis de la rama de la Figura 3.2 es el mismo para las otras dos ramas restantes del
convertidor.
Para el análisis de la conmutación de los interruptores de cada rama del rectificador se
consideran las corrientes de línea X
i correspondientes, así como el encendido del interruptor
superior, inferior y cuando ninguno de los dos se encuentra encendido.

Rectificador PWM Trifásico Elevador .
30
De lo anterior se originan los siguientes circuitos equivalentes mostrados en las Figuras
3.3, 3.4 y 3.5 respectivamente.
VSx
ix>0
+
-
Vo
+
-
Vgx
+
-
ixdc=ix
Vd
ix<0
+
-
Vo
-
+
Vgx
+
-
ixdc=ix
ix=0
+
-
Vo
Vgx
+
-
ixdc=ix
x= a,b,c
Figura 3.3. Circuitos equivalentes para el interruptor superior encendido.
ix>0
+
-
Vo
+
-Vgx
+
-
ixdc=0
Vd
ix<0
+
-
Vo
-
+Vgx
+
-
ixdc=0
ix=0
+
-
Vo
Vgx+
-
ixdc=0
x= a,b,cVSx
Figura 3.4. Circuitos equivalentes para el interruptor inferior encendido.
+
-
ix>0
+
-
Vo
Vgx
+
-
ixdc=0
Vd
Vd
ix<0
+
-
Vo
-
+
Vgx
+
-
ixdc=ix
Vo/2
ix=0
+
-
Vo
+
-
Vo/2
ixdc=0
+
-x= a,b,c
Figura 3.5. Circuitos equivalentes para el caso en que ningún interruptor enciende.

Rectificador PWM Trifásico Elevador.
31
Considerando los circuitos equivalentes anteriores, se obtiene los valores para la tensión
Vgx que se presentan en la Tabla 3.1.
Tabla 3.1. Valores de Vgx para cada posible conmutación de los interruptores de una rama.
Interruptor
superior
encendido
Interruptor
inferior
encendido
Ningún
interruptor
encendido
ix>0 Vgx=Vo-Vsx Vgx=-Vd Vgx=-Vd
ix<0 Vgx=Vo+Vd Vgx=Vsx Vgx=Vo+Vd
ix=0 Vgx=Vo Vgx=0 Vgx=Vo/2
Si los interruptores son ideales se pueden despreciar las caídas de tensión en los mismos
como se observa en la Tabla 3.2.
Tabla 3.2. Valores de Vgx para cada posible conmutación de los interruptores ideales de una rama.
Interruptor
superior
encendido
Interruptor
inferior
encendido
Ningún
interruptor
encendido
ix>0 Vgx=Vo Vgx=0 Vgx=0
ix<0 Vgx=Vo Vgx=0 Vgx=Vo
ix=0 Vgx=Vo Vgx=0 Vgx=Vo/2
De acuerdo a los valores mostrados en la Tabla 3.2, se plantea el siguiente sistema de
ecuaciones:
( )
( )
( )ocgc
obgb
oaga
VpV
VpV
VpV
+=
+=
+=
12
1
12
1
12
1
(3.8)

Rectificador PWM Trifásico Elevador .
32
Donde cba
ppp ,, representan las funciones de conmutación bipolar de cada interruptor
[29], [30] y [31], las cuales se definen como:
=
−
= cbajpara
CerradoS
CerradoSp
j
j
j,,
,1
,1 (3.9)
Si 0=++cnbnan
VVV , las tensiones de fase a neutro del convertidor se expresan como:
ocoboacn
ocoboabn
ocoboaan
VpVpVpV
VpVpVpV
VpVpVpV
3
1
6
1
6
1
6
1
3
1
6
1
6
1
6
1
3
1
+−−=
−+−=
−−=
(3.10)
Expresando al sistema (3.10) en forma matricial se tiene:
pKVVso
6
1= (3.11)
Si 0)( =++cba
iii , entonces 0i puede ser expresada como:
( )ccbbaao
ipipipi ++=2
1 (3.12)
Reescribiendo (3.12) se tiene:
S
T
oipi
2
1= (3.13)
Con (3.3), (3.11) y (3.13) se ha caracterizado el rectificador PWM trifásico elevador con
funciones de conmutaciones bipolar. Este modelo es el que se tomará como base para el
diseño de los controladores no lineales.

Rectificador PWM Trifásico Elevador.
33
3.3. Modelo Euler-Lagrange (E-L) en el Marco de
Referencia a-b-c del Rectificador
La ecuación E-L del convertidor de la Figura 3.1 se encuentra definida por [18]:
FDLL
=
∂
∂+
∂
∂−
∂
∂••
qdt
d (3.14)
La energía y coenergia del rectificador se encuentran definidas por (3.15) y (3.16)
respectivamente.
2
2
1C
qC
=V (3.15)
++=
••• 222
2
1LcLbLa
qqqLT (3.16)
En el término D , se incluyen las componentes resistivas del convertidor y se define
como:
2222
2
1
2
1
2
1
++−+
++=
•••••••
LccLbbLaaCLLcLbLaqpqpqpqRqqqRD (3.17)
Agrupando las fuentes de tensión en F:
[ ]T
cbaeee 0=F (3.18)
De la ecuación (3.14) se obtiene que:
FDVTT
=
∂
∂+
∂
∂+
∂
∂−
∂
∂••
qqq
qdt
d (3.19)

Rectificador PWM Trifásico Elevador .
34
De la Figura 3.1 se observa que COoLiii −= ,
L
o
L
R
Vi = y
Coq
CV
1= , además de
recombinar (3.18) con (3.19) se tiene que:
( ) 02
1
2
1
2
1
2
1
=+++−
=++
=++
=++
L
o
ccbbaa
cocc
c
bobb
b
aoaa
a
R
Vipipip
dt
dVoC
eVpRidt
diL
eVpRidt
diL
eVpRidt
diL
(3.20)
El sistema (3.20), muestra el modelo E-L del rectificador PWM en el marco de referencia
a- b- c. Este sistema de ecuaciones puede ser expresado en forma matricial como:
( ) FRwwuJwM =++•
(3.21)
Donde:
M= Matriz diagonal definida positiva.
R= Matriz de disipación.
J= Matriz de interconexión con los interruptores.
F= Vector de fuentes de tensión.
[ ]T
obVca iiiw =
El desarrollo matemático completo para la expresión (3.21) se presenta en el Anexo A.
La energía total del convertidor H esta dada por:
MwwVTH T
2
1=+= (3.22)
El modelo E-L de (3.20), contiene términos de entrada discontinuos debido a las
acciones de conmutación de los interruptores.

Rectificador PWM Trifásico Elevador.
35
3.4. Modelo E-L en el Marco de Referencia d-q del
Rectificador
El modelo E-L del rectificador en el marco de referencia a, b, c, es expresado en el marco
referencia d-q por medio de la matriz de transformación definida en [31]:
( ) ( )( ) ( )
°+°−
°+°−=
120120
120cos120coscos
tsentsentsen
tttT
ωωω
ωωω (3.23)
Aplicando la trasformada d-q a las ecuaciones (3.3), (3.7) y (3.13), se tiene el siguiente
sistema de ecuaciones:
EmVopRiLidt
diL
ddq
d =+++2
1ω
02
1=++−
qqd
q
VopRiLidt
diL ω (3.24)
( )qdo
pqipdii +=4
3
Planteando las siguientes igualdades:
Vox
ix
ix
q
d
=
=
=
3
2
1
dt
dVox
dt
dix
dt
dix
q
d
=
=
=
•
•
•
3
2
1
(3.25)
Sustituyendo (3.25) en el sistema de ecuaciones (3.24):
L
qd
q
d
R
xxpxpxC
pxRxLxxL
EmpxRxLxxL
3
213
3212
3121
3
2
2
1
2
1
3
2
02
1
2
1
+−−
=++−
=+++
•
•
•
ω
ω
(3.26)

Rectificador PWM Trifásico Elevador .
36
El sistema (3.26) muestra el modelo E-L del rectificador PWM en el marco de referencia
d-q. Este sistema de ecuaciones puede ser expresado en forma matricial como:
( )[ ] ε=+++•
xRxJJxM u21 (3.27)
El desarrollo matemático completo para la expresión (3.27) se presenta en el Anexo A.
La matriz J contiene las variables de conmutación del sistema. La energía total en el marco
de referencia d-q del sistema es:
xMxH T
2
1= (3.28)
La ecuación (3.28) se utiliza como función candidata de Lyapunov para el diseño del
control pasivo.
El objetivo de este modelado es lograr un factor de potencia unitario por medio de la
regulación a cero de ( )q
ix 2, además de lograr por medio de una tensión de referencia ( )Vr , la
regulación de la tensión de salida ( )o
Vx3 .
En resumen, los modelados presentados en este capítulo, se toman como base para el
diseño de los controles no lineales. El modelado en función de las variables de conmutación
bipolar, es usado tanto por el control deslizante como por el control difuso, para el
establecimiento de las leyes de control respectivas.
La representación del convertidor en el marco de referencia a,b,c, es la base del
modelado en el marco de referencia dq, que se utiliza por el control pasivo en la elaboración
de las leyes de control.

37
Capítulo 4
Diseño de Controladores No Lineales para
el Rectificador PWM Trifásico Elevador
En esta sección se aborda el diseño de los tres controles no lineales (Pasivo, Difuso y
Deslizante) aplicados al convertidor trifásico, que toman como base los modelados
presentados en el capítulo 3 para el establecimiento de las leyes de control correspondiente a
cada técnica. La implementación de los sistemas no lineales se muestran en el Anexo B.
4.1. Diseño del Control Pasivo
Los objetivos de obtener un factor de potencia unitario y un Bus de CD regulado, se
simplifican a un problema de regulación de un punto de operación, por medio del control
pasivo [32], [33].
El esquema de control pasivo para el rectificador PWM trifásico se muestra en la Figura
4.1. Para este control, la meta es lograr una tensión de salida estable, mediante la regulación
de las corrientes de línea de entrada. Dado un voltaje de CD, se fija una tensión Vr y por
medio de la regulación de la corriente de línea 1x se busca alcanzar un valor deseado del eje d,
a un valor •
1x , que corresponde al voltaje de referencia Vr .
El valor de corriente deseado •
1x debe predeterminarse como una solución de estado
estable del convertidor definido por (4.1), con la finalidad de alcanzar el valor de tensión de
salida deseado con un Vr fijo y un factor de potencia unitario [31], [33].

