mece 4602 - intro to robotics project group g spine needle ...xl2294/documents/a.pdf · 2. proposal...
TRANSCRIPT
MECE 4602 - Intro to Robotics
Project Group G
“Spine Needle Robot”
Professor Aleksandra Popovic
Spring 2012
Team: Xiaoming Lang, Brian Park, Jiali Wei, Hongda Zheng

1
Table of Contents
1. Analysis of Requirements ………………………………………………………….……………………….………… 2
a. Minimal Required Number of DOFs ………………………….…………………………………….… 2
b. Required Workspace ……………………………………………….……………………………………..… 2
c. Estimated Joint Speed ……………………………………….……………………………………………… 2
2. Proposal of Robot Kinematics ……………………….…………….…………………………………………….… 4
3. Kinematics of Robot ………………………………….…….…………………………………………………………… 7
a. Table of DH Parameters ……………………….…………………………………………………………… 7
b. Direct & Inverse Kinematics of Robot …….……………………………………………………….… 7
c. Workspace of Robot ……………………………….……………………………………………………. 10
4. Design of Robot …………………………….…………………….……………………………………………………. 11
a. Lengths & Thicknesses of Links ………………….…………………………………………………… 11
b. Materials for Links ……………………………………………………………………………………….…. 11
c. Computation of Dynamics Equations ……………………………………………………………… 12
d. Estimated Motor Requirements …………………………………………………………………….. 13
e. Types of Sensors Needed …………………………..………………………………………………….. 15
5. Appendix ……………………………………………………………………………………………………………………. 16
a. Matlab code …………………………………………………………………………………………………… 16

2
1. Analysis of Requirements
a. What is the minimal required number of DOFs to complete the task?
The minimum number of DOFs (Degrees of Freedom) is 3 for our spine needle robot. The
degrees of freedom we are dealing with are in the x-, y- and z-axis directions for the
movement of the robot and its links to successfully locate the point where the needle must
be inserted.
b. What is the required workspace?
A workspace here represents a three-dimensional volume of space in which a robot
performs its operations. In our particular case, the required workspace has the form of a
rectangular box that encompasses the spine region of a bigger-sized male (in order to
include all possible lengths and areas of a human spine). As a rough but safe estimate, we
have determined the region to be 100cm long, 25cm wide and 20cm deep.
c. What is the estimated speed of each joint?
We understand that it is quite difficult to figure out the exact values of speeds of each joint;
thus, we have to come up with reasonable estimates on how fast these joints must move.
We have looked particularly at the angular velocities and acceleration of the joints. They
should not be moving at such a high angular velocity and acceleration because doing so
would put too much torque on the joints, which would have a great chance to fail in a short
amount of time. On the other hand, the joints are not to move too slowly for the purpose of
increased time-saving and efficiency of the spine operations. Therefore, an acceptable
middle ground had to be chosen; the following table shows the values of angular velocities
and acceleration of each joint that we have determined:
Joint Angular Velocity (rad/s) Acceleration (rad/s2)
1 0.1 0.2
2 0.1 0.2
3 0.1 0.2
Table 1: Each joint’s angular velocities and acceleration of our choice
Having assumed the above values as our reasonable estimates of angular velocities and
accelerations of the joints, we have calculated the resulting torque that would be placed on
each joint. The results of the calculation is located in Section 4d.

3
The following figures show a few snapshots of the movement of our robot:
Figure 1: Snapshots of the spine needle robot movement

4
2. Proposal of Robot Kinematics
The simple kinematics of our robot is sketched below:
Figure 2: Overall kinematics of the spine needle robot
The most important element to consider when designing this robot was how to exactly find the
spot of a spine at which the needle must be inserted. It is extremely crucial to eliminate any
errors when the point of insertion is to be located because of the sheer gravity and severity of
the cases when the needle goes into the body with even a slight amount of offset, possibly
resulting in a paralysis or even death. Because the operation requires an utmost accuracy and
also since the spine of every patient is not guaranteed to be placed at the same location every
time, an imaging system such as X-ray or Ultrasound are commonly used to ensure that doctors
visually know exactly where the needle must be inserted.
Thus, we have concluded that, since locating the specific spot where the needle is to be inserted
is essential, we must ensure the accuracy with a combination of two methods: a rail on the side
of the operations table and a revolute joint attached to the rail. The rail can be either
automatically controlled by a computerized system or manually moved by a human hand or a
joystick. In either case, the rail must be programmed to have a coordinate system so, as the
robot attached to the rail moves, a computer can accurately track its movement along an axis
and display the current coordinates. That is, once the exact location of the needle insertion is
determined, a revolute joint on the rail is moved back and forth until the robot arm is

