mecanique generale chapitre vii : equations de lagrange
TRANSCRIPT

MECANIQUE GENERALE
CHAPITRE VII : EQUATIONS DE LAGRANGE,EQUATIONS D'APPEL
Cours
Auteur de la Ressource PédagogiqueJ-P. BROSSARD
3, 4 et 5 GMC
Année de création : 1994

© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

S O M M A I RE
1ÈRE PARTIE : ÉQUATIONS DE LAGRANGE
7.1.1 L'EQUATION DE DfALEMBERT EN DYNAMIQUE 462
7.1.2 DEFINITIONS : ELEMENTS VIRTUELS 462
A. Vitesse virtuelle 462
B. Transformation virtuelle ; intervalle de temps virtuel 462
C. Puissance virtuelle 463
7.1.3 VITESSES VIRTUELLES COMPATIBLES AVEC LES LIAISONS TELLES QU'ELLES 464EXISTENT A L'INSTANT t
A. Configuration du système à l'instant t 464
B. Liaisons imposées au système 464
C. Déplacement virtuel élémentaire le plus général 465
D. Vitesse virtuelle la plus générale 466
E. Vitesse virtuelle compatible avec les liaisons telles qu'elles 466existent à l'instant t
F. Exemples 467
G. Intérêt des transformations virtuelles compatibles avec les liaisons 470telles qu'elles existent à l'instant t
7.1.4 PUISSANCE VIRTUELLE DEVELOPPEE PAR LES ACTIONS MECANIQUES 471
A. Forme générale de la puissance 471
B. Calcul de la puissance virtuelle dans quelques cas remarquables 472
1. Puissance virtuelle développée par les actions mécaniques appli- 472quées à un solide dans une transformation virtuelle compatibleavec les liaisons telles qu'elles existent à l'instant t
2. Puissance virtuelle développée par les forces de cohésion d'un 473solide parfait dans une transformation virtuelle compatible
3. Puissance virtuelle développée par les forces de liaison inté- 474rieures entre solides dans une transformation virtuelle compa-tible
4. Puissance virtuelle développée par les actions de liaison exté- 474rieures appliquées à un solide dans une transformation virtuellecompatible
5. Liaisons parfaites au sens de GAUSS 475
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

C. Cas où la puissance virtuelle peut être calculée à partir de 475certaines fonctions
1. Il y a fonction de force généralisée 475
2. Fonction dissipation ou fonction de RAYLEIGH 476
3. Généralisation de la fonction de dissipation. Fonction puis- 481sance ty
7.1.5- PUISSANCE VIRTUELLE DEVELOPPEE PAR LES QUANTITES D'ACCELERATION 484
A. Transformations préliminaires fondamentales 485
B. Exemple 485
C. Calcul des coefficients A£ 487
D. Expression de la puissance virtuelle développée par les quantités 487d'accélération
E. Exemple : calcul des coefficients Aj[ dans le cas de la balance de 489KELVIN
7.1.6 FORME GENERALE DES EQUATIONS DE LAGRANGE 491
7.1.7 EQUATIONS DE LAGRANGE POUR UN SYSTEME A PARAMETRES INDEPENDANTS 492
A. Cas où l'on a affaire à un système de solides parfaits, liaisons 492parfaites au sens de GAUSS
B. Cas particulier où la transformation est une transformation vir- 496tuelle compatible avec les liaisons telles existent à l'instant t,les liaisons étant parfaites au sens de GAUSS, et où il y a enoutre fonction de force généralisée pour les forces données :Lagrangien du système
Exemple 1 : Pendule d'EULER 497
Exemple 2 : Problème de LAGRANGE-POISSON. Mouvement d'une toupie 499symétrique autour d'un point fixe
Exemple 3 : Mouvement à force centrale, la loi étant attractive 503newtonienne
Exemple 4 : Double pendule 504
C. Cas particulier où la transformation virtuelle est une transforma- 506tion virtuelle compatible avec les liaisons telles qu'elles exis-tent à l'instant t, mais où les liaisons ne sont pas parfaites ausens de GAUSS et donnent lieu à une fonction de dissipation
Exemple
D. Condition générale pour avoir une fonction génératrice L. Fonction 510de force indépendante des vitesses
Exemple : Lagrangien d'une charge q en mouvement dans un champ 511électromagnétique
E. Intégrales premières 513
1. Intégrales premières linéaires en q{ 513Exemple : oscillateur harmonique à 2 dimensions
2. Intégrales premières quadratiques : Intégrale de Painlevé 515
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

7.1.8 LES PARAMETRES NE SONT PAS INDEPENDANTS MAIS LIES PAR DES RELATIONS 524HOLONOMES OU NON HOLONOMES
A. Intérêt d'une transformation virtuelle compatible avec les 524liaisons telles qu'elles existent à l'instant t
B. Equations de LAGRANGE avec multiplicateurs 525
C. Exemples de mise en équation et de résolution 528
Exemple 1 : Comportement d'un système formé d'un essieu et de 528deux roues dont l'une roule sans glisser sur un plan
Exemple 2 : Mécanisme à coulisse 534
D. Signification générale des multiplicateurs 538
E. Précision sur l'origine de l'irréductibilité lorsqu'on a des 539liaisons non holonomes
F. Intégrales premières 544
7.1.9 UTILISATION DES EQUATIONS DE LAGRANGE POUR DETERMINER LES INCONNUES 545DYNAMIQUES (ACTIONS DE LIAISON)
A. Exemple de détermination de liaisons 545
B. Détermination des actions intérieures à un solide 548
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

2ÈME PARTIE 1 ÉQUATIONS D'APPEL
7.2.1 ENERGIE D'ACCELERATION 551
A. Définition 551
B. Théorème de Koenig pour l'énergie d'accélération 551
C. Energie d'accélération d'un solide ayant un point fixe 552
D. Théorème de Koenig pour le solide 555
E. Exemple de calcul d'énergie d'accélération 556
7.2.2 CALCUL DES COEFFICIENTS A£ DE LA PUISSANCE VIRTUELLE A PARTIR DE 559L'ENERGIE D'ACCELERATION
7.2.3 EQUATIONS D'APPEL LORSQUE LES PARAMETRES SONT INDEPENDANTS 560
7.2.4 EQUATIONS D'APPEL LAGRANGE POUR LES SYSTEMES A LIAISON SANS REDUCTION 565AU NOMBRE MINIMUM DE PARAMETRES
A. Cas général 565
B. Cas particulier : les liaisons sont parfaites et les solides sont 565parfaits
7.2.5 EQUATIONS D'APPEL AVEC UN NOMBRE MINIMUM DE PARAMETRES. FORME SPECI- 565FIQUE
A. Rappel 565
B. Calcul des coefficients A£ par la méthode d'Appel 566
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

1ÈRE P A R T I E
LES E Q U A T I O N S D E L A G R A N G E
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
- 461 -
Les équations que nous allons obtenir ne sont pas de nouvelleséquations, elles sont déduites de la loi fondamentale. Le but poursuivipar LAGRANGE est clairement formulé dans sa préface à la première édition :"on a déjà plusieurs Traités de Mécanique,, mais le plan de celui-ci est en-tièrement neuf. Je me suis proposé de réduire la théorie de cette scienceet l'art de résoudre les problèmes qui s'y rapportent* à des formules géné-rales dont le simple développement donne toutes les équations nécessairespour la solution de chaque problème. J'espère que la manière dont j'aitâché de remplir cet objectif ne laissera rien à désirer.
Cet ouvrage aura d'ailleurs une autre utilité : il réunira etprésentera sous un même point de vue les différents principes trouvésjusqu'ici pour faciliter la solution des problèmes de mécanique et montrerala liaison et la dépendance mutuelle^ et mettra à portée de juger de leurjustesse et de leur étendue". (1)
Jusqufà LAGRANGE, les méthodes n'avaient guère d'unité. LAGRANGEpropose très clairement d'obtenir une formulation globale et unique pourtous les problèmes de mécanique. La méthode est basée sur l'utilisation desvitesses virtuelles dont l'emploi est bien antérieur à LAGRANGE, en parti-culier dans la théorie des machines simples.
Les équations de LAGRANGE donnent souvent une mise en équationplus rapide que les théorèmes généraux. Par contre elles sont généralementd'un emploi moins commode lorsqu'il s'agit de déterminer des actions deliaison inconnues. En outre, elles sont parfois remarquablement adaptéespour certains problèmes particuliers (petits mouvements, vibrations, inté-grales premières ...). Leur connaissance parfaite est absolument nécessaireà tout ingénieur et plus généralement à tout physicien.
(1) J.L. LAGRANGE "Mécanique Analytique11 Tome 1. Réédité par A. BLANCHARD,9 rue Médicis PARIS 6°.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 462 -
7.1.1 L'EQUATION DE D'ALEMBERT EN DYNAMIQUE
La loi fondamentale pour un point matériel P de masse dm apparte-nant à un système (Z) s'écrit
—> —t -Ke)dFe + dFi = JJ^J dm
dFe représentant l'action "extérieure11 au système auquel appartient PdFi représentant l'action "intérieure11, c'est à dire l'action sur (P)
des autres éléments de (I)J (P) accélération du point P dans un repère galliléen
II est évident que l'on peut multiplier les deux membres de l'équa-tion fondamentale par un vecteur V. . à priori arbitraire. On obtient ainsil'équation de d'ALEMBERT pour un point matériel
dFe.V*(P) + dFÎ.V*(P) = Jg(P).V*(P) dm
Pour tout le système (£) on aura l'équation de d'ALEMBERT d'unsystème matériel en faisant la somme pour les différents points appartenantau système :
r , _, ^ F , ^ r , .dFe.V*(P) + oTi.V*(P) = J8(P).V*(P) dm 1.3
pez pei pez
L'intérêt de la méthode -apparaît si l'on songe que l'on peutobtenir deux résultats par un choix convenable de V* :
l/ donner une formulation systématique du calcul des 3 intégrales(au point de vue mathématique les deux premières sont de mêmenature)
2/ par un choix convenable de V*(P) éliminer certaines actions méca-niques de l'équation de d'ALEMBERT.
7.1.2 DEFINITIONS : ELEMENTS VIRTUELS
A. Vitesse virtuelleDans la région entourant P on définit le champ V*(P) géométrique
indépendant de tout caractère mécanique. Ce chmap que nous particulariseronspar la suite est appelé champ de vitesse virtuelle.
On dit que dans un certain domaine (D) de l'espace on a définiun champ vectoriel si à tout point P de (D) on sait faire correspondre unvecteur A = A(x^y^z^t) bien déterminé.
B. Transformation virtuelle. Intervalle de temps virtuel
A l'instant t le système peut être représenté par une certainefigure géométrique (F). Cette figure étant tracée, considérons le scalaireÔT infiniment petit et associons à tout point (P) de (F) un point (P*)- telque
PP* = V*(P).6i
Ce qui à la figure (F) fait correspondre la figure (F*)
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

Système à l'instant t : Système transformé :figure (F) figure (F*)
La transformation ainsi définie est dite transformation virtuelleassociée au champ V*(P). Le scalaire 6r est appelé intervalle de temps_^vir-tuel et PP* déplacement virtuel (ceci par analogie avec le cas où V* = V8(P)et dt = 0).
On notera en général le déplacement virtuel par PP = 6Pce qui donne _^ r-&
*•<» • iRemarque : C'est une transformation du genre que nous avons l'habitude defaire en géométrie pour transformer une figure. Mais si la transformationest purement géométrique oe sont des considérations de mécanique qui déci-deront du choix du champ qui pour l'instant est complètement arbitraire.
C. Puissance virtuelle
Soit une action mécanique représentée par le vecteur F. On appellepuissance virtuelle développée par la force F associée au champ V*(P) leproduit scalaire /fîfiy* = $ . fa(p)
^Là encore le vacable est choisi par analogie avec le cas où V*(P) = V (P),(f)/U* = puissance réelle développée par F.
Comme conséquence de cette définition on peut donc logiquementposer
dFe . V*(P) =ç_X* puissance virtuelle développée parP€Z les actions mécaniques extérieures
appliquées au système (S)
r . tâÔ*dFi . V*(P) =LX: puissance virtuelle développée par
pp., les actions mécaniques intérieuresau système (£)
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 464 -
Je . V"*"(P)dm t-Qe puissance virtuelle développée par-•3-, les quantités d'accélérationirez*
L'équation de d'ALEMBERT s'écrit alors
*-S ex " ^ in t~
ThéorèmeLa puissance virtuelle développée par toutes les actions mécani-
ques dans une transformation virtuelle quelconque est égale à la puissancevirtuelle développée par les quantités dfaccélération.
Nous allons nous préoccuper maintenant du calcul d&s* ±y. $*'*•ex in
7.1.3 VITESSES VIRTUELLES COMPATIBLES AVEC LES LIAISONS TELLES QU'ELLES EXISTENTA L'INSTANT t
Nous allons étudier dans ce chapitre une classe particulière detransformations virtuelles : celles que l'on peut réaliser tout en respec-tant les liaisons imposées au systèmes. Nous verrons qu'elles ont des pro-priétés remarquables.
A. Configuration du système à l'instant t
Dans tout ce qui suit on admettra que l'on peut exprimer la con-figuration du système à l'aide de n(*) paramètres q^, q2 ••• q£ .... qn- Cequi signifie que la position de tout point P appartenant au système est dé-finie par __^ _^
OP = OP (qi ... qj ... qn> t)
* Remarquons que l'emploi de n paramètres n'est peut-être pas nécessaire.Nous nous étendrons ultérieurement très longuement sur ce point.
B. Liaisons imposées au système
Nous avons classé les liaisons en deux catégories principalessuivant la nature des équations qui s'y rapportent : (chapitre 6 - cours,p. 332)
a) Liaisons holonomes
Supposons leur nombre égal à h,elles sont de la forme
f1 (qi ••• qi ••• qn» t) = oh relations f4 (q ... q.[ ••• qn> t) - 0
fh toi ••• qi ••• q^ ù) = Q
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 465 -
b) Liaisons non holonomes
Supposons leur nombre égal à 1. Elles sont de la forme
anqi + ... anq[ ... + alnq^ = bi
1 relations ajiql + ... a^q* ••• + ajn n = bj
aliqj + ... auq' ... + alnq^ = bl
Le degré de liberté formel est donc k = n - (h + 1)
Les liaisons peuvent dépendre ou non du temps. On emploie parfois en méca-nique analytique le langage suivant :
- le système est dit skléronome lorsque le temps ne figure pas explicite-ment dans les équations de liaison
- le système est dit rhêonome lorsque le temps figure explicitement dansles équations de liaison.
La distribution entre liaisons holonomes et liaisons non holonomestient une grande place dans la théorie des équations de LAGRANGE.
C. Déplacement virtuel élémentaire le plus gênerai
On obtient le déplacement virtuel élémentaire le plus général encalculant l'accroissement À? de 0$ lorsqu'on fait varier les q^ des quantitésAqi (le temps n'intervient pas car la transformation est une transformationgéométrique à l'instant t)
À? = f~- Aqi +. . . . * |~~ Aq£ + . . . + ~~ Aqn -H tx Aqi + .. . + tn Aqn
| | —>• 0 quand /qj + ... + Aq^ ^ 0
£ I ei I'A^i étant un infiniment petit d'ordre supérieur par rapportà Ap = /Aq^ + ,.. + Aq^
Mais comme nous avons totale liberté de choix pour le déplacement virtuel,nous simplifierons considérablement le problème du point de vue mathématiqueen choisissant pour P le plus général la partie linéaire de l'accroissementc'est à dire la différentielle de OP
i. jyp 3p pvp6? . |_6qi + ... «qi* ... +^^n
Le sjrmbole ftôf! est substitué au S3nnbole "d" pour éviter toute ambiguité avecles déplacements réels.
Le choix de déplacements infiniment petits est justifié par lesouci de pouvoir utiliser la théorie des différentielles.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 466 -
D. Vitesse virtuelle la plus générale
On définit le champ de vitesse virtuelle le plus général par
*<» - g.«•«••. **<» • &«i'*-**r«!•*••• *!!;«;•en posant q[* « -jspî- ôqi >• 0 quand ÔT —^ 0
Les q|* sont appelés vitesses généralisées
Remarque 1. La vitesse réelle du point P serait
w • Hr"*- +lr<; + -*!; !fLe déplacement réel ne fait partie de l'ensemble des déplacements virtuelsque si && = Q, c'est à dire si les liaisons sont indépendantes du temps.
<3t
Remarque 2. Par la suite nous utiliserons exclusivement la notionde vitesse virtuelle. De nombreux ouvrages utilisent la notion de dépla-cement virtuel.
E. Vitesses virtuelles compatibles avec les liaisons telles qu'ellesexistent à 1'instant t
Les liaisons holonomes peuvent se mettre sous la forme
|aq!*...+faq,,...+|a,.*ffi - o i - , ...helles ont la même forme que les liaisons non holonomes
ajiq} •+...+ .a-jiqj + ... + ajnq^ - bj = 0 j « 1 ... 1
on appelle vitesses virtuelles compatibles les vitesses virtuelles vérifiantles équations précédantes en faisant
1ÊJ. = 0 b; = 0 soito t •*•
Hi<n**---*lit<'i' + --*lfi''°* • ° j". ••"ajiql* + ... + ajiql* + • • • + *jn.'«A* = ° J = 1, • • 1
Remarque Si les liaisons sont indépendantes du temps on parlesimplement de liaisons virtuelles compatibles avec les liaisons
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 467 -
F. Exemples
1. Exemple 1
Un point matériel P peut_^se déplacersur une droite (D) (Oi, Xi) tel^eque GI 6 (D) se déplace sur (0,Yo)de manière que _^ _^
OOi = 1 Yt2 . Yo
On demande de déterminer la vitessevirtuelle compatible avec la liaisontelle qufelle existe à l'instant t
Posons O P = x . X0 + y . Y0
L'équation de liaison s'écrit
y - j yt2 + tg 6 . x
qui se met sous la forme habituelley - tg 6 . x - j yt2 = 0 ou f(x,y,t) = 0
Les vitesses réelles vérifient y' - tg 0 x' - yt = 0
Les vitesses virtuelles x'* et y'* compatibles sont définies par
y'* - tg 0 x'* « 0
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
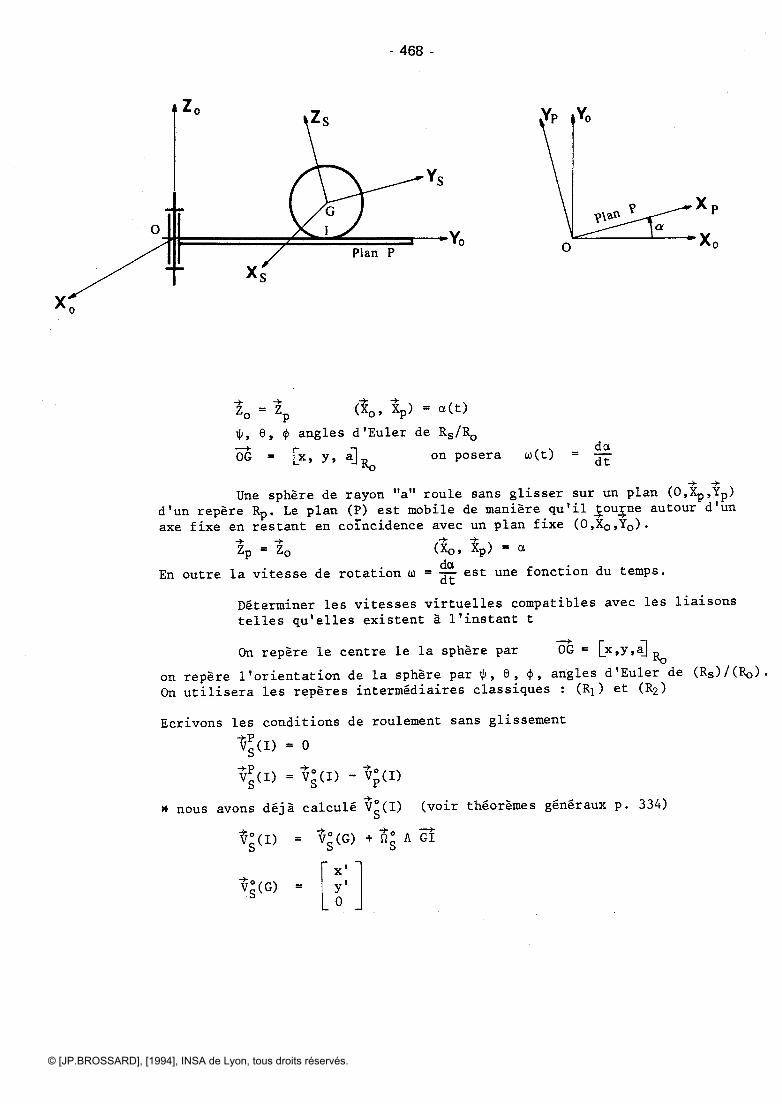
X- Zp (Î0, lp) - a(t)
ip, 0, 4 angles d'Euler de RS/R0—>• r -i / N daOG = [x, y, aj on posera u)(t) = -
-> ->Une sphère de rayon "a" roule sans glisser sur un plan (0,Xp,Yp)
d'un repère Rp. Le plan (P) est mobile de manière qu?il J:ou£ne autour d'un
axe fixe en restant en coïncidence avec un plan fixe (0,X0,Y0).
Zp = Z0 (Xo> Xp) = a
En outre la vitesse de rotation a) = ~ est une fonction du temps.
Déterminer les vitesses virtuelles compatibles avec les liaisonstelles qu'elles existent à l'instant t
On repère le centre le la sphère par OG = [x,y,a|
on repère l'orientation de la sphère par * , '6 , 4>, angles d'Euler de (Rs)/(Ro)On utilisera les repères intermédiaires classiques : (RI) et (R2>
Ecrivons les conditions de roulement sans glissement
Vgd) - 0
Vg(I) - VjCI) - v;(I)
)fr nous avons déjà calculé V (I) (voir théorèmes généraux p. 334)o
(1) = V (G) + ÎJ A GÎ
Fx'~V°(G) = y'
L°
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 469 -
costy sin^ 0 x f x f co.sip + y f sini^V°(G) = -sin^ cosij; 0 y f = -xf sinip + yVcosip
S 0 0 1 0 0 Lt~ L~ «_ KI
iï° = Q2 + &| + ftf = < j ) f z2 + e ' -Xi + iK Zis s
r e f i _^ f o^fi° * !pr sin0 GI - 0
S é f cosô + i^ f -aRI Rl
D'où finalement
_^ x' cosi^ + y' sini|> + aif»' sinôV°(I) = -x' sinif» + y' cosij> + a& '8 L o j
-JR!
^°(D = ^°(o) + ïï* A ôî. = n° A ôîp p p pr° i r °
Q° = 0 = 0" L « ' J R o L»( t>J R o
X
01 = OG + GÎ - y
L ° J R o->o 0 x -ojyV
0(D = 0 A y <ox
L^J L°J L ° JRL L. J L. J RQ
^o cosip sini|; 0 -coy -coy cosip + cax sini|;~p('!)'. - -sinip cosif; 0 œx = coy sini^ + cox cosif/
0 0 1 0 0L J L _| L JRl
^D x1 eosi/; + y f sini/; + ac(>f sinô + coy cosip - eux sin^VP(I) = -x! sin^ + y f cosip + a0 f - o)y sin^ - cox cosip
S 0u -%•ce vecteur doit être nul :
x f cosi^ + y1 sini/; + a<j) f sinô = - coy cosip H- œx sin^ )-x1 sinip + y1 cosi^ + a6 f = wy sini^ + cax cosifr /
ce sont les équations de liaison
avec GO — o)(t) par exemple co = k . t
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 470 -
Les vitesses virtuelles compatibles avec les liaisons telles qu'ellesexistent à l'instant t sont définies par
x1* cosijj + y1* sinip + a<f>'* sin6 = 0 )
-sinifrx1* + cosij; y1* + a-01* = 0 )
G. Intérêt des transformations virtuelles compatibles avec les liaisonstelles qu'elles existent à 1'instant t
On montrera d'une manière générale la propriété très importante(du point de vue de la puissance virtuelle) des transformations virtuellescompatibles avec les liaisons telles qu'elles existent à l'instant t. Enattendant, étudions l'exemple suivant. Reprenons le dispositif de l'exemple1 et supposons qu'il n'y ait pas de frottement au contact. On demande decalculer la puissance virtuelle développée par l'action de la glissière surla masse mobile.
L'action de contact est normale aux surfaces en contact. Donc
Q - QYi
soit Q » £-Q sin0, Q cose, o]]
La vitesse virtuelle est *(P) = F*'*, yf*»0~L^ROLa puissance virtuelle développée par Q associé au champ V*(P) est
/ Z)y* = -Q sin0 x'* + Q cose y'*
Dans une transformation virtuelle compatible avec les liaisons tellesqu'elles existent à l'instant t on a :
y'* - tge x'* = 0
La puissance virtuelle développée par Q dans une transformation virtuellecompatible avec les liaisons telles qu'elles existent à l'instant t estdonc 2)
J * = - Q sine x'* + Q cose tge x'*
6(>* - ot-X
La puissance virtuelle est nulle
Remarque : Dans un déplacement réel la puissance réelle est :
y = 3 , ^g(P)
Vg(P) = [x', y ' , 0]
= [x1, yt + tge x1 , O^LR8
^5 [~ -Q sine "I f x 'J/ = Q cose . yt + tge.x'
o J L°&J = Q cose . t*^/
La puissance réelle n'est pas nulle
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 471 -7.1.4 PUISSANCE VIRTUELLE DEVELOPPEE PAR LES ACTIONS MECANIQUES
A. Forme générale de la puissance
Soit un système de forces appliquées à un système quelconque,dF désigne 1'une de ces forces appliquée en P
dF = QdX, dY, dzj ÔP = Qx,y,z]
Supposons la configuration du système exprimée à lfaide de n paramètres,
qi • • • qi • • • qnx = x(qi . .. q£ ... qn , t)
y > y(qi • •• qi ••• qn •••» *•)z = z(qi . . . q£ . .. qn . ..,. t)
La puissance virtuelle développée par la force dF est dP* = dF . V*(P)
V*(P) = [x1*, y'*, zf*3
.*•* • lfr< + -+ l^^---+ l fc<*" - %z-*r+-*%z*\* + ---+%£*zz<* = 3z_q;*+ ... + 3 z _ q ' f + ... + 3z q'»
3qi aq£ ' 9q7 "
dp* = rdx|f- + dY|5- + dz|î-lq;*+ ... +rdx|^+ d Y |y_ + dz|£_]qI*L 3qi 9qi 9qi J i L 3£ii 3qi 3qi J i* ... * f .dx| i-+4Y|^-+ dz|2-l ql*L 3<in 3qn 3qnJ n
La puissance virtuelle développée par toutes les forces du système est donc
<$>* = q.« f [dx^^Y^.^!^-]*s a J L 9qi 3qi 3qi J
pes
'!" I fëdxt^dï*!fHP€S
.qi« ( D|2L.dx + |y-dY + £-dzTn J L 9qn
3{ln 3(ln Jpes
Qi - f !f-dx + |2-dY + !^dzJ 9q£ 9qi 9qipes
^¥ - Ql q|* + • . . + Qi qi* + . .. + Qn qA^
Cette formule est très importante du point de vue de la théoriecar elle permet de donner une forme unique à l'expression de la puissancevirtuelle. Cependant pour les calculs pratiques on aura souvent à envisagerdes cas remarquables. Nous allons maintenant apprendre à calculer systémati-quement les Q^ dans les cas plus fréquents.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 472 -
B. Calcul de la puissance virtuelle dans quelques cas remarquables
!.. Puissance virtuelle développée par les actions mécaniques appli-quées à un solide dans une transformation virtuelle compatibleavec les liaisons telles quelles existent à l'instant t.
En chaque point P une force dF. Letorseur des actions appliquées au solideest défini par ses éléments de réductionen Os (Os € Rs)
[F] : ji(os)
€Pm f +„ -+J7 * = V*(P).dF
pesUne transformation virtuelle compatibleavec les liaisons est une transformationqui respecte les liaisons ; en l'occurencequi respecte ici le caractère solide par-
fait, c'est à dire l'invariabilité des distances de deux points matérielsquelconques
V'p-2 - i2Firj L
>- <S P-pî"P-P'« T 3 = 0i rj*Sr
P pJ.p'CPj) - V*(Pi)] - 0 '
PiPj.V*(Pj) - PlPj.V*(Pi) - 0
Pour une transformation virtuelle compatible le champ de vitesse virtuelleest un champ équiprojectif. C'est donc un champ de moment
V*(P) = V*(0S) -H Q* A ô£
Par suite, comme pour la puissance réelle, on a
^ = F . V*(0S) + M(08) . fim
La puissance virtuelle est le comoment des deux torseurs.
Exernp leOn applique à la manivelle (1) un systèmed'actions mécaniques dont le torseur iest défini par
T Ui - oL/1J 1 -V ->
^ ( Mi(0) = C z0
on applique à la coulisse (2) un systèmed'actions mécaniques dont le torseur 2est défini par
\6T( j F2 = F X0« ÎM2(A) = 0
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