Diseño de Controladores No Lineales para el Rectificador PWM Trifásico Elevador .
38
n
ea eb ec
L Ria
ibic
io iL
icoSa Sb Sc
__
Sa
__
Sb
__
Sc
Vo
+
-
g
a
b
c
RL
ANGULO DE
REFERENCIA
abc/dq
id, iq
PBCud, uq
dq/abc
Pa, Pb, Pc
DRIVE
SPWM
CONTROLPI DE
VOLTAJE
Vr
Vo
X*1
X*2
ea ebec
Figura 4.1. Esquema de control pasivo para el rectificador PWM trifásico.
Por lo tanto de (3.26) se tiene el sistema de ecuaciones (4.1).
03
2
2
1
02
1
2
1
1
1
1
=+−
=+−
=+
∗
∗
∗
L
d
q
d
R
Vrxp
VrpLx
EmVrpRx
ω (4.1)
Si dd
pU = , qq
pU = y L
L
R
VrI = , entonces (4.1) se expresa como:
EmVrURxd
=+∗
2
11
02
11 =+− ∗
qVrULxω (4.2)
Ld
IxU3
2
2
11 =∗

Diseño de Controladores No Lineales para el Rectificador PWM Trifásico Elevador
39
Donde d
U , q
U y L
I , representan los valores de estado estable de las funciones de
conmutación d
p , q
p y la corriente de salida en la carga respectivamente.
De (4.2) se despejad
U , y reordenando el sistema se tiene que:
−=
∗
Vr
RxEmU
d
12 (4.3)
( )L
RR
Vrx
R
Emx
3
22
1
2
1 +− ∗∗ (4.4)
De (4.4), se obtiene la corriente de línea en estado de estable, la cual se muestra en (4.5).
−
±=∗
LRR
Vr
R
Em
R
Emx
3
8
2
1 22
1 (4.5)
La amplitud de la corriente se debe escoger lo más pequeña posible; es decir:
−
±==∗
L
X
RR
Vr
R
Em
R
EmIx
3
8
2
1 22
11 (4.6)
La meta de este diseño es lograr una regulación de ( )d
ix1 a ∗1x y ( )
qix2 a cero. Para
simplificar cálculos se hace 03 =ar , con lo que las leyes de control pasivo son:
( )[ ]EmxxRxx
u ad+−+−= ∗∗
∗ 1111
3
2r
[ ]221
3
2xLx
xu aq
r+= ∗
∗ω (4.7)
( )[ ] .2
3 3
1111
3
13
CR
xEmxxRx
Cx
xx
L
a
∗∗∗
∗
∗∗•
−+−+−= r

Diseño de Controladores No Lineales para el Rectificador PWM Trifásico Elevador .
40
xu
PBCCONVERTIDOR
CA/CD
x*1
x*2
1x x
2
ra1
ra2
El diagrama a bloques de controlador pasivo se observa en la Figura 4.2. La relación de
la conservación de la energía se obtiene de (4.7):
( )[ ]2
11
2
2
3 ∗∗ −= xREmxR
Vr
L
(4.8)
Figura 4.2. Diagrama a bloques del controlador de corriente pasivo.
Por lo tanto, se tiene que:
( )[ ]22
3
3
3
1Vrx
CxRx
L
−−= ∗
∗
∗•
(4.9)
Para comprobar la estabilidad se debe verificar el punto de equilibrio en el diagrama de
fase de la Figura 4.3, tomando como base (4.9).
X*3
d
dtX*3
Vr-Vr
Figura 4.3. Diagrama de fase para el control por corriente.

Diseño de Controladores No Lineales para el Rectificador PWM Trifásico Elevador
41
n
ea eb ec
L Ria
ibic
io iL
icoSa Sb Sc
__
Sa
__
Sb
__
Sc
Vo
+
-
g
a
b
c
RL
Pa, Pb, Pc
DRIVE
ia,ib,ic
CONTRODESLIZANTE
Y PWM
i ref-a
i ref-b
i ref-c
En la Figura 4.3, se puede observar que los dos puntos de equilibrio son estables. Por lo
tanto, este diseño logra un control del bus de CD al fijar un valor deseado de Vr con un factor
de potencia unitario.
4.2. Diseño del Control por Modos Deslizantes
Considerando el modelado del rectificador trifásico del capítulo 2, se procede al diseño
del control por modos deslizantes. El esquema de control deslizante para el rectificador PWM
trifásico se muestra en la Figura 4.4.
Figura 4.4. Esquema de control deslizante para el rectificador PWM trifásico.
La metodología de diseño se puede resumir en los siguientes puntos [23]:
• Se considera la corriente de línea j
i y la tensión del bus de CD como las variables de
estado.
• Se define la función de conmutación j
p , que representará los estados de los
interruptores:
=
−
= cbajpara
CerradoS
CerradoSp
j
j
j,,
,1
,1 (4.9)

Diseño de Controladores No Lineales para el Rectificador PWM Trifásico Elevador .
42
• Utilizando las leyes de Kirchhoff, el convertidor se representa por las siguientes
ecuaciones de estado:
( )
∑=
+−=
∈−+−=
3
1
11
,,1
j
jjo
ojjnj
j
ipC
iCdt
dVo
cbajuVL
iL
R
dt
di
(4.10)
Donde:
ocoboacn
jojocoboabn
ocoboaan
uuuV
VopuuuuV
uuuV
3
1
6
1
6
1
6
1
3
1
6
1
6
1
6
1
3
1
+−−=
=−+−=
−−=
(4.11)
Se obtienen las corrientes de entrada y la tensión del bus de CD del convertidor
integrando (4.10):
( )[ ]dtVVRiL
t
jnjjji ∫ −+−=0
1 (4.12)
dtipR
Vo
CVo
t
j
jj
L
∫ ∑
+−=
=0
3
1
1 (4.13)
• Con las ecuaciones (4.12) y (4.13), se puede construir el sistema en Matlab/Simulink.
• El último paso es establecer las leyes de control por modos deslizantes, esta
metodología se utiliza para controlar la variable de estado j
i , y dicha variable es
dependiente de la función de conmutación.
De lo anterior se tiene una superficie deslizante ),( tiSj
, capaz de cumplir con el objetivo
de control que es lograr que refj
ii = , con lo cual la superficie de deslizamiento queda
expresada como:
( ) ( ) 0, =−= iitiS jrefj
(4.14)

Diseño de Controladores No Lineales para el Rectificador PWM Trifásico Elevador
43
Considerando el criterio de estabilidad del modo deslizante y la ecuación (4.14), las leyes
del control deslizante son:
( )( ) 1
1
−=⇒∆>−
=⇒∆−<−
jjref
jjref
piK
piK
ii
ii (4.15)
El sistema de ecuación (4.15), define la función de conmutación para que refj
ii = , con
lo cual se pretenda que j
i sea una onda sinusoidal en fase con la tensión de entrada
correspondiente. La variable K, se utiliza para ajustar la frecuencia de conmutación. Con las
ecuaciones (4.12), (4.13) y (4.15), es posible implementar en Simulink el sistema de control
completo.
4.3. Diseño del Control Difuso
Como primer paso de diseño, las ecuaciones que describen el comportamiento del
convertidor del capítulo 2, se escriben en el marco de referencia αβ , utilizando los siguientes
vectores:
( ) ( ) ( ) ( )( )
( ) ( ) ( ) ( )( )
( ) ( ) ( ) ( )( )tstststs
titititi
tetetete
cba
cba
cba
2
2
2
3
2
3
2
3
2
αα
αα
αα
++=
++=
++=
(4.16)
Donde:
π
α 3
2j
e=
=)(te Vector espacial de tensiones.
=)(ti Vector espacial de las corrientes de entrada.
=)(ts Vector de conmutaciones.

Diseño de Controladores No Lineales para el Rectificador PWM Trifásico Elevador .
44
Asumiendo que las tensiones de fase son sinusoidales, el vector espacial correspondiente
se escribe como:
tj
Eeteω=)( (4.17)
Como las corrientes de entrada se desean sinusoidales y en fase con la tensión, el vector
de corrientes de entrada se expresa como:
tj
Ietiω=
∗)( (4.18)
Para obtener un factor de potencia unitario y corrientes totalmente sinusoidales, el vector
de conmutación espacial se puede expresar como:
( )
−=
dt
tidLte
tVots
)()(
2)( (4.19)
El control de corriente realimentado puede ser logrado escogiendo )(ts como una
función del vector de las corrientes deseadas )(ti∗
:
( )
−=
∗
dt
tidLte
tVots
)()(
2)( (4.20)
El esquema de control difuso para el rectificador PWM trifásico se muestra en la Figura
4.5. El siguiente paso para el diseño del control, consiste en la discretización del sistema se
define a nTstn
= como el tiempo discreto donde Ts es el periodo de prueba seleccionado, con
lo cual se obtiene:
( )snn
n
n
tj
nn
tj
nn
tj
n
eSs
eIi
Eee
ϕω
ω
ω
+=
=
=
(4.21)
El propósito del control difuso PWM es el calcular la variación de la corriente de
referencia necesaria para el control de tensión, y posteriormente calcular el ciclo de trabajo de
los vectores de conmutación discretos [18].

Diseño de Controladores No Lineales para el Rectificador PWM Trifásico Elevador
45
n
ea eb ec
L Ria
ibic
io iL
icoSa Sb Sc
__
Sa
__
Sb
__
Sc
Vo
+
-
g
a
b
c
RL
MODULADOR
DIFUSO
DRIVE
CONTROL DIFUSO PARA
EL BUS DE CD
PWM
IDENTIFICADOR DESEXTANTE Y BLOQUE DE
TRANSFORMACION
eab
ebc
v*o
ov
Sab,n
bc,nS
ca,nS
ov∆
( )o
v∆δ
nI∆
Figura 4.5. Esquema de control difuso para el rectificador PWM trifásico.
El vector de conmutación se calcula para imponer la variación de la corriente de
referencia i∆ necesaria para la regulación del bus de CD; el vector de conmutación puede ser
expresado en el marco de referencia dq como:
( )( )1
,
,
,
,
2
2
−−=
∆−=
n
no
qn
n
no
dn
LIv
s
ITs
LE
vs
ω
(4.22)
Las componentes del vector de conmutación dependen de la magnitud y variación de la
corriente n
I∆ , la variación del vector de corriente se calcula definiendo a la tensión de error
ov∆ del bus de CD y a su desviación ( )
ov∆δ como:
( )
nno
no
VoVov
VoVov
−=∆
−=∆
−
∗
1δ (4.23)

Diseño de Controladores No Lineales para el Rectificador PWM Trifásico Elevador .
46
La tensión de error se minimiza aumentando o disminuyendo la referencia de la magnitud
del vector de corriente n
I∆ . La estrategia de control difuso se deriva de acuerdo a los
siguientes argumentos [21]:
• Si o
v∆ y ( )o
v∆δ son muy negativos, la tensión de salida es más grande que su
referencia, además su amplitud está creciendo, la magnitud actual debe disminuirse.
• Cuando o
v∆ es muy negativo y ( )o
v∆δ es muy positivo, la tensión de salida todavía es
mayor que su referencia, pero su amplitud está decreciendo, la variación de la corriente
nI∆ debe tomar el valor de cero.
• Para valores pequeños de o
v∆ , las variaciones demasiado grandes de n
I∆
generalmente llevan a la oscilación.
De lo anterior se escogen como variables difusas a o
v∆ y ( )o
v∆δ , definidas por las
funciones de membresía que se muestran en la Figura 4.6 y 4.7, y n
I∆ como una salida difusa,
cuya función de membresía se muestra en la Figura 4.8.
Figura 4.6. Función de membresía para o
v∆ .
Figura 4.7. Función de membresía para ( )o
v∆δ .