5
perpendicular to the point of insertion. If, for some reason, the revolute joint is slightly off from
where it must be or if there are multiple points of insertion, instead of always turning on the rail,
the revolute joint attached to the rail can just be rotated from being perpendicular to having a
certain amount of angle, θ0, in order to make small adjustments or refinements in finding the
exact location. A schematic of this is shown below in Figure 3.
After the robot is aligned with the insertion point, the links, L1 and L2, are used to place the
robot arm right over the insertion point. The angle between L1 and L2 needs to be either
enlarged or reduced to adjust to different distances at which the spine is located from the
revolute joint 0, and the way to do so is using the revolute joints 1 and 2. Based on small
discrepancies among the size and placement of each patient’s spine, the joints automatically
make the adjustments so that, ultimately, the revolute joint 3 will be located directly above the
spot for the needle to be inserted. Then, the needle, which is connected to a prismatic joint 4,
gets inserted vertically into the body and the spine and, after the operation is over, is taken out
perpendicularly again by controlling the movement of this prismatic joint. This is the basic
procedure that our robot follows to place its needle at a specific location on a patient’s body.
Figure 3: Top view of the spine needle robot setting
For our robot, the minimal required number of DOFs to complete an operation, as mentioned in
Part 1a, is 3. Joints 0 through 2 are the basic joints to meet this DOF requirement. However, our
proposed kinematics uses a total number of 5 DOFs, which are from four revolute joints and a

6
prismatic joint for the needle. There are a few factors to why the total number of degrees of
freedom increased from 3 to 5.
Some would think that, for the sole purpose of controlling the x, y and z coordinates of the
robot, the existence of the rail and Joints 3 and 4 are unnecessary and redundant. However,
these components are indispensible for our robot because of several reasons. First of all, the
presence of a rail can expand the workspace of our robot without requiring its arms to be too
long. With the rail, the robot arm would not need to become too horizontal, in which case the
torque would be much greater, in order to reach farther points. Also, the prismatic joint 4 is
necessary because the needle must be vertical. Without it, we cannot control both the position
and the orientation of the needle arbitrarily. The prismatic joint is also good for the robot
because, once it finds the (x, y) position for the needle to be inserted, the other joints can
remain stationary, increasing the stability of the robot (the needle will not change its orientation
due to the recalculation of the inverse kinematics). Therefore, we can control the inserting
process more precisely.

7
3. Kinematics of Robot
a. Write down a table of Denavit-Hartenberg (DH) parameters.
The following table summarizes the DH parameter results of our robot:
Link ai αi di φi
0 0 90° L0 φ1
1 L1 0 0 φ2
2 L2 0 0 φ3
3 L3 90° 0 φ4
Table 2: DH parameters of our robot
b. Compute direct and inverse kinematics of the robot.
Figure 4: x-y coordinates of Joints 1, 2 and 3
Direct Kinematics
As it can be seen from Figure 4, we have assigned each joint an x-y coordinate system. For
direct kinematics, we first find the transformation matrices between the links, which are
shown below:

8
0 0
0 0
01
0
cos 0 sin 0
sin 0 cos 0
0 1 0
0 0 0 1
TL
1 1 1 1
1 1 1 1
12
cos sin 0 cos
sin cos 0 sin
0 0 1 0
0 0 0 1
L
LT
2 2 2 2
2 2 2 2
23
cos sin 0 cos
sin cos 0 sin
0 0 1 0
0 0 0 1
L
LT
3 3 3 3
3 3 3 3
34
cos 0 sin cos
sin 0 cos cos
0 1 0 0
0 0 0 1
L
LT
Having found all of the transformation matrices, the complete matrix for the entire
transformation comes out to be:
1 2 3 0 0 1 2 3 0 0 1 1 2 1 2 3 1 2 3
1 2 3 0 0 1 2 31 2 3 0 0 0 1 1 2 1 2 3 1 2 3
04
1 2
cos( )cos sin sin( )cos cos ( cos cos( ) cos( ))
cos( ) cos( + + )cos( )sin cos sin ( cos cos( ) cos( ))
2 2
sin( +
L L L
L L LT
3 1 2 3 0 1 1 2 1 2 3 1 2 3) 0 cos( ) sin sin( ) sin( )
0 0 0 1
L L L L
Inverse Kinematics
It has been assumed that it is possible to find the exact coordinates of the needle
insertion point with respect to the origin set up on the operations table through various
methods. In other words, once Link 0 is fixed on the rail, we have information of the
exact coordinates of not only Link 0 but also where the needle has to be placed.
Figure 5: The spine needle robot system in the coordinate system view

