mems based hand.pptx
TRANSCRIPT
7/27/2019 MEMS BASED HAND.pptx
http://slidepdf.com/reader/full/mems-based-handpptx 1/19
7/27/2019 MEMS BASED HAND.pptx
http://slidepdf.com/reader/full/mems-based-handpptx 2/19
CONTENTS
• Objective
• Software &Hardware requirements
• Block diagram
• Mems technology • Implementation
• Applications &Advantages
• Future scope• Conclusion
• References

7/27/2019 MEMS BASED HAND.pptx
http://slidepdf.com/reader/full/mems-based-handpptx 3/19
Main Objective
The main aim of this project is tocontrol the robot using MEMS.TheMEMS will be fixed to the hand.
Whenever the hand moves in any
direction, the mechanical movement of the hand will be recognized by MEMS.MEMS converts this mechanicalhand movement in to equivalent
electrical signals and sends it to themicrocontroller. The microcontrollerreceives this and controls the robot.
7/27/2019 MEMS BASED HAND.pptx
http://slidepdf.com/reader/full/mems-based-handpptx 4/19
The three main software tools &Hardware tools are:Software tools:
Keil compiler
Proload
Orcad
Hardware Tools:
Microcontroller AT89S52
MEMS sensor DC motors and driver circuit
Software &Hardwarerequirements
7/27/2019 MEMS BASED HAND.pptx
http://slidepdf.com/reader/full/mems-based-handpptx 5/19
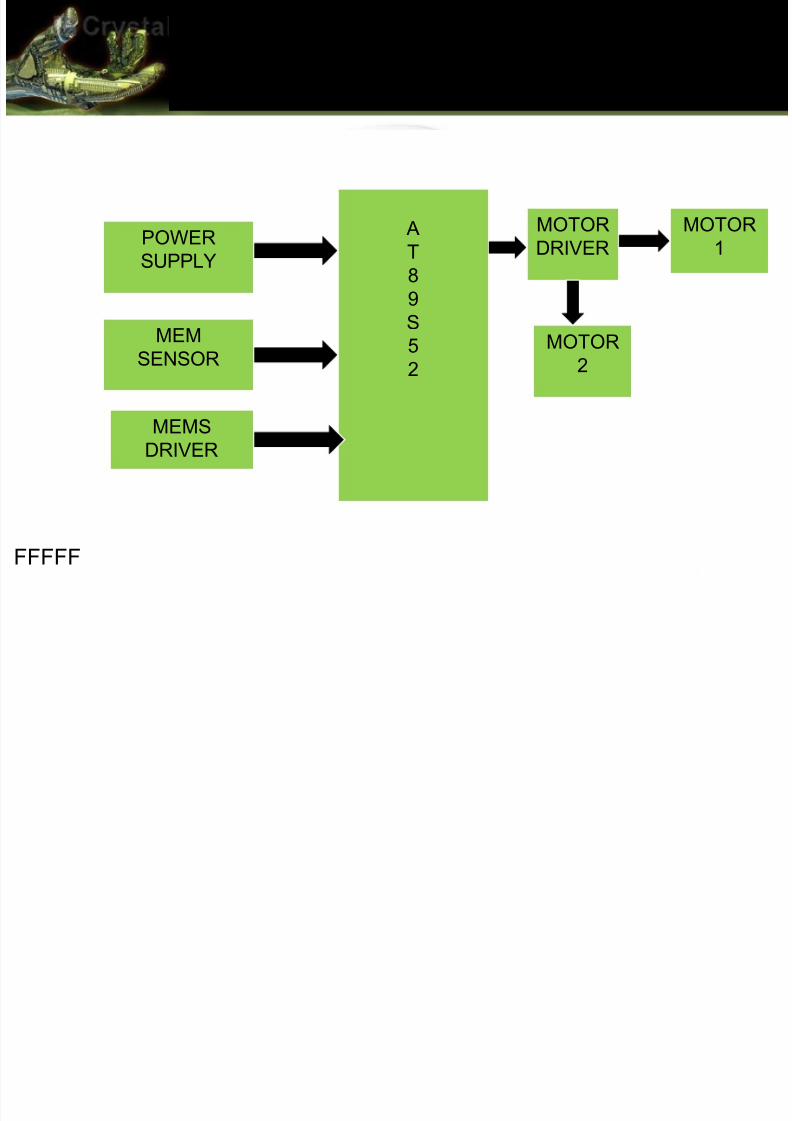
BLOCK DIAGRAM
FFFFF
POWER
SUPPLY
MEM
SENSOR
MOTOR
1
MOTOR
DRIVER
MOTOR
2
A
T
89
S
5
2
MEMS
DRIVER
7/27/2019 MEMS BASED HAND.pptx
http://slidepdf.com/reader/full/mems-based-handpptx 6/19
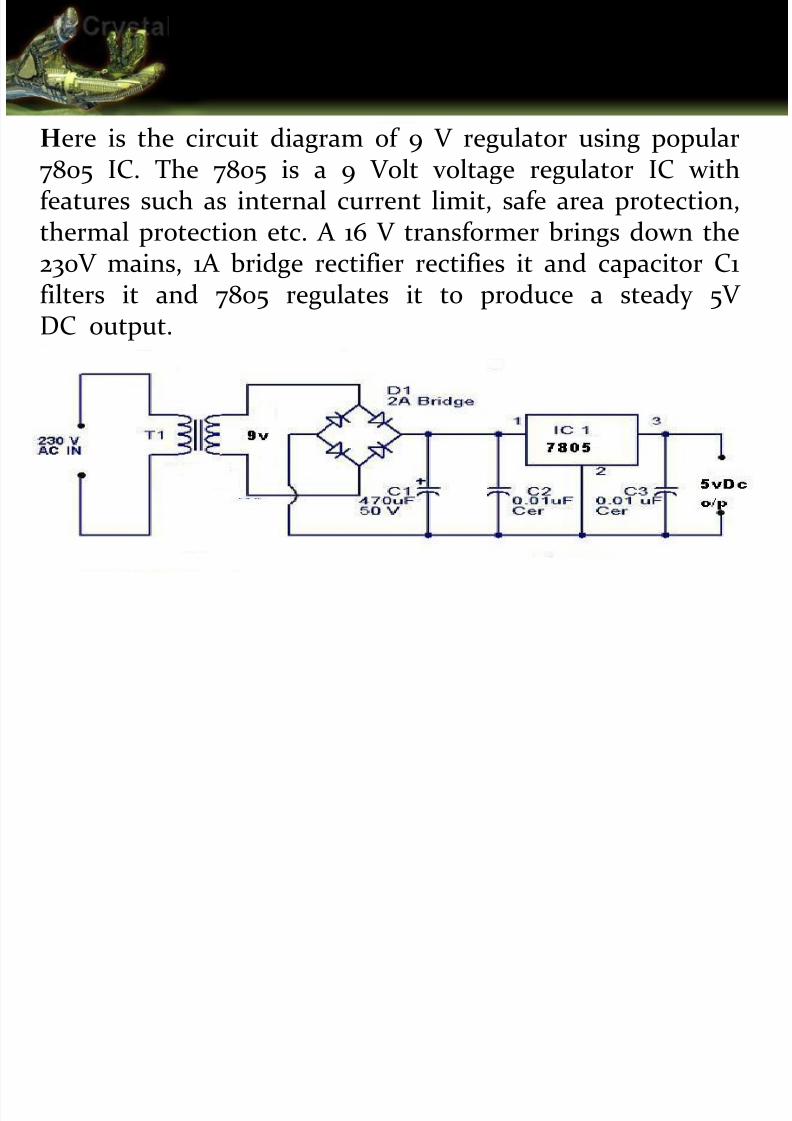
POWER SUPPLY
Here is the circuit diagram of 9 V regulator using popular7805 IC. The 7805 is a 9 Volt voltage regulator IC withfeatures such as internal current limit, safe area protection,thermal protection etc. A 16 V transformer brings down the
230V mains, 1A bridge rectifier rectifies it and capacitor C1filters it and 7805 regulates it to produce a steady 5V DC output.