Diseño de Controladores No Lineales para el Rectificador PWM Trifásico Elevador
47
Figura 4.8. Función de membresía para n
I∆ .
En la Tabla 4.1, se muestran las reglas difusas para n
I∆ . El siguiente paso es la de
seleccionar el vector espacial para la modulación SVM; es decir, el vector de conmutación
( ns ) se encuentra en algún sextante por medio de las componentes compuestas del vector
normalizado:
n
n
n
s
ss =
'
( ) ( )πϕπϕϕ 34cos32cos)cos( '
,
'
,
'
, −=−==nncnnbnna
sss (4.24)
Como se muestra en la Tabla 4.2, los sectores de ns se determinan usando los signos de
las cantidades siguientes:
( )
−=
−−==
−=
+=
−−=
3
23
33
3
43
6cos3
33
,
,
,
πϕ
πϕϕ
πϕ
πϕ
πϕ
nnca
nnnbc
nnnnab
senS
sensenS
sensenS
(4.25)
Tabla 4.1. Reglas difusas para n
I∆ .
ov∆
( )o
v∆δ
NB NM NS ZE PS PM PB
NB NB NM NM NM NS NS ZE
NM NMB NM NM NS NS ZE PS
NS NM NS NS NS ZE PS PS
ZE NM NS NS ZE PS PS PM
PS NS ZE ZE PS PS PM PM
PM NS PS PS PS PS PM PMB
PB ZE PS PS PM PM PMB PB

Diseño de Controladores No Lineales para el Rectificador PWM Trifásico Elevador .
48
Tabla 4.2. Identificación de Sextante.
Sextante nab
S , nbc
S , nca
S ,
0°< φn <60° + + -
60°< φn <120° - + -
120°< φn <180° - + +
180°< φn <240° - - +
240°< φn <300° + - +
300°< φn <360° + - -
Dependiendo del sector del vector de conmutación, se escogen dos vectores adyacentes
para su descomposición; es decir, se ubica el sector en que se encuentra, y los dos vectores
adyacentes que lo delimitan. Estos dos vectores se ponderan según el periodo de muestreo Ts
para producir la tensión deseada.
El tiempo en que se aplican tanto el primero como el segundo vector base durante un
periodo de muestreo, se determina con las siguientes ecuaciones:
( )
6...13
1
2
3
32
3
1 =
+−=
−=
+ KK
sensTT
KsensTT
nnSK
nnSK
πϕ
ϕπ
(4.26)
Con (4.26) ya se tienen los parámetros necesarios para establecer las reglas difusas para
los ciclos de trabajo correspondientes a cada interruptor, con la finalidad de que las corrientes
de entrada tengan una distorsión armónica mínima. Así se tiene ya diseñado el sistema de
control difuso completo.
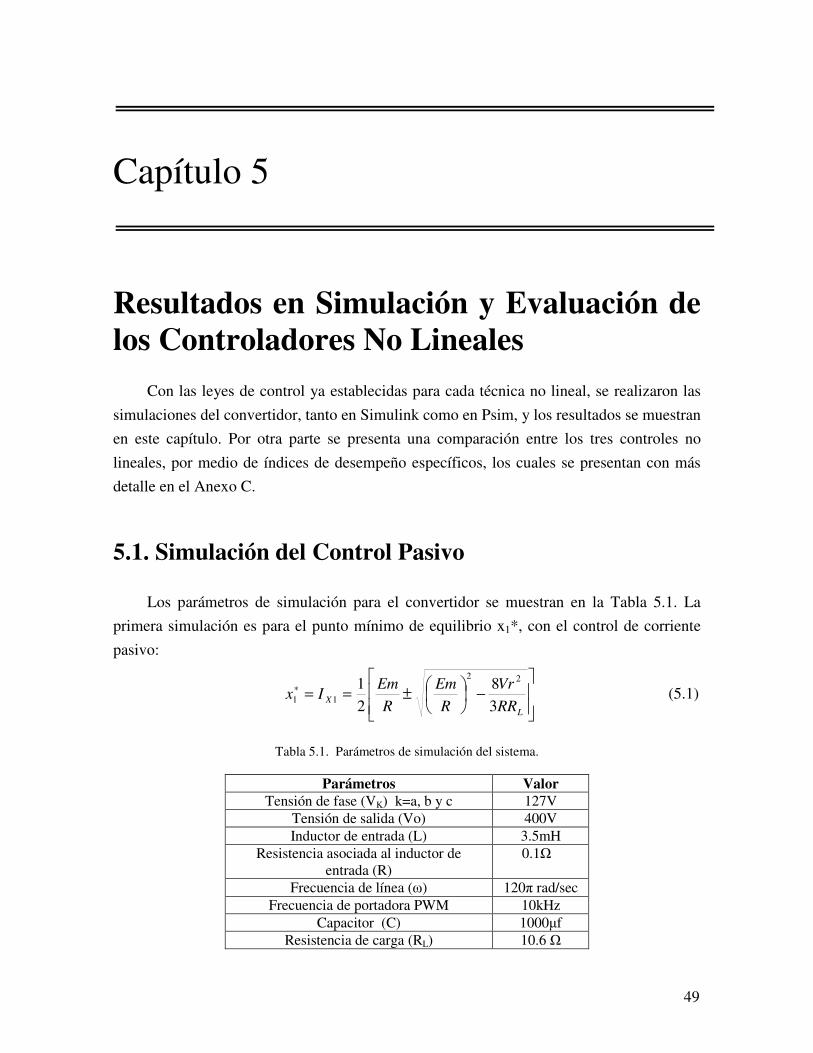
49
Capítulo 5
Resultados en Simulación y Evaluación de
los Controladores No Lineales
Con las leyes de control ya establecidas para cada técnica no lineal, se realizaron las
simulaciones del convertidor, tanto en Simulink como en Psim, y los resultados se muestran
en este capítulo. Por otra parte se presenta una comparación entre los tres controles no
lineales, por medio de índices de desempeño específicos, los cuales se presentan con más
detalle en el Anexo C.
5.1. Simulación del Control Pasivo
Los parámetros de simulación para el convertidor se muestran en la Tabla 5.1. La
primera simulación es para el punto mínimo de equilibrio x1*, con el control de corriente
pasivo:
−
±==∗
L
X
RR
Vr
R
Em
R
EmIx
3
8
2
1 22
11 (5.1)
Tabla 5.1. Parámetros de simulación del sistema.
Parámetros Valor
Tensión de fase (VK) k=a, b y c 127V
Tensión de salida (Vo) 400V
Inductor de entrada (L) 3.5mH
Resistencia asociada al inductor de
entrada (R)
0.1Ω
Frecuencia de línea (ω) 120π rad/sec
Frecuencia de portadora PWM 10kHz
Capacitor (C) 1000µf
Resistencia de carga (RL) 10.6 Ω

Resultados en Simulación y Evaluación de los Controladores No Lineales .
50
Figura 5.1. Respuesta del sistema Trifásico. a) Tensión de salida. b) Tensión de la fase “a”.
c) Corriente de la fase “a”.
Figura 5.2. Sistema trifásico balanceado sin armónicos. a) Corrientes de fase abc.
b) Corrientes de fase en el marco de referencia dq.
Como se puede observar en la Figura 5.1, la tensión y corriente de entrada están en
fase, manteniendo un comportamiento resistivo del convertidor hacia la red eléctrica, así
como un bus de CD constante.
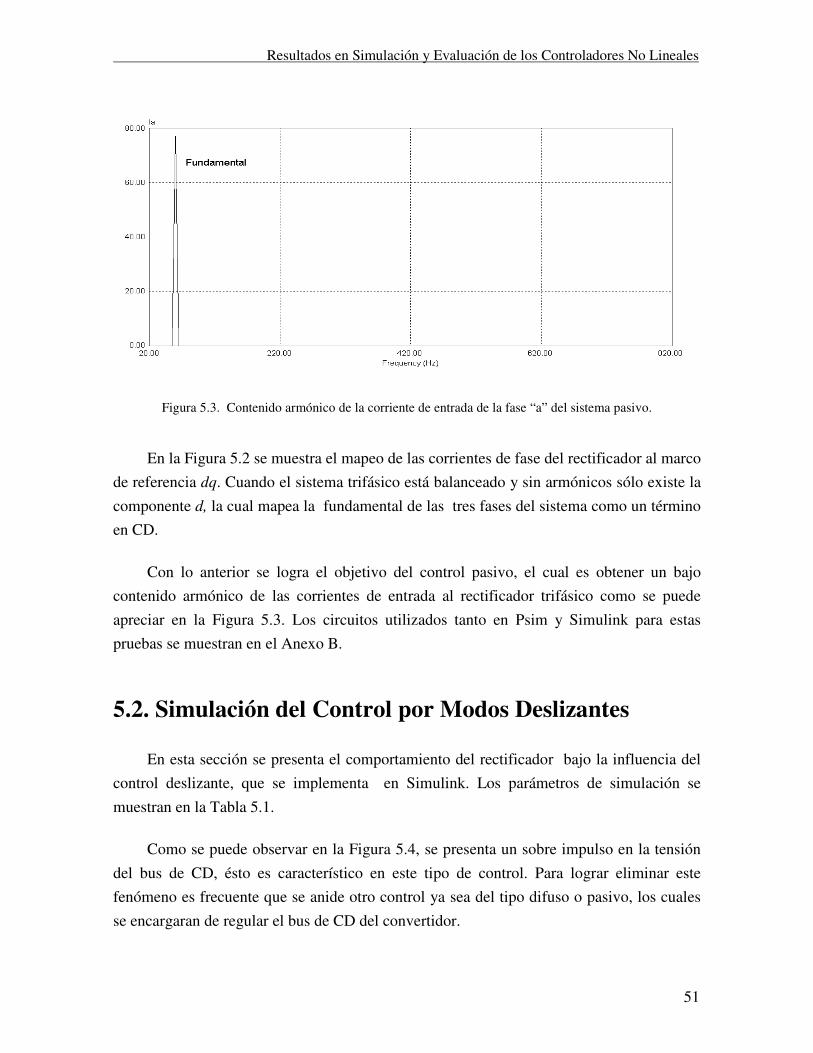
Resultados en Simulación y Evaluación de los Controladores No Lineales
51
Figura 5.3. Contenido armónico de la corriente de entrada de la fase “a” del sistema pasivo.
En la Figura 5.2 se muestra el mapeo de las corrientes de fase del rectificador al marco
de referencia dq. Cuando el sistema trifásico está balanceado y sin armónicos sólo existe la
componente d, la cual mapea la fundamental de las tres fases del sistema como un término
en CD.
Con lo anterior se logra el objetivo del control pasivo, el cual es obtener un bajo
contenido armónico de las corrientes de entrada al rectificador trifásico como se puede
apreciar en la Figura 5.3. Los circuitos utilizados tanto en Psim y Simulink para estas
pruebas se muestran en el Anexo B.
5.2. Simulación del Control por Modos Deslizantes
En esta sección se presenta el comportamiento del rectificador bajo la influencia del
control deslizante, que se implementa en Simulink. Los parámetros de simulación se
muestran en la Tabla 5.1.
Como se puede observar en la Figura 5.4, se presenta un sobre impulso en la tensión
del bus de CD, ésto es característico en este tipo de control. Para lograr eliminar este
fenómeno es frecuente que se anide otro control ya sea del tipo difuso o pasivo, los cuales
se encargaran de regular el bus de CD del convertidor.