• 473 -
Calculer la puissance virtuelle développée par les actions méca-niques dans une transformation virtuelle compatible avec les liaisons tellesqu'elles existent à 1Tinstant t.
* La puissance virtuelle développée dans une transformation quelconqueest : $« @* + *niS =o/ ! +<-/ 2
Le torseur des vitesses virtuelles est pour le solide (1)
j«ï - e"M fi - ce-| $*(0) = 0 )
Le torseur des vitesses virtuelles pour le solide (2) est :
i«f - o / ffL „ ,*•J 2 \—y% = F xltr
|V*(A) = x'*X0f
* Vitesses virtuelles compatibles
L'équation de liaison s'écrit x - r = 0cos a
les vitesses virtuelles compatibles sont f^ sin(6-a) 8»* - ndéfinies par : cos a
+ Puissance virtuelle dans une transformation virtuelle compatible
6PJ7» - C 6'« + F X'*
^ = [ ç - F r sin <9-a)]e'*^ L cos a J
2. Puissance virtuelle développée par les forces de cohésion d'unsolide parfait dans une transformation virtuelle compatible :
On sait que le torseur des forces de cohésion est un torseurnul. Dans une transformation virtuelle compatible, c'est à dire respectantl'état solide (distances invariables), le champ de vitesse virtuelle estun champ de moment. La puissance virtuelle est égale au comoment des deuxtorseurs. Comme l'un est nul, la puissance virtuelle est nulle.
Dans une transformation virtuelle compatible (c'est à direrespectant l'état solide), la puissance virtuelle développée par le torseurdes forces de cohésion est nulle.
Remarque Lorsque l'on a affaire à un système quelconque (fluide,système déformable ...) on peut parfaitement prendre comme transformationvirtuelle une transformation qui respecte les positions relatives des diffé-rents points du système. On dit que l'on prend un champ solidifiant. Dansces conditions la puissance virtuelle développée par les forces de cohésionest nulle. Par contre, si l'on veut faire apparaître ces actions mécaniques,il ne faudra pas prendre un champ solidifiant.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 474 -
3. Puissance virtuelle développée par les forces de liaisonsintérieures entre solides, dans une transformation virtuellecompatible
012
J^)M12(I)
|*21
J?21 |M21(I)
Le torseur des forces intérieures étant nul on a :
FI 2 + F2i - 0
S12(D + S21(i) = oôfi~/12 s ^12 ^f* + M1 2(I).nf* (l'emploi de Rg n f es t nullement
/ZA ^ nécessaire)y\L = *2lVf + M2 1(D%"
<$* = Î12 . tl) + «12 V SJ"
Dans de nombreux cas M}2(ï) = 0
jf* - î12 . * CDSi on respecte la liaison telle qu'elle existe à l'instant t, la
vitesse de glissement est située dans le plan tangent et la puissance vir**tuelle est nulle dans deux cas :
- Fi2 normal aux surfaces en contact (ce qui correspond à l'absencede frottement
- V *(I) = 0 la transformation est un roulement sans glissement
4, Puissance virtuelle développée par les actions de liaisonextérieures appliquées à un solide dans une transformationvirtuelle compatible.
R est un solide mobile n'appartenant pasau système et dont le mouvement est connuen fonction du temps
Le torseur des actions de RQ/RÔ est définipar
| ?RO/S< o/s<1)
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 475 -
&* - Vs * %*(I) +S°/s(I)-^*.&* - VsLvrrvr] * *>/.<» •&"**«
Si l'on fait subir à (S) une transformation virtuelle compatibleavec les liaisons telles quelles existent à l'instant t, le solide <SO)doit, rester fixe dans cette transformation.
$8* = 0 $$*(.!> - 0
$* - î0/. • *? + WD-as"en général Mo/ s(D " 0
^* = I , ^°*^ ro/s ' vs
Dans la transformation virtuelle compatible, la vitesse de glissement estcontenue dans le plan tangent. La puissance virtuelle sera nulle dans deuxcas
- FQ/C normal aux surfaces en contact (absence de frottement)
— V|*(I) = 0 roulement sans glissement
5. Liaisons parfaites au sens de Gauss
Une liaison est dite parfaite au sens de Gauss si la puissancevirtuelle développée par les actions de liaison est nulle dans toute trans-formation virtuelle compatible avec les liaisons telles qu'elles existent àl'instant t.
On généralise ainsi le résultat que l'on obtient avec les liai-sons usuelles. _.
/0Nous venons d'apprendre à calculer/* donc les Qi dans toutes
les circonstances usuelles. Nous allons voir que dans certains cas ce calculpeut se faire avec une formulation analytique systématique.
C. Cas où la puissance virtuelle peut être calculée à partir decertai nés fonctions
1* II y a fonction de force généralisée
La puissance virtuelle est y* = Q qff + 000 + Q * + 000 + Qnq^*
S'il existe une fonction U = U (qj ... q^ ... qn, t) telle que
0. - au4l 3qi
on dit qu'il y a fonction de force généralisée. On a alors :
&• . |JL ql« + 000 + |f ql- + 000 + |f qA*9qi 3qi *- 9qn6f>* ou^ = 67
C'est le cas en particulier où il y a fonction de force au sens ordinaire.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 476 -
Soit une force F » [x,y,z] telle que
Y - M v = i£ 7 - MX ~ 3x 3y ~ 9z
q. = |2L_X + IZ-T + |£-zXl 9qi 9qi 3qi
3U 3x + 3U 3y + 3U 3zi ~ 3x 3q£ 3y 3q£ 9z 3q£
Q. . LQl 3q£
Cependant la réciproque nfest pas vraie. Il peut y avoir fonctionde force généralisée sans qu'il y ait fonction de force au sens ordinaire,
Exemple de fonction de force généralisée
Considérons le double pendule ci-contreet supposons que les barres sont de massenégligeable et qu'en G on a un solide demasse m
On sait que la fonction de force estU = - mg.z(G) + cte (la verticale estsupposée descendante)
ZQ = 11 cosÔ + 12 coscf)
U = m gli cos0 + m gl2 cos<f> + cte9UQe = 3? = "m gl1 sin e
3U% = 3? = ~ m gl2 Sln *
Nous ne nous étendrons pas davantage sur ces fonctions de force car ellesont été longuement étudiées à l'occasion des théorèmes généraux,
2. Fonction de dissipation ou fonction de Rayleigh
S'il s'agit d'une force finie î = [x, Y, z] R
Qi - *%-%-%
Supposons que la force î soit telle que F = [jkjx1, ~k2y', ~k3z'Jon peut alors écrire
X • -Mr Y - -fr 2 - 'If-
t = i [kj X'2 * k2 y'2 + k3 i-Z]
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 477 -
Les coefficients Q£ peuvent s'écrire
3<j) 3x _ 3<fr 3y 3<j) 82Qi 3x' 3q£ " 3y f 3q£ " 3z' Sqi
3x 3xf 3y 3y f 3z 3z f
on a en outre 3qT = ^T J^T = ^T JfT -
en effet fa(P> - |L qf + 000 + |L q. > 000 * |L qA + f
Qy ^p^toû JL. = -— ce qui donne le résultat indiqué1 "i en projection
Cette transformation sera ultérieurement utilisée pour faire lestransformations fondamentales de LAGRANGE
r- i . n 9(f) 9x? 9* 9y? 9* 9z?Donc finalement Qi - 3?" ~ 3 3 "" 3P" 3
Q. = •-Jiyi 3l|
avec $ = $ (q] ... q^ ... q^)
C'est une forme quadratique en q{, qj, dont nous pouvons préciser l'expres-sion
* - £ [ki x'2 + k2y'2 +k3 z'2]
X' = — q IX 3q£ qi
y' = -z%— q| en utilisant la convention de l'indice^qi muet
' OZ iz " 3qïqi
* - T i".| %*j+ ** %% J * k= Hr%§ est donc de la forme .
« = î b i j q i q j
Exemple 1 : liaison extérieure et mouvement de translation avec frottementvisqueux
Fo/s = - b Vg (force visqueuse)
(II n'est pas utile de préciser la vitessede quel point il s'agit, car dans un mou-vement de translation tous les points ontmême vitesse)
La puissance virtuelle est«j/ = - b V|.Vg*
y* = - b x' x'*Qx = - b x'
A- + b x '3x
$ = j b x'2 + C
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

Par hypothèse l1action de 1 sur 2 est F12 = " b ¥2
(mouvement de translation : tous les points ont même vitesse)
La puissance virtuelle développée par les actions mécaniques aucontact est dans une transformation virtuelle compatible
^ - î12 V2«y* = - b *i.IP%* = °* - %*
jg* = (Xi* - Xi») XQ
< CJ* - - b (xi - xi)(xi* - x )
0mJ - + b (x£ - xf)xj* - b(x^ - xj)x£*
* - QX1 *i* + QX2
xà*Q = + b(x - x{)Xl
QX2 = - b(xi - xi)
S'il existe $ = $(x{ - x2) on doit avoir
HT = - b<** - x^> IXT - b(x^ - *»Intégrons la première relation
*(x{f xi) = + | (xi - xi)2 -h C2(xi)
C2 ne dépend que de x2
Dérivons par rapport à x£ l'expression trouvée :
9<j> . . . f, 3CoaJr - b (xi - xi) -H -J.
Par identification on a immédiatement —7" = U —* Co = cte9x2 ^
$(xi, xi) - | (xi - xi)2 + C
- 478 -
Exemple 2 : liaison intérieure et mouvement de translation avec frottementvisqueux
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
- 479 -
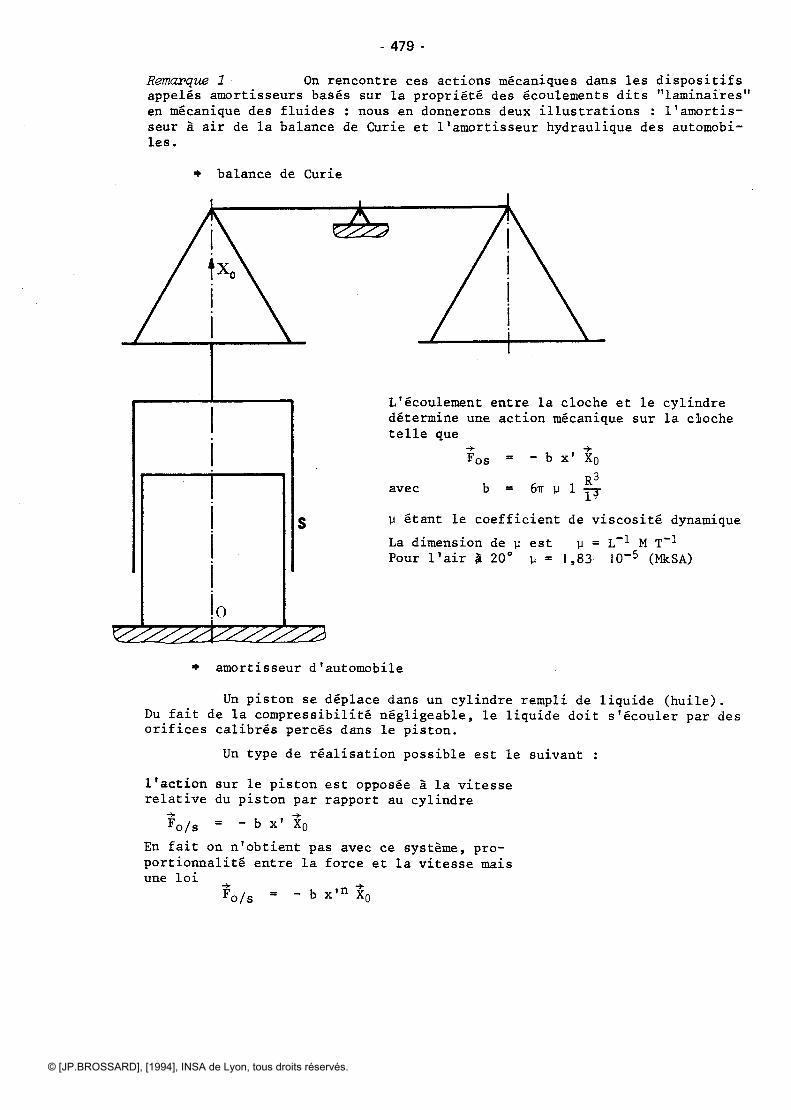
Remarque 1 On rencontre ces actions mécaniques dans les dispositifsappelés amortisseurs basés sur la propriété des écoulements dits "laminaires11
en mécanique des fluides : nous en donnerons deux illustrations : l'amortis-seur à air de la balance de Curie et l'amortisseur hydraulique des automobi-les.
* balance de Curie
L'écoulement entre la cloche et le cylindredétermine une action mécanique sur la clochetelle que
Fos - - b x' X-o
R3avec b = 6ïï y 1 -r-3"
y étant le coefficient de viscosité dynamique
La dimension de y est y = L""1 M T"1
Pour lfair J 20° y = 1,83 10"5 (MkSA)
+ amortisseur d'automobile
Un piston se déplace dans un cylindre rempli de liquide (huile).Du fait de la compressibilité négligeable, le liquide doit s'écouler par desorifices calibrés percés dans le piston.
Un type de réalisation possible est le suivant :
l'action sur le piston est opposée à la vitesserelative du piston par rapport au cylindre
F0/s - - b xf X0
En fait on n'obtient pas avec ce système, pro-portionnalité entre la force et la vitesse maisune loi
F0/s = - b x'n X0
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