9
For Link 0: = arctan(x/y)
For Links 1 & 2:
The inverse kinematics requires a few variables to be designated. Figure 6 below
visually displays what each variable represents in our system.
As for the calculation of inverse kinematics, we know the transformation matrix from
Link 1 to 3 is,
1 2 1 2 1 1 2 1 2
1 2 1 2 1 1 2 1 2
13
cos( ) sin( ) 0 cos cos( )
sin( ) cos( ) 0 sin sin( )
0 0 1 0
0 0 0 1
L L
L LT
1 1 2 1 2
1 1 2 1 2
cos cos( )
sin sin( )
L L r
L L z
where x2+y2=r2
So after solving these two equations, we get,
2 2 2 2
1 21
2 2
1
2 2 2 2 2 2 2 2
2 1 1 22
2 2 2 2
2 1
arctan arctan2
arctan arctan2 2
r z L L z
rL r z
r z L L r z L L
L r z L r z
Figure 6: Defining the variables of inverse kinematics

10
For Link 3:
We need to put the needle at a vertical (perpendicular) orientation, so
. Thus,
For Link 4:
The function of Link 4 is to put the needle into the body; therefore, we do not need to
solve it in the positioning process.
c. What is the workspace of this robot? Does it have a dexterous workspace?
Our robot has two types of workspace combined into one. For the first type, when Joint 0
moves along the rail without rotating, the workspace of the robot would be a cylinder.
When the rail stops and Joint 0 is fixed on the rail, however, the robot would have a
spherical workspace in which the robot is allowed to rotate due to Joint 0. These two cases
may take place simultaneously for our robot.
Our robot has a dexterous workspace, it is part of the central line of link 0 being symmetric
to the center of link 1. The half length of this line is L1+L2-L3. The needle can reach points on
this line from every direction.
Figure 7: Workspace of the rpbot
11
4. Design of Robot
a. Propose lengths and thicknesses of all links.
We assume that the distance the robot should cover safely to reach the spine area is about
70cm, having determined proper dimensions of the operations table to be 2m long and 1m
wide. As a side note, the arc or the semicircular area of the robot arm is ignored in our
project due to the presence of a rail with which we can have a close-to-perfect alignment of
Joint 1 and the needle insertion point.
Next, we chose L1 = L2 = 45cm and this value ensures two things: 1) the robot arm can cover
all regions of the operations table, and 2) the angle between the two links is not too large
for the torque to be over an allowable limit, which can lead to a possible failure or fracture
of the links.
For Link 0, we choose L0 to be 25cm. Compared to the other values, this length does not
take on too much of an importance because we have the prismatic joint (Joint 4), which
enables us to adjust the vertical position of the needle, if necessary. But in order to not
make the link reasonable, we finally chose 25cm as its length.
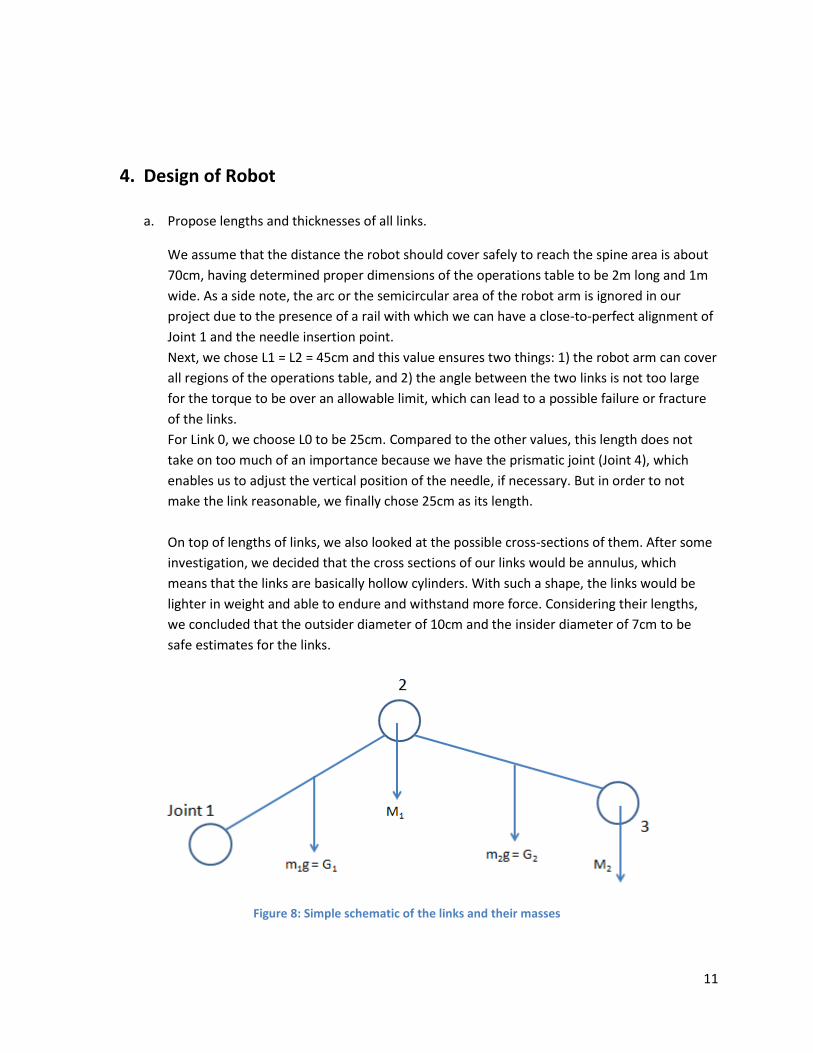
On top of lengths of links, we also looked at the possible cross-sections of them. After some
investigation, we decided that the cross sections of our links would be annulus, which
means that the links are basically hollow cylinders. With such a shape, the links would be
lighter in weight and able to endure and withstand more force. Considering their lengths,
we concluded that the outsider diameter of 10cm and the insider diameter of 7cm to be
safe estimates for the links.
Figure 8: Simple schematic of the links and their masses

