methodological foundation of a numerical taxonomy of urban
TRANSCRIPT

1
Methodological Foundation of a Numerical Taxonomy of Urban
Form
Martin FLEISCHMANN
Department of Geography and Planning, University of Liverpool, Roxby Building, Liverpool,
L69 7ZT, United Kingdom. [email protected]; +44(0)7482 082 1247;
Corresponding author
Department of Architecture, University of Strathclyde
Alessandra FELICIOTTI
Department of Architecture, University of Strathclyde, [email protected]
Ombretta ROMICE
Department of Architecture, University of Strathclyde, [email protected]
Sergio PORTA
Department of Architecture, University of Strathclyde, [email protected]
2
Methodological Foundation of a Numerical Taxonomy of Urban
Form
Abstract
Cities are complex products of human culture, characterised by a startling diversity of visible
traits. Their form is constantly evolving, reflecting changing human needs and local
contingencies, manifested in space by many urban patterns.
Urban Morphology laid the foundation for understanding many such patterns, largely relying
on qualitative research methods to extract distinct spatial identities of urban areas. However,
the manual, labour-intensive and subjective nature of such approaches represents an
impediment to the development of a scalable, replicable and data-driven urban form
characterisation. Recently, advances in Geographic Data Science and the availability of
digital mapping products, open the opportunity to overcome such limitations. And yet, our
current capacity to systematically capture the heterogeneity of spatial patterns remains limited
in terms of spatial parameters included in the analysis and hardly scalable due to the highly
labour-intensive nature of the task. In this paper, we present a method for numerical
taxonomy of urban form derived from biological systematics, which allows the rigorous
detection and classification of urban types. Initially, we produce a rich numerical
characterisation of urban space from minimal data input, minimizing limitations due to
3
inconsistent data quality and availability. These are street network, building footprint, and
morphological tessellation, a spatial unit derivative of Voronoi tessellation, obtained from
building footprints. Hence, we derive homogeneous urban tissue types and, by determining
overall morphological similarity between them, generate a hierarchical classification of urban
form. After framing and presenting the method, we test it on two cities - Prague and
Amsterdam - and discuss potential applications and further developments. The proposed
classification method represents a step towards the development of an extensive, scalable
numerical taxonomy of urban form and opens the way to more rigorous comparative
morphological studies and explorations into the relationship between urban space and
phenomena as diverse as environmental performance, health and place attractiveness.
Keywords: urban morphometrics, classification, numerical taxonomy, urban morphology

4
Introduction
Cities’ visual diversity is astounding. Indeed, when comparing their spatial form, marked
differences can be clearly observed at all scales. And yet, despite these variations, their
heterogeneous fabrics share geometric characteristics, which make it possible to compare
them to one another through the analysis of their constituent elements and, to recognise
patchworks of distinct urban tissues within each city.
The endeavour of capturing these multifaceted spatial patterns has been the object of
investigation across multiple disciplines. Notably, building on research in geography (Conzen,
1960) and architecture (Muratori, 1959), the discipline of urban morphology devote over 60
years to explore recurrent patterns within urban forms in cities all over the world, aiming at
their definition, classification and characterisation (Kropf 1993, 2014; Oliveira 2016).
Further research has focused on classification of morphological elements into “types”. This
includes the series of works by Steadman (Steadman, Bruhns and Holtier, 2000; Steadman,
Evans and Batty, 2009) on the classification of buildings based on a handful of empirically
measured geometrical parameters as well as the work by Marshall (2005) on the classification
of street pattern types.
5
And whilst these contributions are heterogeneous both in terms of object of interest (i.e.
building, street, urban tissue), method (i.e. qualitative vs quantitative) and aim of the
classification (i.e. energy performance, historical origin, design paradigm), they mark
important attempts at classifying the variations of individual elements – buildings (Steadman
et al. 2000, Steadman et al. 2009) – or aggregations of individual elements - street patterns
(Marshall, 2005) – making up the of spatial form of cities through geometrical analysis. As
such they mark steps towards a more rigorous study of relationships between different urban
configurations.
Yet, our current capacity to systematically capture the heterogeneity of spatial patterns remains
limited. Most existing research in urban morphology relies on highly-supervised, expert-driven
and labour-intensive qualitative methods both in the data preparation process and in the design
of the analysis. As a result, most existing works are hardly scalable due to the considerable
amount of manual work required to prepare the input data and tend to focus on the analysis of
relatively few spatial parameters.
Recently however, advances in geographic data science, combined with growing availability of
geospatial data, triggered a data-driven stream of urban morphology studies, named “urban
morphometrics” (e.g. Gil et al. 2012, Dibble et al. 2019, Araldi & Fusco 2019, Bobkova 2019).
Within this line of research, the paper aims to address the need for more systematic, scalable
6
and efficient method for the detection and classification of morphological patterns. To this end,
after presenting a brief literature review on urban form classification and specifying the
requirements for a rigorous classification method, we
● present an original quantitative methodology for the systematic unsupervised
classification of urban form patterns and ground it on the theory of phenetics and
numerical taxonomy in biological systematics.
● apply the proposed methodology to two exploratory case studies, as proofs of concept
aimed at providing an illustration of the method and some of its potential theoretical
impacts and technical shortcomings.
More specifically, we will first frame the proposed approach to urban form classification
within numerical taxonomy, which seeks to describe and classify species and taxa based on
morphological similarity (Sneath & Sokal, 1973). To build this methodological parallel
between the (a-biotic) system of urban form and biology, we a) re-frame the constituent
elements of urban forms as the building blocks of the method, 2) describe how to identify
structurally homogeneous urban form types (or “taxa”) and 3) measure their hierarchical
relationship based on phenetic similarity, delivering a systematic numerical taxonomy of
urban form. Finally, we test the proposed method on two major European cities characterised
7
by various types of urban fabric originating from different historical stages: Prague, CZ and
Amsterdam, NL.
We conclude discussing validation findings, highlighting potential theoretical impact of the
proposed method and discussing methodological limitations.
Existing models of urban form classification
The primary aim of classification is to reduce the complexity of the world around us. Many
urban form classification methods exist at building (Steadman et al, 2000, Steadman et al.
2009, Schirmer & Axhausen, 2015), street (Marshall, 2005) neighbourhood (Soman et al.,
2020) and city (Louf & Barthelemy, 2014) scales, varying conceptually and analytically both
in terms of focus scale - e.g. global, (Angel et al. 2012) vs local (Guyot et al. 2021), analytical
approach – e.g. quantitative vs. qualitative, and aim of the classification. Structurally, the
simplest forms involve flat classifications, where the relationship between types is unknown.
These are either binary like organized vs. unorganized neighbourhoods (Dogrusoz & Aksoy,
2007), or multi-class, as Caruso et al.’s (2017) 4-class clustering based on inter-building
distance, or Song and Knapp’s (2007) 6-class neighbourhood typology based on factor
analysis and K-means of 21 spatial descriptors, or the “multiscale typology” by Schirmer &
Axhausen, (2015) identifying four flat classes based on centrality and accessibility. More
complex classifications involve hierarchical methods (taxonomies), which organise classes
8
based on their mutual relationships like Serra et al. (2018)’s hierarchical taxonomy of
neighbourhoods built according to 12 morphological characters of street network, blocks and
buildings, and the work by Dibble et al. (2019) who hierarchically classify portions of urban
area enclosed by main streets. More granular approaches include the work by Araldi & Fusco
(2019), who classify street segments using 21 morphometric characters derived from street
networks, building footprints and digital terrain model and research by SMOG at Chalmers
University (Berghauser Pont et al., 2019a; Berghauser Pont et al., 2019b; Bobkova et al.,
2019) that classifies morphological elements of plots, streets and buildings through a handful
of morphometric characters.
Other approaches employ morphometric assessment to predict pre-defined typologies of
buildings, streets or larger areas (Marshall, 2005, Hartmann et al., 2016; Neidhart and Sester,
2004; Steiniger et al., 2008; Wurm et al., 2016). These validate morphometrics in
classification of urban form, even though the typology itself is defined differently. Related to
this are Urban Structural Type classifications reviewed by Lehner & Blaschke (2019), and
detection of Local Climate Zones (Stewart & Oke, 2012; Taubenböck et al., 2020).
Whilst the list does not aim to be exhaustive of all contributions it nevertheless provides an
overview of the state of the art in urban form classification research. Specifically, it highlights
how each of these method shows shortcomings in scalability (the ability to analyse large areas
9
while retaining the detail), transferability (the ability to apply to different contexts),
robustness (the ability to remain unaffected by small imprecision of the input data or
measurement), and extensiveness (i.e. the bias induced by a small number of variables), or
interpretative flexibility (i.e., missing relations between classes). This leaves a methodological
gap in morphometric classification of built environment hindering the development of
universal taxonomy of urban form.
Method: Building a taxonomy of urban form
The problem of classification of urban patterns based on geometrical resemblance is not
dissimilar, conceptually speaking, to the work of early biologists seeking to classify biotic
species and taxa based on morphological similarity. This was indeed the primary aim of
numerical taxonomy (and generally phenetics), established in biology in the second half of the
20th century (Sneath & Sokal, 1973).
Whilst DNA sequencing and phylogenetics have now largely replaced morphometrics in
modern biological taxonomy, we can take advantage of the latter for the study of urban form.
Very much like the study of organismal phenotypes and the statistical description of
biological forms were instrumental to the separation of individuals (and species) into
recognisable, homogeneous groups (Raup,1966), extending numerical taxonomy to the study
10
of urban form offers an operationally viable and reliable conceptual and methodological
framework for a systematic classification of homogeneous urban form types.
And yet, whilst this possibility has always fascinated urban scholars in an analogic sense
(Philip and Steaman, 1979), a rigorous methodological parallel between numerical taxonomy
and urban form classification is a matter of pioneering research.
One of the first authors to explicitly use numerical taxonomy on urban form was Dibble et al.
(2019) who, notwithstanding operational limitations, measured a large number of geometrical
parameters of fundamental morphological elements (buildings, streets, plots etc) to test the
applicability of the approach in urban morphology. However, their method requires
predefined boundaries of urban types, is extremely data demanding and is not possible to do
without manual measuring. Despite that, it paved the conceptual way for further research
including the one presented in this paper.
Morphometrics and numerical taxonomy in urban form
The first step for numerical taxonomy of urban form is the definition of the building blocks of
the method, namely: 1) structural elements, or the urban form counterpart of the individual
and its body in biology (Sneath & Sokal, 1973); 2), operational taxonomic unit (OTU), or else
the unit forming the lowest ranking taxa, which in biology is individuals or populations

11
depending on taxonomic level; and 3) morphometric characters, that is the measurable traits
of each structural elements - the “wing’s length” or “beak’s dimension” in biology.
Structural elements
Urban morphologists generally agree on three fundamental elements: buildings, plots and
streets (Kropf, 2017; Moudon, 1997). To make our method scalable it is imperative that, when
these are translated into operational and measurable morphometric elements, i.e., vector
features in GIS data, they maintain their meaning with minimal data input, hence maximising
data accessibility and consistency.
From a morphometric standpoint, this is relatively straightforward for streets and buildings
due to their conceptual simplicity: buildings can be represented as building footprint polygons
(with the attribute of building height) at Level of Detail 1 (Biljecki et al., 2016) whilst streets
as network centrelines, cleared of transport planning-related structures. The same is more
complicated for the plot, particularly at large scale, due to its highly polysemic nature (Kropf,
2018) and ambiguous structuring role in contemporary urban fabrics (Levy, 1999).
To avoid the plot’s inconsistencies, we use morphological tessellation, a polygon-based
derivative of Voronoi tessellation obtained from building footprints proposed by Fleischmann
et al. (2020) after Hamaina et al. (2012) and Usui & Asami (2013) and the morphological cell,
its smallest spatial unit which delineates the portion of land around each building that is closer