$1/2(0) - - b (61 - 61) Z0
cf> = j b (0£ - 6l) + cte
exemple de réalisation
Remarque 3 origine du mot fonction dissipation. Pour un systèmequelconque on peut toujours écrire le théorème de l'énergie cinétique
dT =^dt «-/
étant la puissance développée par toutes les forces extérieures et inté-rieures. Supposons que les forces soient de deux sortes
- la première sorte donnant lieu à une fonction de forceU » U(q1 ... q£ ... qn) (fonction de force au sens strict)
- la deuxième sorte donnant lieu à une fonction de dissipation
Les liaisons étant indépendantes du temps T et <j> sont des formesquadratiques et homogènes
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 481 -
La puissance réelle développée par les forces dérivant d'une fonctionde force est ( du
A dt
La puissance réelle développée par les forces dérivant de la fonctionde dissipation est
<£0- 3+ „} _ H nl 9
nt
%- ' Iqf^ " ••••âqT'i ••' 3^qn
(le champ de vitesse réelle appartient à l'ensemble des vitesses virtuellescompatibles car les liaisons sont indépendantes du temps)
étant une fonction homogène de degré 2, on a, d'après le théo-rème d'Euler
2$ - .^-,1*000 +1 ,1 + 000 +|JrqA
on peut donc écrire
EL = JE!- 2*dt dt z
Ij- (T - U) -- .- 2*
S'il n'y avait pas dissipation on aurait $ = 0 donc T - U = hDe ce fait T - U est appelée énergie totale
-2$ est donc la dérivée par rapport au temps de l'énergie totale. Autrementdit, c'est le taux suivant lequel l'énergie se dissipe, (j> est positive ;l'énergie totale est donc toujours décroissante : il y a dissipation del'énergie.
3. Généralisation de la fonction de dissipation. Fonction puis-sance ifr
_^ Le coefficient Q£ de la puissance virtuelle développée par laforce F = [k, Y, z] appliquée en P telle que OP = [x, y, z] est
Qi , X|2L. + y |L. + z|2-1 3qi ^qi 3qi
soit encore, en tenant compte des transformations déjà utilisées
* • '$ * '$ . Z$ .
Le calcul est intéressant si le coefficient Q£ peut s'obtenir par la seuleconnaissance d'une fonction, c'est à dire si l'on peut écrire
3thQ^ = - ~—j. (ie signe moins sera justifié ultérieu-
i rement)
Pour qu'il en soit ainsi on doit avoir
y - - y - - 3* 7 - '3*X ' " 3F" Y " ïf Z " " 3P"
c'est à dire encore
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 482 -
3X m 3Y 3 Y _ 3Z 3Z = 3X3y' "" 3x' 3z' " -3y1 3xf 3z'
a) £2ISê«SÉ2 Iâle ÉllPê f°rce F répondant à_la Question
Soit F telle que *. .F = -j||- £ (x, y, z, v, t)
avec v - |vp| = / x'z + y'z + z'z
F = - V(P) d'où X - x1 -V . • V
Y - y iJ V
z = *<ZV
Ce type d'action mécanique se rencontre très souvent en particulier dansles actions de liaison. Par exemple
- frottement sec ou de Coulomb f = cte = - a0- frottement visqueux f * aj v- résistance aérodynamique f = - a2 v
2
Si les actions sont du type indiqué par la formule générale on a
3X , 3 ,bx 3v371" " X 3 F V ' ly1"
3v = y' = y_l9y /xtz + ytz + ztz
v
ab3X .m x'y' vByf " V 9V , . 9Y x'y' *v
de même —r = —3xf v 3v
,f . 3X 3Ydou "3F-=3F"
Par suite on obtiendra également par permutation circulaire
3Y = 3Z 3Z = 3X3z' 3y' 3x' " 3zf
II existe donc ty telle que |r = - X |r = - Y |-r = - ZdX dy dZ
soit finalement
|^-=-x'i l^-y- l^r--» 1-3x v 3yf v 3z v
dip - - 1 (x1 dx' + y' dy' + z' dz')
- = - j | (x! dx' + y' dy' + z' dz') 4- C
j 3v , . 3v , . 3v , .mals dv = _dx. + F rdy' +-â-rdz '
dv = - (x1 dx' + y' dy' + z' dz ' )
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 483 -
$ - - £ dv + C
b) Ë5ë5ElÊË-EÊSâE3UâklÊË
+ frottement sec f = cte = - ag SLQ > 0
ty » + a0 dv + C
ty = agv + C soit encore
* - a0 (xt2 •«» yf2 + z'2)1/2 + C
on peut remplacera1, y1, z1 par leur expression en fonction des q{
* frottement visqueux f = - ai v ai > 0
^ = * al v v
* - y ar v2 + C2
' -* - lai (xl2 + y'2 + z12)
c'est une forme quadratique. En remplaçant x1, yf, z1 par leur expressionen fonction des qj_
* - i ï 5 bu i!*jc'est la fonction dissipation de Rayleigh
* résistance quadratique
f = - a2 v2 a2 > 0
i}; = a2 v2 dv + C
* - -2^+C
y m |a- (x12 + y12 + z'2)3/2 + C
* généralisation de ce type d'actions mécaniques
f = - vn avec ^ > 0
ijj = + an vn dv
in+1
* = + anï?T+ C
En fait f peut prendre la forme la plus générale d'un polynôme dedegré n en vitesse
f » - (a0 + ai v + a2 v2 + 000 + an v
n)
on aura immédiatement
v2 v3 vn+J* - a0 v + ai y- + a2 y- + 000 + an --—-
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 484 -
c) dissipation d'énergie dans le cas d'une fonction généralisée' yS3T
* " ** —
t(P) - |Lql + 000 + |L qi + 000 + |f- ,i
v = |Vp|
1^1 - [OC)2]1/2 - [lir.lfrqiqj]1'2
an IllP "9P . .1 n+1* = îSr bsi ' ?qj qiqtl "2"* = *(q{)
Nous allons montrer que est une fonction homogène de degré n+1 en vitesse
*<*» • irij ]
- 3t [%-&*$$• *"'La puissance développée par les forces de dissipation est
&- - »I + 00° *& *«»* tfc 'A
comme ip est homogène de degré n+1 en q{
- » (n+1) «
Appliquons le théorème de l1énergie cinétique en supposant qu'il y aitd'une part des actions de dissipation et des actions donnant lieu à fonctionde force
&-§-<•">*~ (T - U) -- - (n+1) *
L'énergie totale est décroissante
7.1.5 PUISSANCE VIRTUELLE DEVELOPPEE PAR LES QUANTITES D'ACCELERATION
La puissance virtuelle développée par les quantités d'accélérationest r
A* = I Jg(P) . V*(P) dm
pes
^<« - Hr«•*•••* Mr^*-*H:»-
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 485 -
A* - q'* f Jg(P) .|L dm f . . . + q'* f Jg(P) jpL dm + . . . + q^f J8(P>|~ dm1 J dq j J dqi « J oqnP€S P6S P6S
on a donc finalement à calculer les coefficients Ai :
A£ -' J8(P) -Tr-dmJ d^iP6S
L'idée fondamentale des équations de Lagrange est de donner un calcul systé-matique des coefficients à partir de l'énergie cinétique.
A. Transformations préliminaires fondamentales
,o, 'EL . É.1 9qi «q{
*»<» - gr'!*-*'Hr«i *•••!!;*on a donc immédiatement
3 3P3q{ = Bqi
2°/ d 3? . "3dt 3qi " 3qi
If HT- ife^-o-^M-oo.^^^mais d'après les propriétés des fonctions de plusieurs variables
ilr = 4(ir«<*°°°*!!r °°*|[<>d_ 1)P s 3Vdt 3qi 3qi
Vérifions ces formules sur un exemple :
B. ExempleLe point P est repéré en coordonnées polaires
OP = r Xi" + z zt
(Xg, Xi ) =^
On a Ô? = of (ip, r, z) ou encore
OP = ÔP (qlf q2, q3)
qi = *•q2 = r
q.s = z
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 486 -
1°/ Calcul de Vg(P)
Calculons d'abord en utilisant les coordonnées généralisées
vg<p> - If*1 +I r t + 1 2 '3? Ml *—— -s Y- ""*i SB r Yi941 341 *
2 = î,3r Xl
3? t3T = Z.l
8(P) = r' Xx + r *' ?j + zf
Faisons un calcul direct
V«(P) = r' Xi + r —^ + zi.^
4 = ^ZiAÎj- ^Y!
Vê(P) = r' Xi + r *' YI + z' Zj
2°/ Montrons que ~- = fv—2 3qi 3qi
3? _ v *T 9P _ t ^ - t^ - r YI ^ - Xi ^ - Zl
9 ' _ r * 3 . _ . * ' . 3t _ *âp- ~ r YI 9P- ' xi 3?- ~ Zl
oo, „ d P "3V3 / Montrons que — =
a) q£ = *
i_H . r» ?, _ r *• ?.dt 3^ r YI r * Xl
3^ i ^XL , i Ht i- * • , i *5- . r. -i + r „,• _L „ r' ?! - r *• XX
1_ lE = ildt 3^ 3i()
b) qi = r
1-2 = #• ? !dt 3r V l
? - *• Y!3r r x
JîL IE - IIdt Br ^ 9r
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 487 -
c) q£ = z
'±.'2 = 0 H = ndt 3z U 3z U
Nous ne nous étendrons pas au delà sur ces formules car elles nous ser-virons seulement d'intermédiaire pour l'établissement des formules deLAGRANGE.
c- Calcul des coefficients A-;
Ai - { Î8<"> - |r <*•pes x
Posons J8(P) = J
18/P> - dgVS(P) - <*VJ (P) - —££ - 4
+g,p, 3P dV "3PJ (P'-3T~ " dît • 9q~ -^-^ - -oqi au dqi . dV 3P d ^ 9P ^ d 3PmaiS dt'3q£
= dt 3qT V'dt 3q7
^gm IL . -dL*ll.-*IL-i 1.IE.1EJ w 3qi dt V'^T v 8qi 2 dtJÇT 3qi
A d 3 1 f ±2 A a l f tr2 jA-î = " T "HTT T v dm " ^TT T Vz dmi dt 3q.[ 2 J 3q{ 2 JP6S P6S
d_ 3T 3Ti = dt ' 3^ 3qi
D- Expression de la puissance virtuelle développée par les quantitésd'accélération
La puissance développée par les quantités d'accélération prenddonc la forme générale
^m - d 8T 3T ni* + nnn + d 3T 9T «i* 4. nnn * d 9T 9T «f*vy = «_ •. - -x qj 4- 000 + -T-- X'-t - X • l l " Cli + 000 + -7— A" 1 v - -s qi;^-/ dt 3qi 3cn HI dt 3q{ 3qi M^ dt aq^ aqn nn
Les coefficients A£ jouent le même rôle cjue les coefficients Q^. Ils se cal-culent autornâtiquement à partir de l'énergie cinétique.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 489 -
E. Exemple : calcul des coefficients A^ dans le cas de la balancegyrostat1que de K^ivin
!.. Enoncé
Un .système est constitué de six solides (89), (Si), (82), (83),(Si+) , (85) disposés comme ^indique la figure I. (SQ) est un solide formantle bâti de 1Tappareil* (Si), (82), (83), (85) sont des barres qui sont liéesde manière à demeurer toujours dans j n même plan. (814) est un volant. A (So)on lie le repère (R0) : [p, IÊQ» ^0» ZQ] • Le mouvement de (Si)/(So) est unmouvemenj de^rotation autour de (0, Q). A (Si) on lie le repère (Ri) :jo, Xi, Y!, zi] .
-> -+Zi =* Z0AI arbitraireti = ti A ti ^ ^On repère la rotation de (Ri)/(Ro) par ^ » (Xo, Xi)
(82) est une barre OB de longueur 2a. Le mouvement (82) 81) est un mouvementde rotation autour de (B, YI). A (82) on lie (R2) : [B, X2, 2, 1£| .
-»• ->Y2 = 14.
!2 " F ,X2 = Y2 A Z2 ^ ^On repère la rotation de (R2)/(Ri) par 0 = (Zi, Z2)
(83) est une barre homogène BA de longueur 2a. Le mouvement de (S3>/(S2) estune rotation autour de l'axe (B, t2). D'autre part l'extrémité A de BA estassujettie à se déplacer autour de (0, "Z"Q) étant reliée en ce point à labarre (85) qui a un mouvement de translation par rapport à (Ri). A (85) onpeut donc lier le repère (R{) : [A, IL ti, 5J_; Le mouvement de (83) parrapport à (85) est une rotation autour de (A, YI). A (S«) on lie le repère[A, x3, Y3, z3"].
Y3 - !
** - IZ = X 3 A Y 3
On repère la rotation de (R3)/(Ri!) par 81 = (Zi, Z3)
On a immédiatement 61 =(-r - 0). On éliminera 61 en fonction de 0 chaque foisqu'il se présentera dans les calculs.
Le solide (8 ) est un volant en mouvement de rotation autour de la barre AB.A (81+) on lie le repère (R ) : [pf 1 , 1 , ÎJ .
^ milieu de AB
f = lT4 ^ .4 arbitraireZ4 - XAt ^On repère la rotation de (Rit)/(R3) par <(> = (Y3, Y4)
La masse de (8 ) est Mtt et son tenseur d'inertie YG est
= A^ 0 0~Ir = 0 B4 0
L 0 0 Bj
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 491 -
AG - a X3
-ij/f cose a 0Q3 A AG » -4f A 0 = a ^ f sine
L *' sineJR3 LoJR3 L * e ' JR3
[~4a sin6 cos0 61
V°(G) = a ij;1 sineaef - 4a sin2e ef
nR3
* &£ = + 3
til = (f>f $3
Fcj)' - i/;1 coseQ^ -. -ef
$' sine „*- K3
T° - IM^ 16 a2 sin2e cos2e ef2 + a2 ff2.sin26 + a2 ef2(l - 4 sin2e)2lsr. «t —-^
+ -i A^ ( • < ! > ' - ^' cose)2 + B^ 6'2 + Bu t{il2 sin26
tlyr' " + -M»1 - *' sine)cos6 6' + A^ sin6(<f)" -if; "sin6 - i^'e'cose)dt d* + B^ ip" sin6 + 64 *' 9' cos 6
il - 0•3*A = A ' - *' sin6)cose 6' + Aif(4>" - T|»" sine - '6' cose)sin6* + B^ t|)" sin6 + B^i^'e1 cose
v d 3T 3Ta; dt 9^)' ~ 9<(, ~ ^
H . o3<j)
Î^TIjr - A4 ( < J > f - *f sine)
A^ = A± ((f) f f - ^ f l sine - i|>' e f cos 6)
7.1.6 FORME GENERALE DES EQUATIONS DE LAGRANGE
Le théorème de d'ALEMBERT s'écrit pour une transformation virtuellequelconque
Qiqi* + 000 + Qiq[* + 000 + Qnqn* * A,qi* + 000 + A£qJ* + 000 + q *
[Q! - A]]qf* + 000 •+ [Qi - Ajql* + 000 + [Qn - Aj qn* = 0
Les -q|* étant arbitraires, nous avons alors A£ = Qi V i = 1, ,.. n
.c'est à dire la série d'équations
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 492 -
d_ 3T 3T =
dt BqJ" 3qi ^
d 3T 3T
dt 3qT ~ B?T " Qi
d_ 3T 3Tdt SqA " 8qn n
II faut faire très attention : les Qi sont les coefficients de la puissancevirtuelle de toutes les actions mécaniques » II y aura donc intérêt à choisirconvenablement la transformation virtuelle pour avoir une expression pour Qiaussi simple que possible. En particulier nous savons que dans une transfor-mation virtuelle compatible les liaisons développent une puissance virtuellenulle si elles sont parfaites. De même les forces de cohésion développent unepuissance nulle dans toute transformation solidifiante. Le problème desliaisons étant fondamental, nous allons étudier séparément les systèmes àparamètres indépendants et les systèmes dont les paramètres vérifient deséquations de liaison pour tenir compte des propriétés remarquables des trans-formations virtuelles compatibles.
7.1.7 EQUATIONS DE LAGRANGE POUR UN SYSTEME A PARAMETRES INDEPENDANTS
Cela signifie que lorsque l'on prend des q|* arbitraires lesliaisons telles qu'elles existent à lfinstant t sont respectées. Envisageonsmaintenant les cas remarquables à partir de la constatation déjà évoquée pourla mise en place des théorèmes généraux : le coefficient QÎ peut avoir quatreorigines
Qi ' QiD + QiC + QiLe + QiLi
Q^ force généralisée provenant des actions mécaniques donnéesQiC force généralisée provenant des forces de cohésionQiLe f°rce généralisée provenant des forces de liaisons extérieuresQiLi f°rce généralisée provenant des forces de liaisons intérieures
A. Cas où l'on a affaire à un système de solides parfaits : liaisonsparfaites au sens de 6AUSS
L'analyse précédente donne
Qîç = 0 solides parfaits : la puissance virtuelle est nulle dans unetransformation qui respecte l'état solide
Qite = 0 (liaisons extérieures parfaites et transformations compatible)
QiLi = 0 (liaisons intérieures parfaites et transformation compatible)
En pratique l'hypothèse revient à dire que l'on a affaire à unsystème de solides parfaits soumis à des liaisons sans frottement. On aalors :
Qi = QiD
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 495 -
L'élément (85) est identique à (82).Enfin un moteur, non représenté sur la figure, applique à l'élé-
ment (Si) une action mécanique dont le torseur en 0 est
( 0M : L ,
( M = MZ0
1. Calcul de l1énergie cinétique
T° = 2 Tf
T| = I$| .. To . 2
iï% » --82 + Œ! - <f> ! Y2 + '*f Zi
F-^1 sin f^ = +••
_^f cos 4> JR
T° - j 2[A t2 sin2 <f> + A l2 + C î2 cos2 cf) ]
2. Calcul de la puissance virtuelle développée par les forcesdonnées
Puissance virtuelle développée par les poids
^ = 2 .I2 . G2)
r - i <o ' * iV°*(G2) = 1 sin<f> ^*
L° JR2
P = + m g ZQ
^ F- sin <|>P = + m g 0
LCOS cD JR2
^ = - 2 m g 1 sin ((> V*
Puissance virtuelle développée par le couple appliqué
ffa = S(0) .«•" = M ^ ' *
^X * = - 2 m g 1 sin $ < f> '* * M i p f *
Q^ = - 2 m g 1 sin <(>,
Q. = M
^
Remarque : La puissance virtuelle développée par les actions de liaisonest nulle car les liaisons sont parfaites et nécessairement compatibles.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 496 -
3. Equations de LAGRANGE
a)«JZ?U)
d 3T _ _ 0
dt 3<î>' ~ 3<j> ~ ^<f>
If • 2 A * '
'*&• ***•r\ m
—- = A ij;'2 sincj) cos<() - 2 C if;'2 sin(j> cos<j>ocp
A l! - A i/;'2 sin<f> coscj) + C if;'2 sin<(> coscf) = - m g 1 sin<f>
b) j^W
IYT- = 2 A ij;' sin2 <j> + 2 C i/j' eos2 <{.olp
j rvrp
-rr T7T = 2 (A sin2 (() + C cos2 <|))^ff + 4 (A - C) ty* $f sin(() coscf)du otp
2(A sin2(j) + C cos2<f>) ij;ff + 4 (A - C) V < j > f sin(j) cos<() « M
B. Cas particulier où la transformation est une transformation vir-tuelle compatible avec les liaisons telles qu'elles existent àl'instant t. les liaisons étant parfaites au sens de Gauss, et oùil y a en outre fonction de force généralisée pour les forces don-nées :
Qic = °QiLe - °QiLi - 0o. - 8UQiD - 3qi
Les équations de LAGRANGE peuvent donc s'écrire sous la formeremarquable suivante :
£L 8T - T = ^
u
dt 8qf 3qi " .Bqj
d_ 3T _ 3T _ 3Udt 9q{ " 3qi " Bq.^
d_ 3T 9T _ 3Udt 3q^ " Bqn " 3qn
Posons alors L = T + U et remarquons que puisque U est unefonction ne faisant intervenir que les paramètres et le temps j*u, = 0. D'où
'àq{
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 497 -
d_ 3L _ 3L _ 0 •dt Iq]" ' 3qj
1_ IL. -' ii_ - 0dt 3q[ 3qi
d 9L 3L _ 0dt 9q; 9qn
d 3L _ 3L _ Q
dt aq'j aqj
d_ j|L 3L = 0
dt 3q{ 3q£
d_ 3L 3L _ Qdt 3q 3qn
Les équations peuvent être écrites à partir de la seule fonctionL appelée Lagrangien du système ou encore fonction génératrice. Nous montre-rons par la suite la condition générale pour qu'il y ait fonction gêné ra tri ce.
Exemple 1 : Pendule d*Euler
ÔGq = X XQ
(x0, Xi) = e
Lorsque Gj est en 0 le ressort estsans contrainte.
On suppose les liaisons sans frotte-ment (prismatique et rotoïde).
Les équations de LAGRANGE s'écriventdonc
<L 3T_ il. i£ -dt aF" " 3x ~ 3x
d 3T T _ = 0
dt 3-6'1 '" 36 "30
1. Calcul de T° '
T° = TI + T|
T? = i M x ' 2
T2 • ' - • y» (^ > 2
ï° = ^°(G!) +%° A ;G^2
^°(G2) = x1 x0 + e f yx A 1 \
= x f x 0 + i e f K!
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 498 -
^ f x f + 1 e1 cos 6 ~V°(G2) = - l e ' sin 6
L° JKO(V°2)2 = x'2 + l2
0 ' 2 + 21 x' 0 ' cos 0
T° - U (M + m) x î 2 + ml2 0 f 2 + 2 ml x' 0 f cos 01
2- £§i£Hl-ËÊ«5
U = \Ji + U2 ( Ui fonction de force de pesanteur* ÏÏ2 fonction de force due au ressort
k x2U = m g 1 cos 0 - —~— + C
3. Equation de LAGRANGE en x
3T•rrr = (M + m) x1 + m 1 01 cos eox
J r\rp
dt "âP" = (M + m) x" + m i e " - m l 6 '2 sin 6
f - - " - f - »
(M + m) x f f + m 1 0 f f - . m l 0 î 2 sin 0 + k x - 0
4. Eguation^de^LAGRANGE^en^iB
3T oT = m 1 01 -+ m 1 x! cos 0
J rvrp
dit 3p = m l2 eff + m ! x" cos 9 - m 1 xf 0f sin 0
9T— = - m 1 xf 0f sin 0
au , . A•^ = - m g 1 sin 0
m l2 0" + m 1 x" cos 0 + m g 1 sin 0 = 0
1 0lf •+ x" cos 0 + g sin 0 = 0
Remarque 1 : solution par les théorèmes généraux
La question se pose de savoir quelles équations provenant desthéorèmes généraux nous donneront les équations ci-dessus directement. Ilest évident que ce sont des équations qui ne contiennent pas les actionsmécaniques :
- théorème de la somme géométrique appliquée à l'ensemble (1) U (2)et engrenant la projection sur X0 (liaison (S^/CS'o) prismatiqueparfaite)
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 499 -
- théorème du moment^dynamique en (Gi) appliqué à (82) et en prenantla projection sur YQ (liaison (S2)/(Si) rotoïde parfaite)
L'étude par les théorèmes généraux a été faite en détail (exercicechapitre 6).
On constate alors que les équations de LAGRANGE fournissent immé-diatement les équations débarassées des inconnues dynamiques.
Remarque 2 : Le Lagrangien du système est
L ' - 1 (m + M)x2 + ml2 0'2 + 2 ml xf 0' cos 0 + mgl cos0 - ~~ + C
Exemple 2 : Problème de LAGMNGE-POISSON. Mouvement d'une toupie symétriqueautour dfun point fixe.
* le corps (S) est un solide de révo-lution dont la matrice d'inertie est
FA 0 0~[I0]R 0 A 0
S 0 0 cLKs
•* le centre d'inertie est sur l'axe derévolution
ÔG « 1 Zs
* la liaison (SQ)/(S) est une liaisonsphérique parfaite
Les paramètres de configuration sontip, 0, <J> angles d'Euler normaux
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 500 -
II y a fonction de force et les liaisons sont parfaites. Leséquations de LAGRANGE sont donc :
'd_ J9T_ _ 3(T+U) _ 0
dt 3^ f 3i|j
d 3T (T+U) _ Q
d t W . 9e
d 3T _ (T+U) = 0
dt 3ff " 3<J>T° - 1 o° Tn 0°T "" 2" 8 ' I{3 S
^s = ^î + •* ^ï
^s = * '- f .^2 + e ' ^2 + * f Zl
Toi fil [o^° = < ) > f 0 + e f 0 + i ^ f sin6
L^R, LQJR2 LcoseJR2
f0112° - i|;-f sin6S ij;' cosB •*•()) ..
K2Mais comme le corps est de révo-lution autour de Zs = Z2
= F A 0 O""I0 = 0 A 0L° o CJR2
[A o ol Te 'T° = 1 T e » , y sine, i|;f cose + $\\ 0 A 0 i^ f sine2 [o o c] L^ f cose + <j>^
T° = ^ | A ( e f 2 •*- ij;'2 sin2e) -H CCif;1 cose + < j > ' ) 2
U = - m g 1 cose + C
EaïïSÊioa-âê-ï^SSéïïêE^^Liîlji
^L.. = A \(;f sin2e + C(i(; f cose + < ( > ' ) coseolp
4-ITT = 4- (A *' sin26 + C(i|>' cos9 + < ( > ' ) cos6dt oijr dt
n - «H - o9ij; ~ U
i-^r = 0dt 34)'3TW = Cte
A \(;f sin2e + C(i^ ! cose •»• < j ) f ) cose = cte (1)
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 501 -
lanâ£i2s_âs_tè§5èS§E L_§1
H T - A -
fefr ' A 8 "U - A ij>'2 sin0 cosG - C 0|;f cose + <f>f) ij;1 sin6du
— = m g 1 sin6do • _________>_-______»____^^
A e" - A ip'2 sine cose - C 0|;f cose + c))f) i|>' sine - mgl sine - 0
laHâ£î2S«îlê«Lè§5M§S-.ÊS..è|Ir - COM cose + < | > f )
Itlr = ^ C ( V cose + * f )
s - °d<j)
9U n
•sy • °ip1 cose + 4 > f - = cte (3)
Posons ' cose + <j)f = ro . Les équations s'écrivent
A r sin2e + C r0 cose = X C r0
A eff - A i|;f2 sine cose - C TQ ^f sine - mgl sine = 0
if>! cose + <()f = r0
Remarque 1 : On pourra remplacer la deuxième équation par l'intégrale desforces vives T = U + h
Remarque 2 : Si l'on écrit les équations du mouvement à l'aide des théo-Ternes générauxj les équations (1)> (2)j (3) sont respective-ment :
- Théorème du moment dynamique en projection sur ZQ (la projection du momentcinétique sur ZQ est constante)
- Théorème du moment dynamique en projection sur K£
- Théorème du moment dynamique en projection sur Z2
Le théorème du moment dynamique s'écrit
t°(0) = ÔG A P
OG = 1 Z2
P = - m g Z0
r°.ZQ = sin eLCOS ej>~ -1 R2
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
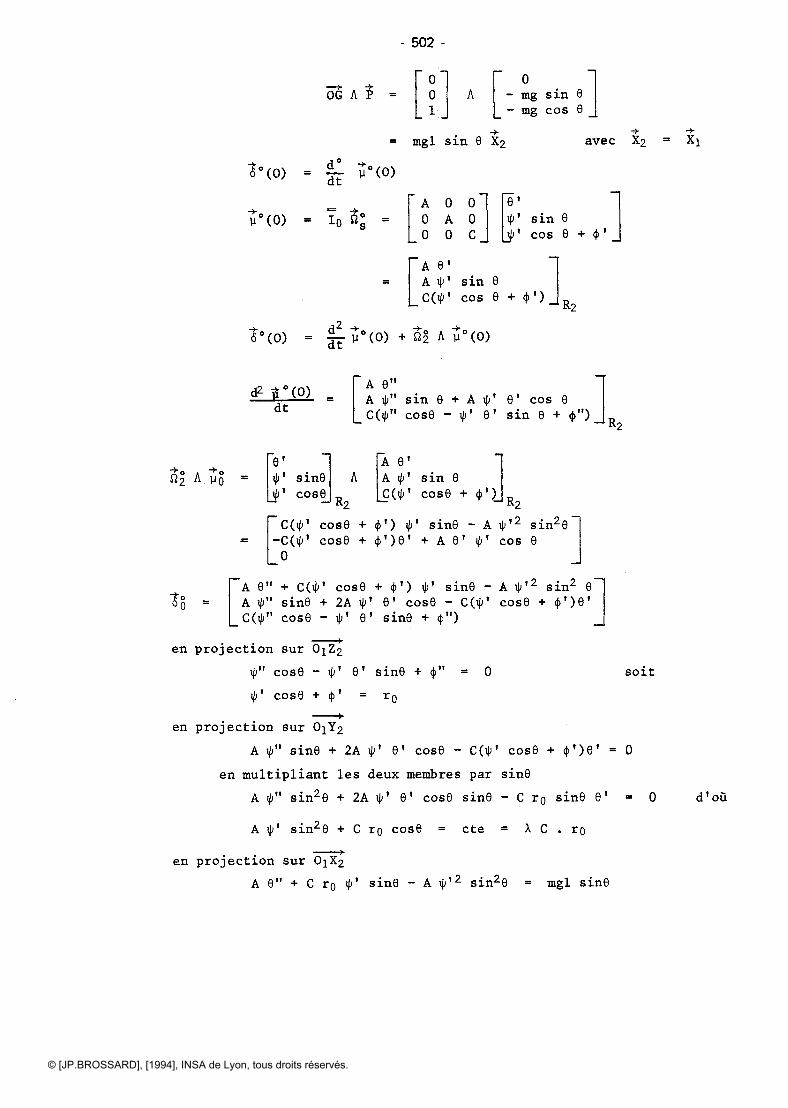
- 502 -
-> H. r°i r °OG A P = 0 A - mg sin 61 - mg cos 0 _
-> -> ->= mgl. sin 0 X2 avec X2 = Xi
S°(0) - ^ ΰ(Q)
F A o ol .fê1
y°(0) - I0 a* = 0 A 0 f sin 0LU 0 C J [jp1 cos 0 + (j)1 _
"A 0'A ^ f sin 0C(iJ;f cos 0 + < f > f ) Li_ -±K2
/^
t°(o) - §£ P°(O) + n§ A p°(o)
r A 0" ~d2 ^°(Q) - A ty" sin 0 + A if;1 0' cos 0
C(ifj" cos0 - i|;f 0 f sin 0 + <(>") K2
F01 n TA 0i^2 A y§ * ^' s^-nô A A ijj f sin 0
i};1 cos0 ., C(i^ f cos0 + < j > ! ) _,1— —J K£ K-2
""CC^1 cos0 + f1) $' sin0 - A i|;f2 sin20"~-C(^ f cos0 + < j > f ) 0 f + A 0 f i |> f cos 0
-°
TA 0 f l + C(ip f cos-0 + < ( ) f ) ^ f siriG - A i ^ f 2 sin2 0~IQ = A ip11 sin0 + 2A i|>! 0 f cos0 - C(^ f cos0 + ( f ) f ) 0 f
LC(\j ; f f cos0 - i(;f 01 sin0 + c)>l!) _
en projection sur QI^Z
ty" cos0 - ty* 0f sln0 + (j>ff = 0 soit
tj;f cos0 + <(>f = r0
en projection sur OiY2
A ty" sine + 2A ij;1 0? cos0 -'C^1 cos0 + c()f)0f = 0
en multipliant les deux membres par sin0
A \j;f! sin20 + 2A f 0f cos0 sin0 - C r0 sin0 01 = 0 d!où
A ij;1 sin20 + C ro cos0 - cte = X C . ro
en projection sur 0^X2
A 0" + C ro if^1 sin0 - A i(jl2 sin20 = mgl sin0
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
- 503 -
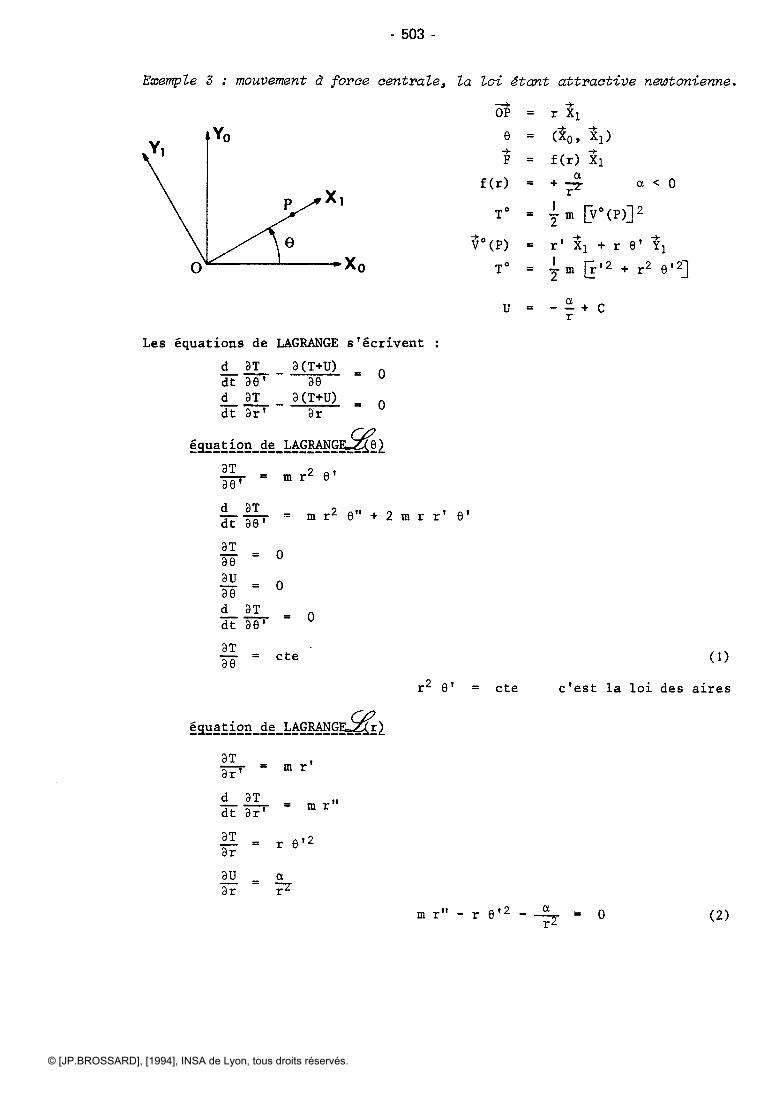
Exemple S : mouvement à force centrale, la loi étant attractive newtonienne.
ÔP = r K!
6 = (X"0, Xi)
F - f(r) Xi
f (r) - + -y a < 0
T° = im[y 0 (P)]2
V°(P) = r1 Xx + r e' \T° - ^.m £1.2 + r2 e.2]
u = - f + c
Les équations de LAGRANGE s'écrivent :
fL 8T 3(T-t-U)dt a e f 3ed 9T 3 (T-fU) _dt Br f " 3r
G?É3ïïâ£i2S-^ë-tè§Mîî5fe?d§i
HT - - '2 ' '
4r||r - m r2 6" -f 2 m r r' 6'dt ou
H - o36 ~ °
M = oae °i-iï- = odt 96'
H = été ' (,)
r2 6' = cte c'est la loi des aires
O?§SHâ£i2ïï_âÊ_iè§l^§Ii^ïïl
3T ,âp- = m r'
î t & - . r -
| I = r e . 2
H = «3r r7
m r" - r 6'2 - -^ = 0 (2)
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 504 -
Remarque 1 : les équations (1) et (2) sont respectivement :->•
- théorème de la somme géométrique en projection sur YI- théorème de la somme géométrique en projection sur Xj
Remarque 2 : le Lagrangien est
L = Im (r'2 + r2 0'2) -f + C
Remarque 3 : on peut remplacer l'équation (2) par l'intégrale des forcesvives et l'on a ainsi deux intégrales premières
Exemple 4 : double pendule
Les liaisons (80)7(8!) et (S2)/(S!)sont dejs liaisons rotoïdes parfaitesd'axes YQ. La masse des barres estnégligeable. En Gj et G2 sont dispo-sées deux masses ponctuelles mi etm2
II y a fonction de force et les liai-sons sont parfaites.
d 3T _ JKT _ _31Jdt 30' 30 " 30
d_ 3T ._ JTT 3Udt 3J1" 3(f) " 3cj)
1. Calcul^de^T^
T° - T ° ( l ) + T°(2)
T° = 1 m (V! )2
1 2 GlTf = 1m if 0 '2
Tl - ~ m 2 [V°(G2)]2
OG2 = (11 s^ne * 1-2 sin<|>)Xo + (li cos0 + 12 cos4>)Z0
V°(G2) = (li 6 f cos0 -H 12 (()' cos(f))X0 - 0 f ( l i sin0 + 12 sin(j))Z0
T2 = j m2 [li 0 '2 + 12 c j > ' 2 + 2 li!2 0 ' c f > ' cos(0-cf))]
T° = 1 (mi + m2)li 0 '2 •+ m2l| c f ) ' 2 + 2 m2lil2 6 f .f1 cos(0 - (j>)
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 505 -
2 • Z2S££Î2S-.ÉÊ-£2££ê
U = mi g li cos0 + m2 g . (Il cosB + 12 coscj>) + C
U = (mi + m2) g li cos0 + m2 g 12 cos.<j> + C
3- 5aHê£Î2SS-.âÊ-tè§5M§?
*>_%)
||r - (mi + m2) if 6 f + m2 li 12 * f cos (0-<j>)J JNITI Q
TT^T " (mi + m 2 ) l ie f l + mi l i l 2 <f> f l cos(6-c()) - m2li!2c()f (0 '-cf)1 )sin(0-<f);UL OC7
3T-^ = - m2 li 12 (6 V) sin (6-<j>)
3îî• au- * - (mi + m2) g li sine
3H(m1+m2)lie" + Iil2 <f>" cos(9-<))) - m2l!l2(j)'2 sin(6-(f.) + gll(mi+ m2)sin6 = 0
b)j2?*)9T ?TT-T « m2 12 <()
f + m2 li 12 01 cos(0-<|>)
H Î T ?r |fr = m2l2())
fl > m2lil20fl cos(0-*) - m2l!l20
f (0 f-c|)T)sin(0-(())U.L OC})
Arp
|i = + m2li!2 0' cf)1 -sin(8-*)
BU . . .•-gj = - m2 g 12 smc>
m2 12 <()f! + m2 Iil2 0" cos(0-<|>) - m2li!2 0
î2 sin(0-<)>) + m2 g 12 sin^J) = 0
Remarque 1. Le Lagrangien du système est
L = j (mj + m2)li 0î2 + m2 12 <))
f2 + 2 m2 Ij 12 0 ' cj>f cos(0-cj))
+ (mi + m2) g li cos0 + m2 g 12 coscj) + C
Remorque 2. Obtention des équations par les théorèmes généraux
Les liaisons (SQ)/(SI) et (Si)/(S2) sont rotoïdes parfaites. Parsuite .Soi(o) .Î0 - oet M12(Gi). Y0 = 0
Les équations du mouvement s'obtiendront donc en appliquant :
- le théorème du moment dynamique en 0 à l'ensemble (Si) U (S2) et enprenant la projection sur Y0
- le théorème du moment dynamique en GI à (S2) seul et en prenant la pro-jection sur YQ
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 506 -
Remarque 3. Les liaisons sont parfaites, les solides parfaits, etil il y a fonction de force au sens strict. On peut donc écrire l'inté-
grale des forces vives T = U + h
j (m! -i- m2) li 6'2 + m2 12 < f > ' 2 + 2 m2 li 12 01 < f > f cos(0-<J>) =
+ (mi + m2) g l j cos0 + m2 g 12 cos<t> + C
C. Cas particulier où la transformation virtuelle est une transformationvirtuelle compatible avec les liaisons telles qu'elles existent à tmais où les liaisons ne sont pas parfaites au sens de GAUSS et don-nent lieu à fonction de dissipation.
Qic - °dd>
QiLe + QiLi " -âfr
Les équations de LAGRANGE s'écrivent donc
d 3T T 3'4> - .
dt^T"^55^^"^ ¥ 1
8US'il y a fonction de force Q£D = —r et les équations de LAGRANGE prennentla forme x
d 3T + 8* (T+U) . n „ •«•'. r\ f ' r\ r. "~ U V J.dt 3-q{ 3q£ Bqi
Et là encore les équations s'obtiennent à partir de fonctions T, U, $
La fonction dissipation permet donc d'introduire très simplement les actionsde liaison dans les équations du mouvement
Exemple
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 507 -
Les liaisons (So)./(-Si), (S0)/(S2) et (Si)/(S2) sont dissipatives et donnentlieu à fonction de dissipation de RAYLEIGH. Lorsque le système est en équi-libre, on a _
xl ~ xleX2 = X2e
on repère par xj et x2 les déplacements par rapport à la position d'équilibre
Xi '- Xle + xi
X2 = X2e + x2
L'introduction de ces nouveaux paramètres permet de simplifier considérable-ment l'écriture des équations.
Les raideurs des ressorts sont kj, k2, k3 et les constantes desamortisseurs bi, b2, b3
Les équations de LAGRANGE s'écrivent
fLil_ + li_ - IL- - IL. - odt Bxi 9xf " 8x1 "" 8x1
d_ 3T + 3jL-.-.3T_ _ BU Q
dt "3xJ 9x2 " 3x2 3x2
1. Calcul_de_T
T = mi x{2 + Y m2 x^2
2. Calcul^de^U
Désignons par li, 12, 13 les longueurs des ressorts (Ri>, (R2)> (R3)et par IIQ> ^20» ^30» ces m^mes longueurs lorsque les ressorts sont sanscontrainte
U = - |kl! - 110)2- | (12 - 120>
2 - J^ <13 - l30>2
* 11 - |ÔA|
lj = Xj car Xi est toujours > 0
11 - Xie •*• xi
* 12 - |BC|BC = ÔC - ÔB . « [X2 - (Xi + Ijj] X0
12 = X2 - Xj - Ij car BC a une valeur algébrique positive sur XQ
12 = X2e •+ x2 - Xle - Xl - li = (x2 - xi) •+ (X2e - Xle) - 1
* 13 = IDE]DE = ÔE - ÔD = '[I, - (X2 + 12)] X013 = L - X2 - 12 car DE a une mesure algébrique positive sur XQ
* L " X2e " X2 - 12
La fonction de force est donc
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 508 -
U = | (X! + Xie - lio)2 - f2- [x2 - X! + (X2e " Xle> - e 1 ~ I2o]2
- |i (L - X2e - X2 - e2 - 130)2 + C
Le dernier terme peut tout aussi bien s'écrire
-jp. (x2 + X2e + e2 + IsO ~ L)2
II s'agit maintenant de montrer comment sont obtenues les positions d'équi-libre. Pour cela appliquons le théorème de la somme géométrique respective-ment à (S}) et (S2) en projection sur X0
FR /g + F . = 01 1 2 / 1 pour la position d'équilibre
FR2/S2 + FR3/S3 °
(nous verrons ultérieurement des méthodes analytiques pour trouver les posi-tions d'équilibre).
Vsi= - k i (l1 - l i o ) iHr• - kl (Xie + xx - 110) X0
•*" CBFR2/Sl = - k2 (l2 - l2°> TCBT= + k2 (x2 ~ xi +. X2e - Xle - ei - I2o) X0
FR2/S2 = " k2 (X2 " Xl * X2e " Xle ~ GI " l2o) X°
(le ressort a une masse supposée négligeable)
\/S2 = - k3 d3 - 130) -fHp
FR3/S2 = + k3 (-x2 + L - X2e - e2 - 130) X0
Par définition du repérage nous avons à l'équilibre x^ = 0 x2 = 0. Enappliquant les formules de projection on aura :
- ki (Xle - 110) + k2 (X2e -:Xle - 6l - 120) = 0
- k2 (X2e - Xle - «! - 120) + k3 (L - X2e - e2 - 130) = 0
Développons la fonction U
U = -|l-x2 - kixi(Xle - 110) - fr1- (Xie - lio)2
- |2. (x2 - xi)2 - k2 (x2 - Xl)(X2e-Xie-ei-li0)
- |2- (X2e - Xle - ei - 120)2
- |3. X2 - k3x2(X2e + e2 + 130 - L) - |i(X2e + e2 + 130 - L)
2 + C
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 509 -
TT kl ? k2 / \2 ka oU - ~ - Xf - -zf- (X2 - Xj)
Z - - - X|
- «i M*ie - 1lo) - (*2e * xle ~ el ~ o) 2
- x2 k3 (X2e + e2 + 130 - L) + k2 (X2e - Xie - ei - IIQ)
- f1 (Xie * ilQ)2 - |?" <X2e - xle ~ el ~ o)2
- |3. (X2e + e2 + 130 - L)2 + C
U = - |I xf - |2 (X2 _ Xi)2 _ |1 (X2>2 + Cl
En repérant les déplacements à partir de la position d'équilibre on a uneexpression très simple de la fonction de force. Il y a intérêt à appliquerce repérage toutes les fois que l'on a des ressorts inclus dans une chaînede solides.
3• ÇâlSHl- ë i
On a immédiatement comme X] = xj
X2 = x2
= +1 bi xf2 + 1 b2 (xi - xi)2 + I b3 x|
2 + C
4. Eguations_de LAGRANGE
^ C/? ^ d 3T „*=^xi) : dT^F = ml Xi
8U^—- » - ki xi .-+ k2 (x2 - xi )
| r - b x xi - b2 W2 - xi)
. m j x" + (b1 +. b2)xi - b2 x^ + (k x •*- k2)xx - k2 x2 = 0
•^&*> : Stfj - ««»3 U— - - k2 (x2 - Xl) - k3 x2
HT - b2 (x^ - x{) + b3 xi
m2xf^ - b2 xj -f (b2 + b3)x£ - k2 KI + (k2 + k3)x2 = 0
On peut écrire ce système différentiel sous forme matricielle
* m! 0 1 fxyl f (ba + b2) - b2 1 Txfl ["(kx + k2) - k2 1 [xj* -H » + * = 0
0 m2 x J •[_ - b2 (b2 + b3)J |_xi [_- k2 (k2 •*• k3)J [x2J
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
- 510 -
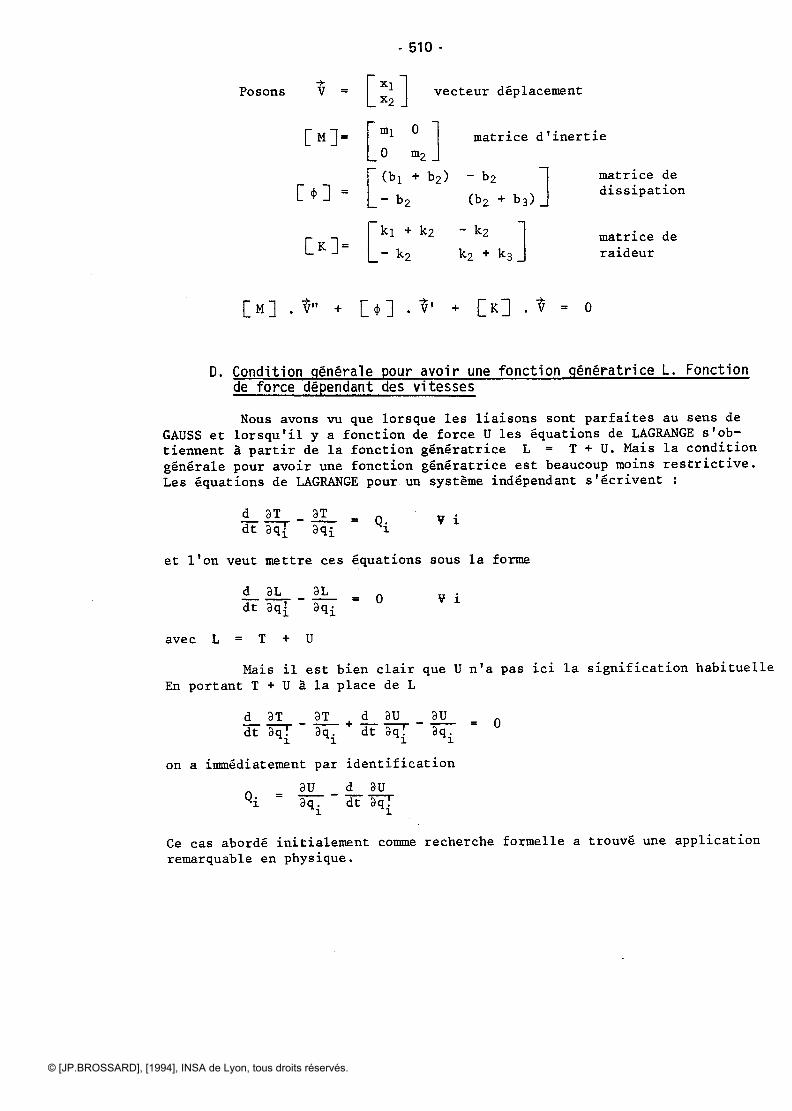
Posons V = 1 vecteur déplacementLX2 J
j ^ M ^ - mi matrice d'inertieL° m2 JF (bi + b2) - b2 matrice de
C * 3 = L-*2 (b2 + b3)J ^sipation
r H- f k l ' + k2 ~ k 2 1 matrice deL K J ~ " _- k2 k2 + k3 _ raideur
[M] . ^" + [4>] • ^' + DKH • ^ = °
D. Condition générale pour avoir une fonction génératrice L. Fonctionde force dépendant des vitesses
Nous avons vu que lorsque les liaisons sont parfaites au sens deGAUSS et lorsqulil y a fonction de force U les équations de LAGRANGE s'ob-tiennent à partir de la fonction génératrice L - T + U. Mais la conditiongénérale pour avoir une fonction génératrice est beaucoup moins restrictive.Les équations de LAGRANGE pour un système indépendant s'écrivent :
1_ 8T 9T = H V idt âq{ aq£ xi
et l'on veut mettre ces équations sous la forme
d 3L 3L, _ .dt'^r" a ; " °
avec L = T + U
Mais il est bien clair que U n'a pas ici la signification habituelleEn portant T + U à la place de L
d_ 3-T ^ 3T + d_ 3U _ 3U = Q
dt 3q! " 3q. dt 3q! 3q.
on a immédiatement par identification
3U d 3UQi - 3?7"dt^[
Ce cas abordé initialement comme recherche formelle a trouvé une applicationremarquable en physique.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
- 511 -
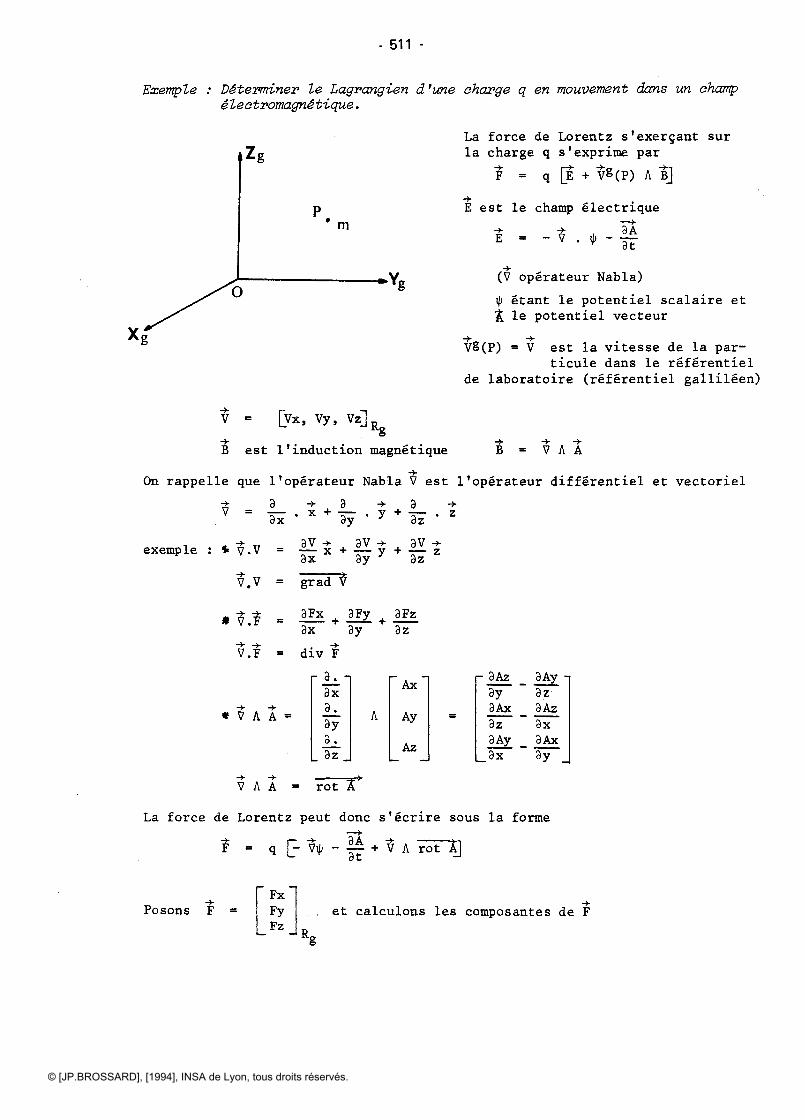
Exemple : DêtermineT le Lagrangien d'une charge q en mouvement dans un champélectromagnétique.
La force de Lorentz s'exerçant surla charge q s'exprime par
F = q [E + VS(P) A B]
-*•E est le champ électrique
- » • - » " 3 AE = - V . #-.g£
(V opérateur Nabla)
i|/ étant le potentiel scalaire etî le potentiel vecteur
Vë(P) = V est la vitesse de la par-ticule dans le référentiel
de laboratoire (référentiel galliléen)
V = [Vx, Vy, Vz]Kg
-+ . , , - > - * - >B est l'induction magnétique B = V A A
On rappelle que l'opérateur Nabla V est l'opérateur différentiel et vectoriel
+ 3 -* 3 - ^ 3 ->.v ' -5Î- x + 3? • y + 3F- z
exemple : * $.V = |Ï$ + |ÏJ + |ÏÎ3x 3y 3z
V.V = grad $
»o = |a + |a + |2s.3x 3y 3z
V,F - div F
r Ai "i r A. i raAz -3Ay iâx 3y 3z
-, £ A t a - A A 9Ax 9Az* V -A A = r— A Ay = T —3y J 3z 3xiji A 3Ay 3Ax. az-J L J L-sâT " âjr.
->• -> —— =sr>-V A A = rot A
La force de Lorentz peut donc s'écrire sous la forme
f = q [1 - M + A Fl]
-»• r FX iPosons F = Fy et calculons les composantes de FFzJR
Rg
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
- 512 -
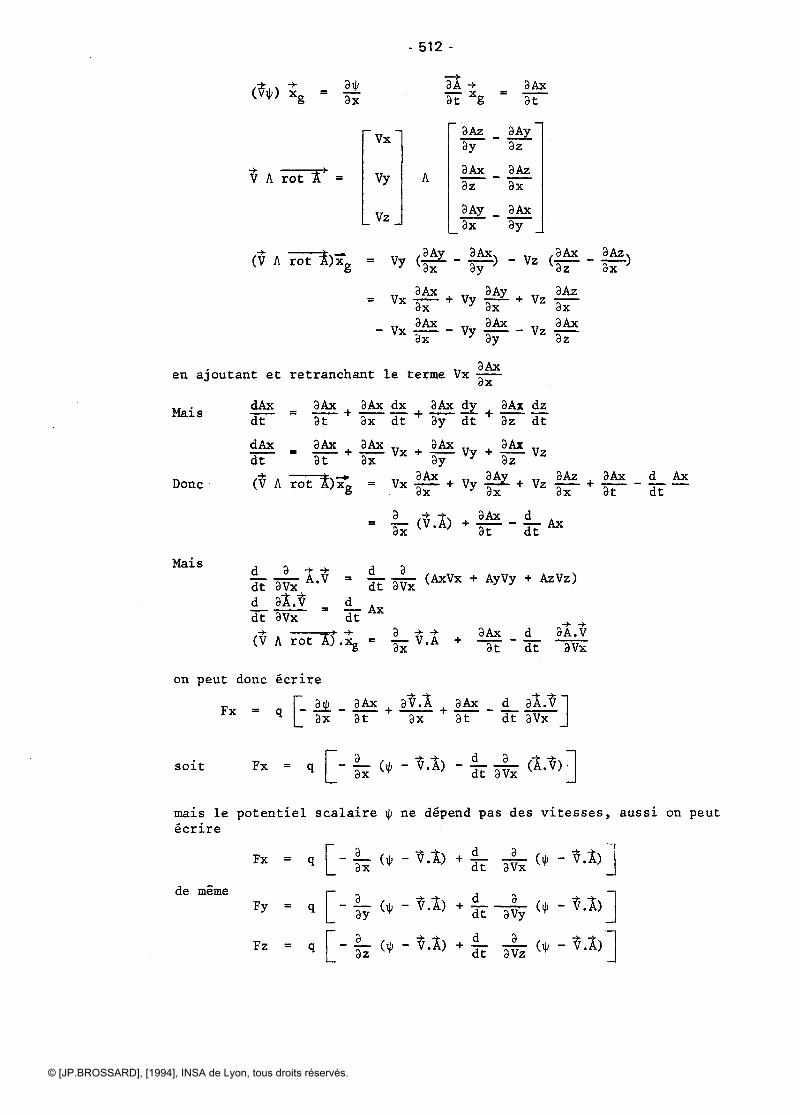
,*.»•* 3if IJl" -»• 3Ax(V*> Xg = l^ 3F Xg - ~
F v* 1 f lé* - Ml"3y 3z
3 , =F* T, A 3Ax 3AzV A Ï S n T - Vy A â^---^
Vz 1AZ..3AXL VZ J 1_ 3x 3y
/£ A —r~=if\— TT /3Ay 3Axx T7 ,3Ax 3Azx(V A T5^)xg = ?y e^L --_.)- Vz (^- - 5J-)
„ 3Ax „ 3Ay „ 3Az• Vx 37-+ yy ^r + Vz3T-- VX | L - Vy |£ - VZ |dx ^ 3y 3z
9Axen ajoutant et retranchant le terme Vx -—
„ . dAx 3Ax 8Ax dx BAx dy 3Ax dzM^Q 1 Q • • . i. *"" «1. „^^„,,m^ m*mmm I _ mmj!*m t •••••m
dt 3t 3x dt ^ By dt 3z dt
If - M* * If* * * f* * * {£ *^ / A —T N- tr 3Ax TT 3Ay _,_ „ 3Az _,_ 3Ax d AxDonc (V A rot A)Xa = Vx -5— + Vy -5-*- + Vz •=-— + .~ -rr —8 3x J 3x 3x 3t dt
3 /* t\ ^ -3Ax d A= ^(V*A) + —-dT^
Mais a . - . aÏÏFmA'V = âF (AxVx . AyVy + AzVz)
d 3J. d .dt "3Vx~ ~ dt ' ^ /tr . Tt -»• 3 ^ t 3Ax d 3A.V(V A rotlj.Xg = - V.A V — - -
on peut donc écrire
_ F M 3Ax 3 >1 3Ax d_ 3J. 1- q |j 9x - at Bx 3t - dt 3Vx j
soit Fx = q[-|-(/- î).|..L.(î )]
mais le potentiel scalaire ty ne dépend pas des vitesses, aussi on peutécrire
Fx = q[-|_( -^i)+|_ _|_( - .i)]de même n ^ j ^ n
Fy - q^âyCt-^D^-lyrt-^J)]
Fz , , [- fj (* - ti.î) * |j (* - *.î)]
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 513 -
Les équations de LAGRANGE pour la particule s'écrivent
d__ai__il = x, = Vxdt 9x' 9x ^
l_il_--§!_ = Qy avec y' = Vydt 9y' 9y ^
fefr i-- *"*"
La puissance virtuelle développée par F est
&g - * •r<»«_/ = Fx.x1* + Fy.y'* + Fz.z'*
d'où immédiatement Fx = QxFy » QyFz = Qz
Posons U = - q ty + q . V . A
Ox = +M-^L9JLQx + ax dt 9VxQy = +H-1.9JL
^y ay dt 9Vy3U d 9U
Qz = "âl-dFâW• -*
Le Lagrangien L est donc L » 'T - q ^. ••*• q V . A
Cette expression a été appelée fonction de force électrocinétique parSCHWARZSCHILD.
E. Intégrales premières
Nous avons déjà vu le grand intérêt de rechercher à priori lesintégrales premières (à l'occasion des théorèmes généraux^ Les équations deLAGRANGE permettent leur recherche quasi systématique.
!.. Intégrale première linéaire en q| ;
On obtient immédiatement des intégrales premières linéaireslorsque l'équation de LAGRANGE relative à l'indice i se réduit à
5L -JL = o ce qui donne T-y = ctedt 3q£ àq^
Nous avons rencontré ce cas dans un certain nombre d'exercices, par exemplele mouvement à force centrale ou le mouvement de LAGRANGE et POISSON d'unsolide ayant un point fixe.
Il se pe-ut que certains paramétrages cachent ces intégrales premièresimmédiates. Etudions par exemple l'oscillateur harmonique à deux dimensions
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 514 -
Supposons le point P attiré parle point 0 par la force
%/P = - k r Xi
r = |ÔÊ|
La fonction de force estkr2
U - ; - *|- + c
* Utilisons d'abord un repérage cartésien
ÔP" = [x.y.O}
T = jm (x12 + y'2)
U = - | (x2 + y2) + C
Les équations de LAGRANGE s'écrivent immédiatement
m x" + k x = 0
m y" + k y = 0
* Utilisons un repérage en coordonnées polaires
ÔP - r K!
(Sg.îx) = <(.Te = im (r'2 + r2 <).>2)
u - -•*£+ c
jgf.) . -gr.- -.'
f - - 'V2
au .^7 = - k rd'où l'équation m r f l - m r <j>! + k r = 0
j£^> S • »<=i^ 9<p
I! - °09
!F • cteo <p
Ifr - - <2 »'
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 5 1 5 -
d'où m r2 <)>' = C intégrale première linéaire en $f .
C'est la loi des aires, ce que l'on sait car la force est centrale. Lerepérage en coordonnées polaires la fait apparaître immédiatement.
On rencontrera le même problème dans le cas de l'oscillateurharmonique spatial isotrope.
2. Intégrales premières quadratiques. Intégrales de PA1NLEVE
a) 5âEEÊl»£22£ÊEBêS£-IllSëISÎÊ-£ÎBË£î3HË
Tg = i I [vg(P>]2 dm
P6S
«*• *8<p> " 1: " i + °°° * HT "i * 00° * S; <A * H
[?8<«]2 - j, j, H:!|7«i «j * "0 + 2 j |Lf| + (§*1=1 J=l ^1 J 1=1 1
On fait la double sommation en faisant prendre à chacun des indices séparé-ment toutes les valeurs ; un terme tel que
(|L.)2 qj2 (i=] j = 1)
SP 9Py figure une seule fois ; un terme tel que (—- -—) q{ q2 (i=l j=2)y figure deux fois (le produit scalaire est ^1 ^2
commutâtif)
Par exemple, si on a deux paramètres qi et q2
ps(P)]2 . (n-)2qi2.2n-!!-qiq. +( |^ql2+ 2 9P 3J^ + 29P 3P.
3q! 9t 9q2 3t+ <H>2
Par suite, l'énergie cinétique T peut s'écrire
l8-^[j,j,^ ilrii-^I^lir-i-^M?'2^L ' J ' pes J l ' pes pes J
fl? 3? ,Posons a.. = j — — dm
pes r J
>i • II--I- « - fcH»'-pes pes
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 516 -
T8 - J Z ï «n *i<U + I 2 bi q[ + CL [_i-l j = l J J i-1
n nPosons T2 - ••=• I I a., q! q!
i-1 j-1 J J
. T! - | I 2 bi q{* i=l
T0 = C
L'énergie cinétique est la somme de trois termes de degrés respectifs 2, 1, 0par rapport aux qî
T - T2 + TI + T09P
Si le paramétrage ne fait pas intervenir le temps — = 0. Alors T = T2
T est alors une forme homogène du second degré.
Exemple de calcul de T- la liaison (S1)/(S2) est une ^liaison prismatique, d'où Y0 = Yj
- la liaison (S2)/(^i^ est uneliaison rotoïde parfaite d'axeZ2 = Zx
-• la liaison (S3)/(S2) est uneliaison prismatique d'axe X2
Le mouvement de 0, est imposé—>. 1 0 -+OOi - j Y t2 Y0
Calculer l'énergie cinétique T°de (S3)
T° - Im [V0 )]2
Repérons la particule P pour r et 6 car le mouvement de C est connu à priori,0 et r sont deux paramètres indépendants.
V°(P) - V^P) + VÎ(P)
VX(P) = r1 X2 H- r 6f Y2Fcose -sinG 0] [r f 1 Frf cos'e - r 0' sin0
V^P) = sin0 cos0 0 r0' = r' sin0 + r 0 ' cos0
L ° ° y L9 J L ° J.RJ
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 517 -
^J(P) = $?«>!) = Y t Y 0
_^ l~r ' cos6 - r 6' sin6 ~V°(P) - r1 sin6 + r 6' cos6 + jt
L ° JE,
[y°(P)]2 = r'2 + r2 0f2 + 2yt sin0 rf + 2yt cos0 0f + y2t2
T° = ~ m :(rl2 + r20f2) + ~ m (2yt sin0 rf H- 2ytrcos0 0f) -H j m y2 t2
T2 = .m (r'2 + r2 e»2)
II = -i m (2yt sin0 rf + 2ytr cos0 0f)
T0 = Im y2 t2
Remarque : T£ ne contient pas de termes rectangles car on a affaire à descurvilignes r et 0 orthogonales
S - H • - ° en effet Ôf = r $2
9? ^ 9? 3X2 ^"5F = X2 "Se" = r W * r Y2
b) ïS£âS£âlÊ£_âË_2èiSÏ;SYlLes équations de LÂ6RÂNGE s'écrivent
d 3T__ 3T_ _ -.dt3q> 3qi -
V X
- multiplions les deux membres de l'équation par q{
, d 3T . 9T n . „ .qi dtRr-ql^T - Qi^i vi - '.••• n
- faisons la somme membre à membre de ces n relations
? . d 3T ? . 31 5 . ,
j, q i3ïâîT- ^,q i^I = j, Q iq l
i n • d V . 9T-calculons — _^ q! r
d y , 3T r „ 3T r t d 3T
^ i=i qi î = i=i qi âqT ii, qi â5T
Donc le premier terme de la relation s'écrit
r . d 9T r „ 3T A d r , 3TJ/iltâqT - - j^iâqT*^ J^IâqT
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 518 -
La relation s'écrit donc :
A n ST n ST n 3T nd r t oT r „ oT P dT , v r\ tIF J, qi 3qT - I 1Ï IqT * J, 3qT *! = J, ^i
1=1 ^1 1=1 Hl 1=1 Hl 1=1
11 *W n C*T n *T U 'iT'V oT . r oTo _• r dïi * r oTn t111218 2 - ^ r q î = J, ^t^^^ aïïi:^4-.1, i4qi1=1 ^i 1=1 Hi 1=1 ni 1=1 Hi
D'après le théorème d'EULER sur les fonctions homogènes :
j,Hr«i • 2T2tTlD'autre part, T étant une fonction des q^, q{, t on a
dT r 3T i -L V 3T .. j. ST
^ " j, W9l il T «i * ÏFdonc les deux derniers membres de la relation s'écrivent
- ? IT i* - ? 9T - - d T + 3T
iii **Lqi iii 3<ii " dt 3t
Finalement on peut écrire
f\ f\ î Tft (2 T2 + T!) - §£ (T2 + Ti + To) + |i - I Qiq{
i=l
, n ST^(Ta-To) = l Qiqi-f
1=1
S'il existe une fonction V = V(q , .qj, qn, t) telle que
dV Y - n t BT
dt = . Qiql -7t
on aura l'intégrale première dite intégrale de PAINLEVE
T2 ~ T0 = V + Cte
c) Remarque sur 1'intégrale_de_PAINLEVE
L'intégrale de PAINLEVE ne contient jamais explicitement le temps.La relation d'existence de la fonction
' • £- j.^i-Hmontre que le second membre ne peut contenir de termes quadratiques en q|car
£ •Hr^ooo'lïr'i'l^g
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 519 -
Par suite la partie de T qui donne des termes quadratiques enq{, c'est à dire T£ doit être indépendante de t. En dérivant l'intégrale dePAINLEVE par rapport au temps considéré comme variable indépendante
aTp _ j>Vat at
| (TO + v) = o
II s'ensuit que T + V est indépendant de t.
Donc finalement T£ - TQ - V est indépendant de t
d) Cas_garticuliers
En pratique nous rencontrerons l'intégrale de PAINLEVE sous lesformes suivantes
a) II y a fonction de force et les liaisons sont parfaites au sensde GAUSS
BUDonc Q. = -5—1 9qi
d ,T _ T s . v 9U flî - Hdt (T2 V .- .^ 3^q^ at
du r au . au5t • j, âiT 'i * ât
IF^-*») - f -IrB + ro
Si on a V tel que |~r - 9(T^ U) on aura l'intégrale de PAINLEVEsous la forme
Ta ~ T0 « U - V + Cte
- la liaison (Si)/(So) est uneliaisoij prismatique parfaited'axe Y0
- la liaison (82)/(Si) est uneliaison rotoïde d'axe TL\
- la liaison (83)/(Si) est uneliaison prismatique d'axe X2
Toutes les liaisons sont parfaites.La raideur du ressort est k et salongueur à vide est rg. La massede (3) est m. ¥5 est orientéepositivement dans le sens de laverticale ascendante. Le mouvementde QI est connu et tel que
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 520 -
OO'i = •=• yt2 YQ. Il y a donc deux paramètres indépendants 9 et r. La fonctionde force est
U = - | (r - r0)2 - mg (| yt2 + r sin6) + C
U - U(6, r, t)
L'énergie cinétique est T° déjà calculée
T° « 1 m (rt2 + r26'2) + y m (2yt sine r' + 2yt r cos9 6')
+ lmY2t2
0 . n 9U 3TCalculons — et _ .
9U_ = - m g y t
£\m
•r- = Y(r! sin6 + r 6f cos6) m + m y2 tot
|TT (T + U) « 7(r? sin0 •«• r6f cos0) m •+. m Y(Y-g)tot
t2Posons V = m y r sin6 + m Y(Y~g) y"
On a immédiatement 4r* = TT (T+U) d'où l'intégrale de PAINLEVEdt ot
Ta - TQ = U .- V + Cte
1 m(r'2 -H r2 6'2) - 1 m Y2t2 - - | (r-r0)2 - mg(l Yt
2 * r sine)
t2•- m y sine -m Y(Y""g) —
soit après réduction
1 m (r'2 + r2 e'2) - - m (Y-*-g)sine - | (r - r0)2 + C
on constate bien que cette intégrale ne contient pas le temps.
g) II y a fonction de force U = U(qj, t), les liaisons sont parfaiteset le lagrangien indépendant de t
iffiffi. - o 1 » - o
La relation (T2 - T0) - ff - | (T+U) peut s'écrire fL (T2 - T0) - ~
ce qui donne 1'intégrale de PAINLEVE sous la forme
T2 - T0 - U + h
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

