mechatronics system designmte401.weebly.com/uploads/1/4/0/7/14075053/2hr15sep14.pdf · course...
TRANSCRIPT

MECHATRONICS SYSTEM DESIGN
(MTE-401) 2 hr Lecture on 15th Sep 2014

COURSE DETAILS
3 Credit hour theory = 3 hours teaching per week
Course Book
Mechatronics Electronic control systems in Mechanical and Electrical engineering (3rd Edition) by W. Bolton
Available in Mechatronics Library
Other useful books (For in depth study)
Mechatronics System Design (2nd Edition, SI) by Devdas Shetty and Richard A. Kolk
The Mechatronics Handbook by Robert H. Bishop
I will email soft copies to CRs.
Course website
www.mte401.weebly.com
All course-works will be submitted via website
All lecture notes will be available on course website

TODAYS LECTURE
Introduction to Mechatronics System Design
Real world examples
Mechatronics Design Approach
Sensors and transducers
Performance Terminology

INTRODUCTION TO MECHATRONICS
SYSTEM DESIGN

SYSTEMS

OPEN LOOP VS CLOSED LOOP SYSTEM

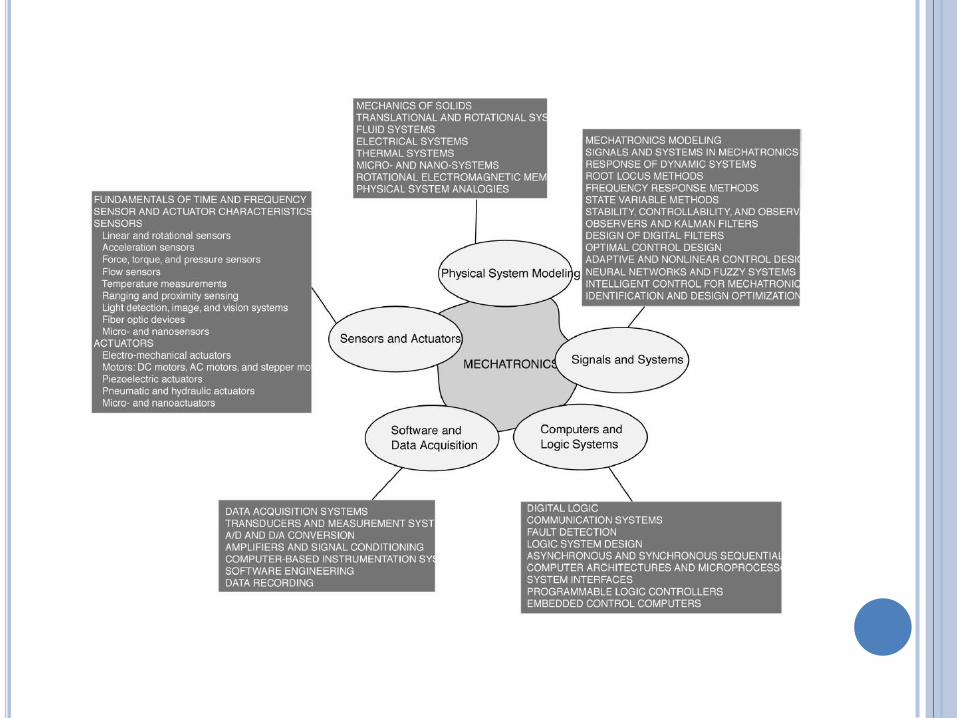
MECHATRONICS KEY ELEMENTS

WASHING MACHINE EXAMPLE

POINT AND SHOOT CAMERA EXAMPLE

MECHATRONICS DESIGN APPROACH

SENSORS AND TRANSDUCERS
A sensor is a device which produce a signal
relating to the quantity being measured.
A transducer is a device which experience a
related change when subjected to some physical
change.
The term sensor and transducers used
interchangeably.
Some measurement systems may use
transducers

PERFORMANCE TERMINOLOGY
Range and Span
The range of a transducer defines the limits between
which the input can vary
Span is difference between the maximum and
minimum value
A load cell can measure the force between 10kN-
100kN. Its range is 10kN to 100kN while its span is
90kN
Error
Error is the difference between the result of a
measurement and the true value of the quantity
being measured.
Error = measured value - true value

PERFORMANCE TERMINOLOGY
Accuracy
Accuracy is the extent to which the value indicated
by a measurement system might be wrong
It is the summation of all possible errors that are
likely to occur
For example, a temperature measurement system be
specified as having an accuracy of ±2°C
Accuracy is often expressed as percentage of full scale
reading (%FSR)
For example a sensor have an accuracy of ±5% of full
scale reading, with the range of 0 – 2000°C, then the
reading given can be expected to be within + or -10°C
of the true reading.

PERFORMANCE TERMINOLOGY
Sensitivity
Sensitivity is the relationship which relates a unit
change in output to a unit change in input.
For example a resistance thermometer may have a
sensitivity of 0.5Ω/°C
The term is often used to measure the sensitivity to
other inputs other than the one being measured. For
example a pressure sensor might have sensitivity to
temperature.

PERFORMANCE TERMINOLOGY
Hysteresis error
Different outputs from
a sensor for the same
input depending on
whether the value has
been reached by
continuous increase or
continuous decrease.
Defined as maximum
difference in output
for increasing and
decreasing value

PERFORMANCE TERMINOLOGY
Non-linearity error
A linear relationship assumed between the input and output of a transducer for its working range.
This assumption lead to non-linearity error
Different methods to find non-linearity error include End range value method
Best straight line for all values
Best straight line through zero point

PERFORMANCE TERMINOLOGY
Repeatability and Reproducibility
Defines as the ability of transducer to give the same
output for repeated application of the same input
value
The error arising from the non-repeatability is often
expressed as a percentage of full scale reading
Stability
It is the ability of a transducer to give same output
when used to measure a constant input over a period
of time.
The term drift is often used to describe the change in
output over the period of time.

PERFORMANCE TERMINOLOGY
Dead band/time
It’s a range of input values for which there is no output.
The dead time is a length of time from the application of an
input until the output begin to respond and changes.
Resolution
Resolution is the smallest change in the input value that
will produce an observable change in the output.
For example a wire-wound potentiometer might have a
resolution of 0.5 degree or as a percentage of full scale
reading.
For digital sensors a smallest change is 1 bit. Thus for a
sensor giving a data word of N bits, (a total of 2N) the
resolution is 1/2N

PERFORMANCE TERMINOLOGY
Output impedance
The output of a sensor needs to be connected with the
other systems
It is essential to know the output impedance of the
sensor so that impedance can be matched with the
interfacing circuit.
Non-matching of impedance can lead to a significant
change in the behaviour of overall system.