7/27/2019 MEMS BASED HAND.pptx
http://slidepdf.com/reader/full/mems-based-handpptx 7/19
AT89S52 Microcontroller
The AT89S52 is a low-power, high performance CMOS 8-bitmicrocontroller with 8K bytes of in-system programmableFlash memory. The on-chip Flash allows the programmemory to be reprogrammed in-system or by a conventional
nonvolatile memory pro-grammer. By combining a versatile8-bit CPU with in-system programmable Flash on amonolithic chip, the Atmel AT89S52 is a powerfulmicrocontroller which provides a highly-flexible and cost-effective solution to many embedded control applications.
7/27/2019 MEMS BASED HAND.pptx
http://slidepdf.com/reader/full/mems-based-handpptx 8/19
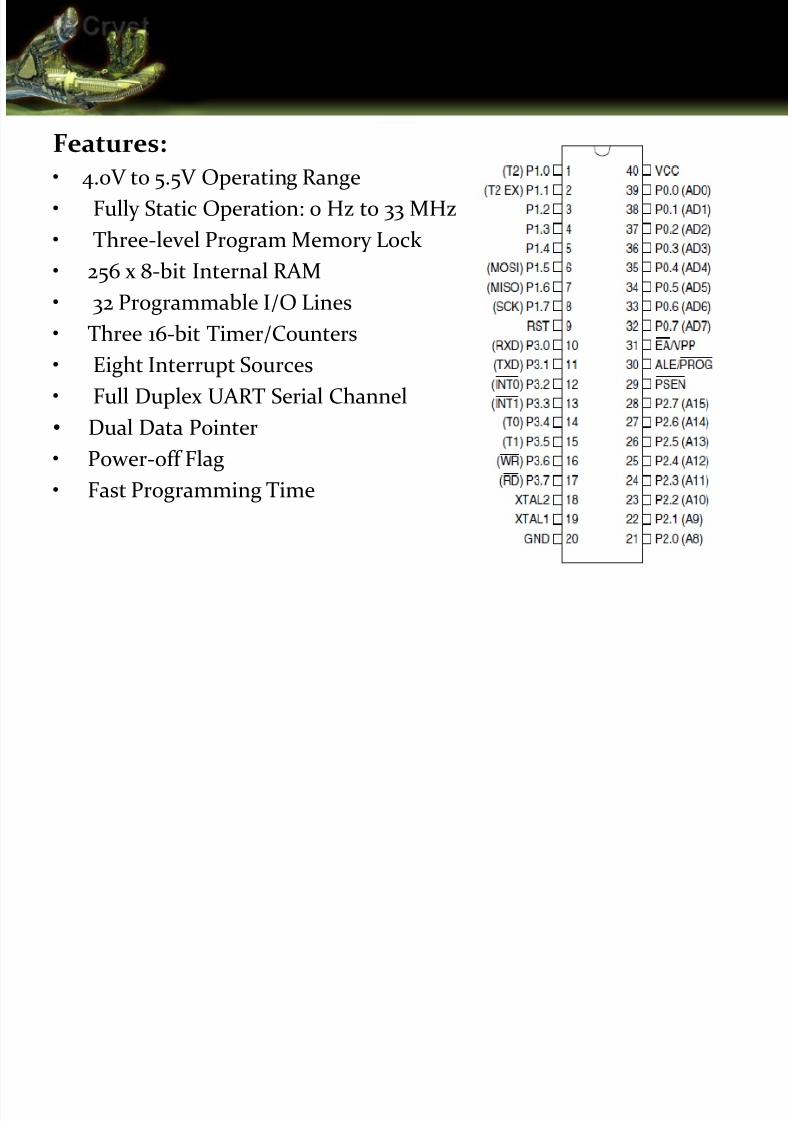
features
Features:• 4.0V to 5.5V Operating Range
• Fully Static Operation: 0 Hz to 33 MHz
• Three-level Program Memory Lock
• 256 x 8-bit Internal RAM• 32 Programmable I/O Lines
• Three 16-bit Timer/Counters
• Eight Interrupt Sources
• Full Duplex UART Serial Channel
• Dual Data Pointer
• Power-off Flag
• Fast Programming Time
7/27/2019 MEMS BASED HAND.pptx
http://slidepdf.com/reader/full/mems-based-handpptx 9/19
MEMS sensor& Driver
Mems sensor:
A micro-Elecromechanical System (MEMS) sensor is usually constructed by similar masking/etching process as microchips.The MEMS sensor's working principle a common MEMS sensoris an accelerometer to measure acceleration. In such a sensor, arelatively large piece of silicon can be suspended by thin piecesand its motion is monitored
7/27/2019 MEMS BASED HAND.pptx
http://slidepdf.com/reader/full/mems-based-handpptx 10/19
o
Mems driver:
It act as medium for both mems sensor and micro controller
and also for actuation and testing of MEMS devices requires