Les masses P et PI ont leur centre d'inertie assujetti à se mouvoir sur uneparabole située dans un plan OXiZi. Ce plan matérialisant(Si) tourne autourd 'un axe fixe ZQ = Zi. L'équation de la parabole dans ce plan est x2-2pz = 0.ZQ est la verticale ascendante. Toutes les liaisons sont parfaites, la massede P et PI est m. On posera 2m * M. On négligera la masse des tiges de liai-son. On supposera en outre que la vitesse de rotation ' = co = cte. Montrezque le système est un système à intégrale de PAINLEVE.
L'énergie cinétique est T = ~m [y°(P)]2.2
mais V°(P) - V^P) + Vi(P)
V^P) = xf Xi + z1 Zx
VÎ(P) » Sî A ÔP - i|;f Zi A (xXj + zZi) » u> x Yx
0/T|N . , 2x xf
V (P) = u)x mais zf = —sz 'L JRi
r**V°(P) = eux
|.x'LP JRl
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 522 -
r\
T° - .In Ri + pOx'2 + o>2 x2]
T° = T2 + T0
T2 = 1M ( i + ||.) x'2
TO = l M < o 2 x 2
La fonction de force est U = - M g z + C
0 - - ff K> * C
+ L ^équation de. LAGRANGE s 'écrit (il y a un paramètre indépendant)
d_ 9T 11 1£ - ndt 3x' ~ 9x " 3x ~
3T „ ,, _,_ x2^ ,^p. - M (1 +??) x'
l-gr - M ( 1 + ^ ) x " + ^ x , 2
|I - ^.x x12 + M a)2 x3x p^
M Mgx3x " p
Lféquation de LAGRANGE s'écrit :
M(l + 4)x" + T- x'2 - M co2 x + î& . x = 0P P P
(1 + 2^) x» + 2^. x-t-2 + (Jt - .W2) x = o
+ Intégrale de PAINLEVE
Calculons T + U
T + u . I M £(1't 2£)x.2 f 2 X2J . || x2 + c
^ T + U ne dépend pas explicitement de T par suite on aura— (T + U) = 0 et l'intégrale de PAIN-LEVEo t
T2 ~ T0 = U + h
IM [(1 * .) x'2 -co2 x - -^x2 + C
(1 + 4> x12 - ( 2 - Â> x2 + C'P P
Intégrale première quadratique. Remarquons qu'elle aurait pu s'obtenir àpartir de l'équation de LAGRANGE. L'intérêt de la méthode est de l'avoirécrite à priori.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 523 -
+ Intégration de l'équation du mouvement
Prenons les conditions initiales suivantes. Pour t = 0 x = XQ2 9 X1 = XQ
on a immédiatement G1 = (1 + 2%) xj2- (co2 - •&) XQon peut immédiatement écrire ^ p
/ 3f 33:_ SB F / ^dt ' ..£
8 devant être convenablement choisi et l'équation du mouvement s'obtient parquadrature x
dx " _
zr-gcfr-to)/(a)2 -|)x2 + C'
/ x2~/ •» +frxo
Cette équation donne t = t(x) et par inversion on a x = x(t)
Remarquons qu'une discussion qualitative du mouvement serait facile à partirde l'intégrale de PAINLEVE. La réalisation pratique de ce système est connuesous le nom de régulateur à bras croisés de Farcot qui réalise approximati-vement le guidage sur parabole (centre oscillateur)
7) II y. a fonction de force au sens stricts le repérage se faitindépendamment du temps
T = T£ TI = 0 TQ = 0
L'intégrale de PAINLEVE s'écrit 4r T = Irdt dt
C'est l'intégrale des forces vives T = U + h dont nous avonsrencontré de très nombreux exemples
Remarque 1 : on appelle quelquefois l'intégrale de PAINLEVE intégrale desforces vives généralisée
Remarque 2 : l'intégrale des forces vives avait été obtenue dans l'étude parles théorèmes généraux à partir du théorème de l'énergie ciné-tique. On peut facilement obtenir ce dernier théorème à partirdes équations de LAGRANGE dans certaines conditions.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 524 -
7.1.8 LES PARAMETRES NE SONT PAS INDEPENDANTS MAIS LIES PAR DES RELATIONS DE LIAISONHOLONOMES OU NON HOLONOMES
Les relations de liaison peuvent se mettre sous la forme générale
f ^ C q i •••<li ••• Çn't) " ° ) J = l ••• h
(I) J ?aj iqî + ... + aj^ + ... + ajnq^ - bj ) j * 1 ... 1
Remarquons tout d'abord que si nous avions des liaisons de type holonome nouspourrions nous ramener immédiatement à l'étude que nous venons de faire.
Supposons en effet que les seules liaisons existantes soient dutype :
£j(qi ... qi ... qn,t) - 0 . j = 1 ... h
on peut toujours tirer h paramètres en fonction des n-h autres, et alors seramener à n-h paramètres indépendants. Donc du point de vue de la théorie iln'y a pas de difficulté nouvelle. Si l'on garde ces liaisons dans certainscas, c'est uniquement pour une raison de commodité.
Par contre, il en va tout autrement pour les liaisons du type nonholonome^
aj,qf + ... + ajiq{ + ... + ajnq - bj
car par hypothèse elles ne sont pas intégrables et par suite nous ne pouvonspas exprimer certains paramètres en fonction des autres grâce à ces relations.
Si nous conservons les liaisons non holonomes, c'est pour une questionde principe et si nous concervons les liaisons holonomes c'est pour une ques-tion de commodité.
A. Intérêt d'une transformation virtuelle compatible avec les liaisonstelles qu'elles existent à l'instant t
Reprenons l'équation générale de d'ALEMBERT sous sa forme générale
[Ql - Ai]q{* + ... + [Qi - Ailqj* + . .. + . Qfe.- A^q^ - 0
Qi étant le coefficient de la puissance virtuelle développée dans une trans-formation virtuelle quelconque.
Les équations de LAGRANGE s'écrivent A£ = Q£ soit
d 3T 3T _dt aq[ 3qi "
Mais dans ce cas le coefficient Q^ correspond à la puissance virtuelle déve-loppée par toutes les actions mécaniques y compris les liaisons parfaites.Il y aura donc intérêt à prendre une transformation virtuelle compatible avecles liaisons telles qu'elles existent à l'instant t.
Désignons par (# les coefficients de la puissance virtuelle dévelop-pée dans une transformation virtuelle compatible avec les liaisons tellesqu'elles existent à l'instant t.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 525 -
Ces transformations sont définies par
i-'-" |£«r+-*!ïX US* ' °j = 1 ... 1 | ajiqi* + ••• + ajiqi* + ••• + ajn<ln* - 0
Si nous prenons de telles transformations, c'est à dire des vitesses vir-tuelles vérifiant les équations ci-dessus, 1'équation de d'ALEMBERT s'écrit
CQÎ - A{] q{» + ... + [Q* - Ai] qj*,+ ... + [Q* - A^ qn* = 0
Les coefficients Q* sont plus simples à calculer que les Qi mais il faudraexprimer alors que les q{* sont astreints à vérifier le système (II). C'estce qu'a fait LAGRANGE avec la théorie des multiplicateurs.
Remarque : le système (II) peut se mettre sous la forme unique
i : i i'i ' {«ji'I* * ••• * "n'i* * •••+ «inC - ° }du point de vue mathématique ce sont des équations linéaires en q!
B. Equations de LAGRANGE avec multiplicateurs :
Nous devons écrire que l'équation de d'ALEMBERT n'est vérifiée quesi les q|* vérifient le système (II), c'est à dire que nous devons avoir si-multanément :
aiiq{* + ...+ aiiq{* + ...-.+ alnq^* - 0
a..q'* + ...+ a..q{* + ... + a. q * = 0 m équations
a .q.'* + ...+ a .q!* + . .. + a qf* = 0mlnl mini mnnn
[AI - QÎlq-î* + • • • + [AI - Qflq{* + ... + [An - ojqi* = o
équation de d'ALEMBERT
Or un théorème d'algèbre nous indique : "pour que les qf vérifiant le système(II) vérifient une équation supplémentaire il faut et il suffit que cetteéquation soit une combinaison linéaire des équations du système11. Donc siAI ... Xj ... Xm désignent des scalaires à priori arbitraires appelés multi-plicateurs de LAGRANGE, on a
[Ai - QtM* + ... + [Ai - Q*]q{* + ... H- [ - Q q * =
Mall<li* + ... + aiiql* + ... + ain^n*)+ ^j(«jiq[* + ... + ctjiqj* + . . . . + «jn^*)-+ \n<«mi«li* + • • • + «milî* + • « • + «anO
on obtient donc la forme linéaire en q^* :
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 526 -
[A! - Q* - x l0 li - ... - X j d j j - ... - xmamjqj* + ... +^ - Q* - X101. - ... - X.cx.. - ... - Am%i]q!* + ... +
[À - Q - Xicxi - ... - A.a. - ... - X a Iq'* = 0L n n x xn j jn m mnjnn
Les m multiplicateurs étant à priori arbitraires nous pouvons les choisirde manière qu'il annulent les m premiers crochets de la relation précédente.D'çù TU équations
*Ai - Qi - M a l l ~ • • • "" ^ - a * - ... - X a _ = 0I L x^ l X 1 J Jl m mlA. - 0. - Xi ai.-...- X.a..-...- X a . = 0i i -1 -1! j ji m miA -Q*-Xiaf -.-..- X. a. - ... - X a = 0m Tn x xm j jm m mm
Mais alors les n-m vitesses virtuelles qui figurent encore dans l'équationde d'ALEMBERT sont arbitraires. Leurs coefficients doivent être nuls pourque l'équation soit vérifiée quelles que soient ces vitesses, c'est à direque les derniers crochets doivent être nuls.
*A , , "" Q , " " X i a i / , 1 N — ... — X . ex. / , 1 N "* ... ~ X a , | 1 N ^
m+1 ^+1 x x(m+1) j j (m+l ) m m(m-H) = 0
A - 0 - Xi a, • " . . . — X. a . - . . . - X a =0n TI L 1-n j jn m mn
Autrement dit, tous les crochets doivent être nuls. On obtient donc lesn équations de LAGRANGE
d 3T 3T n* -dt^qT""^qT = Ql iai1 •" J^1 "•• tnaml
1 IF HT" HT = Qi + x i a i i + • • • + x j a j i + •- + VmiA Ci T1 Si T ^>
dF "9^ " 9^ = Qn + Xlai* + ' ' ' + XJaJn + ' ' ' + Xm°^n
que nous pouvons écrire symboliquement
d 3T 3T .* . r .dT^T-^T = «i + .1, XJ °Ji
Remarque 1 : comme précédemment nous avons* * * * ¥
Qi = QiD + QiLe + QiLi + QiC
Si le système est formé de solides parfaits à liaisons parfaites :
<c = o
^Le= °
^Li- °
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 527 -
Les équations de LAGRANGE s'écrivent alors :
d 3T 3T * rdt-^T-^T = QiD+.^jaji
Remarque 2 : faisons le bilan des équations et des inconnues
( n inconnues paramètres : q.î )inconnues : { m multiplicateur de LAGRANGE } " + n
équations : { n fiions de LAGRANGE ' T,\ m + n| m équations de liaison (système I)j
Q. étant connu en fonction de l'état cinématique du système on a autantd'équations que d'inconnues ; la solution complète est donc possible
C. Exemples de mise en équation et de résolution
1. Exemple 1
Un système est constitué de trois solides (Si), (82), (83)formant un essieu et de deux roues de rayon a en mouvement sur un plan(0,Xo,Yo) horizontal. Le plan de symétrie des roues perpendiculaires àl'axe coupe l'essieu en 02 et 03 tels que 103021* 2a. La masse de l'essieuqui est une barre homogène est m, , celle des masses n^, celles-ci pouvantêtre assimilées à des disques homogènes. L'essieu porte en outre en sonmilieu 0 une masse supposée ponctuelle m. On oriente 0203 par AI tel que0302 = 2a Xi. Xx arbitraire.
A ''(Si) on lie (RI) tel que ?i « 10 et 1 = 1 A îi. On repère
(Sj) par ^00X = (x, y, a)Ro
(X0, Xi) - y
A (S2) on lie (R2) : (02, X2, Y2, Z2)->• -+X2 = Xi
Y2 arbitraire (sens)
Z2 « X2 A Y2
On repère la rotation de (R2)/(Ri) par <|>2 = (Yi ,Y2)
A (S3) on lie le repère (R3) : (03, X3, Y3, Z3)-*- •+X3 = X!
Y3 arbitraire-> -> ->Z3 = X3 A Y3
On repère la rotation de (83)7(81) par <f>3 = (YI ,Y3)
On suppose en outre qu'il y a roulement sans glissement au contact en I etqu'il y a glissement parfait au contact en J.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 530 -
b) Calcul de l'énergie cinétique
T° = TI + T2 + T3 + Tm
T! = ymiLv°(Oi)]2 + }aïî0l « ï -f o o o ~i . ro
o
, T! = - ImiCx ' 2 + y'2) +1 (0,0,iJ,') 0 ^- 0 0
_ 0 o 5i|iJL + f .
T! = Ym i ( x ' 2 + y '2) + ï (miy^'2>
T2 . |m2 ^°(o2)j2 + Y « 2 . T02 . 3s
-»• - F $ 1 7 - F o R n (le corps est de" 2 - 0 I0 - 0 B 0 révolution)
U'J^ Lu 0 BjR 2 ) R i
avec A = m2-r—
B = ji- (3a2 •*• h2) h étant l'épaisseur du disque
m? a2B » -f-
T2 a T (x'2 + y'2 - •2ax''l''f siniP + 2ay'i);' cosijj + a2^'2) m2p
+ j (m2 l2-*'2 + m2 J-l'12)
on a immédiatement TS en changeant a en -a, <|>2 en <j>3
T§ = j m2 (x |2 + y '2 •+ 2ax'r sin* - 2a y'^1 cos'J' + a24>'2)
^m 2(f^<t>52 +^-* ' 2)
T° = 4-m (x l2 + y'2)m 2.
T° = j Qm1+2m2+m)xl2+(m1+2m2+m)y
f2+(m1|^a^m + m2y- J
c) Calcul de la puissance virtuelle développée dans une transformationvirtuelle compatible :
- puissance virtuelle développée par les poids
La cote des centres d'inertie de chacun des solides reste constante,la fonction de force est U = cte. Par suite la puissance est nulle
& - °- puissance virtuelle développée par les liaisons intérieures.
Elle est nulle car les liaisons sont parfaites
P'u - -
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 531 -
—• puissance virtuelle développée par les liaisons extérieures
Elles sont parfaites (roulement sans glissement en I, absence defrottement en J). Donc finalement on aura
6JT* = 0 donc Q* = 0 soit
Q* - 0 ; Q* = 0 X; Q = 0 ; Q*3 = 0
Ceci pour des transformations virtuelles compatibles, c'est à dire pourdes vitesses virtuelles vérifiant
S x1* - a(ip f* + 4>i*) sinij; « 0
y f * + a(i j> f* + <(>£*) cos^ « 0
d) Equations de LAGRANGE
•^• feSr- i -» .(m! + 2m2 + m)xf l « X j
•^'^^-H- ^(mx +. 2m2 +-m)y1 1 « X2
(^jfP J ^«p Ji'Tn
*<?C (l|;) î d t ' 3 ? r ~ 3 ? " ~ X l S 8in* + X2 S C°S4<
a2 5(mi-^ + y maa )^" = - Xi a sint + \2 a cosi|)
*5f<*2> :fE||T-f^- - - Xj a sin* + X2 a cos^_2
m2 ~ô" ^2 = ~ ^i a simj) + X2 a cosij)
9^.\ . d 3T 3T _*oC<*3) . V dt -§£5 ~ 8^7- °
*§ « 0
e) Résolution
On a donc les équations
(mx + 2m2 + m)xfl = Xx (D
(m! + 2m2 + m)y lf = X2 (2)a. 5 oml "T" + y m2a )^n = ~ X j a sinijj + X2 a cosip (3)ami y- cf>2 = - X.i a sin^ + X2 a cosifj (4)
*5 '-' 0 (5)
auxquelles il faut ajouter les équations de liaison
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 532 -
x1 - a \|>' sinif; - a <j>2' simj; = 0 (6)
y1 + a ij/f cosij; + a <j> ' cosip = 0 (7)
soit 7 équations pour 7 inconnues x, y, fy, < f> 2 , $3, X l 5 X2 .
a) IIi3iSâ]i:î2S_$lê£.J&Hl£^^paramètres
II faut éliminer les multiplicateurs qui sont des inconnues dyna-miques afin de se ramener à un système différentiel.
Posons M = rnj + 2m2 + m
Xx = M x" x1 = a (f + <j>£) sin*
X2 = M y11 y f = -a (t|/r + <|>2) cosif;
x f f = a(i(;fl + (j)^f)sin^ - a i | ; fOI> f -*-c|)^)cos^
y" = -a(^f! + (j)^!)cos^ + a ^ f ( ^ f -»-<()2)sin\j;
\l = M a(ipf! + <()^f)sin^ + M a i j ; f (^ f + 4^^°^
\2 *--M a(tj;ff + -<frîf.)cosi|; + M a ^ f (^' + $2)situ);
3 ) E2££2S§_ce s valeur s_d§ns_l e s _e§uat i ons_ j[ 3l_e t_Xâl :o
(Hi5_ + |. m2a2)^" - - M a2(i|jlf + <()^f)sin2^ - M a2 ij;'^1 + t()^)cos^ sini);
- M a2(^" +-c|)g)co82i(; + M a2 ^ f ( ^ ? + <f>2)sini|> cosip
- - M a2(i);lf + < f r 2 ) -
soit encore
(E2^ + I m2a2)^n "*" M a2^n * *S> = °2
de même '2ly- cj)^1 - - M a2(^ f l + (|)^f)
Ces deux équations s'écrivent :
!
a2 (^ + |- m2 + mx + 2m2 + m)ij;ff + a2 (mx + 2m2 + m)c()2 « 0
a2 (mx + 2m2 + m)i|>lf + a'2(2l + mi + 2m2 + m)<j>^ » 0
y) pour résoudre 22UË-âY22£-Ë2S£-l£S-.É3iîa£Î£2S-Ëi£êB£Î£llË£ :
(m + | mi + | m2) ij;11 + (ma •+ 2m2 + m) - 0 (3Ï
3(ml + 2m2 + m)\j/! + (y mx + 2m2 + m).^ = 0 (4)
.-Va - ° (5>x! - a \Jj f sini); - a (j)^ sinip = 0 (6)
y1 + a ip1 cosijj + a 4>2 cos^ = 0 (7)
Les équations (3) et (4) sont des équations linéaires en ty" et cj)2. Ledéterminant est
3 3 5A = (y mj + 2m2 + m) (m •*- -r- m1 + 2m2 + ^ m2^ " (ml + 2m2 + m)2
3 5 3A = (y m^ •+ 2m2 + m)2 + -r- m2("ô" ml + 2m2 + m) "" (mi + ^^ "*" m^2
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 533 -
donc A ^ 0. Par suite le système admet seulement la solution banale
i ib" = 0 ^ , " \1) = il^n + ^ô tIn n On a donc A - I + A» t-<j>2 = 0 <()2 - 920 + 920 t
L'équation (5) donne (J>3 « 4>3-pt * 30En portant les solutions dans (5) et (6)
x1 . - - a ( + <f>£0) sin(*ô t + <J,0)
y1 = -a (i|;j + 20) cos( ô t + ipo)
x = a 0 C08WÔ t + Q) + ci
y .. a *Ô^- *io. 8in(<,ô t + +Q) + €2
Le centre d'inertie commun Oj décrit donc un cercle de centre C tel que
r GI "ÔÈ = C2 avec
L° JRQ
C, - K0 - a t^* «» costo C2 - y0 - a tij fi» sln»0
^) âê£ËESÎ2§£Î2S-âÊ-^l-ê£-^2
Xi = M x f f
\l » - M a(^5 + < f > 2 o ) ^ Ô 2 sin(^Jt; + t(;0)
X2 - - + M a-(*J + <|>2oHc)2 cos(.*Jt H- *0)
f) Signification des multiplicateurs X^ et ^2
Appliquons le théorème de la somme géométrique à l'ensemble
F02 + F03 + P - M jj
Posons $02 = {X2, Y2, Z ]R
^03 = t^> ^> ^slp (liaison parfaite)
en projection
X2 = (mx + 2m2 + m)xff
Y2 = (m! ••+ 2m2 + m)y"
Z2 + Z3 " (ml + m2 + m)g * 0
en comparant avec (1) et (2) on constate que AI = X2
X2 = Y2
Les multiplicateurs AI et \2 sont donc les composantes de lfactionde contact de (89) sur (82) sur les axes (O,XQ) et (O,YQ)
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 534 -
g) Equation de LAGRANGE sans multiplicateurs
Prenons cette fois une transformation virtuelle quelconque (ellesera toutefois astreinte à respecter la liaison de contact).
La puissance virtuelle n'est pas nulle.
La puissance virtuelle développée par les poids est toujours_^nullede même que la puissance virtuelle développée par l'action de contact FQS»Par contre celle développée par pQ2 ne l'est pas. Elle vaut
/3y5* _ •£ t7°*f-ny = FQ2 V2 (I)
"x f * - a(* f* + .<(>£*)sinij; ~
($P* = (X2, Y2 , Z2) y'* + a(* f* + <|>|*)cos*
L °($P* » X2x f* + Y 2 y f * + (-X2a sinip + Y2a cos^)^ f> r + (-X2a s in* + Y2a co8i(;)<fi*
^^* = Qx x f * + Qy y'* + Q^ *lllf + Q^ 4l*
Les coefficients de la puissance virtuelle ne sont pas nuls bien que la liai-son soit parfaite. Les équations de LAGRANGE s'écrivent alors
d 3 T 9T n . . - u t u— ynr - -g—7 - Q£ soit comme le premier membre n'a pas change
(mi + 2m2 + m)xff = X2
(mi + 2m2 + m)ylf = Y2
a2 5(mj — + -r- m2a
2)*lf = - X2 a sin* + Y2 a cos*
a2m2 y- <f>2 = - X2 a sin* + Y2 a cos*
+§ - o •L'interprétation des multiplicateurs est alors immédiate.
2. Exemple 2 (système holonome)
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 535 -( F, = 0
- on applique à la manivelle (1) un torseur H Tl 1 : i ->( Mi(0) = MiY*p
{ Î2 = F2 XO- on applique à la coulisse (2) un torseur L T2 J : \ ->
( M2(02) = 0
on demande de trouver l'équation du mouvement sachant que les liaisons sontparfaites.
a) Equation de liaison
Pour repérer le mouvement on emploie les paramètres x et 9 • Maisils ne sont pas indépendants. Nous avons vu qu'ils étaient liés par la rela-tion : / A N
. ces (9 - a) =cos a
Elle est de type holonome.
b) Equation du mouvement en se ramenant à un paramètre
a) §SêïSÎË-£iS§£i3HË
T° - TX + T2
T° = 1 I '2 + ~M x12
II désignant le moment d'inertie de (Sj) par rapport à O,ZQ etM la masse de (82).
D'après (1) x' =-r sin(9 " a) 6'r cos a
T° = ifl! +.Mr2 (Sln(e " a)2) 1 9'22 L cosa J
$)• EHÎSËêS£ê«YÎl£HêllëLes liaisons étant parfaites et la transformation compatible, la
puissance virtuelle est la puissance virtuelle des seules actions données
6fi* = -MiCOi)^* + F2 . Vl*(02)
(comoment des torseurs forces et vitesses)
(}p* = M! e'* + F2 x'**S
xf = - r —- 6f* dans une transformation compatiblecos a r
(ffî* = L - F2 8 i n^- a> 1 6- de la forme
*^J L— cos ut I
6p* - % e >*1uS
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
- 536 -
Y) l§u§£î23i-£ê_M§Mîï£lIl y a un paramètre indépendant : 6
d_ 3T .21 - n*dt 90' " 96 = 0
HT - . [ l + Md£lT s in 2 (e -a>] 6'
t o ~~i 9I + M r
2 sin2(9-a) 6" + 2 M ry sin(6-a) cos(6-a)ej
cosza J cos^ao
II « M—£_ sin(e-a) cos(6-a).ef230 cos^a v
d'où l'équation
fî, + M —4- sin2(e-a)]0f! + M —^r sin(0-a)cos(e-a)6'2 - Mx - F2 Sln(9~a)L cos a J cosza x z cosa
c) Equation de LAGRANGE en conservant deux paramètres et en prenant unetransformation virtuelle compatible
Les vitesses compatibles sont définies par
*.».+ r s (6-a) ,* = Q
cosa
La puissance virtuelle est <7M* = Mx 6'* + F2 x'*
L'énergie cinétique est T° = T C1!6'2 + M X>21
On peut donc écrire les équations de LAGRANGE en employant la méthode desmultiplicateurs
d 31 9T _ sin(e-a)dt 39' 36 ~ l cosa
d 3T 3T _ ,dt 3P" ~ "3l ~ F2 .
|Iie- . M^Xr^i (1)
\ Mxff = F2 + X (2)
De l'équation de liaison, nous tirons
x1 - - r sin(e"a) 0'cos a
x" « - r siti(0~a) 0fl _ r cos(0-a) Qt2cosa cosa
d.o»de<2) * - -,rli| !L,..Hr£atoL,.2
En portant en (1)
! e.. = MI - M -4- 8in*<e-a)B» - M r^ sin(6-a) .cosa 21 i cos/a cos^a- F, r
sin(Q-a)z cosa
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 537 -
soit
fi .+ JËfU sin2(0-a)~]e" + Jfi£- sin(e-a)cos(0-a)6'2 = Mx - F2 r sin(9"a)
L1 cosza _J cosza x z cosa
C'est bien l'équation déjà trouvée»
d) Equation du mouvement en employant une transformation virtuelle incom-patible
Nous allons cette fois employer une transformation incompatible nerespectant pas la liaison entre (Si) et (82)
a) £âl£ïïI«£lSLï
T° - I [j 6'2. + M x'2]
6) -calcul^deÎL.r ç <#Uf 12 : puissance virtuelle développées par les actions de contact (S1)/(S2)
fl : puissance virtuelle développée par le torseur [TJ]
2 : puissance virtuelle développée par le torseur Qr£]
gr - «'e"ï - F2*"«
C 12 cette fois n'est pas nul
^Î2= F12.^»(M)
•4. ["Xi ^ |~X cosa"Posons FI2 = 0 FI2 = X sina
L o J B» L o J _RO Ro
2*(M) = t|*(M)' - Î*(M)
°*(M) = flj* A 075 = 6'* Î! A r Xj
f-r 6'* sin6 ~%*(M) = r 6:'* Y! = r 6'* cos9L o JRo
VI* = x'*X0
fx?* + r9'* sin6~V2*(M) = -ref* cos6
L • -0
Ôf 12 ~ X cosa(x'* + r 6'* sin6) - X sina.r6'* cosô
^ * = (Mi + X r sin6 cosa - X r sina cos6) 6'* + (X cosa + F2)x'*
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 538 -
y) é^uations^du^mouyement
d__ 3T 9Tdt ïiF 30 " 4e
d_ 3T • _ il - Qdt 3x' " 3x ~" ^x
I 6 f l = MI + X r sin(e-ot) (1)
M x f l = F2 + X cos a (2)
on a en outre l1équation de liaison
cos(6-a)x = r i ï.
cosa
x" = - r si-n(e-a) Q l l _ ^ cos(e-a) e f 2cosot cosa
en portant en (2)
X = - F2 + M x»cosot cosa
J .. -JËL. - M r Sin(ra) 6 " - M r C°s(^a) e*cosa cos^a cosza
en portant en (1)
I 0" - Mi - Fo r sin(0"a)^ M r2 sin2(g^I - M r2 sin(e~a)c°s(e~a) 9 «21 z cosa cosza cosza
c'est l'équation déjà trouvée
Remorque : lorsqu'on employait les équations de LAGRANGE avec multiplicateurson avait l'équation
M x" = F£ + -X
on a immédiatement X = X cos a
Le multiplicateur X est donc la projection de F^ sur 0 •
D. Signification générale des multiplicateurs
Nous avons déjà vu que les multiplicateurs s'interprétaient pourles exemples étudiés comme des actions mécaniques de liaison. Cette signifi-cation est gêné-raie.
Comparons les équations obtenues dans une transformation virtuellequelconque à celles obtenues dans une transformation virtuelle compatibleavec les liaisons telles qu'elles existent à l'instant t :
J £N m Ç\ rp
TT —r " " — = Qi transformation quelconquedt 9q.[ Bq^ *-
A Si T1 ^ T1 M ^— -—j— T—-• = Q. + ^ Xj Xji transformation compatible
i i x j=j
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 539 -
mOn constate immédiatement que l Aj a^ est homogène à une force généralisée.Pour préciser, supposons j-1par exemple que l'on ait un système de solides parfaits à liaisons parfaites.
# *<*i = QiD
mn. = flk + Y . A i ou;vi yiD > J J1
mais Q£ = Q£D + Qic + Q Le) + Qi(Li)
Q. m o (on respecte l'état solide)" ^Q. = ,Q. (on peut toujours faire ce choix)
mdonc Q.(Le) + Q.(Li) = l Xj aji
1 j-1m
Autrement dit l Aj ctj£ représente le coefficient de la puissance virtuelledéveloppée j=lpar les actions de liaison -même parfaites- dans une transformation virtuelleincompatible. On peut donc appeler ce terme action de liaison gênéTolisée.
E. Précision sur 1'origine de l'irréductibilité (lorsque l'on a affaireà des liaisons non holonomes)
Nous avons déjà longuement insisté sur la nécessité qu'il y avaitde conserver tous les paramètres nécessaires à exprimer les coordonnées detous les points du système. Nous allons approfondir maintenant la cause pro-fonde de cette obligation.
1. Exemple
Nous allons montrer d'abord sur un exemple que l'on peut êtreamené, si l'on ne respecte pas les conditions, à commettre de graves erreurs.
Reprenons l'exemple de l'essieu muni de deux roues identiquesdont l'une roule sans glisser sur le sol
T° = T. [tel + 2m2 + m)V2 + (mj + 2m2 + m)y l 2 + tejj- + jm2a2)^'2
a 9 a P I+ m2 ~ $2 + m2 ~ 4>3 I
on a les relations de liaison x1 - a<i|;f •*• (f>i)sin^ = 0
y' + a(i(;' + fà)co8ty = 0
^Dans la transformation compatible on a Q^ = 0
Des équations de liaison on tire x'2 + y'2 = a2(ip' +-<(>^)2
T° peut donc s'exprimer sous la forme
T" = | £œi + 2m2 +m)a2(^' + 2 ÎSlâi + | m2a
2)*'2 + - *'2 J
T° s'exprime maintenant en fonction de ij; ', '4>2, 4*3*
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 540 -
Mais ce serait une très grave erreur que de se servir de cette forme pourécrire les équations de LAGRANGE^ c'est à dire pour calculer
A d 3T 3Ti " dt Bq{ " 3qi
Cela provient du fait que pour exprimer les coordonnées d'un point de sys-tème il faut au moins 5 paramètres x, y, \f/, <K , <|> . Il nfest pas possiblede les exprimer avec 3 seulement. 2
2. Théorie de lfinëductibilité
Soit un système à n paramètres liés par des relations du typenon holonome (nous faisons cette restriction pour montrer la spécificité deces liaisons). S'il y avait des liaisons holonomes, on supposera qu'ellesont déjà été utilisées pour se ramener à n paramètres. Les relations de liai-son sont donc de la forme
{ajl qi + ... + aji qi + ... + ajnq^ •- bj } j = 1 ... 1
Ces relations n'étant pas intêgrables. Ce sont des relations linéaires entreles vitesses q|. On peut facilement exprimer certaines vitesses (en nombre 1)en fonction des autres. Mais nous allons montrer que si l'on fait cette réduc-tion on ne peut plus calculer les A^ par la formule
d_3T_ 3TAi = dt 3qi " 8qi
a) ex£ression_djB_l_vitesses_2i._e^^
Décidons par exemple d'exprimer les 1 dernières q£ en fonction desn-1 premières (ordre conventionnel). Posons pour abréger n-1 = k. On peut doncclasser les vitesses de la façon suivante :
11 qn-l • Cl+1 qn
°u qi qk ' qk+l <
les équations de liaison peuvent s'écrire
o.iiql • * • • • • +aiiqi * ••• +otikqk + ai,k+iik+i + • • • + aisqs + - • • +amqA • bi
apqi + ... +ajiq{ + ... +ajkq^ + <*j)k+1q£+I •+ ... + ajsq^ + ... +ajnqn = bj
aiiql + ... +aiiqi + .... +aikqk + al,k+l1k+l- + • • • + "Is^s + • • • • +alnqA = bi
ka l ,k+ lqk+l + •" + a ls qs + • ' • +alnq; = bl - J, aliqi
k "a j , k+ i qk + i + • • • + ajS
q;+ • • • • + vq; = bj • j, ajiqîk
°l,k+lqk+l + '•• + alSqs + ••' + alnqn = bl ~ J, aliql
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 541 -
ce qui peut s'écrire sous forme matricielle
' , - - j- ___ '- . *
a . . . . . . a, ... a, a,' _ , v ,l ,k+l 1s In Mk+l b - 2. a .q!i«l . L
'. * kaj,k+l -°i. - " « j n qs = bj * £ «j'i^i
•
* * k
_«l,k+l '" a*ls • ' • "înJL^ J Lb'l " J, aliqi_
la matrice qui figure au premier membre est une matrice à 1 lignes et 1colonnes. Désignons par 3 .les éléments de son inverse
"<k+il Pu *ij ;B i rpb i - j, aiiqî"
kq f » g - ...• B . ...- -p r. -b. - 7 a..q!s sl SJ sl J ^j J1 i
k
< J L611 • • ' • Blj "• 6liJLbm " J, amiqi
sous forme indicielle nous avons donc
qi = j.Vj - j, j, Vjii .-1*1 ...»formule que l'on peut écrire avec la convention de l'indice muet
qs = gsjbj • Bljaji qî ou encore
qs = ôs + ôsi qî s =k+1 ••• n
en posant6 = f l . b . 6 . « - B • a-•s psj j si psj ji
Note : le 6 . n'a rien à voir ici avec le symbole de Kroneckers i
Remarque : les vitesses compatibles vérifient qf* = 6- . q.f*
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 542 -
Exemple : sphère qui roule sans glisser sur un plan.
Les relations de liaison sont :
x1 costp + y f sinij/ + a c|> f sin6 = 0
-xf sinij> + y f cosijj + a 0 1 = 0
i _ -a <() f sin0 sin ty , cosijr —a < f > f sin0x " -a 0 f cos i|> y " -sin^ -a 0 f
x f = a 0' sinijj - a <j> ! sin0 cosij;
yt = -a 0 f cosip - a t))1 sin0 sini);
^ ) Ê5EïêËËÎ2S-âÊ«lâ-YiJËÊËËÊ-Yl?l-SS-l2S££Î2S-ÉË-3l-jL^^-Sv
tw\V;";^s*;rfcS .^+ â^\+l + - - + â^^ + • • • + ^ + ^t
«: = 6s + 6si qiv<p) .- Ç^— ît^*-*^*!!
+ 3ÊT ( a k + i + ôk+i,iqP + •- +ïr ( 6 s + 6s^î > + -K. " 1 S
â$+ 1 - (6 + 6 .q!)3q v n ninin
î(p) • iràî ,, *-*i:«.I*- + :«M)s i
^Hr^^M---!;^*--!!;^^
^^^v,.^-^'.**-^^'^. Tv
. . 3P . 3P s . J . 3 P , , ; , j . 8 ^ .+ âr + â^7ôk+i * . • • • +^;^ + •- +^vôn
soit encore
V(P) = a! .q{ + ... + !£q[ + ... '+ a + 1
La vitesse virtuelle la plus générale compatible serait
•*•* •*• * -*• i* -*• i*V (P) - aiqi + ... + a£q1* + ... + a *
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 543 -
c) £êl£Hl«ïî!LlâJ2HΧËâS£êJZΣ£HêI^ration
J$>* = | Jg(P) t*(P) dm
P6S
Q r* . qj* { 5g(P).a1 dm + ... + ql* I 3g(P) a£ dm + q * [ 58(P) .aR dm '' •
*^J P6S pes pes
J& * - Aiqi* + ... -H Aiqj* + ... -f Akq^ avec A£ - J J^p^dm
pes
d) impossibilité d'utiliser les formules de LAGRANGE pour calculer les A.——*-——"-——————.————————~~—-.———-.«.——._-. «.MMMM_MM«. _. —.—«.—*.——.-.«.-»».^»^»—^^•—«.^
- avec la réduction les A. s'écrivent jusqu'ici
A£ -- j J8^),^ dm (0
P6S
- en conservant tous les paramètres on avait
Ai = I Î8<p)-!f:dm ™pes ^
C'est cette dernière expression que nous avions transformée pouraboutir aux formules de LAGRANGE. Mais nous allons voir que nous ne pouvonspas transformer en général (1)
Posons J8(P) « J ; Vg(P) = V
-> •> dV -> d ,-± -+ ^ -± dafJ'ai = dt • ai = dt ^v-fti> ~ v' ar1
. Transformation du premier terme
D'après la formule donnant V a. = —ri 3q.
Sr<*-V -**•$
l«^)-|tiHîla transformation est donc possible comme précédemment
. Par contre on ne peut transformer le second terme en remplaçanttr da: tr 8VV. -7T1" par V . 5—dt K aqi
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 544 -
r, -, -, 3*V da,-Calculons T et -rr1"3qi dt
ÏV 3"ai t . A a~aj_ , 3~ak f 3!FÎT - 4«>' + • • • + ;ritqj + • • • + 3^q^â^Tmais ê- IH IÎH *-*&«*£•(seuls k paramètres interviennent)
rs deux expressions sont différentes, sauf s'il existe une= F(qi ... qj_ ... qfc,t) telle que
* UL ^ = H.ai = 3qi ; a 3t
s'il en est ainsi, on a
3 aj _ 3 3F _ 32F3qi " 3q£ 3qj " 3qi 3qj
3ai m _3_âL = 92F3qj " 3qj 3q£ "" 3qj 3q£
-> ->• 'D'après le théorème de SCHWARZ ' ~i' = 13qi 3qj
de même 3^ _ j_ St 9t 9cli ^ +3a _ 3 3$ d'où |Si - |£-35; = si 8t aqi
Donc s'il existait F la transformation pourrait se faire. Voyons quelleest la conséquence
V(P) = aiqj +...•*• a£q[ •<-... akq^ H- a
'8(p)- gr'i*-*gr«i*-*i^t*w—->. g
on aurait donc Vg(P) = ~ mais V8(P) = - r ÔPdt dt
en intégrant OP = F(qi ... q£ ... q^, t) + cte
Autrement dit, les coordonnées de tout point P s'exprimeraient en fonctionde k paramètres seulement. Or ceci est contraire à l'hypothèse : il y a desliaisons non holonomes entre n paramètres.
Par suite, la transformation ne peut réussir s'il y a des liaisonsnon holonomes, et l'on ne peut pas calculer A^ à partir de Tg réduit à kvitesses,
F. Intégrales premières
On recherchera les intégrales premières linéaires et quadratiquesdans les mêmes conditions qu'au paragraphe correspondant des systèmes à pa-ramètre s indépendant s.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