12
b. Propose a material you want to use for the links.
We chose aluminum as the material of our robot. As mentioned above, the main goals of
the manufacturing of our robot is to build a light but strong product. Using aluminum would
result in a product that is not be too heavy to put much unnecessary pressure and force on
the operations table and the motors and also can provide a sufficient amount of strength to
avoid any fracture or breakdown.
c. Compute all dynamic equations (force propagation) for the robot.
Velocity Propagation:
1
1
0
0
,
2 21 1
2 1 2
0 0
0 0R
,
3 32 2
3 1 2 3
0 0
0 0R
So the velocity of each joint is:
1
0
0
0
v
,
2 1
2 21 1 1 12 1 1
0
( )
0
v R v t L
,
1 1 1
0 2
2 12 2 1 1 1
sin
cos
0
L
v R v L
1 1 2
3 2
3 32 2 2 23 2 1 2 2 1 1 2
sin
( ) cos
0
L
v R v t L L L
2 1 1 2 2 2 1 2 1 1 1
0 3
3 12 23 3 2 1 1 2 2 2 1 2 1 1 1
sin( ) sin( ) sin( )
cos( ) cos( ) cos( )
0
L L L
v R R v L L L
The velocities of Link 1 and 2 are,

13
1 1 1
0
2 1 1 1
sin
2
cos1
2 2
0
L
v Lvc
1 1 1 2
0 3
2 3 2 1 2 2 1 1 1 1 1 2
(sin sin )
2
cos cos2
2 2
0
L
v v L L L Lvc
With these velocities known, we could then obtain the kinetic energy and potential energy
using the following formulas:
Kinetic Energy:
0 0 0 0
1 2 2 2 3 3 1 2
1( ( ) ( ) ( 1) 1 ( 2) 2)
2
T T T TK m v v m v v g vc vc g vc vc
Potential Energy:
21 1 1 1 2 2 1 2 1 1 2 1 2 1 1
1( ) sin ( sin( ) sin ) ( sin( ) sin )2 2
LP G M L M L L G L
Since Lagrange Equation is known,
L K P
Torques for Motor 1 and 2 can be acquired using the following equations:
1
1 1
d L L
dx
,
2
2 2
d L L
dx
After we calculated and obtained all of the parameters, we then used Matlab to find the
values of the torque (a complete Matlab code can be found in the Appendix).
d. Estimate the requirements for motors. Find appropriate motors for this task.