12
to it than to any other but no further than 100m. As such, the morphological tessellation
captures the topological relations between individual cells and influence that each building
exerts on the surrounding space (Hamaina et al., 2012), regardless of historical origin, thanks
to its contiguity throughout the analysis space (figures 1a and 2). Furthermore, being
generated solely from building footprints, it does not increase data reliance. However, as such,
it does not have the ability to represent unbuilt areas and empty plots and does not serve as a
substitute for plot in general terms as it does not have the same structural role. Morphological
tessellation is a purely analytical element.
13
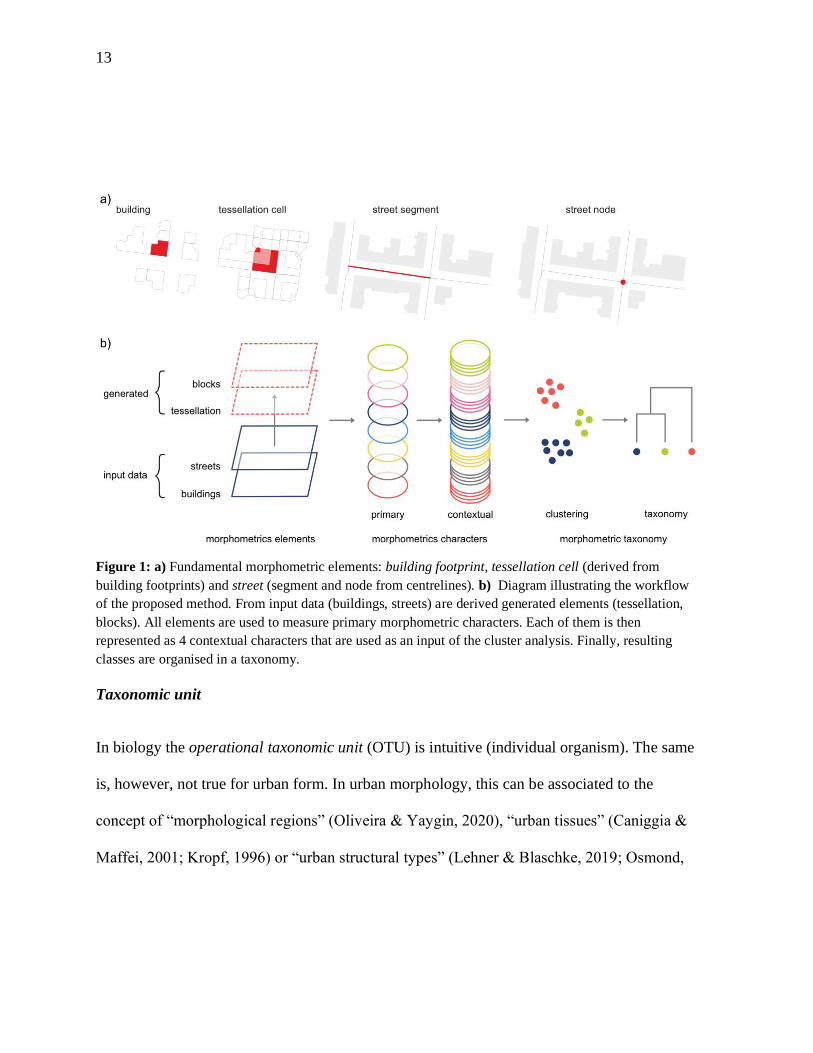
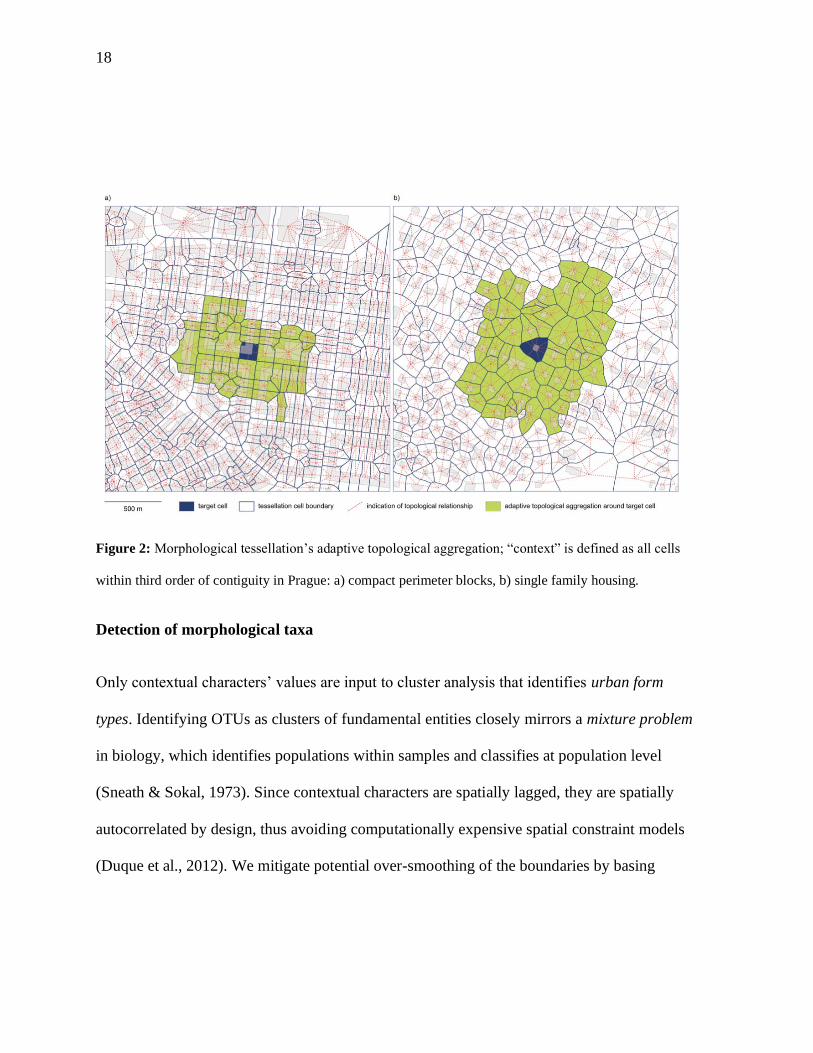
Figure 1: a) Fundamental morphometric elements: building footprint, tessellation cell (derived from
building footprints) and street (segment and node from centrelines). b) Diagram illustrating the workflow
of the proposed method. From input data (buildings, streets) are derived generated elements (tessellation,
blocks). All elements are used to measure primary morphometric characters. Each of them is then
represented as 4 contextual characters that are used as an input of the cluster analysis. Finally, resulting
classes are organised in a taxonomy.
Taxonomic unit
In biology the operational taxonomic unit (OTU) is intuitive (individual organism). The same
is, however, not true for urban form. In urban morphology, this can be associated to the
concept of “morphological regions” (Oliveira & Yaygin, 2020), “urban tissues” (Caniggia &
Maffei, 2001; Kropf, 1996) or “urban structural types” (Lehner & Blaschke, 2019; Osmond,
14
2010), or else “a distinct area of a settlement in all three dimensions, characterized by a
unique combination of streets, blocks/plot series, plots, buildings, structures and materials
and usually the result of a distinct process of formation at a particular time or period” (Kropf
2017, p.89).
From a morphometric standpoint, adopting the concept of “urban tissue” as the OTU has two
main advantages. First, being grounded on the notion of homogeneity, its definition can be
configured as a typical problem of cluster analysis: homogeneous urban tissues are hence
derived from the analysis of recurrent similarities/differences in the morphometric characters
of their constituent urban elements. Furthermore, as size and geometry of each urban tissue
are determined by internal homogeneity rather than pre-defined boundaries, the Modifiable
Aerial Unit Problem is minimised (Openshaw, 1984).
Having the elements defined, the method proposed here can be split into five consecutive
steps illustrated on figure 1b: 1) generation of morphological elements, 2) measurement of
primary morphometric characters, 3) measurement of contextual character, 4) cluster analysis,
5) taxonomy. The remaining steps are outlined in the following sections.
Morphometric characters
The definition of measurable morphometric characters is key for cluster analysis and captures
the cross-scale structural complexity of different urban tissues. To this end, building on earlier
15
literature review <masked for review>, we use six categories of morphometric characters -
dimension, shape, spatial distribution, intensity, connectivity, diversity.
These characters allow to numerically describe morphometric elements (street segments,
building footprints and tessellation cells) within any urban fabric, by capturing the
relationships between them and their immediate surroundings. They are measured at three
topological scales: small (element itself), medium (element and its immediate neighbours) and
large – the element and its neighbours within k-th order of contiguity. Spatial contiguity can
either be kept constrained by enclosing streets (the equivalent of an urban block) or left
unconstrained (see the Supplementary Material 1 for further details).
Considered morphometric characters are of two types: primary and contextual. Primary
characters measure geometric and configurational properties of morphometric elements
(buildings, streets and cells) and their relationships (at all scales). By abundantly representing
all six morphometric categories this set is extensive. Accordingly, starting from as broad a set
of unique variables identified by <masked for review>, we shortlist 74 characters (table S1 in
the Supplementary Material), following rules by Sneath & Sokal (1973) to minimise potential
collinearity and limit redundancy of information, while retaining the universality of the
method.
16
Primary characters describe morphometric elements and their immediate neighbourhood
rather than their spatial patterns. As such, when employed for cluster analysis they may result
in spatially discontinuous classes. Urban tissues are defined by their internal homogeneity, but
it can, and often is, be the homogeneity of heterogeneity. In other words, the tissue may be
defined by the combination of small and large buildings or various shapes, and we need to
capture these characteristics. Thus we derive a set of spatially lagged contextual characters
describing the tendency of each primary character in its context. The term “context” is here
defined as topological aggregation of morphological cells within three topological steps from
each given cell Ci, an empirically determined value large enough to capture a cohesive pattern
over a relatively wide spatial extent but small enough to generate sharp boundaries between
different patterns (Figure 2). The notion of “tendency” is in turn quantified through four
values:
1. Interquartile mean (IQM), the most representative value cleaned of the effect of
potential outliers.
2. Interquartile range (IQR); as local measure of statistical dispersion, describes the
range of values cleaned of outliers:
𝐼𝑄𝑅𝑐ℎ = 𝑄3𝑐ℎ − 𝑄1𝑐ℎ,
where 𝑄3𝑐ℎ and 𝑄1𝑐ℎ are is the third and quartiles of the primary character.

17
3. Interdecile Theil index (IDT), describes the local (in)equality of distribution of values:
𝐼𝐷𝑇𝑐ℎ = ∑𝑛𝑖=1 (
𝑐ℎ𝑖
∑𝑛𝑖=1 𝑐ℎ𝑖𝑙𝑛[𝑁
𝑐ℎ𝑖
∑𝑛𝑖=1 𝑐ℎ𝑖]),
where 𝑐ℎ is the primary character.
4. Simpson’s diversity index (SDI), captures the local presence of classes of values
compared to the global structure of the distribution:
𝑆𝐷𝐼𝑐ℎ =∑𝑅𝑖=1 𝑛𝑖(𝑛𝑖−1)
𝑁(𝑁−1),
where 𝑅 is richness, expressed as number of bins, 𝑛𝑖 is the number of features within i-
th bin and N is the total number of features.
Of these, the first captures the local central tendency and the latter three the distribution of
values within third order of contiguity from each cell.
Each primary character is used as an input for each contextual option. The full set of
morphometric characters hence includes 74 primary plus 296 contextual characters (74x4),
totalling 370 characters. These are computed using the bespoke open-source Python toolkit
<masked for review>, ensuring the full replicability and reproducibility of the method.
18
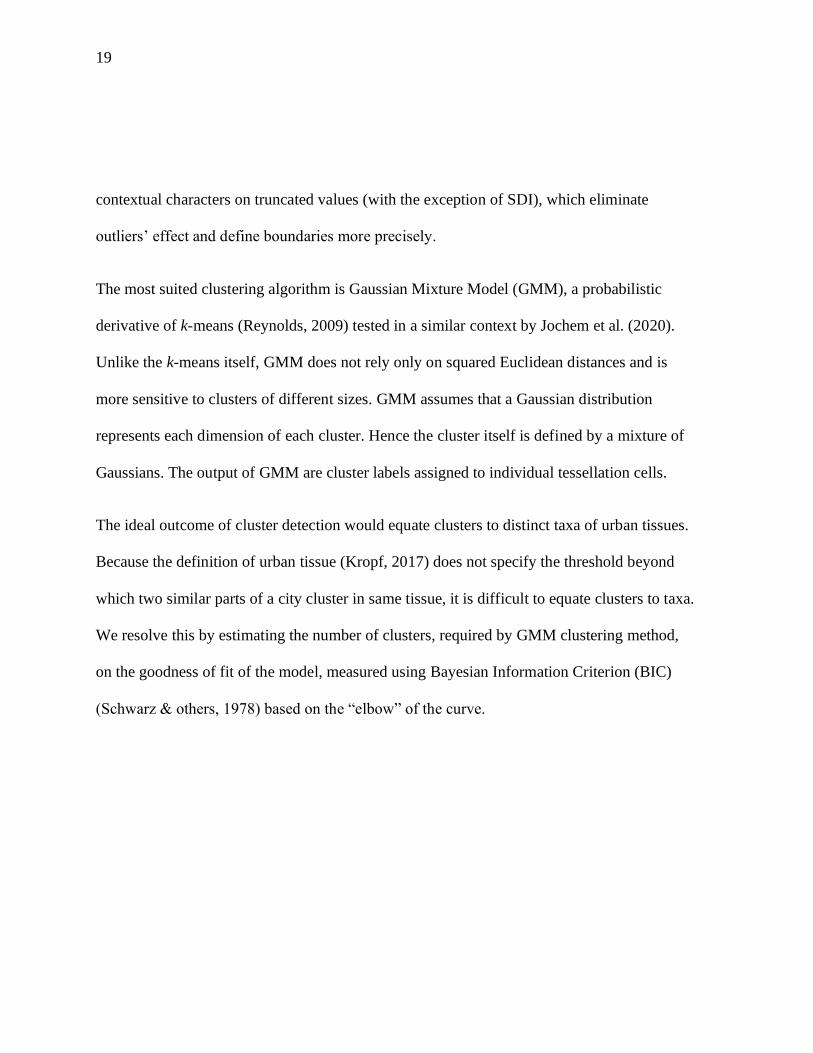
Figure 2: Morphological tessellation’s adaptive topological aggregation; “context” is defined as all cells
within third order of contiguity in Prague: a) compact perimeter blocks, b) single family housing.
Detection of morphological taxa
Only contextual characters’ values are input to cluster analysis that identifies urban form
types. Identifying OTUs as clusters of fundamental entities closely mirrors a mixture problem
in biology, which identifies populations within samples and classifies at population level
(Sneath & Sokal, 1973). Since contextual characters are spatially lagged, they are spatially
autocorrelated by design, thus avoiding computationally expensive spatial constraint models
(Duque et al., 2012). We mitigate potential over-smoothing of the boundaries by basing
19
contextual characters on truncated values (with the exception of SDI), which eliminate
outliers’ effect and define boundaries more precisely.
The most suited clustering algorithm is Gaussian Mixture Model (GMM), a probabilistic
derivative of k-means (Reynolds, 2009) tested in a similar context by Jochem et al. (2020).
Unlike the k-means itself, GMM does not rely only on squared Euclidean distances and is
more sensitive to clusters of different sizes. GMM assumes that a Gaussian distribution
represents each dimension of each cluster. Hence the cluster itself is defined by a mixture of
Gaussians. The output of GMM are cluster labels assigned to individual tessellation cells.
The ideal outcome of cluster detection would equate clusters to distinct taxa of urban tissues.
Because the definition of urban tissue (Kropf, 2017) does not specify the threshold beyond
which two similar parts of a city cluster in same tissue, it is difficult to equate clusters to taxa.
We resolve this by estimating the number of clusters, required by GMM clustering method,
on the goodness of fit of the model, measured using Bayesian Information Criterion (BIC)
(Schwarz & others, 1978) based on the “elbow” of the curve.
20
The foundation of taxonomy
To classify urban form types, we use Ward's minimum variance hierarchical clustering
previously applied in urban morphology (Dibble et al., 2019; Serra et al., 2018). Here, each
urban form type is represented by its centroid (mean of each character across cells with the
same label); Ward's algorithm links observations reducing increase in total within-cluster
variance (Ward Jr, 1963). The classification is represented through a dendrogram capturing
the cophenetic relationship between observations (i.e., morphometric similarity), forming the
foundation of our taxonomy.
Validation theory
For validation, we study our taxonomy in relation to other urban dynamics with which some
form of relation is expected. In urban morphology theory and qualitative evidence suggests
that different urban patterns emerge in areas of different historical origins or else belonging to
different “morphological periods” (Whitehand et al., 2014). This notion has also been
observed quantitatively in the urban fabric (Boeing, 2020; Dibble et al., 2019; Porta et al.,
2014, <masked>) as well as in land use patterns (Castro et al., 2019) of cities and is inherently
embedded in our OTU.
We validate our classification against three datasets: 1) historical origins; 2) predominant
land-use patterns, and 3) qualitative classification of urban form adopted in official planning
21
documents. We use the same method, based on cross-tabulation, resulting in statistical
analysis using chi-squared statistic and related Cramér’s V (Agresti, 2018). The model is
considered valid if a significant relationship is found between proposed classification and
three additional datasets and if similar performance is shown across different case studies.
Case study
We test the proposed method in two historical European cities: Prague, CZ and Amsterdam,
NL. Prague’s analysis area is defined by its administrative boundary, which extends beyond
its continuous built-up area to minimise the “edge-effect” of the street network (Gil, 2016).
Amsterdam’s analysis area is defined by its contiguous urban fabric, extending beyond the
city’s administrative boundary. The morphological data (buildings, streets) for Prague case
study were obtained from city’s open data portal (https://www.geoportalpraha.cz/en), while
the validation layers were provided by Prague Institute of Planning and Development. The
morphological data for Amsterdam are obtained from 3D BAG repository (Dukai, 2020) and
Basisregistratie Grootschalige Topografie(http://data.nlextract.nl/)
22
Results: Taxonomy of Prague and Amsterdam
We measure all 74 primary characters in both Prague and Amsterdam, associated to each
morphological cell, and subsequently generate 296 contextual characters as input to cluster
analysis.
Cluster analysis in Prague
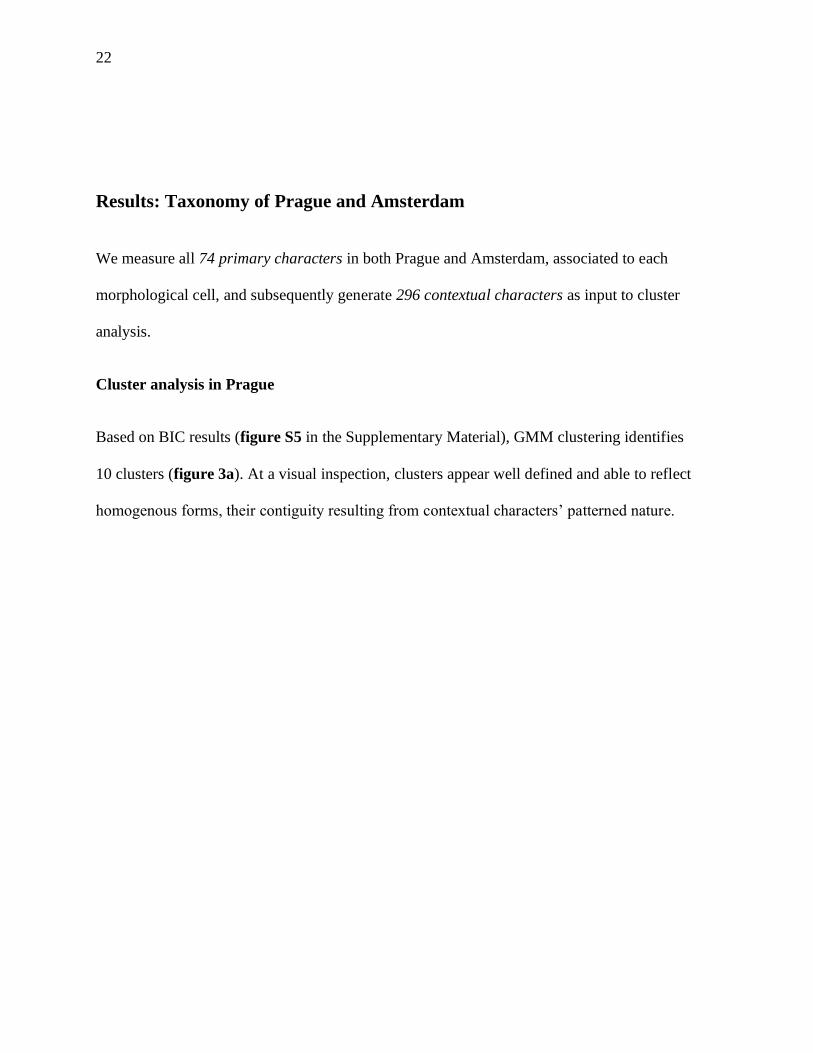
Based on BIC results (figure S5 in the Supplementary Material), GMM clustering identifies
10 clusters (figure 3a). At a visual inspection, clusters appear well defined and able to reflect
homogenous forms, their contiguity resulting from contextual characters’ patterned nature.