-545-
7.1.9 UTILISATION DES EQUATIONS DE LAGRANGE POUR DETERMINER LES INCONNUES DYNAMIQUES(ACTIONS DE LIAISON)
Jusqu'ici nous avons essentiellement montré que les équations deLAGRANGE pouvaient conduire très rapidement aux équations différentiellesdu mouvement.
L'interprétation des multiplicateurs et l'utilisation de trans-formations virtuelles incompatibles nous ont montré que l'on pouvait aussifaire apparaître les actions de liaison. Nous allons maintenant voir com-ment on peut facilement faire apparaître une action que l'on veut calculer.Du point de vue de la théorie les équations de LAGRANGE offrent les mêmespossibilités que les théorèmes généraux.
Pour faire apparaître une action de liaison ou une action inté-rieure il suffit de prendre une transformation virtuelle incompatible oud'utiliser des transformations compatibles avec multiplicateur.
A/Exemple de détermination de liaisons
Détermination des actions de liaison dans le cas d'unpendule simple.
figure 1
Nous pouvons repérer le pendule (Si) de la façon suivante
Pour repérer le pendule on peutprendre un paramètre 6 ou 3 para-mètres x, z, 0 tels que
OÔt = (x, 0, z)R
e = (z0, Zj)ces trois paramètres étant liés parles relations
x = 0 (1) , 1y = 0 (2) holonomes
Avec ces trois paramètres nous pou-vons facilement prendre des transfor-mations virtuelles incompatibles(elles sont simplement assujetties àrespecter en mouvement plan)
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 546 -
1. Analyse des actions mécaniques. Puissance virtuelle dans unetransformation virtuelle incompatible
Puissance virtuelle développée par le poids
P = M g Z0
x + 1 sin0oS « o
z + 1 cos0 „*- -JK0
xf* + i e1* cose
°*(G) = 0zf* - 1 el¥ sine _Ko
(jp^ = m g (z'* - 1 6'* sine)
Puissance virtuelle développée par le torseur des actionsde (S0)/(Si)
[TOI] : FOI = [x, o, Z]RQ M O I ( O I ) = .[L, o, N J R
. f x f *1 _^ f ov°* - o nî* : ' - e f *01 L2"JKo L o J
/*fj*H -+ ->ft* •> -*-*itc
*£) 1 - FOI • V°(0i) + MOI (Oi) . "î*
^P* = X x'* + Z z'*
d'où finalement la puissance virtuelle totale
(ffî* = X x1* + (m g + Z)zf1|r - m g 1 sine 6'*
2. Calcul de l'énergie cinétique
T° = îm(^>2 Tx'.ie'cosen
^ = ozf - 1 e' sine _Ko
T° = Y m (xl2 + zf2 + l2 ef2 + 21 xf e1 cose - 21 z1 ef sine)
3« Equation du mouvement
d_ 3T _ _9Tdt 3xr Bx x
d_ 3T _ il ,, Qz d_ 9T _ 3dt 3zf Bz dt "3?1" 3e "" 4e
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 547 -
*<à?x) : fi1" = m x' + m 1 6' cps6j Si*P
4r~~-r = m x" + m 1 8ff cosQ - m l 8l2 sin0dt Bx
H- = oBx
m x" + m 1 0" cos0 - m 1 0'2 sin6 = X
f £} 3T*o£(z) : T-T = m z' - m 1 0' sin6
£. IL- = m z" - m 1 0" sin0 - m 1 0f2 cos0dt 9z
m z" - m 19" sin0 - m 1 0f2 cos0 = m g + Z
+ &L(Q) : TTT = m 1 xf cos0 - m l zf sin0 + m l2 0fv^s» do
J r\ m
TT TST = ml x" cos0 - ml 0f xf sin0 - ml z" sin0dt du- ml zf 0f cos0 -f ml2 0"
3Ti. = - ml xf 0' sin0 - ml zf 9f cos0
m l2 0lf + m 1 xff cos0 -.ml z" sin0 = - m g 1 sin0
4, Détermination des actions de contact
Nous avons les équations de LAGRANGE
m xlf + m 1 0" cos0- - m 1 0l2 sin0 « X (1)
m z11 - m 1 0" sin0 - m 1 0l2 cos0 = Z + m g (2)
m l2 9" + m 1 x" cos0 - m 1 z" sin0 « - m g 1 sin0 (3)
auxquelles s'ajoutent les équations de liaison x = 0 (4)z = 0 (5)x" = 0zff = 0
Les équations deviennent
m 1 0" cos0 - m'1 0f2 sin0 = X (l)f
- m 1 9" sin0 - m 1 0f2 cos0 = z + m g (2)f
m l2 0ff « - m g 1 sin0 (3) T
La troisième équation est l'équation classique du pendule
0" + £ sin0 « 0 (3) f
L'équation du mouvement étant résolue on aura X et Z en portant 0 calculéd'après (3)' dans (1)' et (2)'.
Mais en fait il n'est pas nécessaire ici de connaître 0 = 0(t)pour connaître de façon convenable X et Z. A partir de (3)' on a une inté-grale première en multipliant par 0' et intégrant
0" 01 -H -6 Sin0 0' = 06'2 g ' ' "— y cos0 = cte
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 548 -
Cette constante se détermine par les conditions initiales
t « 0 e = 00ef = eô0'2 = - ei2 + 2 -§• (cos0 - cos60)
D'autre part nous avons 6" = - •& sin0 d!où
X = - m g sin6 cos0 - m l sinejjBj2 + 2 & (cos0 - cos0Q>]
Z = - m g - m g sin20 - m l cos0[eo'2 + 2-1- (cosè - cos0o)]
X et Z sont connus en fonction de 0 et c'est en général suffisant.
5* Remarque :
On aurait pu également utiliser la théorie des multiplicateurs.Prenons toujours 3 paramètres x, z, 0.
T - Y m [x'2 + y'2 + l2 0'2 + 21 x' 0' cos0 - 21 z' 0' sine].
Les équations de liaison sont x = 0z - 0
La puissance virtuelle développée par le poids est comme précédemment
)* = m g (z'* - 1 sine 6'*)
Mais la puissance virtuelle développée par les actions de liaison est nulledans une transformation virtuelle compatible, c'est à dire pour des vitessesvirtuelles vérifiant .* ^ .
xf* = 0 AIz'* = 0 X2
Les équations de LAGRANGE s'écrivent avec multiplicateur
d ST 3Tdt "5F" " H " AI
d 9T 3T .' dt "a '" 3l = m g * *2
d 3T 3T . . n\ dt Wr" W = " m 8 1 *«*
on constate, comme les premiers membres sont les mêmes que précédemment que
X = \iZ = \2
B. Détermination des actions intérieures à un solideOn prend alors une transformation virtuelle incompatible avec
l'état solide.
Déterminons par exemple la tension dans un pendule simple.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