14
Though our robot is a fairly small-sized one with only a handful of joints, the motors
attached to each joint would vary based on the torque required, weight of the links and
several other factors. Thus, according to their different situations and requirements, we
have researched and determined the most suitable motors for each of our robot’s joints.
Motor 0:
Motor 0 will not encounter too much torque and its weight is also not very important
because it is fixed on the rail. Thus, we selected 2642 012CXR.
Motors 1 & 2:
In order to specify which motors to use on Joints 1 and 2, we first look at their
parameters determined previously:
Link 1 Link 2
Length (m) 0.45 0.45
Outside Diameter (m) 0.10 0.10
Inside Diameter (m) 0.07 0.07
MaterialAluminum (density, ρ
= 2700 kg/m3)
Aluminum (density, ρ
= 2700 kg/m3)
Table 3: Parameters previously determined
Also, we calculated a few unknown parameters shown below:
Link 1 Link 2
Mass (kg) 1.549 1.549
Largest Angle (deg) 30 -60
Max Angular Velocity (rad/s) 0.1 0.1
Max Angular Acceleration (rad/s2) 0.2 0.2
Table 4: Calculated parameters
In addition to the calculated values above, another parameter needed to be determined:
torque of motors. However, since we had not specified which motors to use for each joint,
we decided to assume reasonable weight values for the motors such as 0.4 kg for Motor 2
and 0.3 kg for Motors 3 and 4. Having the knowledge of how heavy a typical motor to be
attached to a revolute or prismatic joint is, we chose a slightly higher value for Motor 2
because we believed that the possible torque that Joint 2 would experience is the greatest
out of all joints. Joint 2 connects L1 and L2 and, in case the angle between the two links
becomes large, there will be a great amount of torque applied to the joint. This is why we
have assigned a higher weight value to Motor 2, which will be attached to Joint 2.

15
With the assumed weights of motors, we can acquire the torques of Motors 1 & 2,
Torque1 = 21.22 Nm
Torque2 = 6.85 Nm
Since the moving speed of the robot is pretty slow, the stall torque and weight are the most
important factors in motor selection. We initially considered brushless DC motors; however,
we did not find any suitable ones that provide enough torque. So, we finally chose DC
motors from www.micromo.com.
Among more than 30 different DC motors on the website, we chose 3 candidates, whose
essential specifications are shown below, of our robot. The online links of these motors are
provided as well.
Motor Stall Torque (mNm) Weight (g)
3863 012C 1200 400
3272 012CR 1192 312
3257 048CR 547 242
Table 5: Specifications of motors considered for Joints 1 and 2
3863 012C: http://www.micromo.com/Micromo/DCMicroMotors/3863_C_DFF.pdf
3863 012CR: http://www.micromo.com/Micromo/DCMicroMotors/3272_cr_dff.pdf
3257 048CR: http://www.micromo.com/Micromo/DCMicroMotors/3257_CR_DFF.pdf
Actually, all of them have met the torque requirements with suitable gearhead. However,
3272 012CR motor has the largest torque/weight ratio, which is an important criterion for
our application. Therefore, after much consideration, we have chosen this particular motor
to be used for our robot.
Along with this motor, we chose 38A as the gearhead in order to increase the total torque.
For Motor 1, we use 3 gear stages and the reduction ratio of 36:1 while, for Motor 2, we use
2 gear stages and the reduction ratio of 12:1. Therefore, they can both provide enough stall
torque without exceeding the assumed weight above.
Motor 3:
The torque of Motor 3 can be smaller than others so 2657 012CR motor and 26A
gearhead will be sufficient.
Motor Stall Torque (mNm) Weight (g)
2657 012CR 278 156
Table 6: Specifications of the motor considered for Joint 3