23
Figure 3: Spatial distribution of detected clusters in central Prague (a) and central Amsterdam (b)
accompanied by dendrograms representing the results of Ward’s hierarchical clustering of urban form types
in Prague (c) and Amsterdam (d). The y-axis shows the cophenetic distance between individual clusters,
i.e., their morphometric dis-similarity. The full extent of case studies is shown in figures S7 and S8 in the
Supplementary Material.

24
Starting from the historical core of Prague (top left), we first identify the medieval urban form
(7), then the compact perimeter blocks of Vinohrady neighbourhood (6,), and the fringe areas
(3). Towards South and East, we note low-rise tissues (8, 1) and modernist developments (4).
Drawing purely from visual observation and personal knowledge of the city of Prague,
identified clusters appear to nicely capture meaningful urban form types.
Cluster analysis in Amsterdam
In Amsterdam, BIC indicates the optimal number being 10 clusters, similarly to Prague.
As in Prague, the geography of clusters shows seemingly meaningful results (figure 3b). For
example, cluster 7 captures the city’s historical core up to the Singelgracht canal. The cluster
1 reflects well-known shifts in planning paradigms with the rise of New Amsterdam School
(Panerai et al., 2004) forming the early 20th century south expansion. Once again, under
preliminary observation, identified clusters capture meaningful spatial patterns.
Numerical taxonomy
The centroid values of each cluster, obtained as mean value of each contextual character, are
used as taxonomic characters in Ward’s hierarchical clustering. Resulting relationship
between centroids represents relationship between clusters (figure 3c). The dendrogram’s
horizontal axis represents detected clusters, while the vertical axis their cophenetic distance

25
(i.e., morphological dissimilarity ): the lower the connecting link of two clusters, the higher
their similarity.
Prague’s dendrogram contains 10 clusters, illustrating the uniqueness of the spatial pattern of
medieval city (7), forming the first bifurcation and independent branch. The similar situation
is with cluster covering industrial areas (0) being dissimilar to other clusters. Further in the
dendrogram, we can see branches with regular perimeter blocks (6) and their fringe areas (3),
unorganised development of modern era (4, 2) or a branch featuring residential areas of low
density (9, 1, 5, 8).
The dendrogram of Amsterdam urban form (figure 3d) shows similar characteristics, with
bifurcations distinguishing nested levels of spatial variations.
In the classification maps shown in figure 3,types are colour-coded to highlight distinctions at
individual cluster’s level. However, we can instead colour-code according to clusters’
similarity. Because the dendrogram shows several major bifurcations at different levels of
cophenetic distance indicating distinct higher-order groups of clusters, by colouring each
cluster in the map according to the branch it belongs to in the dendrogram and using different
hues to distinguish between lower-level clusters in each branch, we distinguish hierarchies
based on cophenetic distance.

26
We can further combine the two cities’ clusters in one shared dendrogram (figure 4c). Urban
form types from both pools appear regularly distributed in the lowest orders of the tree,
showing a similar spatial structure emerging in both cases. Remarkably, we can see the major
bifurcation setting apart industrial urban forms in the combined taxonomy.
A lower order bifurcation within the main branch distinguishes between dense/compact urban
form and the rest. Further lower-level subdivisions are also visible. Compared to individual
ones, the combined tree shows some differences in branching: a few clusters are reshuffled
and the branches themselves are slightly reorganised. This is likely to happen as more and
more cities are analysed until the unified taxonomy reaches a “plateau” when enough cases
are included, ultimately producing a ‘general taxonomy of urban form’.

27
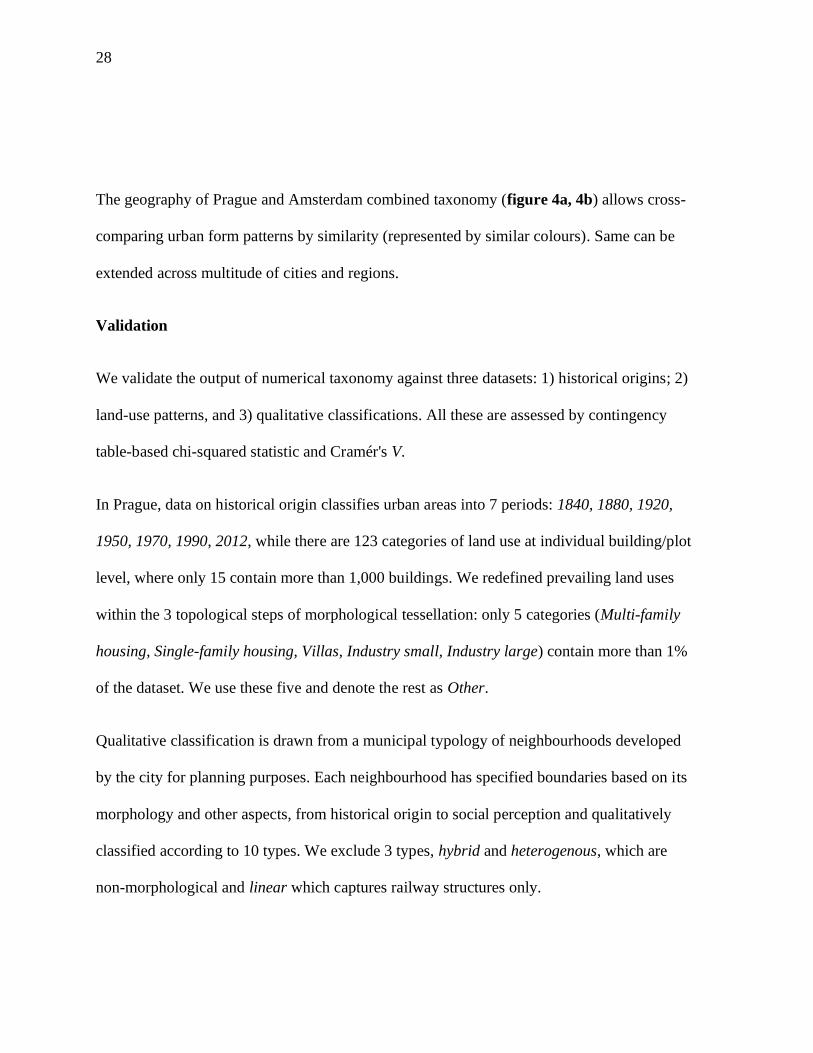
Figure 4: Spatial distribution of different branches of the combined dendrogram in central Prague (a) and
central Amsterdam (b) accompanied by the dendrogram representing the results of Ward’s hierarchical
clustering of urban form types from a combined pool of Prague and Amsterdam (c). The y-axis shows
cophenetic distance between individual clusters, i.e. their morphometric dis-similarity. Branches are
interpretatively coloured - the colours are then used on maps illustrating spatial distribution of these
branches. The full extent of case studies is shown in figures S9 and S10 in the Supplementary Material.
28
The geography of Prague and Amsterdam combined taxonomy (figure 4a, 4b) allows cross-
comparing urban form patterns by similarity (represented by similar colours). Same can be
extended across multitude of cities and regions.
Validation
We validate the output of numerical taxonomy against three datasets: 1) historical origins; 2)
land-use patterns, and 3) qualitative classifications. All these are assessed by contingency
table-based chi-squared statistic and Cramér's V.
In Prague, data on historical origin classifies urban areas into 7 periods: 1840, 1880, 1920,
1950, 1970, 1990, 2012, while there are 123 categories of land use at individual building/plot
level, where only 15 contain more than 1,000 buildings. We redefined prevailing land uses
within the 3 topological steps of morphological tessellation: only 5 categories (Multi-family
housing, Single-family housing, Villas, Industry small, Industry large) contain more than 1%
of the dataset. We use these five and denote the rest as Other.
Qualitative classification is drawn from a municipal typology of neighbourhoods developed
by the city for planning purposes. Each neighbourhood has specified boundaries based on its
morphology and other aspects, from historical origin to social perception and qualitatively
classified according to 10 types. We exclude 3 types, hybrid and heterogenous, which are
non-morphological and linear which captures railway structures only.

29
Differently from Prague, the Amsterdam dataset of historical origin (Dukai, 2020) indicates
each building’s year of construction, starting with 1800, rather than area/plot’s first
settlement. To ensure data compatibility with the method and avoid issues with pre-1800
periods, origin dates are binned into 11 groups following Spaan and Waag Society (2015).
The resulting chi-squared and Cramér's V values are reported in table S7. Contingency tables
are available as tables S3 – S6. All tests indicate moderate to high association between
identified clusters and the 3 sets of validation data, supporting model’s validity.
Historical origin shows moderate association in both Prague (V=0.331) and Amsterdam
(V=0.311). Because of the nature of data, where period of first development is not the only
driver of form and we have tissues – e.g. single-family – populating multiple historical
periods, a moderate association is expected. Land use (V=0.468) and municipal qualitative
classification (V=0.674), tested only in Prague, indicate moderate and high association to
clusters. Again, since land use is only a partial driver of urban form, moderate association
supports the proposed method’s potential to capture urban reality. Furthermore, relationship
between morphometric types and qualitative ones sourced from local authority is the highest
among validation data, reaching V=0.674. This seems encouraging, since both classifications
aim to capture a similar conceptualisation of the built environment.

30
Discussion
The proposed method hierarchically classifies urban form types according to the similarity of
their morphological traits. It is numerical, unsupervised, rich in information and scalable in
spatial extent. It identifies clusters of urban form as distinct urban form types and, within
each, contiguous urban tissues, reflecting that in a typical city we observe tissues belonging to
the same type. The method is parsimonious in terms of input data, requiring only building
footprints (and height) and street networks, to generate three morphometric elements
(building units, street network, morphological tessellation) and to compute the 370
morphometric characters. Such a wealth of fine-grained information allows extensively
characterising each building in the study area and its adjacency and deriving distinct urban
form types hierarchically organised according to similarity.
The method allows urban form analysis both in detail and at large scale, hence overcoming a
methodological gap; it is fully data-driven and does not rely on (but confirms) experts’
judgement other than for interpretation of BIC score. It is structurally hierarchical, which
ensures depth along the similarity structure of urban form types and flexibility of use,
according to the desired resolution of classification. Furthermore, it is extensive,
encompassing a broad range of morphometric descriptors between major urban form
31
components and their context; and it is granular, since morphometric characters are referred
to each individual building.
Finally, it is scalable and reproducible, in that it is designed to suite well the large scale of
coverage - like cities and combinations of cities - and its source code is available open-source.
Information generated with the proposed method supports applications at three different
levels. First, the set of morphometric characters can be input to studies of a relationship
between urban form and socio-economic aspects of urban life, e.g. via regression analysis.
This includes investigations into the link between urban form and energetic/bioclimatic
performance of cities, population health, gentrification and place attractiveness. Second, flat
clustering with morphometric profiles can provide aggregated information on patterns without
dealing with individual characters. This makes it possible to capture the overall morphological
“identity” of an urban tissue rather than focusing on one element at the time. Third, the
taxonomy brings hierarchy into classification and, as such, it can adapt its resolution to fit any
question asked. In this sense, while the results of the clusters may be well-suited for fine-
grained spatial analyses, by horizontally cutting the dendrogram at a desired height, it is
possible to group clusters into fewer, more generalised spatial aggregations which might be
better suited for analyses at coarser resolution.
32
Whilst parsimonious in terms of input data, our method still relies on their availability and
consistency. The building footprints layer is often of sub-optimal quality level: adjacent
buildings may be represented as unified polygons, misleading the method in dense areas.
Building-level information on height may not be available, reducing depth of information
with potentially negative effects on the quality of resulting clusters. Consistency of data
across geographies may also be an issue, particularly for large spatial extents, which may
require data generated independently by multiple sources.
Conclusions
The paper presents an original data-driven approach for the systematic unsupervised
classification and characterisation of urban form patterns grounded on numerical taxonomy in
biological systematics and which clusters urban tissues based on phenetic similarity, delivering
a systematic numerical taxonomy of urban form. More specifically it measures a selection of
74 primary characters from input data (buildings, streets) and derived generated elements
(tessellation and blocks), each of which is represented through 4 contextual characters
(Interquartile mean, Interquartile range, Interdecile Theil index, Simpson’s diversity index).
These are then used as an input of the cluster analysis, resulting in a hierarchical taxonomy.
Finally, the proposed approach is validated through two exploratory case studies illustrating
33
how the resulting clustering show significant relationship with validation data reflecting other
urban spatial dynamics.
Urban morphometrics and proposed classification method represent a step towards the
development of a taxonomy of urban form and opens to scalable urban morphology. By
overcoming existing limitations in the systematic detection and characterisation of
morphological patterns, the proposed approach opens the way to the large-scale classification
and characterisation of urban form patterns, potentially resulting, if applied to a substantial pool
of cities, in a universal taxonomy of urban form.
At the same time, the proposed approach also provides valuable tools for more rigorous
comparative studies, which are fundamental to highlight similarities and differences in urban
forms of different urban settlements in different contexts, and to explore the relationship
between urban space and phenomena as diverse as environmental performance, health and place
attractiveness and more.