Resultados en Simulación y Evaluación de los Controladores No Lineales .
52
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1-200
-100
0
100
200
300
400
500
tiempo(sec)
Am
plit
ud
a)
b)
c)
0 100 200 300 400 500 600 700 8000
10
20
30
40
50
60
FRECUENCIA (Hz)
Ia (A)
Figura 5.4. Respuesta del sistema Deslizante. a) Tensión del bus de CD. b) Tensión de la fase “a”.
c) Corriente de la fase “a”.
Figura 5.5. Contenido armónico de la corriente de entrada de la fase “a” del sistema deslizante.
El comportamiento resistivo hacia la red eléctrica se mantiene ya que la tensión y
corriente de entrada están en fase, como se muestra en la Figura 5.4, al mismo tiempo se
logran corrientes sinusoidales con bajo contenido armónico como se observa en la Figura
5.5.
En la Figura 5.6 se puede apreciar la superficie de deslizamiento propuesta (Iref), en
donde el punto inicial es la corriente de la fase “a”, que es atrapado en la superficie
deslizable debido a las leyes de control establecidas anteriormente (Modo de
alcanzabilidad).

Resultados en Simulación y Evaluación de los Controladores No Lineales
53
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1-60
-40
-20
0
20
40
60
80
100
120
140
tiempo(sec)
Am
plit
ud
a)
b)
0.0499 0.0499 0.05 0.05 0.0501-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
tiempo(sec)
Am
plitud
a)b)
Figura 5.6. Respuesta del sistema Deslizante. a) Corriente de la fase “a”. b) Corriente de referencia (Iref).
Figura 5.7. Fenómeno oscilatorio (chattering) del sistema Deslizante. a) Corriente de la fase “a”.
b) Corriente de referencia (Iref).
En Figura 5.7 se presenta la oscilación característica de este tipo de control no lineal,
dicha oscilación es originada debido al deslizamiento del punto inicial alrededor del valor
deseado (Modo de deslizamiento).

Resultados en Simulación y Evaluación de los Controladores No Lineales .
54
0 0.05 0.1 0.15 0.2 0.25 0.3-200
-100
0
100
200
300
400
500
Time (sec)
a)
b)
c)
5.3. Simulación del Controlador Difuso
Los resultados de operación del convertidor con la acción del control difuso que se
implementa en Simulink se muestran en este apartado, como se observa en la Figura 5.8, la
corriente y la tensión de entrada se encuentran en fase.
Figura 5.8. Respuesta del sistema Difuso. a) Tensión de salida. b) Tensión de la fase “a”. c) Corriente de la
fase “a”.
Figura 5.9. Contenido armónico de la corriente de entrada de la fase “a” del sistema difuso.

Resultados en Simulación y Evaluación de los Controladores No Lineales
55
Como se puede apreciar, se logra el comportamiento resistivo deseado hacia la red
eléctrica del rectificador, con corrientes sinusoidales de entrada con bajo contenido
armónico como se observa en la Figura 5.9.
Aunque el bus de CD presenta algunas oscilaciones, esto se puede corregir
recombinando las reglas difusas del primer control difuso encargado de la estabilidad de la
tensión de salida.
El contenido armónico que se presenta en las Figuras 5.3, 5.5 y 5.9, se obtiene cuando
el sistema se encuentra en estado estable bajo la acción de cada uno de los controladores
no lineales.
5.4. Desempeño de los Controladores No Lineales
En esta sección se hace una comparación cuantitativa de los tres controladores
diseñados anteriormente, para medir la eficiencia de los controladores se usa el error
cuadrático medio, la distorsión total de demanda y la respuesta al escalón como índices de
desempeño.
Para comprobar el desempeño de los controladores se desarrollaron las pruebas
siguientes:
• Seguimiento a una corriente de referencia sinusoidal.
• Análisis de la respuesta transitoria del convertidor.
5.4.1. Seguimiento a una Corriente de Referencia Sinusoidal
Cuando el controlador reproduce una corriente de referencia Iref del tipo sinusoidal se
utiliza el error cuadrático medio (Ec), con la finalidad de conocer la desviación que existe
entre la corriente de referencia y la corriente demandada por el convertidor a la red eléctrica
bajo la influencia del controlador. También se mide la distorsión total de demanda (DTD),
que presenta la corriente demandada por el convertidor a la red eléctrica con respecto a una
onda sinusoidal pura.

Resultados en Simulación y Evaluación de los Controladores No Lineales .
56
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1-100
-50
0
50
100
150
Tiempo (seg)
Am
plit
ud
a)
b)
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1-60
-50
-40
-30
-20
-10
0
10
20
Tiempo (seg)
Am
plit
ud
En la Figura 5.10, se muestra la corriente de referencia y la corriente de la fase “a” y
en la Figura 5.11 se observa la señal de error que se genera entre las dos señales bajo la
influencia del control pasivo.
Figura 5.10. Control Pasivo. a) Corriente de la fase “a”. b) Corriente de referencia Iref.
Figura 5.11. Señal de error generada entre la corriente de referencia Iref y la corriente de la fase “a” en el
control pasivo.
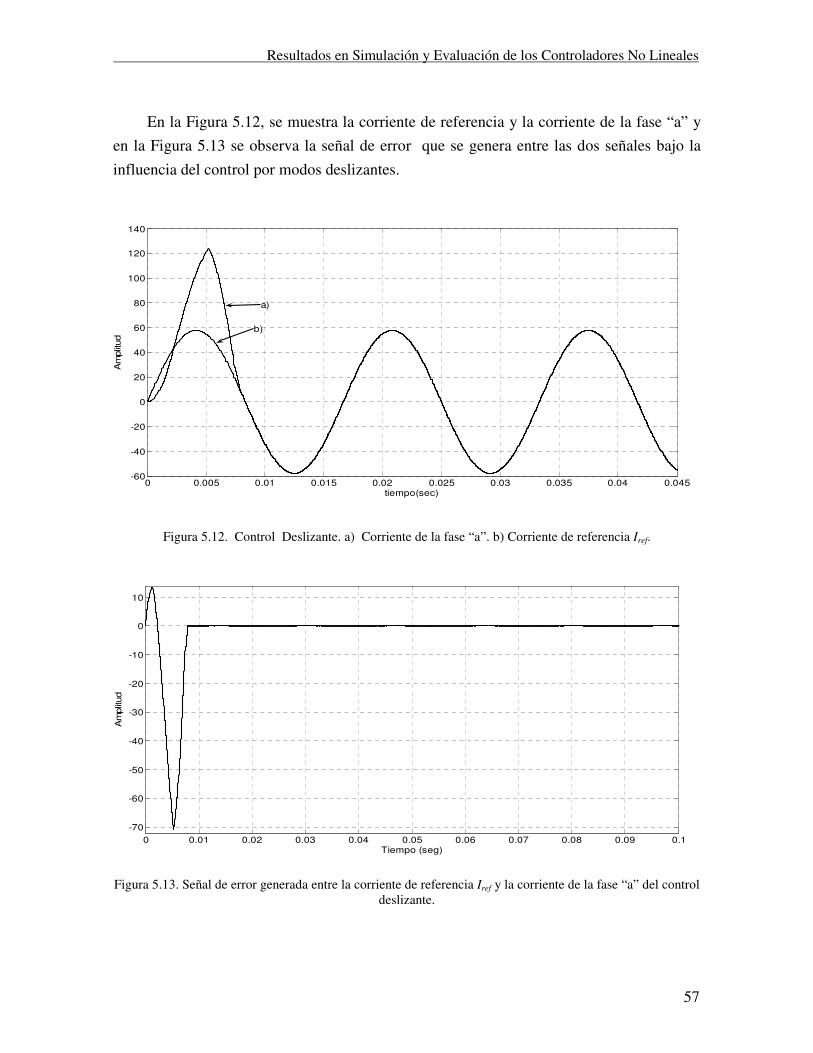
Resultados en Simulación y Evaluación de los Controladores No Lineales
57
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045-60
-40
-20
0
20
40
60
80
100
120
140
tiempo(sec)
Am
plit
ud
a)
b)
En la Figura 5.12, se muestra la corriente de referencia y la corriente de la fase “a” y
en la Figura 5.13 se observa la señal de error que se genera entre las dos señales bajo la
influencia del control por modos deslizantes.
Figura 5.12. Control Deslizante. a) Corriente de la fase “a”. b) Corriente de referencia Iref.
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1
-70
-60
-50
-40
-30
-20
-10
0
10
Tiempo (seg)
Am
plit
ud
Figura 5.13. Señal de error generada entre la corriente de referencia Iref y la corriente de la fase “a” del control
deslizante.

Resultados en Simulación y Evaluación de los Controladores No Lineales .
58
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2-150
-100
-50
0
50
100
150
Tiempo (seg)
Am
plit
ud
a)
b)
0 0.05 0.1 0.15 0.2 0.25 0.3-100
-80
-60
-40
-20
0
20
40
60
80
100
Tiempo (seg)
Am
plit
ud
En la Figura 5.14, se muestra la corriente de referencia y la corriente de la fase “a” y
en la Figura 5.15 se observa la señal de error que se genera entre las dos señales bajo la
influencia del control difuso.
Figura 5.14. Control Difuso. a) Corriente de referencia Iref. b) Corriente de la fase “a”.
Figura 5.15. Señal de error generada entre la corriente de referencia Iref y la corriente de la fase “a” en el
control difuso.