both an amplifier and a signal source. Advanced MEMSprovides a fully integrated line of solutions referred to asMEMS drivers.
7/27/2019 MEMS BASED HAND.pptx
http://slidepdf.com/reader/full/mems-based-handpptx 11/19
Motor driver
The Easy Driver is a simple to use stepper motor driver,compatible with anything that can output a digital 0 to 5V pulse. Easy Driver requires a 7V to 30V supply to power themotor, and has an on board voltage regulator for the digital
interface. Connect a 4-wire stepper motor and amicrocontroller and you've got precision motor control! Easy Driver drives bi-polar motors, and motors wired as bi-polar. I.e.4,6, or 8 wire stepper motors.
7/27/2019 MEMS BASED HAND.pptx
http://slidepdf.com/reader/full/mems-based-handpptx 12/19
MEMS TECHNOLOGY
Micro-Electro-Mechanical Systems, or MEMS, is a technology that in its most general form can be defined as miniaturizedmechanical and electro-mechanical elements (i.e., devices andstructures) that are made using the techniques of micro
fabrication. The one main criterion of MEMS is that there are atleast some elements having some sort of mechanicalfunctionality whether or not these elements can move .The termused to define MEMS varies in different parts of the world. In theUnited States they are predominantly called MEMS, while insome other parts of the world they are called “Microsystems Technology” or “micro machined devices”
7/27/2019 MEMS BASED HAND.pptx
http://slidepdf.com/reader/full/mems-based-handpptx 13/19
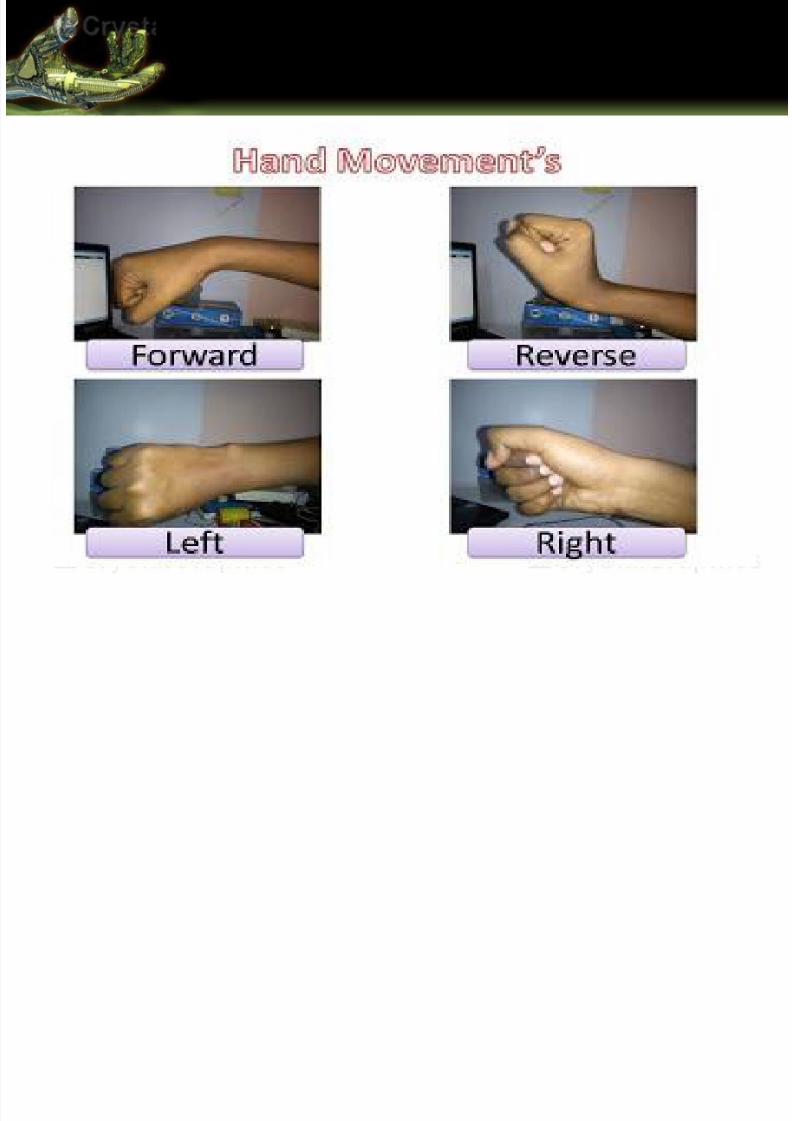
IMPLEMENTATION
A robot can operated actually by using a remote ,but in ourproject robot is operated with the basis of hand gestures. A Gesture Controlled robot is a kind of robot which can becontrolled by your hand gestures not by old buttons. You just