34
References
● Agresti A (2018) An Introduction to Categorical Data Analysis. John Wiley & Sons.
● Angel S, Blei AM, Civco DL and Parent J (2012). Atlas of urban expansion. Lincoln
Institute of Land Policy Cambridge, MA.
● Araldi A and Fusco G (2019) From the street to the metropolitan region: Pedestrian
perspective in urban fabric analysis: Environment and Planning B: Urban Analytics
and City Science 46(7): 1243–1263. DOI: 10.1177/2399808319832612.
● Berghauser Pont M, Stavroulaki G and Marcus L (2019a) Development of urban types
based on network centrality, built density and their impact on pedestrian movement.
Environment and Planning B: Urban Analytics and City Science 46(8): 1549–1564.
DOI: 10/gghf42.
● Berghauser Pont M, Stavroulaki G, Bobkova E, et al. (2019b) The spatial distribution
and frequency of street, plot and building types across five European cities.
Environment and Planning B: Urban Analytics and City Science 46(7): 1226–1242.
DOI: 10/gf8x8j.

35
● Biljecki F, Ledoux H and Stoter J (2016) An improved LOD specification for 3D
building models. Computers, Environment and Urban Systems 59: 25–37. DOI:
10/f83fz4.
● Bobkova E, Berghauser Pont M and Marcus L (2019) Towards analytical typologies
of plot systems: Quantitative profile of five European cities. Environment and
Planning B: Urban Analytics and City Science: 239980831988090. DOI: 10/ggbgsm.
● Boeing G (2020) Off the grid… and back again? The recent evolution of american
street network planning and design. Journal of the American Planning Association.
Taylor & Francis: 1–15. DOI: 10/ghf423.
● Caniggia G and Maffei GL (2001) Architectural Composition and Building Typology:
Interpreting Basic Building. Firenze: Alinea Editrice.
● Caruso G, Hilal M and Thomas I (2017). Measuring urban forms from inter-building
distances: Combining MST graphs with a Local Index of Spatial Association.
Landscape and Urban Planning, 163, 80–89.
● Castro KB de, Roig HL, Neumann MRB, et al. (2019) New perspectives in land use
mapping based on urban morphology: A case study of the Federal District, Brazil.
Land Use Policy 87: 104032. DOI: 10.1016/j.landusepol.2019.104032.
36
● Conzen M (1960) Alnwick, Northumberland: A Study in Town-Plan Analysis. London:
George Philip & Son. Available at: http://www.jstor.org/stable/pdf/621094.pdf.
● Dibble J, Prelorendjos A, Romice O, et al. (2019) On the origin of spaces:
Morphometric foundations of urban form evolution. Environment and Planning B:
Urban Analytics and City Science 46(4): 707–730. DOI: 10.1177/2399808317725075.
● Dogrusoz E and Aksoy S (2007) Modeling urban structures using graph-based spatial
patterns. In: 1 January 2007, pp. 4826–4829. IEEE. DOI:
10.1109/IGARSS.2007.4423941.
● Dukai B (2020) 3D Registration of Buildings and Addresses (BAG) / 3D
Basisregistratie Adressen en Gebouwen (BAG). 4TU.ResearchData. DOI:
https://doi.org/10.4121/uuid:f1f9759d-024a-492a-b821-07014dd6131c.
● Duque JC, Anselin L and Rey SJ (2012) The max-p-regions problem. Journal of
Regional Science 52(3). Wiley Online Library: 397–419. DOI: 10/cf9h6h.
● Fleischmann M, Feliciotti A, Romice O, et al. (2020) Morphological tessellation as a
way of partitioning space: Improving consistency in urban morphology at the plot
37
scale. Computers, Environment and Urban Systems 80: 101441. DOI:
10.1016/j.compenvurbsys.2019.101441.
● Gil J, Beirão JN, Montenegro N, Duarte, JP (2012) On the discovery of urban
typologies: data mining the many dimensions of urban form. Urban Morphology
16(1): 27–40
● Gil J (2016) Street network analysis ‘edge effects’: Examining the sensitivity of
centrality measures to boundary conditions. Environment and Planning B: Planning
and Design. DOI: 10.1177/0265813516650678.
● Guyot M, Araldi A, Fusco G and Thomas I (2021). The urban form of Brussels from
the street perspective: The role of vegetation in the definition of the urban fabric.
Landscape and Urban Planning, 205, 103947. https://doi.org/10/ghf96c
● Hamaina R, Leduc T and Moreau G (2012) Towards Urban Fabrics Characterization
Based on Buildings Footprints. In: Bridging the Geographic Information Sciences.
Berlin, Heidelberg: Springer, Berlin, Heidelberg, pp. 327–346. DOI: 10.1007/978-3-
642-29063-3_18.
● Hartmann A, Meinel G, Hecht R, et al. (2016) A Workflow for Automatic
Quantification of Structure and Dynamic of the German Building Stock Using Official

38
Spatial Data. ISPRS International Journal of Geo-Information 5(8): 142. DOI:
10/f872vh.
● Jochem WC, Leasure DR, Pannell O, et al. (2020) Classifying settlement types from
multi-scale spatial patterns of building footprints. Environment and Planning B:
Urban Analytics and City Science: 239980832092120. DOI: 10/ggtsbn.
● Kropf K (1993) The definition of built form in urban morphology. University of
Birmingham.
● Kropf K (1996) Urban tissue and the character of towns. URBAN DESIGN
International 1(3): 247–263. DOI: 10.1057/udi.1996.32.
● Kropf K (2014) Ambiguity in the definition of built form. Urban Morphology 18(1):
41–57.
● Kropf K (2017) The Handbook of Urban Morphology. Chichester: John Wiley &
Sons. Available at: http://cds.cern.ch/record/2316422.
● Kropf K (2018) Plots, property and behaviour. Urban Morphology 22(1): 5–14.
● Lehner A and Blaschke T (2019) A Generic Classification Scheme for Urban
Structure Types. Remote Sensing 11(2): 173. DOI: 10.3390/rs11020173.

39
● Levy A (1999) Urban morphology and the problem of the modern urban fabric: some
questions for research. Urban Morphology 3: 79–85.
● Louf R and Barthelemy M (2014) A typology of street patterns. Journal of the Royal
Society Interface 11. DOI: http://dx.doi.org/10.1098/rsif.2014.0924.
● Moudon AV (1997) Urban morphology as an emerging interdisciplinary field. Urban
Morphology 1(1): 3–10.
● Muratori S (1959) Studi per una operante storia urbana di Venezia. Palladio. Rivista di
storia dell’architettura 1959: 1–113.
● Neidhart H and Sester M (2004) Identifying building types and building clusters using
3-D laser scanning and GIS-data. Int Arch Photogramm Remote Sens Spatial Inf Sci
35: 715–720.
● Oliveira V (2016) Urban Morphology: An Introduction to the Study of the Physical
Form of Cities. Cham: Springer International Publishing.
● Oliveira V and Yaygin MA (2020) The concept of the morphological region:
developments and prospects. Urban Morphology 24(1): 18.
● Openshaw S (1984) The Modifiable Areal Unit Problem.
40
● Osmond P (2010) The urban structural unit: Towards a descriptive framework to
support urban analysis and planning. Urban Morphology 14(1): 5–20.
● Porta S, Romice O, Maxwell JA, et al. (2014) Alterations in scale: Patterns of change
in main street networks across time and space. Urban Studies 51(16): 3383–3400.
DOI: 10.1177/0042098013519833.
● Reynolds DA (2009) Gaussian mixture models. Encyclopedia of biometrics 741.
Berlin, Springer. DOI: 10/cqtzqm.
● Schirmer PM and Axhausen KW (2015) A multiscale classification of urban
morphology. Journal of Transport and Land Use 9(1): 101–130. DOI:
10.5198/jtlu.2015.667.
● Schwarz G and others (1978) Estimating the dimension of a model. The annals of
statistics 6(2). Institute of Mathematical Statistics: 461–464.
● Serra M, Psarra S and O’Brien J (2018) Social and Physical Characterization of Urban
Contexts: Techniques and Methods for Quantification, Classification and Purposive
Sampling. Urban Planning 3(1): 58–74. DOI: 10.17645/up.v3i1.1269.
● Sneath PHA and Sokal RR (1973) Numerical Taxonomy. San Francisco: Freeman.
41
● Soman S, Beukes A, Nederhood C, Marchio N and Bettencourt L (2020). Worldwide
detection of informal settlements via topological analysis of crowdsourced digital
maps. ISPRS International Journal of Geo-Information, 9(11), 685.
https://doi.org/10/ghpwqm
● Song Y and Knaap G-J (2007) Quantitative Classification of Neighbourhoods: The
Neighbourhoods of New Single-family Homes in the Portland Metropolitan Area.
Journal of Urban Design 12(1): 1–24. DOI: 10.1080/13574800601072640.
● Spaan B and Waag Society (2015) All buildings in Netherlands shaded by a year of
construction. Available at: https://code.waag.org/buildings/.
● Steadman, P. (1979). The Evolution of Designs Biological Analogy in Architecture
and the Applied Arts.
● Steiniger S, Lange T, Burghardt D, et al. (2008) An Approach for the Classification of
Urban Building Structures Based on Discriminant Analysis Techniques. Transactions
in GIS 12(1): 31–59. DOI: 10.1111/j.1467-9671.2008.01085.x.
● Stewart ID and Oke TR (2012) Local Climate Zones for Urban Temperature Studies.
Bulletin of the American Meteorological Society 93(12): 1879–1900. DOI:
10.1175/BAMS-D-11-00019.1.
42
● Taubenböck H, Debray H, Qiu C, et al. (2020) Seven city types representing
morphologic configurations of cities across the globe. Cities 105: 102814. DOI:
10/gg2jv4.
● Usui H and Asami Y (2013) Estimation of Mean Lot Depth and Its Accuracy. Journal
of the City Planning Institute of Japan 48(3): 357–362.
● Ward Jr JH (1963) Hierarchical grouping to optimize an objective function. Journal of
the American statistical association 58(301). Taylor & Francis Group: 236–244. DOI:
10/fz95kg.
● Whitehand J, Gu K, Conzen MP, et al. (2014) The typological process and the
morphological period: a cross-cultural assessment. Environment and Planning B:
Planning and Design 41(3). SAGE Publications Sage UK: London, England: 512–
533. DOI: 10/f546ck.
● Wurm M, Schmitt A and Taubenbock H (2016) Building Types’ Classification Using
Shape-Based Features and Linear Discriminant Functions. IEEE Journal of Selected
Topics in Applied Earth Observations and Remote Sensing 9(5): 1901–1912. DOI:
10.1109/JSTARS.2015.2465131.
43
Supplementary material
Supplementary Material 1: Relational analytical framework
This research proposes and applies a relational framework of urban form for urban
morphometrics.
Relational analytical framework (RF) of urban form is based on two concepts - topology and
inclusiveness. The framework acknowledges that there are identifiable relations between all
elements of urban form and their aggregations. As such, it accommodates all analytical
aggregations into a singular framework, linking all potential measurable characters to the
smallest element. Furthermore, it employs topological relations in the way it generates
location-based aggregations of fundamental elements.
Unlike existing frameworks in literature, RF is analytical, not conceptual or structural. It does
not try to propose a new theory of urban form; it has purely morphometric nature.
Within this research, RF is operationalised based on morphological tessellation.
The key principles of the tessellation-based relation framework are as follows.
1. Urban form is represented as building footprints, street networks and footprint-based
morphological tessellation.
2. There is an identifiable relationship between buildings and street networks, buildings and
street nodes and buildings and tessellation cells.
3. Morphometric characters are measured on scales defined by topological relations between
elements.
- Element itself
- Element and its immediate neighbours
- Element and its neighbours within n topological steps, either in a constrained or an
unconstrained way.
4. Therefore, we can define subsets of RF as measurable entities of urban form based on
fundamental elements and topological scales.
5. Subsets are overlapping, reusing each element within all relevant relations.
Since the relation between all elements is preserved throughout the process of their
combination, we can always link values measured on one subset to another. For example, due
to the fixed relation between building and street node, we can attach a node's degree value to a
44
building as an element. The constrained topological relation can identify traditional area-
based aggregations like block (as a combination of all tessellation cells which topological
relation does not cross a street). As such, they allow us to combine both area-based and
location-based aggregations while minimising MAUP for each of them.
Subsets of elements
Subsets are a combination of topological scales and fundamental elements. Overlap of
morphometric characters derived from subsets, where each subset is representing a different
structural unit, gives an overall characteristic of each duality building - cell, which can be
later used for further analysis.
We can divide subsets into three topological scales: Small (or Single), Medium and Large.
Note that topological distance is possible to define within each layer (relations between
buildings, relations between cells, relations between edges or nodes), but not as a combination
of layers. The relation between building, its cell, its segment and its node is fixed and seen as
a singular feature. That is why morphometric characters like covered area ratio of the cell are
classified as a Small scale character.
Small/Single (S)
Small scale captures fundamental elements themselves (topological distance is 0 - itself). In
the case of building and tessellation cell, it captures the individual character of each cell. In
the case of street segment and node, it captures value for segment or node, which is then
applied to each cell attached to it.
We have four subsets within small scale:
- building
- tessellation cell
- street segment
- street node