Resultados en Simulación y Evaluación de los Controladores No Lineales
59
En la Tabla 5.2 se muestran los desempeños de los controladores no lineales bajo los
criterios del error cuadrático medio y la distorsión armónica de demanda.
Tabla 5.2. Desempeño de los Controladores No Lineales.
El controlador deslizante es el que mejor logra reducir el error cuadrático medio en la
señal de error y el que menor distorsión armónica de demanda presenta en la corriente de la
fase “a”, esto es debido a que en el arranque del sistema, el punto inicial es atrapado
rápidamente en la superficie de deslizamiento llevándolo hasta el valor deseado, originando
que el control deslizante presente una menor desviación entre la corriente de referencia Iref
y la corriente demandada por el convertidor a la red eléctrica.
5.4.2. Análisis de la respuesta transitoria del convertidor
Este tipo de análisis se usa con el objetivo de observar cual de los controladores no
lineales mencionados anteriormente presenta mayor velocidad de respuesta y menor sobre-
impulso en el seguimiento del bus de CD deseado.
Primeramente se analizó la respuesta del convertidor controlado por pasividad. En la
Figura 5.16 se muestra la respuesta del rectificador, así como los parámetros a tomar en
cuenta, en la Figura 5.17 y 5.18, se tienen las respuestas de los convertidores bajo la
influencia del control deslizante y difuso respectivamente.
En la Tabla 5.3, se observan los resultados obtenidos de las respuestas transitorias de
los diferentes sistemas de control que se aplican al convertidor.
Criterios
Técnica de Control Ec DTD
Pasivo 0.0065 0.6297%
Modos Deslizantes 0.0028 0.08672%
Difuso 0.0078 0.8946%

Resultados en Simulación y Evaluación de los Controladores No Lineales .
60
0 0.01 0.02 0.03 0.04 0.05 0.06
0
50
100
150
200
250
300
350
400
450
Tiempo (seg)
Am
plit
ud
(V)
Ts
Tr
Mp
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02-50
0
50
100
150
200
250
300
350
400
450
500
Tiempo (seg)
Am
plit
ud (V
)
TsTr
Figura 5.16. Tiempo de subida Tr y Tiempo de establecimiento Ts para la tensión de salida Vo del convertidor
bajo el control pasivo.
Figura 5.17. Tiempo de subida Tr , Tiempo de establecimiento Ts y Sobre impulso Mp para la tensión de salida
Vo del convertidor bajo el control deslizante.

Resultados en Simulación y Evaluación de los Controladores No Lineales
61
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14-50
0
50
100
150
200
250
300
350
400
450
500
Tiempo (seg)
Am
plit
ud
(V)
Ts
Tr
Figura 5.18. Tiempo de subida Tr y Tiempo de establecimiento Ts para la tensión de salida Vo del convertidor
bajo el control difuso.
Tabla 5.3. Desempeño de los controladores analizando su respuesta transitoria.
Técnica de
Control
Criterios
Tiempo de subida
(Tr)
Sobre-impulso
(Mp)
Tiempo de
establecimiento (Ts)
Pasivo 0.0100 s ----------- 0.0100 s
Deslizante 0.0062 s 9% 0.0268 s
Difuso 0.0535 s ----------- 0.0535 s
El control deslizante es el que más rápido hace que el bus de CD de salida alcance el
valor de referencia (400V), pero en contraparte en este tipo de control, a mayor velocidad
de respuesta también aumenta el sobre-impulso en la tensión de salida del rectificador.

Resultados en Simulación y Evaluación de los Controladores No Lineales .
62
De lo anterior se considera que el controlador que tiene mejor respuesta transitoria es
el pasivo, ya que no presenta sobre-impulso en la tensión de salida del convertidor y es más
rápido que el control deslizante, ésto es debido al incremento en la velocidad de
convergencia hacia los puntos mínimos deseados de este control por la inyección de
amortiguamiento.

63
Capítulo 6
Conclusiones generales y trabajos futuros
Para finalizar, en este capítulo se presentan las conclusiones generales del documento
de tesis y los trabajos futuros propuestos.
6.1. Conclusiones generales
La reducción del contenido armónico en las corrientes de entrada, así como un bus de
CD regulado de un rectificador PWM trifásico elevador se logra por medio de técnicas de
control no lineal, ya que el control se adapta a cualquier punto de operación en que se
encuentre el convertidor.
En el control pasivo los elementos parásitos del circuito de potencia pueden originar
un valor incorrecto de ∗1x , causando un error en estado estable de la tensión de salida,
especialmente disturbios con cargas grandes, ya que el rango de convergencia de la tensión
de salida en estado estable dependerá de las características inherentes de la carga y de los
remanentes no controlados. Lo anterior se soluciona con un lazo de control de tensión PI
externo para el bus de CD, el cual tendrá como función principal regular la corriente ∗1x .
Para el control deslizante, se tiene que si se aumenta la velocidad de desplazamiento
del punto inicial hacia la superficie de deslizamiento y posteriormente al valor deseado, el
sobre-impulso del bus de CD se hará más grande, con lo cual a menor velocidad de
desplazamiento menor es el sobre-impulso en el bus de CD del convertidor. Aclarando que
dicho sobre-impulso siempre estará presente en este tipo de control y sólo podrá
desaparecer anidando un control externo para el bus de CD.

Conclusiones generales y trabajos futuros .
64
El control que presenta mayor complejidad en su diseño es el difuso, ya que cuenta
con dos controles anidados, el primero para evitar el contenido armónico en las corrientes
de entrada del rectificador y el segundo para la regulación del bus de CD. Debido a esto se
generan una gran cantidad de reglas difusas que se tienen que ajustar de acuerdo a los
parámetros de operación que se desean, dando origen a tiempos de simulación largos.
Tomado en cuenta los índices de desempeño que se utilizaron en este trabajo para
evaluar la respuesta de cada control no lineal aplicado al ratificador se tiene que:
• El control deslizante presenta el menor error cuadrático medio y la menor distorsión
armónica de demanda, sin embargo origina un sobre-impulso en la tensión de salida
del rectificador debido a los modos de alcanzabilidad y deslizamiento característicos
de este control; en cambio, el control pasivo y difuso no presentan este fenómeno de
sobre-impulso.
• El controlador que tiene mejor respuesta transitoria es el pasivo, ya que no presenta
sobre-impulso en la tensión de salida del convertidor y es más rápido que el control
deslizante y el difuso. En el control pasivo se puede monitorear que tanto la tensión
y la corriente de cada línea se encuentren en fase, además de detectar algún
desbalance en la red eléctrica, gracias al uso de la transformación dq.
En resumen, la técnica que presenta mejores resultados es la pasiva, tanto en la
facilidad del diseño como en simulación, ya que el modos deslizantes necesita un control
anidado para eliminar el sobre-impulso en el bus de CD, el control difuso es más complejo
de implementar ya que utiliza dos controles anidados, dando origen a tiempos de
programación largos, sin mencionar el ajuste de las reglas difusas.
6.2. Trabajos Futuros
• En este trabajo de tesis se realizó una evaluación de las tres técnicas de control no
lineal aplicadas a rectificador trifásico, obteniéndose resultados exclusivamente en
simulación, con lo cual se espera que se concrete la investigación por medio de la
implementación física de dichas técnicas de control, para lograr una comparación
más completa de la que se obtiene en simuladores. Una posible opción de
implementación seria por medio de un sistema mínimo basado en un DSP.

Conclusiones generales y trabajos futuros
65
• Para el control deslizante, implementar el control anidado ya sea difuso o pasivo,
tanto en simulación como en la parte experimental, con la finalidad de eliminar el
sobre-impulso que se presenta en el bus de CD del rectificador PWM trifásico
elevador.
• En el control pasivo, realizar un estudio experimental de los efectos de la inyección
de amortiguamiento al convertidor trifásico, para conocer de qué manera afecta
físicamente a los dispositivos de conmutación del convertidor.
• Con el diseño terminado de los tres controles y una posible implementación física
se puede realizar un estudio más detallado de pérdidas en los dispositivos de
potencia para lograr la óptima operación del convertidor.