16
2657 012CR: http://www.micromo.com/Micromo/DCMicroMotors/2657_CR_DFF.pdf
Motor 4:
Motor 4 is a linear motor and its peak force should be at least 10N to effectively insert
the needle into the spine according to the project requirements. It also must be quite
light in weight not to put too much force and weight on the joint to which the needle is
attached. A further research has shown us that LM 1247 060 01 motor meets the criteria
very well. The specifications and the online link of the motor is shown below:
Motor Peak Force (N) Weight (g)
LM 1247 060 01 10.7 67
Table 7: Specifications of the motor considered for Joint 4
LM 1247 060 01: http://www.micromo.com/Micromo/DCMicroMotors/2657_CR_DFF.pdf
e. What kind of sensors would you add to your robot? Where? Why?
The two most important factor we need to control are the position and the inserting force
and speed. The linear motor controller can tell us the inserting force and speed, so we do
not need some other sensors. And the X-ray device can be our sensor to some extend
because our need to get feedback from it to know what the precise position of the needle is
in real time to avoid dangerous circumstance cause by the control error or some other
reasons.

17
5. Appendix
a. Matlab code
function [ output_args ] = SpineNeedle( input_args )
syms th0 th1 th2 th3; syms d1 d2 d3; syms a1 a2 a3; syms L0 L1 L2 L3 D1 D2; syms m1 m2 g1 g2; syms M1 M2 G1 G2;
%Transformation Matrix T01=[cos(th0) 0 sin(th0) 0; sin(th0) 0 -cos(th0) 0; 0 1 0 L0; 0 0 0
1] T12=[cos(th1) -sin(th1) 0 L1*cos(th1); sin(th1) cos(th1) 0
L1*sin(th1); 0 0 1 0; 0 0 0 1] T23=[cos(th2) -sin(th2) 0 L2*cos(th2); sin(th2) cos(th2) 0
L2*sin(th2); 0 0 1 0; 0 0 0 1] T34=[cos(th3) 0 sin(th3) L3*cos(th3); sin(th3) 0 -cos(th3)
L3*sin(th3); 0 1 0 0; 0 0 0 1]
T21=inv(T12); T32=inv(T23);
R12=[cos(th1) -sin(th1) 0; sin(th1) cos(th1) 0; 0 0 1]; R23=[cos(th2) -sin(th2) 0; sin(th2) cos(th2) 0; 0 0 1]; t12=[L1*cos(th1);L1*sin(th1);0]; t23=[L2*cos(th2);L2*sin(th2);0];
R21=inv(R12); R32=inv(R23);
%Direct Kinematics: T13*[position in frame 3]=[position in frame 1] T13=(T12*T23) T04=simplify(T01*T12*T23*T34)
T31=(T32*T21); T13*[-L2/2;0;0;1]; T12*[0;0;0;1];
%Velocity Propagation w1=[0;0;d1]; w2=R21*w1+[0;0;d2]; w3=R32*w2+[0;0;d3];
v1=[0;0;0]; v2=simplify(R21*(v1+cross(w1,t12))) v3=(R32*(v2+cross(w2,t23))); %in their own frame
v2x=(R12*v2);

18
v3x=(R12*R23*v3); vc1=(1/2*v2x); vc2=simplify(1/2*(v2x+v3));
%Dynamics
K=1/2*(m1*transpose(v2x)*v2x+m2*transpose(v3x)*v3x+g1*transpose(vc1)
*vc1+g2*transpose(vc2)*vc2); P=(0.5*G1+M1)*L1*sin(th1)+M2*(L2*sin(th1 + th2) +
L1*sin(th1))+G2*( (L2*sin(th1 + th2))/2 + L1*sin(th1)); L=K-P;
%Motor 1 A=simplify(diff(L,d1)); B=simplify(diff(L,th1));
Torque1=(diff(A,d1)*a1+diff(A,d2)*a2+diff(A,th1)*d1+diff(A,th2)*d2)-
simplify(diff(L,th1));
%Motor 2 E=simplify(diff(L,d2)); F=simplify(diff(L,th2));
Torque2=(diff(E,d1)*a1+diff(E,d2)*a2+diff(E,th1)*d1+diff(E,th2)*d2)-
simplify(diff(L,th2));
L1=0.45; L2=0.45; D1=0.1; D2=0.07; p=2700; m1=(D1^2-D2^2)/4*p*L1; m2=(D1^2-D2^2)/4*p*L1; g1=0.4; g2=0.6; M1=m1*9.8; M2=m2*9.8; G1=g1*9.8; G2=g1*9.8;
th1=30/180*pi; th2=-60/180*pi; d1=0.1; d2=0.1; a1=0.2; a2=0.2;
subs(Torque1) subs(Torque2)
end