45
Figure S1: Diagrams illustrating the subsets on the small/single scale.
Medium (M)
The medium scale reflects topological distance 1. It captures individual character for each
element derived from the relation to its adjacent elements.
- adjacent buildings
- neighbouring cells
- neighbouring segments
- linked nodes
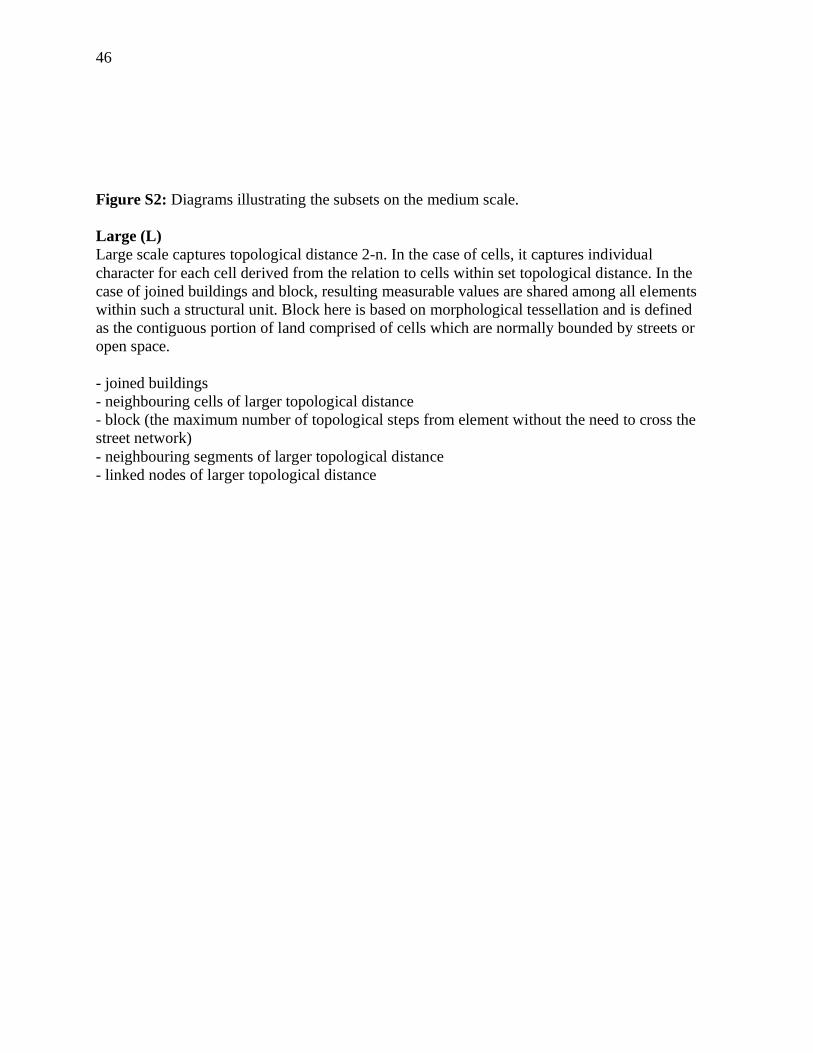
46
Figure S2: Diagrams illustrating the subsets on the medium scale.
Large (L)
Large scale captures topological distance 2-n. In the case of cells, it captures individual
character for each cell derived from the relation to cells within set topological distance. In the
case of joined buildings and block, resulting measurable values are shared among all elements
within such a structural unit. Block here is based on morphological tessellation and is defined
as the contiguous portion of land comprised of cells which are normally bounded by streets or
open space.
- joined buildings
- neighbouring cells of larger topological distance
- block (the maximum number of topological steps from element without the need to cross the
street network)
- neighbouring segments of larger topological distance
- linked nodes of larger topological distance
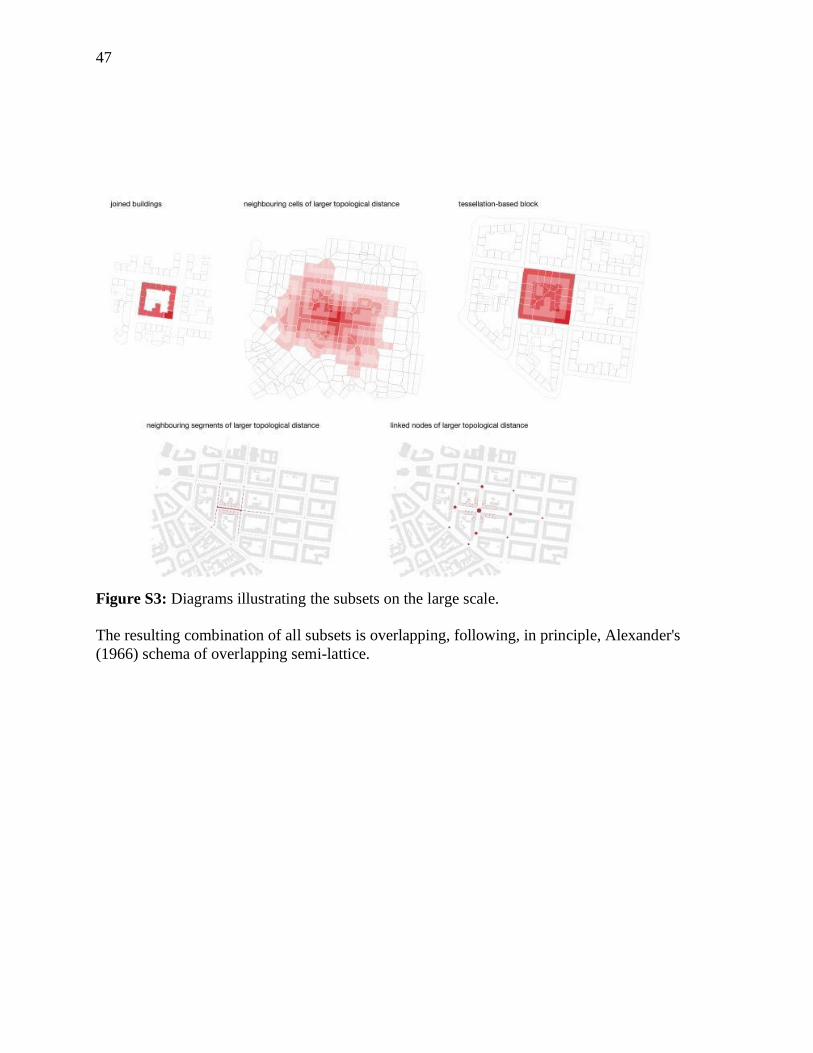
47
Figure S3: Diagrams illustrating the subsets on the large scale.
The resulting combination of all subsets is overlapping, following, in principle, Alexander's
(1966) schema of overlapping semi-lattice.
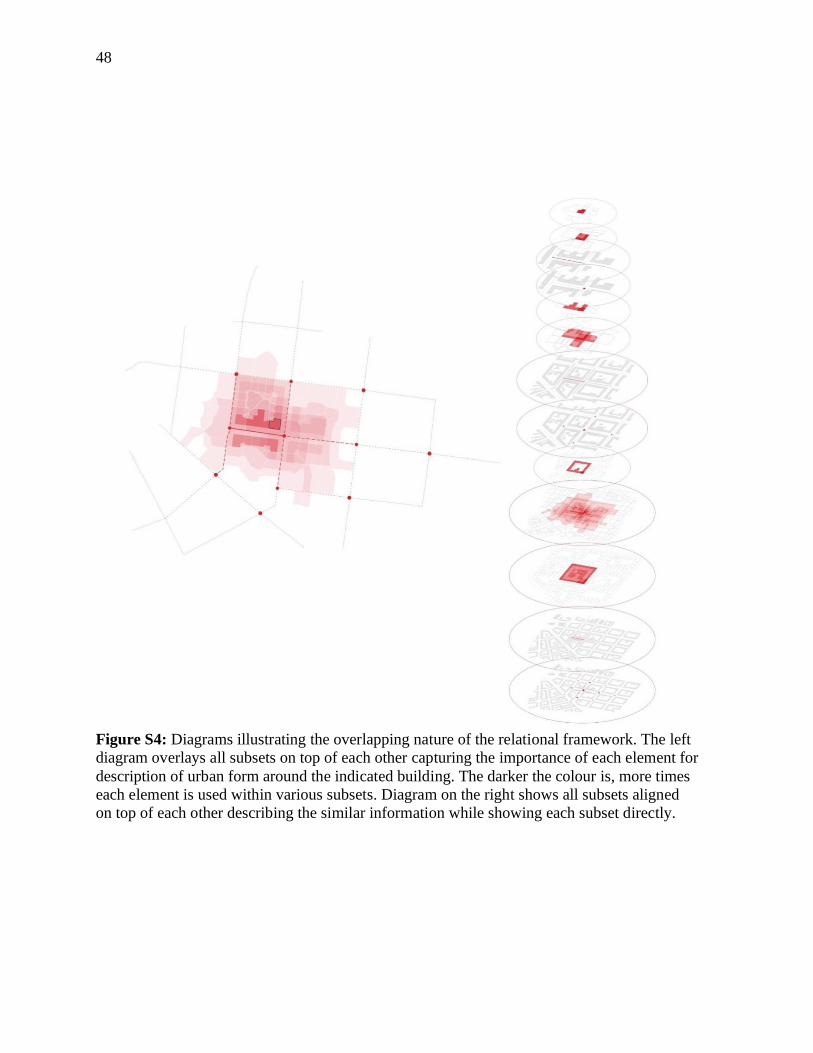
48
Figure S4: Diagrams illustrating the overlapping nature of the relational framework. The left
diagram overlays all subsets on top of each other capturing the importance of each element for
description of urban form around the indicated building. The darker the colour is, more times
each element is used within various subsets. Diagram on the right shows all subsets aligned
on top of each other describing the similar information while showing each subset directly.
49
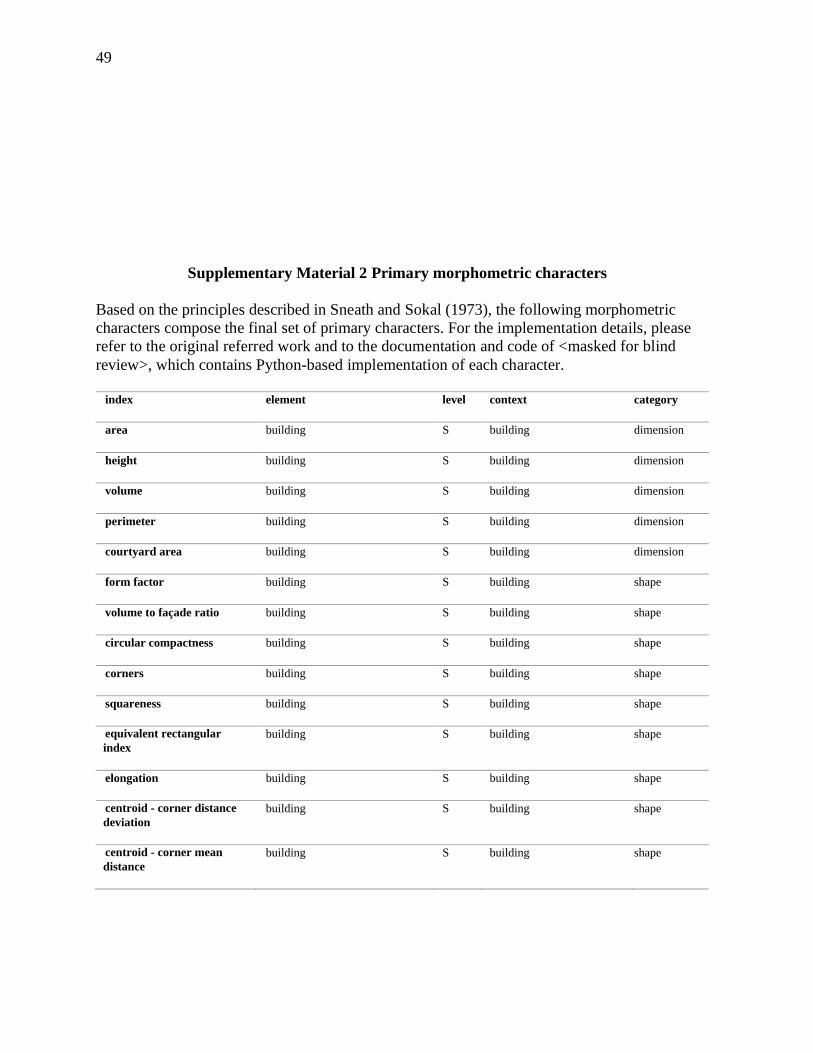
Supplementary Material 2 Primary morphometric characters
Based on the principles described in Sneath and Sokal (1973), the following morphometric
characters compose the final set of primary characters. For the implementation details, please
refer to the original referred work and to the documentation and code of <masked for blind
review>, which contains Python-based implementation of each character.
index element level context category
area building S building dimension
height building S building dimension
volume building S building dimension
perimeter building S building dimension
courtyard area building S building dimension
form factor building S building shape
volume to façade ratio building S building shape
circular compactness building S building shape
corners building S building shape
squareness building S building shape
equivalent rectangular
index
building S building shape
elongation building S building shape
centroid - corner distance
deviation
building S building shape
centroid - corner mean
distance
building S building shape

50
solar orientation building S building distribution
street alignment building S building distribution
cell alignment building S building distribution
longest axis length tessellation cell S tessellation cell dimension
area tessellation cell S tessellation cell dimension
circular compactness tessellation cell S tessellation cell shape
zequivalent rectangular
index
tessellation cell S tessellation cell shape
solar orientation tessellation cell S tessellation cell distribution
street alignment tessellation cell S tessellation cell distribution
coverage area ratio tessellation cell S tessellation cell intensity
floor area ratio tessellation cell S tessellation cell intensity
length street segment S street segment dimension
width street profile S street segment dimension
height street profile S street segment dimension
height to width ratio street profile S street segment shape
openness street profile S street segment distribution
width deviation street profile S street segment diversity
height deviation street profile S street segment diversity
linearity street segment S street segment shape
area covered street segment S street segment dimension
buildings per meter street segment S street segment intensity
area covered street node S street node dimension

51
shared walls ratio adjacent buildings M adjacent buildings distribution
alignment neighbouring buildings M neighbouring cells (queen) distribution
mean distance neighbouring buildings M neighbouring cells (queen) distribution
weighted neighbours tessellation cell M neighbouring cells (queen) distribution
area covered neighbouring cells M neighbouring cells (queen) dimension
reached cells neighbouring segments M neighbouring segments intensity
reached area neighbouring segments M neighbouring segments dimension
degree street node M neighbouring nodes distribution
mean distance to
neighbouring nodes
street node M neighbouring nodes dimension
reached cells neighbouring nodes M neighbouring nodes intensity
reached area neighbouring nodes M neighbouring nodes dimension
number of courtyards adjacent buildings L joined buildings intensity
perimeter wall length adjacent buildings L joined buildings dimension
mean inter-building
distance
neighbouring buildings L cell queen neighbours 3 distribution
building adjacency neighbouring buildings L cell queen neighbours 3 distribution
gross floor area ratio neighbouring tessellation cells L cell queen neighbours 3 intensity
weighted reached blocks neighbouring tessellation cells L cell queen neighbours 3 intensity
area block L block dimension
perimeter block L block dimension
circular compactness block L block shape
equivalent rectangular
index
block L block shape