Par une coupure à la distanceR nous pouvons diviser le solideS en deux solides (S ) et (S2)•Pour repérer le système on peutprendre
0 = (Z0, îj)
p tel que OG = P Zi
Pour exprimer que (82) et (Si)forment un solide S on a la liai-son p = 1
1. Analyse des actions mécaniques. Puissance virtuelle.
- La transformation virtuelle nfétant pas compatible avecl'état solide, la puissance virtuelle développée par le torseur des forcesde cohésion au contact de (S]_) et (S2) n'est pas nulle.
T12 { 12 " F12 1 ^12(pl) = ° C11 s'agit d'un fil)
en outre F2i + FI2 = 0
é?T2 = I12 (p2)* + i21^(pl)*V°*(P2) = p'* Î! + pë* Xx
°*(P!) - R e'* Xi
Ï2 - P'*F12
- Puissance virtuelle développée par le poids
P = m g Z0
FP sine"ôS » o
^P cose JRo
Fpf* sine + p e'* cose "V°*(G) = 0
p1* cose - p ef* sine nKO
Gp*ç = m - g ( p f * cose r P e'* sine)
/j/U ' - ~ m g p sine e'* + (m g cose + F12) p '*
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 550 -
2. Energie cinétique
T" = 1 m (V°)2
v° (G) = P ' "zi + P e ' liT« = ^m (p'2 + p2 g.2)
3. Equation du mouvement
d 9T _ 3T ,dt 30f .36 0
d_ 3T 21dt 30f " 3p ~ %
m p2 eff = - m g p sin6
m p" - m p e'2 = m g cosô + F12
4. Détermination de la tension F]?
Outre les deux équations précédentes, nous avons l'équation de liaison p = 1La première équation est l'équation du mouvement du pendule :
0" + & sin0 = 0
La seconde donne FI2 = - m 1 ef2 - m g cose
et e'2 peut être connu soit en fonction du temps, soit en fonction de 6
5. Remarque
La théorie des multiplicateurs nous conduit au même résultat. Conservonsdeux paramètres e et p avec la liaison p = 1
- L'énergie cinétique est la même
T - im (p'2 + p2 e'2)
- La puissance virtuelle développée par le poids est toujours :
(y/3*v = m g (pf* cose - p ef* sine)c-/
- Par contre la puissance virtuelle développée par les actionsde cohésion est nulle dans une transformation virtuelle compatible, c'est àdire pour des vitesses virtuelles vérifiant
pf* « 0 A
- Les équations de LAGRANGE s'écrivent donc avec un multipli-cateur X
d 3T 3TIF^-ïê = ~ m g p sine
d 3T 3T ft A .dT^""^ = mgcos6 + X
X est la tension F 2
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