87
BIBLIOGRAFIA
[1] Nishida, Y.; Kondoh, T.; Ishikawa, M.; Yasui, “Three-phase PWM-current-sourse type
PFC rectifier”, K.; Power Conversion Conference, 2002. PCC Osaka 2002, Proceedings
of the, Vol. 3, 2-5 April 2002, pp: 1217-1222 vol.3.
[2] Salmon, J., Dixon, J. e Kulkarni, A., “A Three-Phase Controlled-Current PWM
Converter with Leading Power Factor”, IEEE Transactions on Industrial Applications,
vol. IA-23, no. 1, Jan. 1987, pp. 78-84.
[3] Jasinski, M.; Liserre, M.; Blaabjerg, F.; Cichowlas, “Fuzzy logic current controller for
PWM rectifiers”, M.; IECON 02 [Industrial Electronics Society, IEEE 2002 28th
Annual Conference of the], Vol. 2, Nov 5-8, 2002, pp.1300-1305.
[4] http:// www.ti.com/
[5] JM Carrasco, E Galvan, G Escobar, AM Stankovic, “Passivity-based controller for
three phase synchronous rectifier” Industrial Electronics Society, 2000. IECON 2000.
26th Annual Conference of IEEE,2000, pp. 2629-2634.
[6] Escobar, G. Stankovic, A.M. Mattavelli, P. “An adaptive controller instationary
reference frame for D–Statcom in unbalanced operation” Industrial Electronics, IEEE
Transactions on Vol. 51, Issue 2, April 2004 pp: 401 – 409.
[7] Pérez, M. Ortega, R. “Passivity-Based PI Control of Switched Power Converters”
Industrial Electronics, IEEE Transactions on Vol. 12, April 2004, pp. 881 – 890.
[8] T.-S. Lee, “Lagrangian Modeling and Passivity-Based Control of Three-Phase AC/DC
Voltage-Source Converters,” IEEE Trans. Power Electron. Vol. 51, no. 4, pp. 892-902,
August 2004.
[9] H. Sira-Ramirez, R. A. Perez-Moreno, R. Ortega, and M. Garcia-Esteban, “Passivity-
based controllers for stabilization of DC-to-DC power converters,” Automatica, vol. 33,
no. 4, pp. 499-513, 1997.
[10] G. Pérez-Ladrón, V. Cárdenas, N. Visairo, F. Pasos. “Evaluación Experimental de un
Algoritmo de Control Basado en Pasividad para Inversores de Potencia” Congreso
Nacional de Control Automático, pp. 540-545, Octubre 2006.
88
[11] M. Flota, R. Álvarez, C. Núñez, J. Lira. “Desempeño de Dos Técnicas de Control para
un Rectificador Activo Monofásico” Congreso Nacional de Control Automático, pp.
471-476, Octubre 2006.
[12] Ortega, R. Mareels, I. “Energy-Balancing Passivity-Based Control” Proceedings of
the American Control Conference, pp. 1265-1270, June 2000.
[13] Y. Lu, K.W.E. Cheng, S.L. Ho and J.F. Pan, “Passivity-Based control of a phase-
shifted resonant converter” IEEE Trans. Power Electron. Vol. 152, no. 6, pp. 1509-
1515, November 2005.
[14] M Jasinski, M Liserre, F Blaabjerg, M Cichowlas,” Fuzzy logic current controller for
PWM rectifiers,”Industrial Electronics Society. IECON 2002. 28th Annual Conference
of IEEE, Nov. 2002, pp1300-13005.
[15] Xu, J. Zhao, J. Luo, J. “A new control strategy of unity power factor for three-phase
pwm rectifier system” Industrial Electronics Society, IECON 2004. 30th Annual
Conference of IEEE, 2004, pp 709-714.
[16] Cecati, C.; Aquila, A.; Lecci, A.; Liserre, M. “Implementation Issues of a Fuzzy-
Logic-Based Three-Phase Active Rectifier Employing Only Voltage Sensors”
Industrial Electronics, IEEE Transactions on Vol. 52, Issue 2, April 2005 pp. 378 –
385.
[17] Chen, Y. Zhong, Y. Zhang, S. “A Novel Nonlinear Control Method for the Output
Voltage of Three-Phase Voltage-Source PWM Rectifier” Industrial Electronics
Society. IECON 2002. 28th Annual Conference of IEEE, Nov. 2002, pp1290-1294.
[18] Cecati, C.; Aquila, A.; Ometo, A.; Liserre, M. “A Fuzzy-Logic CC-PWM Three-Phase
AC/DC Converters” in Conf. Rec. 35 th IEEE-IAS Annu. Meeting, Rome, Italy,
Oct.8-12, 2000, pp. 987 – 992.
[19] Cecati, C.; Aquila, A.; Lecci, A.; Liserre, M. “A Fuzzy-Logic-Based Controller Active
Rectifier” Industrial Electronics, IEEE Transactions on Vol. 39, no. 1, pp. 105-112.
February 2003.
[20] Saetieo, S.; Torrey, D. “Fuzzy Logic Control of a Space-Vector PWM Current
Regulator for Three-Phase Power Converters” IEEE Transactions on Vol. 13, no. 3,
pp. 419-426. May 1998.
[21] Cecati, C.; Aquila, A.; Ometo, A.; Liserre, M.; Caponio, L. “A Fuzzy-Logic Feed-
forward Current Controller for PWM Rectifiers” Proc. of ISIE’2000, pp. 430 – 435.
89
[22] V Soares, P Verdelho, “Linear and sliding-mode controllers for three-phase four-wire
power converters”Industrial Electronics, 2005. ISIE 2005. Proceedings of the IEEE
International Symposium on, June 2005, pp 799-804.
[23] Pires, V. Silva, J. “Teaching Nonlinear Modeling, Simulation, and Control of
Electronic Power Converters Using Matlab/Simulink” IEEE Transactions on Vol. 45,
no. 3, pp. 253-261. August 2002.
[24] Coleman, C. Godbole, D. “A Comparison of Robustness: Fuzzy Logic, PID & Sliding
Mode Control” IEEE Transactions, pp. 1654-1659. 1994.
[25] Escobar, G. Ortega, R. Sira-Ramirez, H. Vilain, J-P. Zein, I. “An Experimental
Comparison of Several Nonlinear Controllers for Power Converters” IEEE
Transactions, pp. 66-79. February 1999
[26] J.F. Silva, “Sliding-Mode control of boost-type unit-power-factor PWM rectifiers”
IEEE Transactions on Industrial Electronics, Vol. 46, no. 3, pp. 594-603, June, 1999.
[27] R. Ortega, A. Loria, P. J. Nicklasson, and H. Sira-Ramirez, Passivity- Based Control
of Euler-Lagrange Systems; Mechanical, Electrical and Electromechanical
Applications. London, U.K.: Springer-Verlag, 1998.
[28] Olmos López, José Armando. “Control no lineal robusto basado en pasividad para
filtros activos paralelo y serie”. 2004. Tesis de maestría. Cenidet.
[29] P. Verdelho and G. D. Marques, “DC voltage control and stability analysis of PWM
voltage-type reversible rectifiers,” IEEE Trans. Ind. Electron., vol. 45, pp. 263–273,
Apr. 1998.
[30] V. Blasko and V. Kaura, “A new mathematical model and control of a three-phase
AC-DC voltage source converter,” IEEE Trans. Power Electron., vol. 12, pp. 116–
123, Jan. 1997.
[31] H. Komurcugil and O. Kukrer, “Lyapunov-based control for three phase PWM
AC/DC voltage-source converters,” IEEE Trans. Power Electron., vol. 13, pp. 801–
813, Sept. 1998.
[32] T.-S. Lee, “Input-output linearization and zero-dynamics control of three-phase
AC/DC voltage-source converters,” IEEE Trans. Power Electron., vol. 18, pp. 11–22,
Jan. 2003.

67
ANEXO A
A.1. Representación Matricial en el Marco de Referencia
a-b-c y dq del Rectificador Trifásico PWM Elevador
En este Anexo se presenta el desarrollo matemático para la representación en forma
matricial del modelo del rectificador trifásico PWM elevador, tanto en el marco de
referencia a,b,c como en el dq.
Primeramente se analiza al rectificador en el marco de referencia a-b-c. En el
rectificador mostrado en la figura A.1, se agrega una carga resistiva con la finalidad de
establecer la función de Lagrange del rectificador trifásico.
n
ea eb ec
L
L
L
R
R
R
ia
ib
ic
io i L
ico
Sa Sb Sc
__
Sa
__
Sb
__
Sc
Vo
+
-
g
a
b
c
RL
Figura A.1. Rectificador trifásico PWM elevador con carga resistiva.
La función Lagraniana que define al sistema eléctrico del convertidor es:
( )qqqqq V-TL
=
••
,, (A.1)

68
Donde:
•
qq,T = Co-energía del circuito. q =Vector de cargas eléctricas.
( )qV = Energía del circuito. •
q =Vector de corrientes.
La ecuación E-L del convertidor de la figura A.1 se encuentra definida por:
FDLL
=
∂
∂+
∂
∂−
∂
∂••
qdt
d (A.2)
La co-energía del convertidor se define como:
++=
++=
•••
•••
222
222
2
1
2
1
2
1
2
1
LcLbLa
LcLbLa
qqqL
qLqLqL
T
T
(A.3)
La ecuación de la energía del convertidor es:
2
2
1C
qC
=V (A.4)
Para encontrar el término D , en donde se incluyen las componentes resistivas del
convertidor, se proponen las siguientes relaciones:
2
2
2
2
1
2
1
2
1
Lcc
Lbb
Laa
qRG
qRG
qRG
•
•
•
=
=
=
(A.5)
Las relaciones anteriores representan la energía disipada en las resistencias de cada
fase. Ahora la energía disipada en la resistencia de carga se define como:
( )2
2
1
2
1
++−=
•
cbaCLRLpcipbipaiqRG (A.6)

69
Sumando (A.5) y (A.6):
RLCba
GGGG +++=D
( )2222
2
1
2
1
2
1
++−+
++=
••••
cbaCLLcLbLapcipbipaiqRqqqRD (A.7)
Si Laa
qi
•
= , Lbb
qi
•
= y Lcc
qi
•
=
2222
2
1
2
1
2
1
++−+
++=
•••••••
LcLbLaCLLcLbLaqpcqpbqpaqRqqqRD (A.8)
Agrupando las fuentes de tensión en F :
[ ]T
cbaeee 0=F (A.9)
Sustituyendo (A.1) en (A.2):
FDVTT
=
∂
∂+
∂
∂+
∂
∂−
∂
∂••
qqq
qdt
d (A.10)
Como [ ]cba
qqqq = ,
=
••••
LcLbLaqqqq y sustituyendo (A.9) en (A.10), se
obtiene el siguiente sistema de ecuaciones:
0=
∂
∂+
∂
∂+
∂
∂−
∂
∂
=
∂
∂+
∂
∂+
∂
∂−
∂
∂
=
∂
∂+
∂
∂+
∂
∂−
∂
∂
=
∂
∂+
∂
∂+
∂
∂−
∂
∂
••
••
••
••
CCC
C
c
LcLcLc
Lc
b
LbLbLb
Lb
a
LaLaLa
La
qqq
qdt
d
e
qqq
qdt
d
e
qqq
qdt
d
e
qqq
qdt
d
DVTT
DVTT
DVTT
DVTT
(A.11)

70
Sustituyendo (A.3), (A.4) y (A.8) en (A.11), y derivando el resultado:
02
11
2
1
2
1
2
1
2
1
2
1
2
1
=
++−+
=
++−−+
=
++−−+
=
++−−+
••••
••••••
••••••
••••••
LcLbLaCLC
cLcLbLaCLLcLc
bLcLbLaCLLbLb
aLcLbLaCLLaLa
qpcqpbqpaqRqC
epcqpcqpbqpaqRqRqLdt
d
epbqpcqpbqpaqRqRqLdt
d
epaqpcqpbqpaqRqRqLdt
d
(A.12)
De la figura A.1, se puede observar que:
COoLiii −= (A.13)
Sustituyendo (A.9) en (A.13):
++−=−
••••
LcLbLaCLqpcqpbqpaqi
2
1 (A.14)
Considerando que L
o
L
R
Vi = y
Coq
CV
1= , se deduce la siguiente expresión para
Li :
C
L
Lq
CRi
1= (A.15)
Con lo que remplazando (A.15) en (A.14):
C
L
LcLbLaCq
CRqpcqpbqpaq
1
2
1−=
++−
••••
(A.16)
Sustituyendo (A.16) en (A.12):
c
C
LcLc
b
C
LbLb
a
C
LaLa
epcC
qqRqL
dt
d
epbC
qqRqL
dt
d
epaC
qqRqL
dt
d
=
++
=
++
=
++
••
••
••
2
1
2
1
2
1
(A.17)

71
Como KLK
iq =•
donde cbaK ,,= se tiene:
( ) 02
1
2
1
2
1
2
1
=+++−
=++
=++
=++
L
cba
cc
c
bb
b
aa
a
R
Vopcipbipai
dt
dVoC
epcVoRidt
diL
epbVoRidt
diL
epaVoRidt
diL
(A.18)
El sistema (A.18), muestra el modelo E-L del rectificador PWM en el marco de
referencia a, b, c. Este sistema de ecuaciones puede ser expresado en forma matricial como:
=
L
L
L
L
000
000
000
000
M (A.19) ( )
−−−
=
02
1
2
1
2
12
1000
2
1000
2
1000
pcpbpa
pc
pb
pa
uJ (A.20)
=
LR
R
R
R
1000
000
000
000
R (A.21)
=
Vo
i
i
i
c
b
a
w (A.22)
=•
dt
dV
dt
di
dt
di
dt
di
O
c
b
a
w (A.23)
Con (A.19) a (A.23), se puede expresar (A.18) como:
( ) FRwwuJwM =++•
(A.24)