need to wear a small transmitting device in your hand nothingbut mems sensor. This will transmit an appropriate commandto the robot so that it can do whatever we want. Thetransmitting device included a comparator IC for analog todigital conversion and an encoder Ic which is use to encode thefour bit data
7/27/2019 MEMS BASED HAND.pptx
http://slidepdf.com/reader/full/mems-based-handpptx 14/19
it
APPLICATIONS &
7/27/2019 MEMS BASED HAND.pptx
http://slidepdf.com/reader/full/mems-based-handpptx 15/19
APPLICATIONS & ADVANTAGES
ADVANTAGES:1.Easy to operate
2.Low power consumption
3.User friendly
4.One can able to control one’s slave robot just by handgestures by this technology
APPLICATIONS:
1.Plays a major role in helping deaf and dumb people in theirdaily life
2.Can be used as assistance for physically challenged people
3.Military applications
7/27/2019 MEMS BASED HAND.pptx
http://slidepdf.com/reader/full/mems-based-handpptx 16/19
FUTURE SCOPE
Adding zigbee module Adding Gprs and Gps
Adding video camera for live streaming
By connecting bomb detectors and metal detectors
7/27/2019 MEMS BASED HAND.pptx
http://slidepdf.com/reader/full/mems-based-handpptx 17/19
CONCLUSION
This robot is controlled by the hand using MEMS technology,MEMS converts this mechanical hand movement in toequivalent electrical signals and sends it to themicrocontroller. The microcontroller receives this and
controls the robot,and it is user friendly available for all .
7/27/2019 MEMS BASED HAND.pptx
http://slidepdf.com/reader/full/mems-based-handpptx 18/19
7/27/2019 MEMS BASED HAND.pptx
http://slidepdf.com/reader/full/mems-based-handpptx 19/19