52
compactness-weighted axis block L block shape
solar orientation block L block distribution
weighted neighbours block L block distribution
weighted cells block L block intensity
local meshedness street network L nodes 5 steps connectivity
mean segment length street network L segment 3 steps dimension
cul-de-sac length street network L nodes 3 steps dimension
reached cells street network L segment 3 steps dimension
node density street network L nodes 5 steps intensity
reached cells street network L nodes 3 steps dimension
reached area street network L nodes 3 steps dimension
proportion of cul-de-sacs street network L nodes 5 steps connectivity
proportion of 3-way
intersections
street network L nodes 5 steps connectivity
proportion of 4-way
intersections
street network L nodes 5 steps connectivity
weighted node density street network L
intensity
local closeness centrality street network L nodes 5 steps connectivity
square clustering street network L nodes within network connectivity
Table S1: Table of primary morphometric characters. For detailed explanation, formulas and
references, see the details below. Nomenclature follows the Index of Element model proposed
by <masked for blind review>. Scale refers to the topological scale from which a character is
derived, while context describes the actual set of elements used.
53
1. Area of a building is denoted as
𝑎𝑏𝑙𝑔
and defined as an area covered by a building footprint in m2.
2. Height of a building is denoted as
ℎ𝑏𝑙𝑔
and defined as building height in m measured optimally as weighted mean height (in case of
buildings with multiple parts of different height). It is a required input value not measured
within the morphometric assessment itself.
3. Volume of a building is denoted as
𝑣𝑏𝑙𝑔 = 𝑎𝑏𝑙𝑔 × ℎ𝑏𝑙𝑔
and defined as building footprint multiplied by its height in m3.
4. Perimeter of a building is denoted as
𝑝𝑏𝑙𝑔
and defined as the sum of lengths of the building exterior walls in m.
5. Courtyard area of a building is denoted as
𝑎𝑏𝑙𝑔𝑐
and defined as the sum of areas of interior holes in footprint polygons in m2.
6. Form factor of a building is denoted as
𝐹𝑜𝐹𝑏𝑙𝑔 =𝑎𝑏𝑙𝑔
𝑣𝑏𝑙𝑔
23
.
It captures three-dimensional unitless shape characteristic of a building envelope unbiased by
the building size (Bourdic et al., 2012).
7. Volume to façade ratio of a building is denoted as
𝑉𝐹𝑅𝑏𝑙𝑔 =𝑣𝑏𝑙𝑔
𝑝𝑏𝑙𝑔×ℎ𝑏𝑙𝑔.
54
It captures the aspect of the three-dimensional shape of a building envelope able to distinguish
building types, as shown by Schirmer and Axhausen (2015). It can be seen as a proxy of
volumetric compactness.
8. Circular compactness of a building is denoted as
𝐶𝐶𝑜𝑏𝑙𝑔 =𝑎𝑏𝑙𝑔𝑎𝑏𝑙𝑔𝐶
where 𝑎𝑏𝑙𝑔𝐶 is an area of minimal enclosing circle. It captures the relation of building
footprint shape to its minimal enclosing circle, illustrating the similarity of shape and circle
(Dibble et al., 2019).
9. Corners of a building is denoted as
𝐶𝑜𝑟𝑏𝑙𝑔 = ∑
𝑛
𝑖=1
𝑐𝑏𝑙𝑔
where 𝑐𝑏𝑙𝑔 is defined as a vertex of building exterior shape with an angle between adjacent
line segments ≤ 170 degrees. It uses only external shape, courtyards are not included.
Character is adapted from Steiniger et al. (2008) to exclude non-corner-like vertices.
10. Squareness of a building is denoted as
𝑆𝑞𝑢𝑏𝑙𝑔 =∑𝑛𝑖=1 𝐷𝑐𝑏𝑙𝑔𝑖
𝑛
where 𝐷 is the deviation of angle of corner 𝑐𝑏𝑙𝑔𝑖 from 90 degrees and 𝑛 is a number of
corners.
11. Equivalent rectangular index of a building is denoted as
𝐸𝑅𝐼𝑏𝑙𝑔 = √𝑎𝑏𝑙𝑔𝑎𝑏𝑙𝑔𝐵
∗𝑝𝑏𝑙𝑔𝐵𝑝𝑏𝑙𝑔
where 𝑎𝑏𝑙𝑔𝐵 is an area of a minimal rotated bounding rectangle of a building (MBR) footprint
and 𝑝𝑏𝑙𝑔𝐵 its perimeter of MBR. It is a measure of shape complexity identified by Basaraner
and Cetinkaya (2017) as the shape characters with the best performance.
12. Elongation of a building is denoted as

55
𝐸𝑙𝑜𝑏𝑙𝑔 =𝑙𝑏𝑙𝑔𝐵𝑤𝑏𝑙𝑔𝐵
where 𝑙𝑏𝑙𝑔𝐵 is length of MBR and 𝑤𝑏𝑙𝑔𝐵 is width of MBR. It captures the ratio of shorter to
the longer dimension of MBR to indirectly capture the deviation of the shape from a square
(Schirmer and Axhausen, 2015).
13. Centroid - corner distance deviation of a building is denoted as
𝐶𝐶𝐷𝑏𝑙𝑔 = √1
𝑛∑
𝑛
𝑖=1
(𝑐𝑐𝑑𝑖 − 𝑐𝑐𝑑‾)2
where 𝑐𝑐𝑑𝑖 is a distance between centroid and corner 𝑖 and 𝑐𝑐𝑑‾ is mean of all distances. It
captures a variety of shape. As a corner is considered vertex with angle < 170º to reflect
potential circularity of object and topological imprecision of building polygon.
14. Centroid - corner mean distance of a building is denoted as
𝐶𝐶𝑀𝑏𝑙𝑔 =1
𝑛(∑
𝑛
𝑖=1
𝑐𝑐𝑑𝑖)
where 𝑐𝑐𝑑𝑖 is a distance between centroid and corner 𝑖. It is a character measuring a
dimension of the object dependent on its shape (Schirmer and Axhausen, 2015).
15. Solar orientation of a building is denoted as
𝑂𝑟𝑖𝑏𝑙𝑔 = |𝑜𝑏𝑙𝑔𝐵 − 45|
where 𝑜𝑏𝑙𝑔𝐵 is an orientation of the longest axis of bounding rectangle in a range 0 - 45. It
captures the deviation of orientation from cardinal directions. There are multiple ways of
capturing orientation of a polygon. As reported by Yan et al. (2007), Duchêne et al. (2003)
assessed five different options (longest edge, weighted bisector, wall average, statistical
weighting, bounding rectangle) and concluded a bounding rectangle as the most appropriate.
Deviation from cardinal directions is used to avoid sudden changes between square-like
objects.
16. Street alignment of a building is denoted as
𝑆𝐴𝑙𝑏𝑙𝑔 = |𝑂𝑟𝑖𝑏𝑙𝑔 − 𝑂𝑟𝑖𝑒𝑑𝑔|

56
where 𝑂𝑟𝑖𝑏𝑙𝑔 is a solar orientation of the building and 𝑂𝑟𝑖𝑒𝑑𝑔 is a solar orientation of the
street edge. It reflects the relationship between the building and its street, whether it is facing
the street directly or indirectly (Schirmer and Axhausen, 2015).
17. Cell alignment of a building is denoted as
𝐶𝐴𝑙𝑏𝑙𝑔 = |𝑂𝑟𝑖𝑏𝑙𝑔 −𝑂𝑟𝑖𝑐𝑒𝑙𝑙|
where 𝑂𝑟𝑖𝑐𝑒𝑙𝑙 is a solar orientation of tessellation cell. It reflects the relationship between a
building and its cell.
18. Longest axis length of a tessellation cell is denoted as
𝐿𝐴𝐿𝑐𝑒𝑙𝑙 = 𝑑𝑐𝑒𝑙𝑙𝐶
where 𝑑𝑐𝑒𝑙𝑙𝐶 is a diameter of the minimal circumscribed circle around the tessellation cell
polygon. The axis itself does not have to be fully within the polygon. It could be seen as a
proxy of plot depth for tessellation-based analysis.
19. Area of a tessellation cell is denoted as
𝑎𝑐𝑒𝑙𝑙
and defined as an area covered by a tessellation cell footprint in m2.
20. Circular compactness of a tessellation cell is denoted as
𝐶𝐶𝑜𝑐𝑒𝑙𝑙 =𝑎𝑐𝑒𝑙𝑙𝑎𝑐𝑒𝑙𝑙𝐶
where 𝑎𝑐𝑒𝑙𝑙𝐶 is an area of minimal enclosing circle. It captures the relation of tessellation cell
footprint shape to its minimal enclosing circle, illustrating the similarity of shape and circle.
21. Equivalent rectangular index of a tessellation cell is denoted as
𝐸𝑅𝐼𝑐𝑒𝑙𝑙 = √𝑎𝑐𝑒𝑙𝑙𝑎𝑐𝑒𝑙𝑙𝐵
∗𝑝𝑐𝑒𝑙𝑙𝐵𝑝𝑐𝑒𝑙𝑙
where 𝑎𝑐𝑒𝑙𝑙𝐵 is an area of the minimal rotated bounding rectangle of a tessellation cell (MBR)
footprint and 𝑝𝑐𝑒𝑙𝑙𝐵 its perimeter of MBR.
22. Solar orientation of a tessellation cell is denoted as
𝑂𝑟𝑖𝑐𝑒𝑙𝑙 = |𝑜𝑐𝑒𝑙𝑙𝐵 − 45|

57
where 𝑜𝑐𝑒𝑙𝑙𝐵 is an orientation of the longest axis of bounding rectangle in a range 0 - 45. It
captures the deviation of orientation from cardinal directions.
23. Street alignment of a building is denoted as
𝑆𝐴𝑙𝑐𝑒𝑙𝑙 = |𝑂𝑟𝑖𝑐𝑒𝑙𝑙 − 𝑂𝑟𝑖𝑒𝑑𝑔|
where 𝑂𝑟𝑖𝑐𝑒𝑙𝑙 is a solar orientation of tessellation cell and 𝑂𝑟𝑖𝑒𝑑𝑔 is a solar orientation of the
street edge. It reflects the relationship between tessellation cell and its street, whether it is
facing the street directly or indirectly.
24. Coverage area ratio of a tessellation cell is denoted as
𝐶𝐴𝑅𝑐𝑒𝑙𝑙 =𝑎𝑏𝑙𝑔𝑎𝑐𝑒𝑙𝑙
where 𝑎𝑏𝑙𝑔 is an area of a building and 𝑎𝑐𝑒𝑙𝑙 is an area of related tessellation cell (Schirmer
and Axhausen, 2015). Coverage area ratio (CAR) is one of the commonly used characters
capturing intensity of development. However, the definitions vary based on the spatial unit.
25. Floor area ratio of a tessellation cell is denoted as
𝐹𝐴𝑅𝑐𝑒𝑙𝑙 =𝑓𝑎𝑏𝑙𝑔𝑎𝑐𝑒𝑙𝑙
where 𝑓𝑎𝑏𝑙𝑔 is a floor area of a building and 𝑎𝑐𝑒𝑙𝑙 is an area of related tessellation cell. Floor
area could be computed based on the number of levels or using an approximation based on
building height.
26. Length of a street segment is denoted as
𝑙𝑒𝑑𝑔
and defined as a length of a LineString geometry in metres.
27. Width of a street profile is denoted as
𝑤𝑠𝑝 =1
𝑛(∑
𝑛
𝑖=1
𝑤𝑖)
where 𝑤𝑖 is width of a street section i. The algorithm generates street sections every 3 meters
alongside the street segment, and measures mean value. In the case of the open-ended street,
50 metres is used as a perception-based proximity limit (Araldi and Fusco, 2019).

58
28. Height of a street profile is denoted as
ℎ𝑠𝑝 =1
𝑛(∑
𝑛
𝑖=1
ℎ𝑖)
where ℎ𝐼 is mean height of a street section i. The algorithm generates street sections every 3
meters alongside the street segment, and measures mean value (Araldi and Fusco, 2019).
29. Height to width ratio of a street profile is denoted as
𝐻𝑊𝑅𝑠𝑝 =1
𝑛(∑
𝑛
𝑖=1
ℎ𝑖𝑤𝑖)
where ℎ𝐼 is mean height of a street section i and 𝑤𝑖 is the width of a street section i. The
algorithm generates street sections every 3 meters alongside the street segment, and measures
mean value (Araldi and Fusco, 2019).
30. Openness of a street profile is denoted as
𝑂𝑝𝑒𝑠𝑝 = 1 −∑ℎ𝑖𝑡
2∑𝑠𝑒𝑐
where ∑ℎ𝑖𝑡 is a sum of section lines (left and right sides separately) intersecting buildings and
∑𝑠𝑒𝑐 total number of street sections. The algorithm generates street sections every 3 meters
alongside the street segment.
31. Width deviation of a street profile is denoted as
𝑤𝐷𝑒𝑣𝑠𝑝 = √1
𝑛∑
𝑛
𝑖=1
(𝑤𝑖 −𝑤𝑠𝑝)2
where 𝑤𝑖 is width of a street section i and 𝑤𝑠𝑝 is mean width. The algorithm generates street
sections every 3 meters alongside the street segment.
32. Height deviation of a street profile is denoted as
ℎ𝐷𝑒𝑣𝑠𝑝 = √1
𝑛∑
𝑛
𝑖=1
(ℎ𝑖 − ℎ𝑠𝑝)2

59
where ℎ𝑖 is height of a street section i and ℎ𝑠𝑝 is mean height. The algorithm generates street
sections every 3 meters alongside the street segment.
33. Linearity of a street segment is denoted as
𝐿𝑖𝑛𝑒𝑑𝑔 =𝑙𝑒𝑢𝑐𝑙𝑙𝑒𝑑𝑔
where 𝑙𝑒𝑢𝑐𝑙 is Euclidean distance between endpoints of a street segment and 𝑙𝑒𝑑𝑔 is a street
segment length. It captures the deviation of a segment shape from a straight line. It is adapted
from (Araldi and Fusco, 2019).
34. Area covered by a street segment is denoted as
𝑎𝑒𝑑𝑔 =∑
𝑛
𝑖=1
𝑎𝑐𝑒𝑙𝑙𝑖
where 𝑎𝑐𝑒𝑙𝑙𝑖 is an area of tessellation cell 𝑖 belonging to the street segment. It captures the area
which is likely served by each segment.
35. Buildings per meter of a street segment is denoted as
𝐵𝑝𝑀𝑒𝑑𝑔 =∑𝑏𝑙𝑔
𝑙𝑒𝑑𝑔
where ∑𝑏𝑙𝑔 is a number of buildings belonging to a street segment and 𝑙𝑒𝑑𝑔 is a length of a
street segment. It reflects the granularity of development along each segment.
36. Area covered by a street node is denoted as
𝑎𝑛𝑜𝑑𝑒 =∑
𝑛
𝑖=1
𝑎𝑐𝑒𝑙𝑙𝑖
where 𝑎𝑐𝑒𝑙𝑙𝑖 is an area of tessellation cell 𝑖 belonging to the street node. It captures the area
which is likely served by each node.
37. Shared walls ratio of adjacent buildings is denoted as
𝑆𝑊𝑅𝑏𝑙𝑔 =𝑝𝑏𝑙𝑔𝑠ℎ𝑎𝑟𝑒𝑑𝑝𝑏𝑙𝑔