72
Donde:
M= Matriz diagonal definida positiva.
R= Matriz de disipación.
J= Matriz de interconexión con los interruptores.
F= Vector de fuentes de tensión.
[ ]T
obVca iiiw =
Ahora se analizara al rectificador en el marco de referencia dq. El modelo E-L del
rectificador en el marco de referencia a, b, c, es expresado en el marco referencia d-q por
medio de la matriz de transformación definida por:
( ) ( )( ) ( )
°+°−
°+°−=
120120
120cos120coscos
tsentsentsen
tttT
ωωω
ωωω (A.25)
Aplicando la matriz de transformación a la ecuación de tensión del convertidor:
eTe
e
q
d
3
2=
(A.26)
S
q
d
iTi
i
3
2=
(A.27) VsT
p
pVo
q
d
3
2
2
1=
(A.28)
pTp
p
q
d
3
2=
(A.29)
S
q
d
iRTi
iR
3
2=
(A.30)
dt
idTL
i
iL
i
i
dt
dL
S
d
q
q
d
3
2=
−−
ω (A.31)
De la figura A.1, se tiene que:
( )
( )
( )°+=
°−=
=
120cos
120cos
cos
tEm
tEm
tEm
e
e
e
c
b
a
ω
ω
ω
(A.32)

73
VsiRdt
idLe
S
S ++= (A.33)
La transformación d-q de (A.33) es:
+
+
−−
=
+
+
−−
=
q
d
q
d
d
q
q
d
q
d
q
d
q
d
d
q
q
d
p
pVo
i
iR
i
iL
i
i
dt
dL
e
e
p
pVo
i
iR
i
iL
i
i
dt
dLeT
2
1
2
1
3
2
ω
ω
(A.34)
La transformación d-q de (A.32) da como resultado:
( ) ( )( ) ( )
0
.
120120
120cos120coscos
3
2
=
=
°+°−
°+°−=
q
d
c
b
a
q
d
e
Eme
e
e
e
tsentsentsen
ttt
e
e
ωωω
ωωω
(A.35)
Sustituyendo (A.35) en (A.34):
+
+
−−
=
q
d
q
d
d
q
q
d
p
pVo
i
iR
i
iL
i
i
dt
dL
Em
2
1
0ω (A.36)
Desarrollando (A.36):
EmVopdRiLidt
diL
dq
d =+++2
1ω (A.37)
02
1=++− VopqRiLi
dt
diL
qd
q
ω (A.38)

74
Considerando (A.27) y (A.28), y aplicando la transformación d-q a (A.39):
S
T
oipi
2
1= (A.39)
[ ]
[ ]o
q
d
o
q
d
S
T
S
TT
ii
ipqpd
ii
ipqpd
ipiTTp
=
=
=
12
9
34
9
2
1
3
1
( )qdo
pqipdii +=4
3 (A.40)
De (A.13) se tiene que:
0=+−LoCO
iii (A.41)
Sustituyendo (A.40) en (A.41), tomando en cuenta que dt
dVoCi
CO= y
L
L
R
Voi = :
03
2
2
1
2
1
3
2=+−−
L
qd
R
Vopqipdi
dt
dVoC (A.42)
Planteando las siguientes igualdades:
Vox
ix
ix
q
d
=
=
=
3
2
1
dt
dVox
dt
dix
dt
dix
q
d
=
=
=
•
•
•
3
2
1
(A.43)

75
Sustituyendo (A.43) en (A.37), (A.38) y (A.42):
LR
xpqxpdxxC
pqxRxLxxL
EmpdxRxLxxL
3
213
3212
3121
3
2
2
1
2
1
3
2
02
1
2
1
+−−
=++−
=+++
•
•
•
ω
ω
(A.44)
El sistema (A.44) muestra el modelo E-L del rectificador PWM en el marco de
referencia d-q. Este sistema de ecuaciones puede ser expresado en forma matricial si:
=
C
L
L
3
200
00
00
M (A.45)
−=
000
00
00
1 L
L
ω
ω
J (A.46)
( )
−−
=
02
1
2
12
100
2
100
2
pqpd
pq
pd
uJ (A.47)
=
LR
R
R
3
200
00
00
R (A.48)
[ ]
[ ]T
T
T
pqpdu
xxxx
xxxx
=
=
=
••••
321
321
(A.49)
=
0
0
Em
ε (A.50)

76
Con las expresiones de (A.45) a (A.50), se puede expresar a (A.44) como:
( )[ ] ε=+++•
xRxJJxM u21 (A.51)
Con las ecuaciones (A.24) y (A.51), el rectificador trifásico queda modelado en forma
matricial tanto en el marco de referencia a, b, c, como en el dq.

77
ud
uq
in_w
p_a
p_b
p_c
qd0-abc
ec
eb
ea
in_w
In_a,b,c
id
iq
abc-dq0
V0
To Workspace3
Step
Scope6
Scope5 Scope4 Scope3
Scope2
Scope1
Scope
Saturation2
Saturation1
SaturationRelay1
Relay
Fases a,b,c
In_pa,pb,pc
V0
Out_ia,ib,ic
RECTIFICADOR TRIFÁSICO
In_w
In_id
In_iq
Out_ud
Out_uq
PBC
Vabc* Pulses
MODULADOR
1
s
Integrator1
-K-
Gain3
-K-
Gain2
-K-
Gain1
-K-
Gain
ANEXO B
B.1. Esquemas utilizados para generar las simulaciones
de los controles no lineales.
En este anexo se presenta la implementación en Simulink del control pasivo,
deslizante y difuso respectivamente, así como la validación del control pasivo en Psim.
Figura B.1. Sistema de control pasivo en Simulink.

78
2
Out_ia,ib,ic
1
V0
In_pc
ec
Vcn
Out_ic
pc*ic
phase3
in_pb
eb
Vbn
Out_ib
pb*ib
phase2
In_pa
ea
Van
Out_ia
pa*ia
phase1
in_pa
in_pb
in_pc
in_Vo
Out_Van
Out_Vbn
Out_Vcn
SW
Io´-Io
1
s
Integrator
1/2
Gain4
400
Constant1
-K-
1/R0
-K-
1/Co
2
In_pa,pb,pc
1
Fases a,b,c
2
Out_uq
1
Out_ud
0
X2*in_Vr
in_Vo=x3
IL
x1*
X1*
400
Vr
in_w
in_x2*
in_x2=iq
in_x1*
in_x1=id
uq
ud
PBC-C-
Constant
3
In_iq
2
In_id
1
In_w
El esquema general del control pasivo en Simulink se muestra en la figura B.1, este
sistema esta formado principalmente por el modelado del rectificador, el control pasivo, la
transformación d-q y el PWM. Estas etapas se muestran en las figuras B.2, B.3, B.4, B.5 y
B.6.
Figura B.2. Modelado del rectificador para el control pasivo.
Figura B.3. Modelado del control pasivo en Simulink.

79
dq-abc
3
p_c
2
p_b
1
p_a
sin
sin
cos
cos
sin
cos
(2*pi)/3
3
in_w
2
uq
1
ud
abc_dq
2
iq
1
idcos
sin
sin
sin
cos
cos
(2*pi)/3
2/3
2/3
2
In_a,b,c
1
in_w
1
Pulses
Repeating
Sequence
f=10000Hz
2.4
Gain
1
Vabc*
Figura B.4. Transformada dq-abc en Simulink.
Figura B.5. Transformada abc-dq en Simulink.
Figura B.6. PWM en Simulink.