2ÈME P A R T I E
E Q U A T I O N S D ' A P P E L
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 551 -
Lors de lfétablissement des équations de LAGRANGE, nous avonsutilisé l'énergie cinétique T& pour calculer les coefficients A^ de lapuissance virtuelle développée par les quantités d'accélération
d_-»T _ 3TAi = dt ÏÏqJ ~ 3q£
Ceci avait pour conséquence la nécessité d'écrire T avec tousles paramètres nécessaires à l'expression de la configuration du système.Alors les systèmes à liaisons non holonomes avaient du recevoir un trai-tement particulier. Nous allons montrer que l'on peut calculer les A£ nonseulement à partir de , ;
Tg = 1 j [fe(P)]2 dm
mais aussi à partir de l'expression P6S
S8 = 1 J pg(P)]2 dm
P6SNous obtiendrons alors les équations d'Appel qui donnent les
mêmes relations que les équations de LAGRANGE, mais qui permettent enoutre de traiter tous les problèmes de façon uniforme.
7.2.1 ENERGIE D'ACCELERATION
A. Définition
Soit Jg(P) l'accélération du point Pdans le repère Rg
On appelle énergie d'accélération dupoint matériel P affecté de l'élément demasse dm le scalaire
dS - j p8(P>P dm
On appelle énergie d'accélération dusystème
Se - I J p8(P)]2 dm
pesB. Théorème de Koenig pour l'énergie d'accélération
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 552 -
Soit le repère (R|) : [G, x|, Y*, ÎJ] tel que
S = iY"* = ?Yg Yg-*-w- ->•7* = 7g g
G étant le centre dfinertie-dû système (S). Le Rg est en translation parrapport à Rg. Donc ^
oj. - oAppliquons le théorème de composition d'accélération
J8(P) = Jg*(P) + J8+(P) + 2 fls+ A
g*(P)O O
mais JJL(P) " îg(G) donc finalement
3g(P) = ?g*(P) + J8(G)
P8(P)]2 = P8*(P)12 -H (1g)2 + 2 g¥(P).îg(G)
L'énergie d'accélération s'écrit donc
SS =^ JpS*(P)]âm+ (3«)2 | dm+.2Ϋ(G)..| îgV)dm
• P6S pes pes
mais J8*(P) dm - m JgW(G) = 0
P6S
Donc finalement en désignant par M la masse du système
sg = sg* + IM (î«)2
Théorème de KOENIG :
L'énergie d'accélération est égale à l'énergie d'accélérationdans le mouvement autour du centre d'inertie augmentée de l'énergie d'accé-lération du centre d'inertie affecté de la masse totale.
Ce théorème est tout à fait comparable au théorème correspondantsur l'énergie cinétique.
C. Energie d'accélération d'un solide ayant un point fixe
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 553 -
j vg(os) = o°s fixe dans (Rg> —+ j Jg(0s) = 0
La formule fondamentale reliant l'accélération de deux pointsd'un même solide s'écrit :
Jg(P) = Jg(0s) + || Ûg A ÔTp + ftg A (3g A Ô^P) d'où
P8(P)]2 - (|| 3f A Ô^)2 + p| A (ft| A Ô^)P +. 2 <|Î2| A Ô^).^A(^AÔ^)]
Sg - j Pî A (]Ç A Ô^O^dm + i | (g iÇ A ô?)2 dm
pes pes
| pj A (SJ A ô?)>(|| nf A V> dm
pes
Posons E! = 4- [p8 A (Q8 A CUP)]2 dm^ j s sP€S
^ - ? | < f s f A ^ > 2 d mpes
I r-^-rf -+-0 y *-> HK ->a >E3 - J [flf A (fi8 A 08p-)>(~ fi8 A 0SP) dm
P€S
1. Calcul de EI
On sait que : (a A b) . (c A d) = (a c) (b d) - (a d) (b c)
g8 A (S« A ÏÏ^)12 = (fi8)2, (fi8 A Ô^)2
s s s s
car «g.(fig A ÔS~P) - 0
E! = 1 (fig)2 f (fig A Ô^P)2 dm£- S J S
pes
Cette dernière intégrale a été calculée lors du calcul de l'énergie ciné-tique d'un solide ayant un point fixe
T = I | JTg(P)p dm - 1 j (fif A ô )2 dm
pes pes
f(^A5-?)^dm = ÏÇ^Sî-
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 554 -
El = I (5J)2 p| Ï0 3pS
2. Calcul de E9
E* • i [(jf3!" 2"»'pes
L'intégrale est en tou£ point comparable à celle qui a été calculée, Œsremplaçant simplement iï&
s
«* - H i-V 3. Calcul de E3
E3 - f <It^AÔ^) . [S* A ( AÔ )] dm
?esDans un premier temps montrons qu'on ne change pas la valeur de cette ex-
• d *^o "" 2 ' * pression en permuttant -jr iï& et Q A 0SP. Pour cela calculons les deux. dt s sexpressions
xi • &"!Aô?> • PÏA <S;A v>:X2 = Qnf A Ô?) A 0^1 . (fij A | flf )
xi = (^ of .af ). [Ô^P . (nf A ô^)] - [ nf . (aJ A ^p)] (ô^ .nf )
Le premier terme est nul
*i - -Ht«î^AS?>]-.<^^>X2 = D Aô3). [p?.||?Çl -Q A ). ^ (Ô3.îf)
Le premier terme de cette expression est nul
x* - - [iF f • <? A ô?>] • (5? '
X2 = K! d'où
on peut donc écrire une nouvelle expression pour E3
f £
E3 = [(g A CLP) A <Tp] «[ g A 1- ê] dmJ s ^ s dt spes
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 555 -
E3 = (fif A.'|| n|) | (^ A C£P) A Ô^P dm
pes
E3 - • fàf A |j- flf) | Ôj A (Sf A Ôp) dm
pes
mais P8(0S) = j C£P A vê(P) dm
pes
pg(0s) = Jôgt A ' ( n J AÔ?) dm = "os-"î
pes
*3 - - « S Ï A ^ - V 3 ?
4. Finalement l'énergie d'accélération d'un solide ayant un point
fixe est :
°* • {tff>2<^ "Os «? 4 £ v. \ £ %* 4 «î « «•) ï0. sf
L'énergie d'accélération est beaucoup plus longue à calculer quel'énergie cinétique.
D. Théorème de Koenig pour le solide
Se « S8* + i-M [J8(G)]2 Dans R* le point G est fixe*• JJ
.«• -1 «a»-) "o T' 4 £ v ~e %+«£ sr A sr> f<= c
La formule de composition des vecteurs rotation entraine
«î - «r * «î.îf - îf
lia formule fondamentale de la dérivation vectorielle donne
£ » 4 2» +'«8A-tJ8»dt s dt s s s
dg £g dg -^g Finalementdt "s = dt~ s
S8 = 1 (Që)2(Që I Og<> + 1 ^ï Og ï ^ï O8 + (— Og A î Og + -Ui CJ8^b 2 Ws; Wg IG Sg; + 2 dt "s iG dt "s Mt "s A "S
; XG "s T1 CV
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
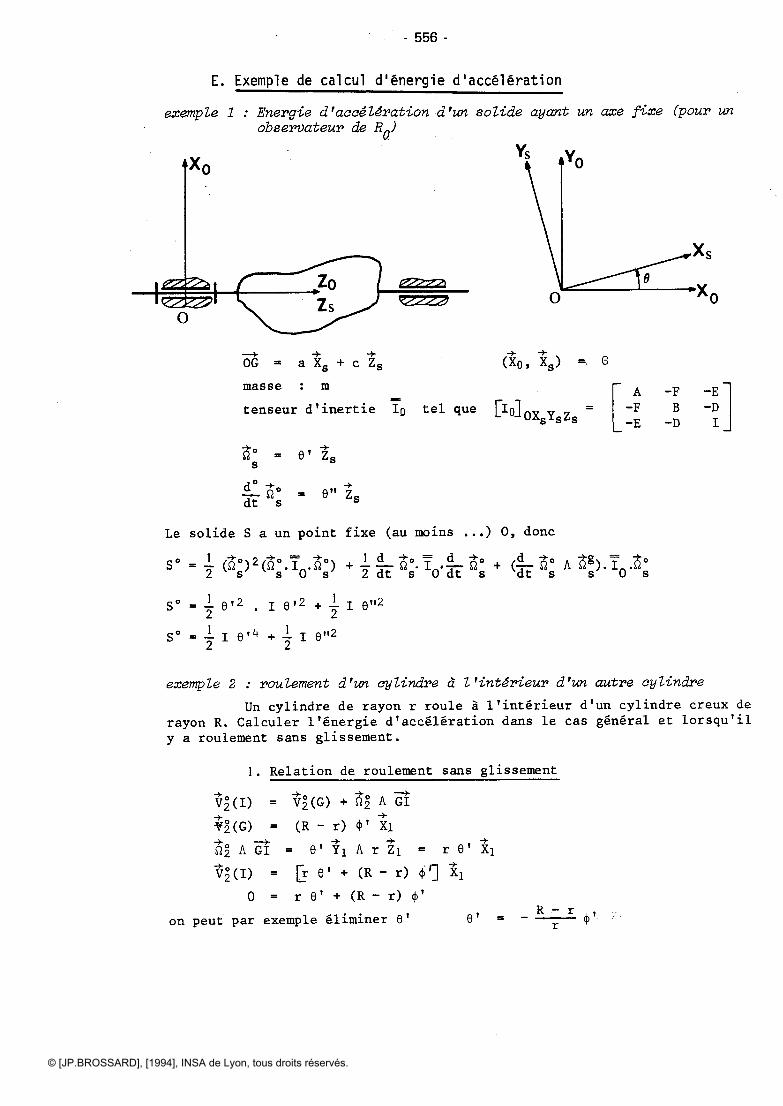
ÔG « a Xs + c Zs (X0, Xs) ». 0
masse : m r * „ „ ~
tenseur d'inertie IQ tel que flolnv v •? = "F B ~"DOXSYSZS ^_E _D j^
fi* = 0 f Zs
ll£° = 0" zsdt s s
Le solide S a un point fixe (au moins ...) 0, donc
s° = I ro°v2ro0 T Q°Ï + 1 — "0° ? . f L f t 0 - * r— ^° A Qg} T Î70b 2 cng; (ns.i0-ns; + - 2 dt ng-10-^ 88 *. ldt "B A WSMO-.WS
S° = 1 0'2 . I 0'2 - f | l 0"2
s° . I i e f l f + -j i 0 f f 2
exemple 2 : roulement d'un cylindre à l'intérieur d'un autre cylindre
Un cylindre de rayon r roule à l'intérieur d'un cylindre creux derayon R. Calculer l'énergie d'accélération dans le cas général et lorsqu'ily a roulement sans glissement.
1. Relation de roulement sans glissement
V2(D = V£(G) + 2 A GI
%(G) = (R - r) <f>' Xi
2 A GI = 0 ' YI A r Zi = r 0 ' Xi
V (I) - jj 0' + (R - r) j*] Xx
0 - r 0' + (R - r) 4>f
R — ron peut par exemple éliminer 0' 0' = j— <j> T A
- 556 -
E. Exemple de calcul d'énergie d'accélération
exemple 1 : Energie d'accélération d'un solide ayant un axe fixe (pour unobservateur de RJ
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

2. Energie dAccélération dans le cas général
S° = J ÏÏF'"2 *G ^ff + 7<"S>2 °2 ~G -flj +(~ fi| A n|) TG ft| + { ,m(J^)2
n| = e f Y0
— ^2 s '9" ^2 ^e dernier terme est nul
^-(3 r2 + h2) 02 0 0s° -1 [p,e",ol o m ~ o e"
0 0 jj(3 r2 + h2) 0
2^(3 r2 + h2) 0 2 0 l[~o]
+ 10'2 [0,0',qj o 2 i o e « + l m ( j ° ) 2
0 0 y_ (3 r2 + h2) 0
s° . iHlie»2 +12210"» + l i a . ( J j ) 2
ΰ(G) = (R - r) <fr" Xi - (R - r) *'2 Zi
S° . 1 JS|1 e»2 + 2|î e"* + m(R - r)2 *»2 * m(R - r)2 *"H
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 558 -
3. Energie d'accélération lorsqu'il y a roulement sans glissement
e' = -JLlJLcj,'
e« = - ILUL <j)»r
g0 =, I j^il^i f,2 + mri^r)! + m(R_r)2 ^,,2 + m(R_r)2
S° = l||m(R-r)2 +..2 + m(R_r)2 [lfpiî + ij <T4}
Exemple 3 : énergie d'accélération d'une sphère homogène roulant et glissantsur un plan fixe R^OJ^O!
= r A o o~Ir - 0 A 0
L° ° A,masse M
ÔG = x XQ + y YO + - a Z
Le repérage de l'orientation se fait à l'aide des angles d'Euler usuels : ty,e, <f>
Te 'on a immédiatement Û° = i(;' sin0
S i|;f COS0 + 4 ' _i~ __iK2
Ti o ond'autre part I0 = A 0 1 0
LO o iJRz
s° -1M ^>2 +1 $y [% TO 53 4 3; î0 - <£ A «;>ïo ^S° = 1 M (x"2 -H y"2) + 1 A (fip4 + 1 A (|1 fip2
(n°)2 = e'2 + i|»'2 sin2e + (ij;1 cose + < t > ' ) 2
.|l.î; - ^î; + ^ I A ^
H » - ^ re"~ n° = t" sine + 41' e 1 cosedt s i)»" cose - V e' sine + 4"R2
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 559 -
]~e' ~j pe f ~| rV <f>' sine"Œ0 A Î7° = ty1 sine A \|»' sin9 - - 6' < ( > '
2 S LTJJ' cosôj |_tp' cos6 + < f > ' J 1_0 JR
0 _^ Fe" + i|)' 4>' sine ~^-n° - t|>" sine + \|i' e1 cose - e' <t>'
. dt S L " cos6 ~ *' e> sine + +" JR
s° = I M (x"2 + y"2) + j A [ë|2 + '2 sin28 + .'(*' cos6 + «t»1)2!2
+ i A |(e" + jj;1 <t>' sin6)2 + (*" sin6 + 4.' 6' cos6 - 6' <))')2
•w ij)" cose - y ef sine + <f>")22
7.2.2 CALCUL DES COEFFICIENTS A-j DE LA PUISSANCE VIRTUELLE A PARTIR DE L'ENERGIED'ACCELERATION
Ai - ( 3»(P> . |L d»pes
" • Hr'»*-*^'**-*!;^3»(P, . a.,,*... ,!»... ,.*!!, -,
. ? a7? , Fl* .1, âqïât '1 * âzt
1=1 nl
, . .,. ^ ^ "aj • • apon a donc immédiatement T-TT = -r-—
9q£ Bq£
'A. u f^l^d,1 J 31Ï
pes
i f j* .Ai = 2 j 3 dm
pes
Ai.-.4M (3g)2dmpes
A- - 3S\1 3qY
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 560 -
Les coefficients A^ peuvent donc se calculer à partir de l'énergied'accélération. Le calcul semble apparemment plus simple, mais il faut remar-quer que le calcul de Sg est plus compliqué que celui de T&
Remarque : simplification du calcul de S destiné au calcul des A^, S réduit.
JS(P) . |Lqï t...,|Lqï |Lq;;. x
x étant un ensemble de termes ne contenant pas de qj
P8"*2 - jj.lrlr * -j,ii'" **2
Sg = S2 + BI + S0
S2, Slf SQ étant des termes de degré 2, 1, 0 en qV. Par suite pour calculerA£ on pourra utiliser la fonction
Sg • S8 - S0
Exemple 1 : solide ayant un point fixe58 - i£^o^ * £*.**!>*.*.
Exemple 2 : solide ayant un axe fixe (03 ~%Q)
s° = I i (e'4 + e"2)
s° - i i e"2
7.2.3 EQUATIONS D'APPEL LORSQUE LES PARAMETRES SONT INDEPENDANTS
L'équation de d'ALEMBERT s'écrit toujours
(Ai - Qi)qi* + ... + (A£ - Qi)q{* + . .. + ( - Qn)q * = 0
. 3SgAi = âq?
riSLes équations d'appel s'écrivent y-?T = QÎ ¥i = 1 . .. n
Exemple 1 : mouvement d'un point matériel soumis à une force centrale attrac-tive Newtonienne
On sait que la trajectoire est plane.La force est
ÎQ/P - fz-*l a > 0
ÔP = r K!
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
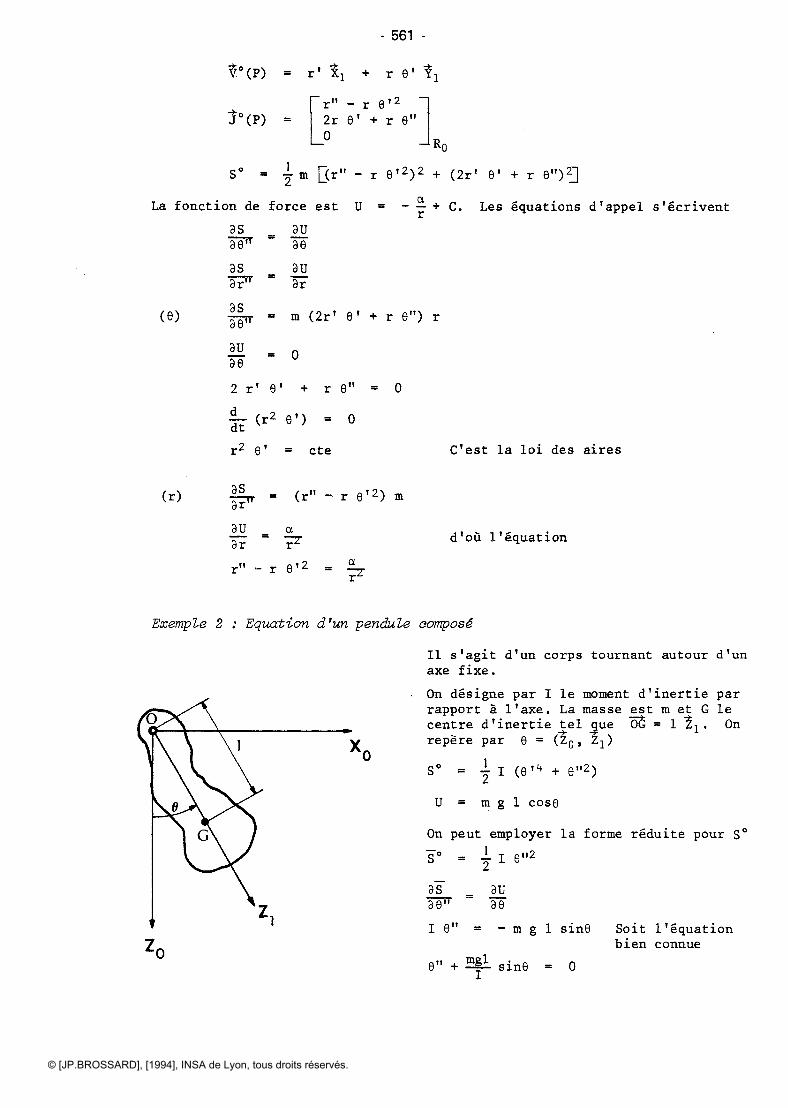
- 561 -
$°(P) = r1 $! + r 6' ^
PT" - r S'2 ~J°(P) = 2r 81 + r 0"
L° J%
S° - . 1-m [>" - r 0 '2)2 + (2r f 0' + r 011)2]
La fonction de force est U = + C. Les équations d'appel s'écrivent
as au30" = 36as _ £uJr* ~ 3rJ\C
(9) ||- = m (2r f 6' + r 6") rdO
1S = o39
2 r' 6' + r 6" « 0
fe(r2 e ') = o
r2 6' = cte C'est la loi des aires
(r) ||n- = (r" - r e'2) mà*-
3U a Jf ..._-r— = —7 d'où l'équationo r r
r" . r 6'2 =
Exempte 2 : Equation d'un pendule composé
II s'agit d'un corps tournant autour d'unaxe fixe.
- On désigne par I le moment d'inertie parrapport à l'axe. La masse est m et G lecentre d'inertie tel que OÊ - 1 " . Onrepère par 6 = (Z0, Zx)
S° = j I (0"+ + 0"2)
U = m g 1 cos0
On peut employer la forme réduite pour S°
S° - 1 I S112
3? = ^U30" 30
I 0 f f = - m g 1 sin0 Soit l'équationbien connue
e» + 2|L sine = o
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 562 -
Exemple S : Mouvement de LAGRANGE et POISSON
|~~A 0 0~|[ij = 0 A 0 OG = 1 Zs
LO o cJRs
s° - i tô; ?0 3p<3:>2
+ 7^'VZt^
+ <fL ^° A 5°) i a°d t s s o s
Le repérage est fait à l'aide desangles djEuler classiques. On saitque dans ces conditions on a
rv ift° = V sin0 U = - m g 1 cose + C
S l i 1 cos0 + < j > f _K2
Pour faire les calculs, nous allons utiliser le repère (Rs) car il nouspermettra un calcul formel plus rapide. Le repère (R£) peut commodément êtreutilisé aussi car la matrice d'inertie de Io est la même dans (Rs) ou dans(R2).
0 f cos<f> + ^ f sin0 sin(()On sait que Q° = - 6 f sin<|> + ^ f sin9 cos<()
s i^1 cos0 + (j>! Ds
->o (X)1
Posons tS7 = wz Pour le calcul de S° on peut utiliser la0)3 D forme réduiteKs
Pour le calcul de S° on peut utiliser la forme réduite
g» - » i l fr ï ilfr>- + ( i l ^ A ^ ) ï ^2 dt s o dt s dt s s o s
d° *o ds ^0 d° ^0 r ^ jTT ^ = TT " 1T ^ = ^i avecdt s dt s dt s f
L^URRs
o){ = 0" coscj) - 0 ! c ( ) f sincf) + ij/f sin0 sin<() + ^ ! 0 f cos0 sincj) + i j ; 1^ 1 sin0 cos<t>
o)^ = - 0 f f sincf) - 6 ! < t > f cos(j) + ip11 sin0 cos<j> -H i j ; 1 ©' cos0 cos<}) - ip 1 ^ 1 sin0 sincf)
o)^ = i|/! cos0 - ^ ! 0 f sin0 + (j) f f
do _^o _^o o)i 0)1 0)2 0)3 - 0)3 o)2-TT- ^° A £1° = o)2 A 0)2 = o)J o)i - o)j 0)3
L^a JR L^B L L^l ^2 "" wl wl RKs Rs Ks
donc
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

.- 563 -
S° « ~ (Ao)]2 + Bo)£2 + Co)32) + A(o>£ 0)3 - u)§ 0)2)0)1
+ B (0)3 0)1 - o)J 0)3)0)2
+ C(o)f 0)2 - co£ 0)1)0)3
S° - j (Ao)f2 4- Bo>22 + Co3$2) + A(o)£ 0)3 0)1 - toj 0)2 N I )
+ B(o)^ 0)1 0)2 ~ wf (1)2 ^3)
+ 'C(o)f 0)2 003 - 0)^ 0)1 0)3)
S° = 1 (Ao)f2 + Bo)^2 + Co)J2) - (C - A)(o>3 0)1 o)^)
- (A - B) (0)1 0)2 o)J)
- (B - C)(oj2 œ3 o)J)
S° « 1 [^)f2 -f Bo)^2 + Co)$2 - 2(A-B)o)i o)2 a)§ - 2(B-C)o)2 o)3 0)| - 2(OA)o)3 caj o)£J
Cette formule est toujours applicable. Dans notre cas particulier A = B et laformule se simplifie
§° « y {Âo){2 + Bo)^2 + Co>£2 - 2(A-C) 0)3 (o)2 o)i - 0)1 o)^)]
Les équations d'appel s'écrivent simplement
!L_ „ 32 . oa^ft 8ip3S i JHJ86" " ae
i^r = 12 . nâj^ 3<f>
Eguation d'ag£el A( )
3U A 3S° n-r-r » 0 donc -r-rrr = 0d<|) d(|)
as = ^as^^ao^ ii_^£i + as a^jac() f f aoj{ a(()ff 3^ a<j) t f swj a<j> f f
as 3a)j'ao)j a<()ff
i 9^é- c ^5 âF
mais o)^ = ip f f cos6 - ^ f 0 1 sinG -f (|)ff
HT - C Ï ÏF ( ^ ' ^e + *')
d'où l'intégrale première -i|;f cos0 •*• < f > f = cte = rg
lSHâ£Î22-S[Iâ£EÊl-éii[!l
u - « $• - »
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
- 564 -
9S° . , 9o)j _,_ . , 3ui ,, _N 3coi ' ,. „. 9to£^P = M + ^2 â# - <A-C)u>3 <*2 + <A-0<a3. «! - 7
o. f
•g-j-Jr = sine sin<(>
M = sin6 cos$
M - cos e
If • f-jjt f «1 - (A-0 «03 + |ji [I col - (A-0 .3 eu]
9s r~*T—n" = sinG sin(|> A(6 f t cos(() - e 'c ) ) 1 sincj) + i(;ff sinGsincj) + ^ ! 0 T cos0sinc)) +°y I— —I
•»• ^ T ( ) ) f sin6 cos<j>) ~ (A-C) r0 (-e1 sincj) + ip1 sine cos<j>)J
•H sinecostj) |A(^e l f sin<() - e ' c j ) 1 coscf) + i^11 sine cos<(> H- ^ f O f cose cos(f>
- i(;f ( j> f sine sirnfr) + (A-C) r0 ( e f coscj) + ^ f sine sin<(>)J
||TT - sine jj A e1 < ( > f + A ^ f l sine + A ^! 6 f cose + (A-C) ro 6^]
- sine [j A e ! 4> ! + Aipflsine + 2A^ !e fcose + A ^ T e f - oj/'cose e f - c^ ' e^ j= sine £A ip f f sine + 2 A i|;f 8'1 cose - C r0 6-f j
= A if;11 sin2e + 2 A ip f e f cose sine - C rg sine e 1
|| = ^ (A f sin^e + C r0 cose) = 0
d'où une nouvelle intégrale première
A ij;1 sin2e + C TQ cose = X C TQ
lSiiâ£Î2S« l§EEÊl«âl§}.
p\ c
££_. = A e f f + A $' < f > ! sine - (A-C) r0 * f sineou
= A e f l + A $' < | > f sine - A if;' sine^1 cose + c ^ f ) + C r0 *'f sine
= A e f f - A ty'2 sine cose + C r0 *f sine
= A e f f - ^ f sine (A \l)' cose - C r0)
3TI—- = m g 1 sine d'où l'équation d'appel en eo 9
A e f l - (A ij;1 cose - C ro) ^ f sine = m g 1 sine
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 565 -
7.2.4 EQUATION D'APPEL LAGRANGE POUR LES SYSTEMES A LIAISON SANS REDUCTION AU NOMBREMINIMUM DE PARAMETRES
On adopte les notations utilisées pour les équations de LAGRANGE.Les équations de liaison sont
fj(qi ••• qi ••• qn»t) * o j = i ... haj jqj + ... + ajiqi + ... + ajnqA = ° j = 1 ... 1
A. Cas généralL'équation de dVALEMBERT s'écrit pour une transformation virtuelle
quelconque(Al - Ql)ql* + ... + (Ai - Qi)q{* + ... + (An - Qn)q - 0
A 9S
Ai = M
3 SLes équations d'f.appel s'écrivent -T-TT = Qi
Qi représentant le coefficient de la puissance virtuelle développée partoutes les actions mécaniques.
Si on envisage des transformations virtuelles compatibles, leséquations s'écrivent avec multiplicateurs
3S * m
T~îT •* Q • + Y X. a.. m = h + 1K ^ j^i J J1
B. Cas particuliers : les liaisons sont parfaites et on a affaire àdes solides parfaits
Q* -- Q*vi iD
SS * 5 ,3 ï = QiD * .\l
XJ aJi
Nous voyons donc que sous cette forme les équations ne présententrien de spécifique. Nous allons voir que ce qui caractérise vraiment laméthode d'appel c'est la possibilité de réduire à un nombre minimum de para-mètres, que les liaisons soient holonomes ou non, du fait que Ai se calculeà partir de S et non de T.
7.2.5 EQUATION D'APPEL AVEC UN NOMBRE MINIMUM DE PARAMETRES. FORME SPECIFIQUE
A. Rappel
Rappelons les éléments de la théorie de l'irréductibilité quenous avions faite pour les équations de LAGRANGE.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 566 -
1°/ Nous avions un système à n paramètres liés par les relations de liai-son non holonomes
{ a^qj + ... + ajiqi + ... + ajn<ln = bj } J = l '" 1
2°/ Nous pouvions exprimer 1 vitesses q{ en fonction des n-1 autres grâceaux relations ci-dessous
<ls " Psj " frsj aji<ï{ ou
1s = ôs + ^si^l s - k+1 ... navec k = n - 1
3°/ Pour les vitesses virtuelles nous pouvions écrire
<u* - *.i.ii*4°/ La vitesse réelle de tout point P pouvait s'écrire
V(P) = aj qi + ... a^ q| + ... + a q^ + a
5°/ La vitesse réelle la plus générale de P était
V*(P) » a^i* + + Hq{ •«• ... *.akq *
B. Calcul des coefficients A-j par la méthode d'appel
Nous allons voir que la méthode d'appel permet effectivementd'utiliser cette réduction alors que la méthode de LAGRANGE ne le permet-taient pas
A* = 3g(P). * dm (définition générale)
P6S
A* = q'* f Jg(P).li dm + ,.. + q{* f Jg(P) ⣠dm
pes pes
+ q * f J8(P) ak dm
P€S
A* = A^i* + ..... + Aiq£* •+ ... + Akq .*
avec A£ = îg(P) a^ dm
P6S
Nous pouvons facilement exprimer les a£
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
- 567 -
V(P) = aiq{ + ... + a£q{ + ... + a q + a
JS(P) = tiqy + ... + liqï + .... + lkq^ + | + - qj + ... + *JL q£
, -»• 9J8(P)on a donc a,- = . .,1 sq"
Ai - { îg(P) | dm
1 f 3 2 A^ = -s- -—•rr dm1 2 pis 9qi
A 9SAI • âqyOn a le même résultat que précédemment. La réduction ne change Tien au calculde A^.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