60
where 𝑝𝑏𝑙𝑔𝑠ℎ𝑎𝑟𝑒𝑑 is a length of a perimeter shared with adjacent buildings and 𝑝𝑏𝑙𝑔 is a
perimeter of a building. It captures the amount of wall space facing the open space (Hamaina
et al., 2012).
38. Alignment of neighbouring buildings is denoted as
𝐴𝑙𝑖𝑏𝑙𝑔 =1
𝑛∑
𝑛
𝑖=1
|𝑂𝑟𝑖𝑏𝑙𝑔 − 𝑂𝑟𝑖𝑏𝑙𝑔𝑖|
where 𝑂𝑟𝑖𝑏𝑙𝑔 is the solar orientation of a building and 𝑂𝑟𝑖𝑏𝑙𝑔𝑖 is the solar orientation of
building 𝑖 on a neighbouring tessellation cell. It calculates the mean deviation of solar
orientation of buildings on adjacent cells from a building. It is adapted from Hijazi et al.
(2016).
39. Mean distance to neighbouring buildings is denoted as
𝑁𝐷𝑖𝑏𝑙𝑔 =1
𝑛∑
𝑛
𝑖=1
𝑑𝑏𝑙𝑔,𝑏𝑙𝑔𝑖
where 𝑑𝑏𝑙𝑔,𝑏𝑙𝑔𝑖 is a distance between building and building 𝑖 on a neighbouring tessellation
cell. It is adapted from Hijazi et al. (2016). It captures the average proximity to other
buildings.
40. Weighted neighbours of a tessellation cell is denoted as
𝑊𝑁𝑒𝑐𝑒𝑙𝑙 =∑𝑐𝑒𝑙𝑙𝑛𝑝𝑐𝑒𝑙𝑙
where ∑𝑐𝑒𝑙𝑙𝑛 is a number of cell neighbours and 𝑝𝑐𝑒𝑙𝑙 is a perimeter of a cell. It reflects
granularity of morphological tessellation.
41. Area covered by neighbouring cells is denoted as
𝑎𝑐𝑒𝑙𝑙𝑛 =∑
𝑛
𝑖=1
𝑎𝑐𝑒𝑙𝑙𝑖
where 𝑎𝑐𝑒𝑙𝑙𝑖 is area of tessellation cell 𝑖 within topological distance 1. It captures the scale of
morphological tessellation.
42. Reached cells by neighbouring segments is denoted as
61
𝑅𝐶𝑒𝑑𝑔𝑛 =∑
𝑛
𝑖=1
𝑐𝑒𝑙𝑙𝑠𝑒𝑑𝑔𝑖
where 𝑐𝑒𝑙𝑙𝑠𝑒𝑑𝑔𝑖 is number of tessellation cells on segment 𝑖 within topological distance 1. It
captures accessible granularity.
43. Reached area by neighbouring segments is denoted as
𝑎𝑒𝑑𝑔𝑛 =∑
𝑛
𝑖=1
𝑎𝑒𝑑𝑔𝑖
where 𝑎𝑒𝑑𝑔𝑖 is an area covered by a street segment 𝑖 within topological distance 1. It captures
an accessible area.
44. Degree of a street node is denoted as
𝑑𝑒𝑔𝑛𝑜𝑑𝑒𝑖 =∑
𝑗
𝑒𝑑𝑔𝑖𝑗
where 𝑒𝑑𝑔𝑖𝑗 is an edge of a street network between node 𝑖 and node 𝑗. It reflects the basic
degree centrality.
45. Mean distance to neighbouring nodes from a street node is denoted as
𝑀𝐷𝑖𝑛𝑜𝑑𝑒 =1
𝑛∑
𝑛
𝑖=1
𝑑𝑛𝑜𝑑𝑒,𝑛𝑜𝑑𝑒𝑖
where 𝑑𝑛𝑜𝑑𝑒,𝑛𝑜𝑑𝑒𝑖 is a distance between node and node 𝑖 within topological distance 1. It
captures the average proximity to other nodes.
46. Reached cells by neighbouring nodes is denoted as
𝑅𝐶𝑛𝑜𝑑𝑒𝑛 =∑
𝑛
𝑖=1
𝑐𝑒𝑙𝑙𝑠𝑛𝑜𝑑𝑒𝑖
where 𝑐𝑒𝑙𝑙𝑠𝑛𝑜𝑑𝑒𝑖 is number of tessellation cells on node 𝑖 within topological distance 1. It
captures accessible granularity.
47. Reached area by neighbouring nodes is denoted as

62
𝑎𝑛𝑜𝑑𝑒𝑛 =∑
𝑛
𝑖=1
𝑎𝑛𝑜𝑑𝑒𝑖
where 𝑎𝑛𝑜𝑑𝑒𝑖 is an area covered by a street node 𝑖 within topological distance 1. It captures an
accessible area.
48. Number of courtyards of adjacent buildings is denoted as
𝑁𝐶𝑜𝑏𝑙𝑔𝑎𝑑𝑗
where 𝑁𝐶𝑜𝑏𝑙𝑔𝑎𝑑𝑗 is a number of interior rings of a polygon composed of footprints of
adjacent buildings (Schirmer and Axhausen, 2015).
49. Perimeter wall length of adjacent buildings is denoted as
𝑝𝑏𝑙𝑔𝑎𝑑𝑗
where 𝑝𝑏𝑙𝑔𝑎𝑑𝑗 is a length of an exterior ring of a polygon composed of footprints of adjacent
buildings.
50. Mean inter-building distance between neighbouring buildings is denoted as
𝐼𝐵𝐷𝑏𝑙𝑔 =1
𝑛∑
𝑛
𝑖=1
𝑑𝑏𝑙𝑔,𝑏𝑙𝑔𝑖
where 𝑑𝑏𝑙𝑔,𝑏𝑙𝑔𝑖 is a distance between building and building 𝑖 on a tessellation cell within
topological distance 3. It is adapted from Caruso et al. (2017). It captures the average
proximity between buildings.
51. Building adjacency of neighbouring buildings is denoted as
𝐵𝑢𝐴𝑏𝑙𝑔 =∑𝑏𝑙𝑔𝑎𝑑𝑗∑𝑏𝑙𝑔
where ∑𝑏𝑙𝑔𝑎𝑑𝑗 is a number of joined built-up structures within topological distance three and
∑𝑏𝑙𝑔 is a number of buildings within topological distance 3. It is adapted from Vanderhaegen
and Canters (2017).
52. Gross floor area ratio of neighbouring tessellation cells is denoted as
𝐺𝐹𝐴𝑅𝑐𝑒𝑙𝑙 =∑𝑛𝑖=1 𝐹𝐴𝑅𝑐𝑒𝑙𝑙𝑖∑𝑛𝑖=1 𝑎𝑐𝑒𝑙𝑙𝑖

63
where 𝐹𝐴𝑅𝑐𝑒𝑙𝑙𝑖 is a floor area ratio of tessellation cell 𝑖 and 𝑎𝑐𝑒𝑙𝑙𝑖 is an area of tessellation cell
𝑖 within topological distance 3. Based on Dibble et al. (2019).
53. Weighted reached blocks of neighbouring tessellation cells is denoted as
𝑊𝑅𝐵𝑐𝑒𝑙𝑙 =∑𝑏𝑙𝑘
∑𝑛𝑖=1 𝑎𝑐𝑒𝑙𝑙𝑖
where ∑𝑏𝑙𝑘 is a number of blocks within topological distance three and 𝑎𝑐𝑒𝑙𝑙𝑖 is an area of
tessellation cell 𝑖 within topological distance three.
54. Area of a block is denoted as
𝑎𝑏𝑙𝑘
and defined as an area covered by a block footprint in m2.
55. Perimeter of a block is denoted as
𝑝𝑏𝑙𝑘
and defined as lengths of the block polygon exterior in m.
56. Circular compactness of a block is denoted as
𝐶𝐶𝑜𝑏𝑙𝑘 =𝑎𝑏𝑙𝑘𝑎𝑏𝑙𝑘𝐶
where 𝑎𝑏𝑙𝑘𝐶 is an area of minimal enclosing circle. It captures the relation of block footprint
shape to its minimal enclosing circle, illustrating the similarity of shape and circle.
57. Equivalent rectangular index of a block is denoted as
𝐸𝑅𝐼𝑏𝑙𝑘 = √𝑎𝑏𝑙𝑘𝑎𝑏𝑙𝑘𝐵
∗𝑝𝑏𝑙𝑘𝐵𝑝𝑏𝑙𝑘
where 𝑎𝑏𝑙𝑘𝐵 is an area of the minimal rotated bounding rectangle of a block (MBR) footprint
and 𝑝𝑏𝑙𝑘𝐵 its perimeter of MBR.
58. Compactness-weighted axis of a block is denoted as
𝐶𝑊𝐴𝑏𝑙𝑘 = 𝑑𝑏𝑙𝑘𝐶 × (4
𝜋−16(𝑎𝑏𝑙𝑘)
𝑝𝑏𝑙𝑘2 )

64
where 𝑑𝑏𝑙𝑘𝐶 is a diameter of the minimal circumscribed circle around the block polygon, 𝑎𝑏𝑙𝑘
is an area of a block and 𝑝𝑏𝑙𝑘 is a perimeter of a block. It is a proxy of permeability of an area
(Feliciotti, 2018).
59. Solar orientation of a block is denoted as
𝑂𝑟𝑖𝑏𝑙𝑘 = |𝑜𝑏𝑙𝑘𝐵 − 45|
where 𝑜𝑏𝑙𝑘𝐵 is an orientation of the longest axis of bounding rectangle in a range 0 - 45. It
captures the deviation of orientation from cardinal directions.
60. Weighted neighbours of a block is denoted as
𝑤𝑁𝑏𝑙𝑘 =∑𝑏𝑙𝑘𝑛𝑝𝑏𝑙𝑘
where ∑𝑏𝑙𝑘𝑛 is a number of block neighbours and 𝑝𝑏𝑙𝑘 is a perimeter of a block. It reflects
granularity of a mesh of blocks.
61. Weighted cells of a block is denoted as
𝑤𝐶𝑏𝑙𝑘 =∑𝑐𝑒𝑙𝑙
𝑎𝑏𝑙𝑘
where ∑𝑐𝑒𝑙𝑙 is a number of cells composing a block and 𝑎𝑏𝑙𝑘 is an area of a block. It captures
the granularity of each block.
62. Local meshedness of a street network is denoted as
𝑀𝑒𝑠𝑛𝑜𝑑𝑒 =𝑒 − 𝑣 + 1
2𝑣 − 5
where 𝑒 is a number of edges in a subgraph, and 𝑣 is the number of nodes in a subgraph
(Feliciotti, 2018). A subgraph is defined as a network within topological distance five around
a node.
63. Mean segment length of a street network is denoted as
𝑀𝑆𝐿𝑒𝑑𝑔 =1
𝑛∑
𝑛
𝑖=1
𝑙𝑒𝑑𝑔𝑖
where 𝑙𝑒𝑑𝑔𝑖 is a length of a street segment 𝑖 within a topological distance 3 around a segment.
64. Cul-de-sac length of a street network is denoted as

65
𝐶𝐷𝐿𝑛𝑜𝑑𝑒 =∑
𝑛
𝑖=1
𝑙𝑒𝑑𝑔𝑖 , 𝑖𝑓𝑒𝑑𝑔𝑖 𝑖𝑠𝑐𝑢𝑙 − 𝑑𝑒 − 𝑠𝑎𝑐
where 𝑙𝑒𝑑𝑔𝑖 is a length of a street segment 𝑖 within a topological distance 3 around a node.
65. Reached cells by street network segments is denoted as
𝑅𝐶𝑒𝑑𝑔 =∑
𝑛
𝑖=1
𝑐𝑒𝑙𝑙𝑠𝑒𝑑𝑔𝑖
where 𝑐𝑒𝑙𝑙𝑠𝑒𝑑𝑔𝑖 is number of tessellation cells on segment 𝑖 within topological distance 3. It
captures accessible granularity.
66. Node density of a street network is denoted as
𝐷𝑛𝑜𝑑𝑒 =∑𝑛𝑜𝑑𝑒
∑𝑛𝑖=1 𝑙𝑒𝑑𝑔𝑖
where ∑𝑛𝑜𝑑𝑒 is a number of nodes within a subgraph and 𝑙𝑒𝑑𝑔𝑖 is a length of a segment 𝑖
within a subgraph. A subgraph is defined as a network within topological distance five around
a node.
67. Reached cells by street network nodes is denoted as
𝑅𝐶𝑛𝑜𝑑𝑒𝑛𝑒𝑡 =∑
𝑛
𝑖=1
𝑐𝑒𝑙𝑙𝑠𝑛𝑜𝑑𝑒𝑖
where 𝑐𝑒𝑙𝑙𝑠𝑛𝑜𝑑𝑒𝑖 is number of tessellation cells on node 𝑖 within topological distance 3. It
captures accessible granularity.
68. Reached area by street network nodes is denoted as
𝑎𝑛𝑜𝑑𝑒𝑛𝑒𝑡 =∑
𝑛
𝑖=1
𝑎𝑛𝑜𝑑𝑒𝑖
where 𝑎𝑛𝑜𝑑𝑒𝑖 is an area covered by a street node 𝑖 within topological distance 3. It captures an
accessible area.
69. Proportion of cul-de-sacs within a street network is denoted as
66
𝑝𝐶𝐷𝑛𝑜𝑑𝑒 =∑𝑛𝑖=1 𝑛𝑜𝑑𝑒𝑖 , 𝑖𝑓𝑑𝑒𝑔𝑛𝑜𝑑𝑒𝑖 = 1
∑𝑛𝑖=1 𝑛𝑜𝑑𝑒𝑖
where 𝑛𝑜𝑑𝑒𝑖 is a node whiting topological distance five around a node. Adapted from Boeing
(2017).
70. Proportion of 3-way intersections within a street network is denoted as
𝑝3𝑊𝑛𝑜𝑑𝑒 =∑𝑛𝑖=1 𝑛𝑜𝑑𝑒𝑖 , 𝑖𝑓𝑑𝑒𝑔𝑛𝑜𝑑𝑒𝑖 = 3
∑𝑛𝑖=1 𝑛𝑜𝑑𝑒𝑖
where 𝑛𝑜𝑑𝑒𝑖 is a node whiting topological distance five around a node. Adapted from Boeing
(2017).
71. Proportion of 4-way intersections within a street network is denoted as
𝑝4𝑊𝑛𝑜𝑑𝑒 =∑𝑛𝑖=1 𝑛𝑜𝑑𝑒𝑖 , 𝑖𝑓𝑑𝑒𝑔𝑛𝑜𝑑𝑒𝑖 = 4
∑𝑛𝑖=1 𝑛𝑜𝑑𝑒𝑖
where 𝑛𝑜𝑑𝑒𝑖 is a node whiting topological distance five around a node. Adapted from Boeing
(2017).
72. Weighted node density of a street network is denoted as
𝑤𝐷𝑛𝑜𝑑𝑒 =∑𝑛𝑖=1 𝑑𝑒𝑔𝑛𝑜𝑑𝑒𝑖 − 1
∑𝑛𝑖=1 𝑙𝑒𝑑𝑔𝑖
where 𝑑𝑒𝑔𝑛𝑜𝑑𝑒𝑖 is a degree of a node 𝑖 within a subgraph and 𝑙𝑒𝑑𝑔𝑖 is a length of a segment 𝑖
within a subgraph. A subgraph is defined as a network within topological distance five around
a node.
73. Local closeness centrality of a street network is denoted as
𝑙𝐶𝐶𝑛𝑜𝑑𝑒 =𝑛 − 1
∑𝑛−1𝑣=1 𝑑(𝑣, 𝑢)
where 𝑑(𝑣, 𝑢) is the shortest-path distance between 𝑣 and 𝑢, and 𝑛 is the number of nodes
within a subgraph. A subgraph is defined as a network within topological distance five around
a node.
74. Square clustering of a street network is denoted as