80
VS3
VS2
VS1Controlador por Modos Deslizantes/PWM
Controlador/PWM
CONVERTIDOR AC/DC TRIFASICO BOOTS
AC/DC
4
Vo
3
Out_is3
2
Out_is2
1
Out_is1
In_gama3
VS3
VS3N
Out_is3
gama3*is3
phase3
In_gama2
VS2
VS2N
Out_is2
gama2*is2
phase2
In_gama1
Vs1
VS1N
Out_is1
gama1*is1
phase1
0
Vo(0)
Subtract
in_gama1
in_gama2
in_gama3
in_Vo
Out_Vs1N
Out_Vs2N
Out_Vs3N
SW
1
sxo
Integrator
-K-
1/R0
-K-
1/Co
1/2
1/27
In_Vo
6
VS3
5
In_gama3
4
VS2
3
In_gama2
2
VS1
1
In_gama1
El esquema del control deslizante en Simulink se muestra en la figura B.7, este
sistema esta formado principalmente por el modelado del rectificador, el control deslizante
y el PWM. Estas etapas se muestran en las figuras B.8 y B.9.
Figura B.7. Sistema de control deslizante en Simulink.
Figura B.8. Modelado del rectificador para el control pasivo.
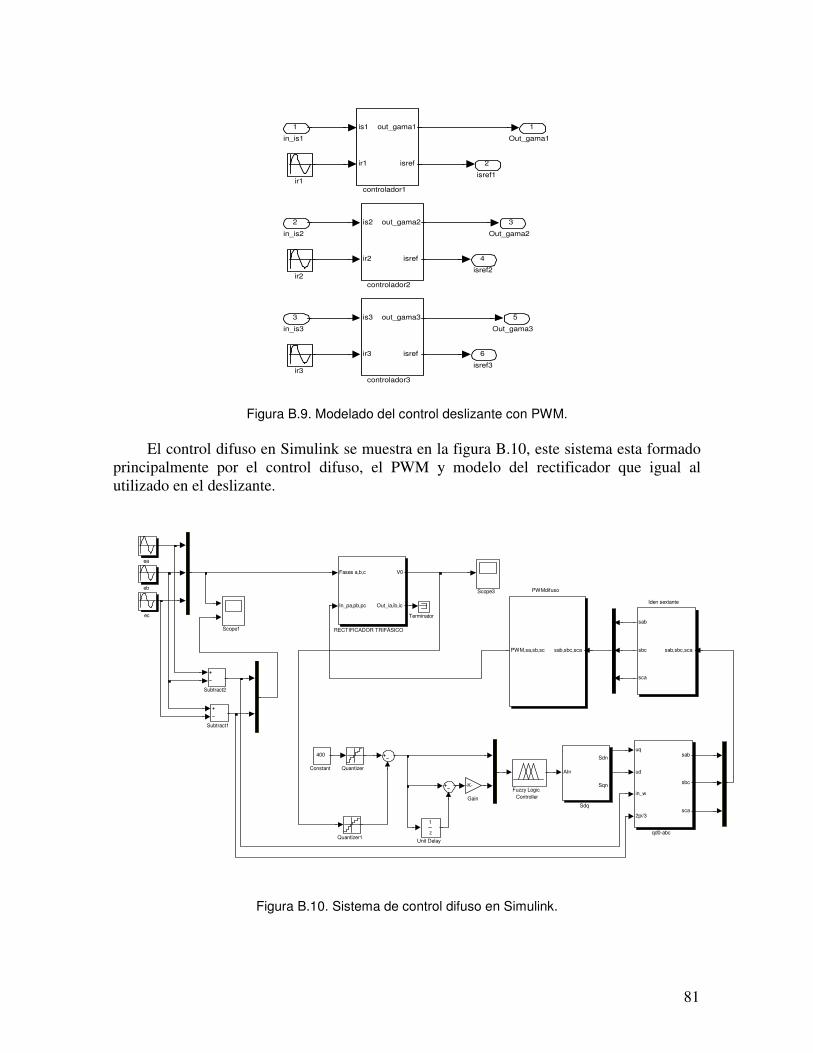
81
6
isref3
5
Out_gama3
4
isref2
3
Out_gama2
2
isref1
1
Out_gama1
ir3
ir2
ir1
is3
ir3
out_gama3
isref
controlador3
is2
ir2
out_gama2
isref
controlador2
is1
ir1
out_gama1
isref
controlador1
3
in_is3
2
in_is2
1
in_is1
uq
ud
in_w
2pi/3
sab
sbc
sca
qd0-abc
ec
eb
ea
z
1
Unit Delay
Terminator
Subtract2
Subtract1
AIn
Sdn
Sqn
Sdq
Scope3
Scope1
Fases a,b,c
In_pa,pb,pc
V0
Out_ia,ib,ic
RECTIFICADOR TRIFÁSICO
Quantizer1
Quantizer
sab,sbc,scaPWM,sa,sb,sc
PWMdifuso
sab,sbc,sca
sab
sbc
sca
Iden sextante
-K-
Gain
Fuzzy Logic
Controller
400
Constant
Figura B.9. Modelado del control deslizante con PWM.
El control difuso en Simulink se muestra en la figura B.10, este sistema esta formado
principalmente por el control difuso, el PWM y modelo del rectificador que igual al
utilizado en el deslizante.
Figura B.10. Sistema de control difuso en Simulink.
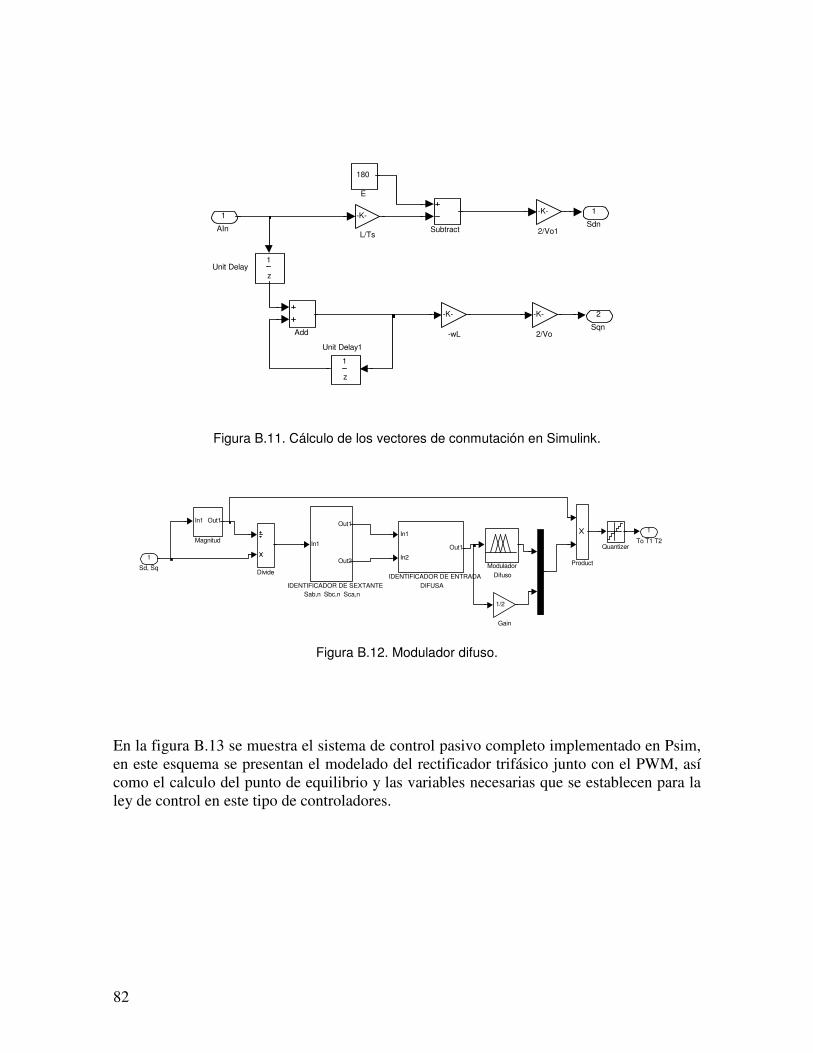
82
2
Sqn
1
Sdn
z
1
Unit Delay1
z
1Unit Delay
Subtract
-K-
L/Ts
180
E
Add
-K-
2/Vo1
-K-
2/Vo
-K-
-wL
1
AIn
1
To T1 T2Quantizer
ProductModulador
Difuso
In1 Out1
MagnitudIn1
Out1
Out2
IDENTIFICADOR DE SEXTANTE
Sab,n Sbc,n Sca,n
In1
In2
Out1
IDENTIFICADOR DE ENTRADA
DIFUSA
1/2
Gain
Divide
1
Sd, Sq
Figura B.11. Cálculo de los vectores de conmutación en Simulink.
Figura B.12. Modulador difuso.
En la figura B.13 se muestra el sistema de control pasivo completo implementado en Psim,
en este esquema se presentan el modelado del rectificador trifásico junto con el PWM, así
como el calculo del punto de equilibrio y las variables necesarias que se establecen para la
ley de control en este tipo de controladores.
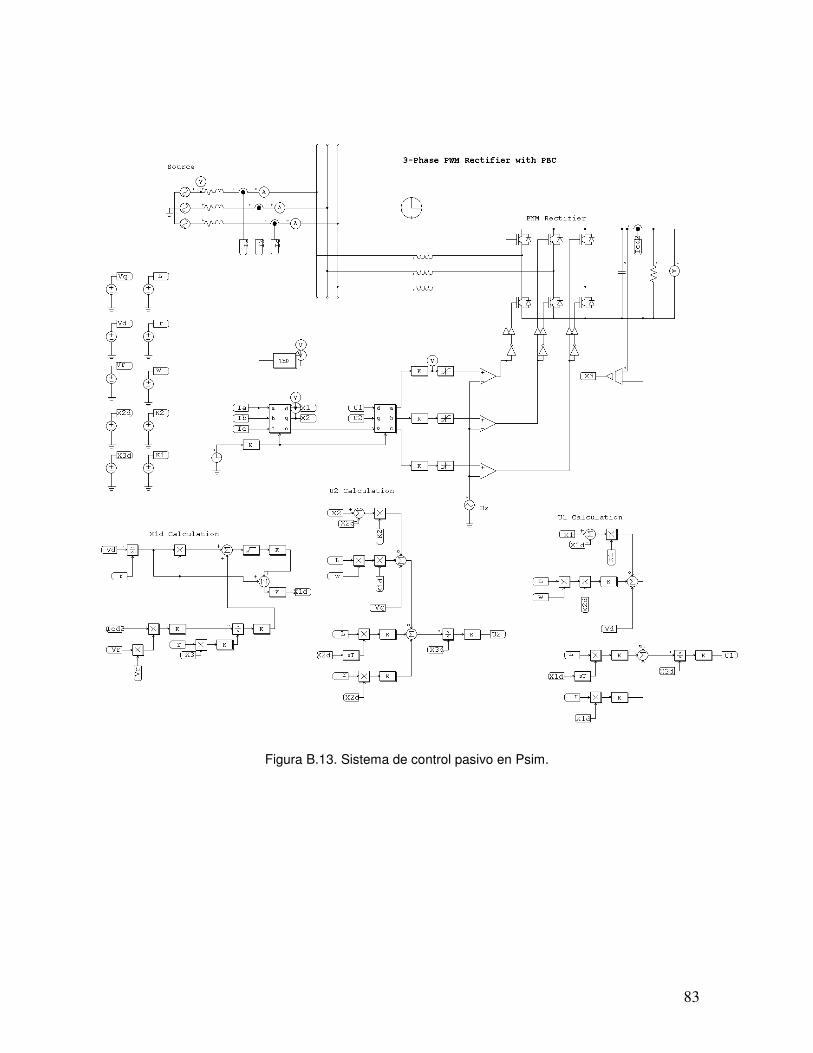
83
Figura B.13. Sistema de control pasivo en Psim.

84
ANEXO C
C.1. Parámetros de Desempeño
En esta sección de describen los parámetros usados para medir el desempeño de los
diferentes algoritmos de control, dicho desempeño se puede medir en términos de la
respuesta ante entradas específicas, como son: impulso, rampa, escalón y otras, o también
se puede medir en términos de un índice de desempeño.
Un índice de desempeño es un número que indica la bondad del comportamiento de
un sistema. Se considera que un sistema de control es óptimo si los valores de los
parámetros se eligen de tal forma que el índice de desempeño elegido sea mínimo o
máximo según sea el caso. Los valores de los parámetros dependen directamente del índice
de desempeño seleccionado.
Un índice de desempeño debe de presentar un único valor numérico positivo o cero,
este último si y sólo si la medida de la desviación es cero. Los índices de desempeño que se
utilizan para medir la eficiencia de los controladores no lineales diseñados son:
• Error Cuadrático Medio.
• Distorsión Armónica Total y de Demanda.
• Respuesta al escalón.
C.1.1. Error Cuadrático Medio
El error cuadrático medio, es un valor que representa el valor de desviación entre
dos señales, el error cuadrático medio se define [12] como:

85
( )( )1
1
2
−
−
=∑
nn
n
Lref
C
ii
E (C.1)
Donde:
demandadaCorriente
referenciadeCorriente
muestrasdeNumero
cuadráticoError
i
i
n
E
L
ref
C
=
=
=
=
C.1.2. Distorsión Armónica Total y de Demanda
La distorsión armónica se define como la distorsión periódica de una forma de onda
sinusoidal. La distorsión armónica en la red eléctrica se puede presentar en tensión o en
corriente, y se cuantifica mediante la distorsión armónica total DAT o distorsión total de
demanda DTD respectivamente. En términos matemáticos ambas distorsiones se definen
como [34]:
V
V
DAT
H
h
h
1
2
2
100
∑=
= (C.2) I
I
DTD
H
h
h
1
2
2
100
∑=
= (C.3)
Donde:
.
.1
.
.
.
.
1
1
evaluaraarmónicodeNúmero
lfundamentalaindicaarmónicodeNúmero
corrientedelfundamentaComponente
corrientedearmónicohdelComponente
tensióndelfundamentaComponente
tensióndearmónicohdelComponente
H
h
I
I
V
V
h
h
=
=
=
=
=
=

86
Para este caso se usa la distorsión total de demanda (DTD), ya que está medida
proporciona información de la distorsión que existe en la forma de onda de corriente.
C.1.3. Respuesta al Escalón
Con la respuesta al escalón, se observan otras características, como por ejemplo que
controlador es más rápido y tiene menor sobre-impulso. Los parámetros a considerar son:
• Tiempo de subida (Tr).
• Sobre-impulso (MP).
• Tiempo de establecimiento (Ts).
Este índice de desempeños se utiliza para evaluar la respuesta transitoria de cada uno de
los convertidores no lineales diseñados en secciones anteriores.