67
𝑠𝐶𝑙𝑛𝑜𝑑𝑒 =∑𝑘𝑣𝑢=1 ∑𝑘𝑣
𝑤=𝑢+1 𝑞𝑣(𝑢,𝑤)
∑𝑘𝑣𝑢=1
∑𝑘𝑣𝑤=𝑢+1
[𝑎𝑣(𝑢, 𝑤) + 𝑞𝑣(𝑢, 𝑤)]
where 𝑞𝑣(𝑢, 𝑤) are the number of common neighbours of 𝑢 and 𝑤 other than 𝑣 (ie squares),
and 𝑎𝑣(𝑢, 𝑤) = (𝑘𝑢 − (1 + 𝑞𝑣(𝑢,𝑤) + 𝜃𝑢𝑣))(𝑘𝑤 − (1 + 𝑞𝑣(𝑢, 𝑤) + 𝜃𝑢𝑤)), where 𝜃𝑢𝑤 = 1
if 𝑢 and 𝑤 are connected and 0 otherwise (Lind et al., 2005).
Table below contains each character and its classification to scale following <masked for
blind review> and key used in additional figures across supplementary materials.
index element grain extent id
area building S S sdbAre
height building S S sdbHei
volume building S S sdbVol
perimeter building S S sdbPer
courtyard area building S S sdbCoA
form factor building S S ssbFoF
volume to façade ratio building S S ssbVFR
circular compactness building S S ssbCCo
corners building S S ssbCor
squareness building S S ssbSqu
equivalent rectangular index building S S ssbERI
elongation building S S ssbElo
centroid - corner distance
deviation building S S ssbCCD
centroid - corner mean distance building S S ssbCCM
solar orientation building S S stbOri
street alignment building S S stbSAl
cell alignment building S S stbCeA
longest axis length tessellation cell S S sdcLAL
area tessellation cell S S sdcAre
circular compactness tessellation cell S S sscCCo
equivalent rectangular index tessellation cell S S sscERI

68
solar orientation tessellation cell S S stcOri
street alignment tessellation cell S S stcSAl
coverage area ratio tessellation cell S S sicCAR
floor area ratio tessellation cell S S sicFAR
length street segment S S sdsLen
width street profile S S sdsSPW
height street profile S S sdsSPH
height to width ratio street profile S S sdsSPR
openness street profile S S sdsSPO
width deviation street profile S S sdsSWD
height deviation street profile S S sdsSHD
linearity street segment S S sssLin
area covered street segment S S sdsAre
buildings per meter street segment S S sisBpM
area covered street node S S sddAre
shared walls ratio
adjacent
buildings S S mtbSWR
alignment
neighbouring
buildings S S mtbAli
mean distance
neighbouring
buildings S S mtbNDi
weighted neighbours tessellation cell S S mtcWNe
area covered
neighbouring
cells S S mdcAre
reached cells
neighbouring
segments S S misRea
reached area
neighbouring
segments S S mdsAre
degree street node S S mtdDeg
mean distance to neighbouring
nodes street node S S mtdMDi
reached cells
neighbouring
nodes S S midRea
reached area
neighbouring
nodes S S midAre
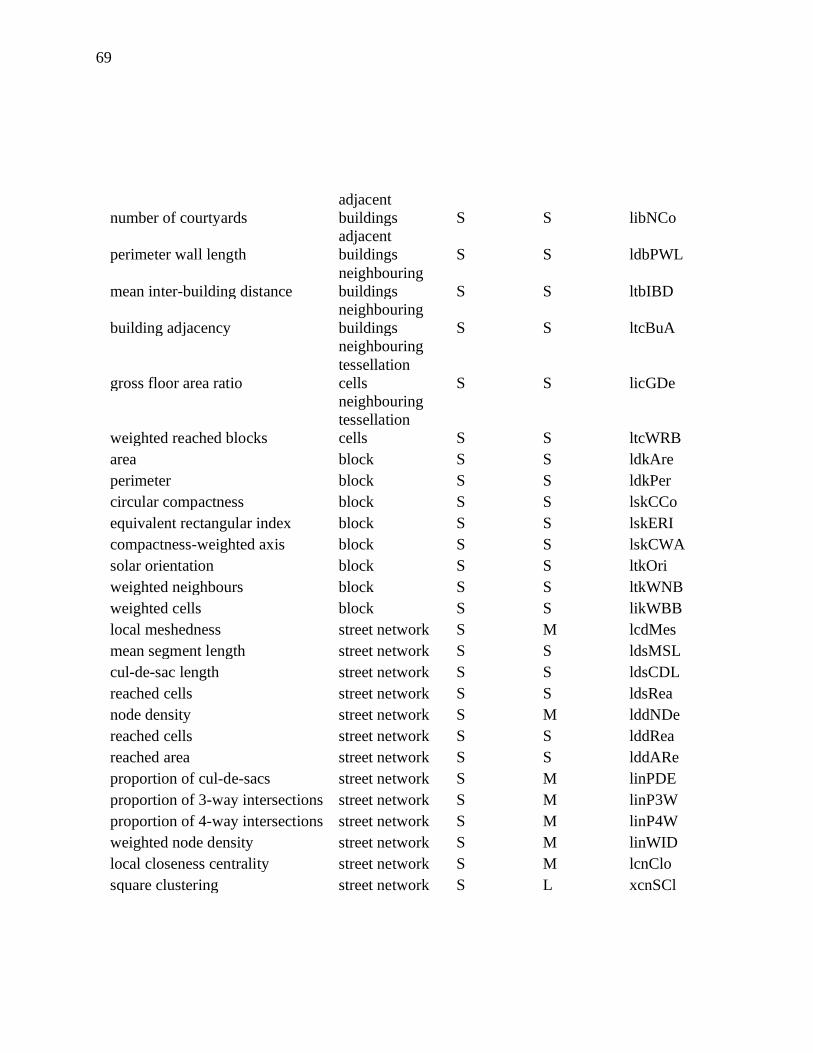
69
number of courtyards
adjacent
buildings S S libNCo
perimeter wall length
adjacent
buildings S S ldbPWL
mean inter-building distance
neighbouring
buildings S S ltbIBD
building adjacency
neighbouring
buildings S S ltcBuA
gross floor area ratio
neighbouring
tessellation
cells S S licGDe
weighted reached blocks
neighbouring
tessellation
cells S S ltcWRB
area block S S ldkAre
perimeter block S S ldkPer
circular compactness block S S lskCCo
equivalent rectangular index block S S lskERI
compactness-weighted axis block S S lskCWA
solar orientation block S S ltkOri
weighted neighbours block S S ltkWNB
weighted cells block S S likWBB
local meshedness street network S M lcdMes
mean segment length street network S S ldsMSL
cul-de-sac length street network S S ldsCDL
reached cells street network S S ldsRea
node density street network S M lddNDe
reached cells street network S S lddRea
reached area street network S S lddARe
proportion of cul-de-sacs street network S M linPDE
proportion of 3-way intersections street network S M linP3W
proportion of 4-way intersections street network S M linP4W
weighted node density street network S M linWID
local closeness centrality street network S M lcnClo
square clustering street network S L xcnSCl

70
Table S2: Additional classification of primary morphometric characters.

71
Supplementary Material 3: Bayesian Information Criterion
Figure S5: Bayesian Information Criterion score for the variable number of components in
Prague case study. Shaded area reflects .95 confidence interval.

72
Figure S6: Bayesian Information Criterion score for the variable number of components in
Amsterdam case study. Shaded area reflects .95 confidence interval, red line marks the first
significant minimum.
Supplementary material 4: Full extent of presented maps illustrating spatial distribution
of results of cluster analysis.

73
Figure S7: Spatial distribution of 10 detected clusters in Prague.

74
75
Figure S8: Spatial distribution of 10 detected clusters in Amsterdam.
Figure S9: Spatial distribution of different branches of the combined dendrogram in Prague.

76

77
Figure S10: Spatial distribution of different branches of the combined dendrogram in
Amsterdam.
Supplementary Material 5: Contingency tables
,
cluster 1840 1880 1920 1950 1970 1990 2012
0 349 85 263 1219 1506 1442 565
1 1138 513 3588 17095 4499 1265 1453
2 1407 621 1655 4537 3108 2530 1357
3 1392 1719 2658 2895 678 223 213
4 145 54 156 888 1993 6414 532
5 3442 568 1487 7677 3975 2084 3459
6 1413 2778 4109 2005 150 4 8
7 3177 110 73 49 0 0 1
8 2834 981 2661 9645 4259 2629 829
9 69 63 151 3764 1147 1573 1244
Table S3: Contingency table showing the counts of features per historical origin within
individual clusters in Prague case study.
cluster
Multi-family
housing
Single-family
housing Villas
Industry
small
Industry
large other
0 112 617 3 322 1138 3497
1 437 27953 1164 3 0 33
2 3706 7238 203 972 789 2830
3 8472 577 136 93 26 626
4 9553 748 0 0 0 17
5 75 21590 147 50 22 1156
6 10070 231 153 0 0 34
7 2374 6 0 0 0 1057
8 4296 18110 1080 117 60 340

78
9 868 7015 79 0 0 120
Table S4: Contingency table showing the counts of features per predominant land use within
individual clusters in Prague case study.
cluster organic
perimeter
block village
garden
city modernism production services
0 0 17 377 213 39 3216 352
1 0 3 11384 16150 100 1 0
2 8 453 2937 2859 1394 2383 1085
3 192 6516 100 725 248 234 197
4 0 54 192 324 8782 17 49
5 0 0 13298 7824 40 33 61
6 604 8522 8 575 6 0 0
7 3281 49 0 0 0 3 78
8 0 263 6614 9900 2189 98 78
9 0 0 880 3176 1112 0 62
Table S5: Contingency table showing the counts of features per expert typology classes
within individual clusters in Prague case study.
cluster 1800 1850 1900 1930 1945 1960 1975 1985 1995 2005 2020
0 2 6 25 653 757 5541 11488 10448 10153 3362 3327
1 314 0 5201 17479 5118 325 60 395 743 241 110
2 65 42 360 1794 914 1409 1949 1258 1280 1597 1230
3 59 27 303 2133 1072 1244 2189 1512 1906 1990 1452
4 2 0 62 32 27 81 267 288 420 477 361
5 927 24 2000 5825 2824 6583 3236 2564 3854 3662 3393
6 111 45 713 5116 2366 4643 8811 4463 5696 4171 3089
7 7153 98 1531 1828 692 145 213 362 722 386 125
8 31 24 371 7976 6716 11113 5369 1948 7652 2948 3739
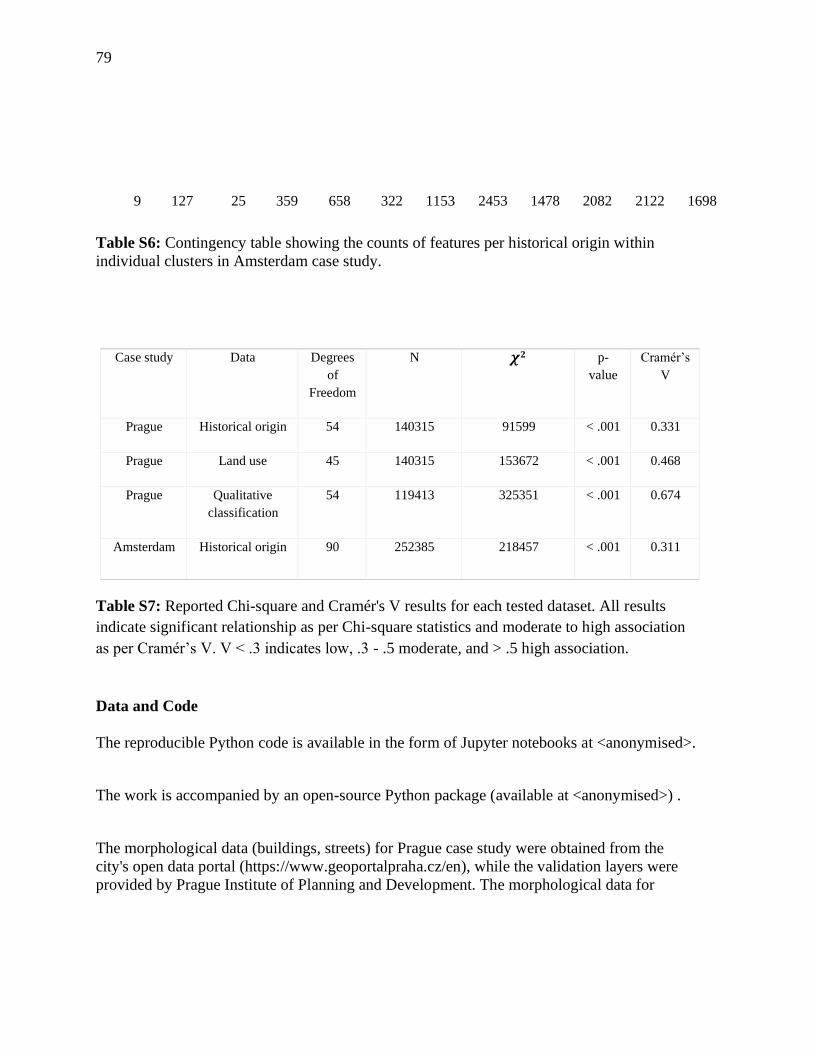
79
9 127 25 359 658 322 1153 2453 1478 2082 2122 1698
Table S6: Contingency table showing the counts of features per historical origin within
individual clusters in Amsterdam case study.
Case study Data Degrees
of
Freedom
N 𝝌𝟐 p-
value
Cramér’s
V
Prague Historical origin 54 140315 91599 < .001 0.331
Prague Land use 45 140315 153672 < .001 0.468
Prague Qualitative
classification
54 119413 325351 < .001 0.674
Amsterdam Historical origin 90 252385 218457 < .001 0.311
Table S7: Reported Chi-square and Cramér's V results for each tested dataset. All results
indicate significant relationship as per Chi-square statistics and moderate to high association
as per Cramér’s V. V < .3 indicates low, .3 - .5 moderate, and > .5 high association.
Data and Code
The reproducible Python code is available in the form of Jupyter notebooks at <anonymised>.
The work is accompanied by an open-source Python package (available at <anonymised>) .
The morphological data (buildings, streets) for Prague case study were obtained from the
city's open data portal (https://www.geoportalpraha.cz/en), while the validation layers were
provided by Prague Institute of Planning and Development. The morphological data for

80
Amsterdam are obtained from 3D BAG repository (Dukai, 2020) and Basisregistratie
Grootschalige Topografie, BGT (http://data.nlextract.nl/)
- Dukai, B. (2020) ‘3D Registration of Buildings and Addresses (BAG) / 3D
Basisregistratie Adressen en Gebouwen (BAG)’, 4TU.ResearchData. doi:
10.4121/uuid:f1f9759d-024a-492a-b821-07014dd6131c.