SOMMAIRE
le PARTIE : EQUATIONS DE LAGRANGE
Pages
1 - Exemple de puissance virtuelle développée par les actions 2mécaniques
2 - Calcul direct d'une fonction de dissipation. 7Retour au procédé de réalisation dfun amortissement visqueuxavec du frottement sec
3 - Pendule de Wilson 10
4 - Déploiement des bras d'un satellite 17
5 - Balance gyrostatique de Kelvin 26
6 - Correcteur d'avance de phase 35
7 - Dispositif bifilaire pour mettre en évidence la rotation 49terrestre
8 - Equations du mouvement de la sphère de Bobylev 59
9 - Equations du mouvement d'un véhicule articulé 67
10 - Détermination d'un torseur de forces intérieures 79
2e PARTIE : EQUATIONS D'APPEL
1 - Variateur de vitesse automatique 94
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

1ÈRE P A R T I E
LES E Q U A T I O N S D E L A G R A N G E
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 1 -
INTRODUCTION DE LA PREMIERE PARTIE
Nous allons dans cette partie consacrée aux équations de Lagrange,
traiter un certain nombre d'applications. Celles-ci ont été choisies de ma-
nière à suivre l'évolution du cours.
Les équations de Lagrange sont un puissant outil analytique de mise
en équation lorsqu'on désire uniquement obtenir les équations du mouvement
d'un système. Leur utilisation devient plus délicate lorsqu'on veut détermi-
ner en plus les actions mécaniques développées dans ce système. Par contre
les théorèmes généraux étudiés au chapitre précédent sont dans ce cas d'une
plus grande efficacité.
Il est généralement souhaitable d'envisager l'utilisation des deux
méthodes, Lagrange pour le mouvement et théorèmes généraux pour les actions
mécaniques, la variation dans le temps de ces dernières étant obtenues plus
aisément quand on connaît déjà le mouvement.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 3 -
PUISSANCE VIRTUELLE DEVELOPPEE DANS UNE TRANSFORMATION VIRTUELLE
COMPATIBLE AVEC LES LIAISONS
ENONCE
Considérons la figure donnée :
- Le mouvement de la barre (1) est imposé ty = a>t.
- La longueur à vide du ressort est ln-
- La liaison (S )/(S«) est une liaison rotoïde imparfaite telle que :
C 2 = - C (0f -4,') Z
o
1) Calculer la puissance réelle développée par le poids P^.
2) Calculer la puissance virtuelle développée par P? dans une transfor-
mation virtuelle compatible avec la liaison telle qu'elle existe à l'instant t.
3) Calculer la puissance virtuelle développée par C dans les mêmes
conditions qu'en 2).
4) Calculer la puissance virtuelle développée par l'action du ressort-»•
sur la barre (2) notée F ,^ dans les mêmes conditions qu'au 2).
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 4 -
SÛLUT1ON
I - PUISSANCE REELLE DEVELOPPEE PAR P
?2 = - "S Yg
^/DS = V Vg(G2)
Calculons V8(G2>
-*a d^ —-Vg<9 - ft (°G2)
ÔGL = QA + AGI =r 1 r £ n£ cos ip — cos 0
= £ s in i(; + £ . A-r- sin 0o j L °
Rg Rgj— £ _£ cos ^ + — cos 0
OG9 = £ sin ^ + — sin 0
- ° J R g
d'où : i n- £ sin i|4' - — sin 60'
V8(G2) = «, cos W' + -| cos 66'
0 J Rg
D'où la puissance réelle :
0 ~j - l sin W ' - -| sin 66 ' ~
/^7)8 = - mg £ cos r|) i|» ' + - cos 6 6 '
L °J . °
2 r 6 f "i^^/ë = - mg£ cos W + cos 0 —*-x *" -I
Puisque i)j f = CD
/C7)g = - mg£ |(i> cos wt •*• cos 0 -y
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 5 -
II - PUISSANCE VIRTUELLE DEVELOPPEE PAR P2 DANS UNE TRANSFORMATION VIRTUELLE
COMPATIBLE AVEC LA LIAISON TELLE QU'ELLE EXISTE A L'INSTANT t :
r~ £ "i- £ID sin cot - y sinQQ1
~*e aVô (G?) = £ a) cos o>t + — cos00f
(réelle) 2
0 J R0
La vitesse virtuelle s'écrit donc ici :
"- | 0 f*sin e"
~^<?* P *V8(G2) = | 0 f cos 6
0 J-Rg
d'où :
" 0 1 f" - -| 0 f*sin 0 "/"""""V*f)p - - mg | 0 f*cos 0
L° J L °
* i *^D = - y mg£ e ' cos e
III - PUISSANCE VIRTUELLE DEVELOPPEE PAR C
c12 = - c (e1 - *••) z
^D* = c J 2 .-fif
^ . ï Ç . ^ . ( e - - * ' ) î g
«2 - (e1 - oj) zg
->•!* * •*d f o ù : Q* = 01 Z
£ o
et donc ffi? = - C (01 » i p f ) 0 f *
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 6 -
IV - PUISSANCE DEVELOPPEE PAR FR/2
~G~~t2
F , - - k (L - £ ) J_»R/2 ° I^TSl
L = I^Sl
V2="°S-~K
r £ £ n£ COS ty + --r- COS 0 - -T- COS ij;
^ £ £G-G = £ sin ty + y sin 0 - — sin i(;
_ L o >gy (COS ty -f COS 6)"
G1G2 = 1 (sin * + Sin 6^ J Rg
2 o^ f ? 2 1L = — (cos i|; + cos 0) + (sin ty + sin 6)
£ F 2 2 2 2 "1- _ cos ^+sin ^ + cos 6-t-sin 6 + 2 cosif; cos6 + 2 sini); sin6
2 p -,= ~ 2 + 2 cos -(e-ifr)
L2 - -y l * cos (&-*)]
- 4 [* -2 <¥>]T 2 2 2 ,6 - »NL = £ cos (—j-x)
L = £ cos (6 ~2 ^)
^ - k L £ C O S (—5-^) - £ I - (cos ty. + cos 6)d'où : FR/2 —L °—
£ cos (-yi) ! (s.n ^ + s.n e)
0 RL 4 g
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 7 -
r- Q *-.- | sin ee f
v*(G2) = | cosee'*
0 J Rg
d'où :
x-^* kA L£COS -r1) ~ *0J rfnO = r- ; - (cos i / /+ cose) sin 6 + (sin ^ + sin 6)Is/ 4 /" ~ V\77 cos (~2 }
cos e e1*
* cos ( -i) - A/-^v* k£ = ii- sin (i//-6) 6'fyP = ~ ~ /e -_*,t7 [ cos <-yJt) J I
/TV* ki f . ,e - I/K .1 . /il; - es „,*X^T = -_ ^cos (—g-i) - £ Q J sin (L—) 0'
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 9 -
CALCUL DIRECT D'UNE FONCTION DE DISSIPATION.
RETOUR AU PROCEDE DE REALISATION D'UN
AMORTISSEMENT VISQUEUX AVEC DU FROTTEMENT SEC
ENONCE
Reprenons l'énoncé et la figure du problème page 76 des théorèmes
généraux (Chapitre 6 exercices).
r + + +1Soit le solide S0 auquel est lié le repère RQ : 0, XQ, Y , ZQ
(Zn vertical ascendant).
Soit un solide S animé d'un mouvement de rotation par rapport à Sn
grâce à une articulation rotoïde d'axe OYn. S est essentiellement constitué"*"d'un cylindre d'axe OYn et de rayon r.
-> -* +A S on lie le repère R : (0 X Y Z ) tel que
•> •+Y = Y*1 0-»•Z arbitraire
X, = Y, A \
-* ->
On repère la rotation de S /S par l'angle (Z , Z ) = 0
Soit un solide S : S« est animé d'un mouvement de translation par. o
rapport à SQ : OG = y avec h « constante. S repose par sa partie inférieureLhJpR0
(plan TT) sur la génératrice supérieure du cylindre S . S a pour massem.
S est animé d'un mouvement de rotation (8' = co supposée constante).
82 est animé d'un mouvement de translation (paramètre y).
On suppose qu'il y a du frottement au contact (S )/(S?) (coefficient
de frottement f).
Calculer la fonction de dissipation par un calcul direct.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
- 10 -
SOLUTION
I - L'ACTION DE CONTACT EST :
- > • - > • • >F » T + N*12 12 12
f r0f -]mgf
V/r'e'2*,'2
•*• v1
F,2 = ~ mSf —=±=\/r2e'2 + y
2
mgfRo
II - LA VITESSE VIRTUELLE EST DANS UNE TRANSFORMATION VIRTUELLE COMPATIBLE :
- r0f* "~M *Vjd) - y'
- ° JRO
III - LA PUISSANCE VIRTUELLE EST :
xTf = - mgf r 2 e ' e«* - mgf ^ y'*
V V / r 2 6 ' 2 . y ' 2 \ / r 2 e ' 2+ y ' 2
IV - S'IL Y A FONCTION DE DISSIPATION GENERALISEE on doit avoir :
9* c r2 6 ' ....•âjr " + mg£ • (Dn 2 2^
^r2 6'2 + y'2
^L = mgf . ^ (2)dy ._ - -.
. \/r2 6'2 -H y '2
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 11 -
Intégrons par exemple à partir de la dernière relation :
2 2 2 1/2i); = mgf (r 9f + y1 ) + g (61) (g fonction de 0f seulement)
j , mi. '2°' * f,^2.'2*,-2'Par identification -7 - = 0 g = cte
dW
i/2
$ = mgf (r 6fZ -H y|Z)
Iv'lV - CAS OU LA VITESSE 6f EST CONSTANTE 0 ' = <o AVEC i |y» ! «1
I ro> I
,2 1/2ij; = mgfro) (1 + ^ 2 ^
r a)
y'2 1 vf4
4» = mgf roo ( 1 + ~ 2 2 " 3" 4 4 * ' * ' ^r a) r w
Si on se contente du premier terme = c|>
1 mgf ,2* = 2 A y
$=lby'2 I TT T
2 r a)
VI - CONCLUSION
Plus u) est grand plus b est faible. Ce procédé est utilisé pour
réduire le frottement. Le mouvement de (S ) par rapport à (S ) est qualifié
de "louvoyant11. Ce procédé du mouvement louvoyant pour réduire le frottement a
été très employé pour réduire le frottement dans les mécanismes.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
- 13 -
PENDULE DE WILSON
ENONCE
Ce problème a été traité par les théorèmes généraux au chapitre 6
exercices page 204.
Notre but est alors simplement de retrouver par la méthode de Lagran-
ge les équations du mouvement obtenues et récapitulées page 213.
Pour cela, reprenons l'énoncé et la figure.
Considérons le système composé des 4 solides (Sn), (S ), (S?) et
(S«) comme l'indique la figure.
(SQ) est considéré comme le bâti de l'appareil.
(S ) est un cadre de masse négligeable (appelé armature externe), en
rotation autour d'un axe horizontal An de Sn.
(S-) est un cadre de masse négligeable (armature interne) en rotation
par rapport à (S ) autour d'un axe A orthogonal et concourant avec A au point
Oj = 0.
(S ) est un rotor (gyro) de masse négligeable en rotation par rapport
à (S ) autour d'un axe A orthogonal et concourant avec A au point 0 = 0 .
L'armature interne (S2) comporte une manivelle CB dont l'extrémité B
est reliée en A à l'armature externe (S ) par un ressort de raideur k.
Toutes les liaisons (S.)/(S.) sont rotoïdes parfaites.
On procède au repérage suivant :
A (SQ) on lie le repère RQ : |0, XQ, YQ, ZJ galiléen tel que
•*•ZQ dirigé suivant la verticale ascendante->XQ porté par l'axe de la liaison <Sj)/(S0)
0 = 0 A 0
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 14 -
A (Sj) on lie le repère Rj : Oj, X , Y , Z tel que
°1 5 °•* -*"
Xl =X0"*"Z porté par lfaxe de la liaison (S?)/(S )
Y, - \ A X\
On repère la rotation de R,/Rn par l'angle
0 • (V VA (S2) on lie le repère R2 : U>2, X2> Y2> zj tel que
-»• -»•Z2 ' Zl->•
Y2 porté par l'axe de la liaison (S )/(S )
X2 - Y2 A Z2
On repère la rotation de R9/R. par l'angle
g - (xjf x2)
A (S3) on lie le repère R3 : 03, X3> Y , Zj tel que
°3 E °2->• ->•
Y = Y3 2
->X arbitraire- > - > - >Z 3 = X 3 A Y 3
On repère la rotation de R«/R9 par l'anglej -
Y = (X2, X3)
Les dimensions du système sont telles que :
" 2 - 1 \
ÔB" = r x2
"ÔA = a Xj
Ô = h Zj
Le rotor S. a pour masse m.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
- 15 -
Sa matrice d'inertie en 0 exprimée dans R- est la suivante :
"" A 0 0 1
f = 0 B 0
[O 0 Aj^
Le ressort de raideur k est sans contrainte pour une longueur L = a-r.
On demande de :
- Calculer l'énergie cinétique du système.
- Calculer la fonction de force.
- Ecrire les équations de Lagrange du mouvement.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 16 -
SOLUTION
Trois paramètres indépendants a, $, y sont nécessaires à la description
du mouvement du système. Les actions de pesanteur (gyro) et du ressort dérivent
d'une fonction de force.
Toutes les liaisons sont considérées comme parfaites, donc pas de fonc-
tion de dissipation.
Enfin il n'y a pas de forces données.
Dans ce cas les équations de Lagrange s'écrivent :
J. / 9T 3T _ 8U _dt Sq' .' "" Bq. 3q.
^ i ni Hi
I - CALCUL DE L'ENERGIE CINETIQUE T
La masse du cadre étant négligée on a :
T0 - T01 3
T'(3)4»[7(o3)]2 + iao . r03£o
+ -> -> "A/ Qj - 0 + flj + J
Ǥ = Y' Y2 + 6f Z2 + a
1 X,
- > - > - >X = cos 6 X2 - sin 3 Y2
a' cos 30 = yt . ai sin g
L3' . . . RJ R2->- ->
Le gyro est de révolution autour de Y9 = Y . La matrice d'inertie est
donc :
"A 0 0 "
Ï03 = 0 B 0
L ° ° A J R RR3'R2
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
- 17 -
On a :
£ 3° ~o3 - n° = y [A (a'2 cos2f5 + 6'2) + B (Y' " °' sin B)2 ]
+ H O —*- di°<^ .* —*- ra'i r°"B/ V°(0_) - £r 00. jr- + -0° A 00 - 0 A 0
^^ L° JR i WRi- - 0
r °V°(0,) - - £o' .L o JR 1
[vO(03)]2 - £2 ex'2
C/ Finalement on obtient :
T0 . 1 |"m£2 a'
2 + A (a|2 cos2$ + g'2) + B (y1 - a' sin 6)2J
II - CALCUL DE LA FONCTION DE FORCE U
U = U p + U R
II- = - mg£ cos a •*• G
U R ~ - | & - * 0 1 2 + C 2
= - | |"\/r2 + a2 - 2 ar cos 6 - (a-r)l + C2
k r n 2 i2U = - mgî, cos a - j \ Wr + a - 2 ar cos 6 - (a-r) + C
III - EQUATIONS DE LAGRANGE
A/ Equation oC(y) :
_d_ ,3T . H iïïdt ^3Y'
; " 3-Y ~ 9y =
j rsm
T et U sont indépendants de y donc -r- (—r) = 0
3T__ = cte
j\f^T- B <Y' - a1 sin g)
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 18 -
On obtient ce qufon appelle une intégrale première. On a pour habitude
d'appeler la constante rn.
y1 - a1 sin B = rQ (1)
CDB/ Equation oC-(a) :
JL r-lLw il _ J£ - odt Sa'; 8a " 3a
^T 9 ?T^T = (m* + A cos B) a1 - B sin 6 (y1 - a1 sin 6)OUI
2 2= (m£ + A cos #) a' - B rQ sin g
-j7 (r) = (m£2 4- A cos2B) a" - 2 a1 6' A sin 3 cos g - B rn cos B6f
'Ût oOt U
il- o3a " °
3U „ .— = mg£ sin a
d'où Sf(a)
2 2(2) (m£ H- A cos g) a" - 2 A a1 -Bf sin g cos B - B r Bf cos B - mg£ sin a = 0
Dans cette deuxième équation on a déjà utilisé l'équation (1).
C/ Equation oC(B):
JE. ( 8T ) - II 1£ - odt ^8Bf 3B 36
-2ï-- A6'3B1 3
É- (^AB"3T 2TT- = ~ A a1 cos B sin B •+ B (y.1 - a' sin B) (-a1 cos B)dp
2= - A a' sin B cos B - B rn a
1 cos B
I? - - k r\/r2 + a2 - 2 ar cos B'- (a-r) x ar sin g
9B \/ r^ g 'J \/r + a - 2 ar cos g
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 19 -
d f où ££(B)
2 k LVr +a2-2ar cos (3-(a-r)J ar sin 3
(3) A3" + Aaf sin g cos g + B rn a' cos 3 + ———— — * 0U /~~2 2 "~"~
y r -H a - 2 ar cos B
Dans cette 3ème équation on a aussi utilise l'équation (1).
IV - CONCLUSION
On retrouve bien lés équations du mouvement obtenues par les théorèmes
généraux.
On voit sur cet exemple que la méthode de Lagrange est d'un usage beaucoup
plus systématique que l'utilisation des théorèmes généraux. Il ne faut pas cepen-
dant croire que les théorèmes généraux vont tomber en désuétude. Nous traiterons
des exemples comparatifs dans lesquels ils seront réhabilités.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 21 -
ETUDE DU DEPLOIEMENT DES BRAS D'UN SATELLITE
ENONCE
Pour étudier le déploiement des bras d'un satellite (bras destinés au con-
trôle de 1'autorotation) on emploie au laboratoire le modèle expérimental suivant :
(SQ) est le laboratoire. Le corps du satellite (S.) est en rotation autour
d'un axe fixe et vertical de (S ). (S ) et (S ) sont les bras du satellite. Ce sont
des solides en rotation autour d'axes fixes et parallèles de (S ), orthogonaux à
l'axe de rotation de (S^/CSg). Toutes les liaisons sont rotoïdes.
- A (SQ) on lie le repère (RQ) : JO, XQ, YQ, ZQ1 :
0 sur l'axe de la liaison (S,)/(SA)-». l uZQ vertical ascendant porté par l'axe de la liaison (S )/(Sn)-*Xn arbitraire
W^- A (sp on lie le repère (Rj) : °» X J f Y , Z
Oj tel que 00 « ~h*^Q-* ->zi = zo->Yj porté par l'axe de la liaison (S )/(S )- * • • > - » •X, - Y, A Z,
On repère la rotation de (R ) / (R ) par
* - (XQ, X,)
- A (S2) on lie (RZ) : fo2 § X2, YZ, zj
02 est situé sur l'axe de la liaison (S^/CSj) et tel que Ô"o = a X
Y s= y2 M
- G2Z9 = —5— G0 centre d'inertie de (S0)^ *<2 L 2
X2 = Y2 A Î2
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 22 -
On repère la rotation de (S )/(S ) par
e2 = czr v- A (S3> on lie (R3) : 03> X3, Y^, IJ
083 --a3X,-> ->
Y = Y3 1
- °?3z = — G centre d'inertie de (S )
•J X/« j O
X3 = Y3 A Z3
On repère la rotation de (R )/(R ) par
e3=(T1>?3)
Les caractéristiques d'inertie sont pour chacun des solides :
Masse Centre d'inertie Tenseur d'inertie
FA1 ° ° "(Sj) Mj Gj sur l'axe (0, Z{) Î0] = 0 Bj °
L° ° CJR1 RlA2 0 0 "
(52) M2 G2 IG2 = 0 B2 0
L° o c J2 R2
A3 0 0 "
(53) M3 G3 ÏG3 = 0 B3 0
L° ° cJR3Entre (S ) et (S2) agit un ressort tel que
FR2 " ° %2(02) = - k2 (02 - 620) Yj
De même entre (S ) et (Sq) agit un ressort tel que
% = 0 %3(03) = - k3 (63 - 63()) Yj
Les liaisons (S )/(S2), (S )/(S ) ne sont pas parfaites et l'on a :
S12(02) •*! =- b2 e >2
->• -»•
Mi3(o3) • Yi = " Va
La liaison (S )/(Sn) est supposée rotoïde parfaite.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 23 -
On applique en outre des actions connues à (S.) et à (S,) telles que
Î 1 2-o Î 1 3-o
S12(02> = M,*, S13(03) = M2?,
1) Mettre en équation le problème par la méthode de Lagrange.
2) Comment peut-on retrouver ces équations par les théorèmes généraux ?
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 24 -
SOLUTION
I - METHODE DE LAGRANGE
Trois paramètres ij;, 0~ et 0 indépendants sont nécessaires à la descrip-
tion du mouvement du système.
Les actions de pesanteur et de ressorts dérivent d'une fonction de force,
Les liaisons n'étant pas parfaites, il y a fonction de dissipation.
Enfin il y a des forces données.
Dans ce cas les équations de Lagrange s'écrivent :
J_ (JL ï JL = 3U JLt.dt ^3q! ' " 3q. 3q. " 3q! iDHi Mi Hi Mi u
A/ Energie cinétique TQ du système
0 — «pO + •pO -f ^0\ £m 3
1°) Calcul de T^f\
TI-|«I['OWI>] 4 «î-^s, •«?^(Gj) = 0
n° = *• z,
d'où Tj = le, *'2
2°) Calcul de T°
fy
To _ ± « f V°CG n + - Jo f« oQX2 2 W2 L 2;J 2 "2 2 2
V°(G2) = V°(02) + n° A < G2
V°(02) = fi° A Ô 02 = a2 ip1 T2
"- ijj' sin 6.
^-nj + oî-e^fj + vî, - e'24»' cos 62J
R2
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 25 -
°?2 = 12 *2
d'où :
F £ 2 6 '2V°(G2) = (a£ + £2 sin 6^ i|»'
L » Vd'où :
T2 = ï M2r2 622 + (a2 + *2 Sin 62 )2 *' J
+ y JA2 1>'2 sin2 92 + B2 922 + C2 ^ '2 cos2 ej
3°) Calcul de T°
Calcul identique à celui de T en remplaçant a« par - a_
e2 » e3
*2 " *3M " MW2 3
A2,B2,C2 » A3,B3,C3
T3 " I M3 T3 932 + (" a3 + S Sin 63)2 *'2 1
+ I I A3 *'2 sin2 63 + B3 e32+ C3 *'2 C°s2 63|
4°) L'énergie cinétique totale s'écrit donc :
I I I 0 O O OT° = -j < C j + A2 sin 62 + C2 cos 62 + A3 sin 63 + C3 cos Q^
+ M2 (a2 + £2 sin 92)2 + M3 (- ag + H^ sin 63)2 ij)'2
+ [M2 ^2 + B2]
622 + [M3 £3 + B3]
632 |
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 26 -
B/ Calcul de la puissance virtuelle développée par les actions mécaniques
1°) Fonction de force
U = UPl + Up2 + Up3 + UR2 + UR3
a) Up = cte = C
b) UP2 - - M2g£z£ - - M2g£2 cos 62 + C£
c) Up3 - - M3g£zO « - M3g £3 cos03 + C3
d) u = (62 - 62())2 + K2
e) UR3 - - (63 - e3Q)2 + K3
dfoù :
U - - M2g £2 cos 02 - M3g £3 cos 63
k k
- T (62 - 620>2 - T (63 * 930)2 + C
2°) Fonction de dissipation
Liaisons non parfaites
* - 7 b 2 6 2 2 * 7 b 3 e 3 2
3°) Puissance virtuelle des forces données
Ce sont ici deux couples :
^D*-^e'* +9^83*
d'où
Qe2D
Q6o -?3D 3
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
- 27 -C/ Equations de Lagrange
1°) Equation<^C(i);) ,
A. (8T ) _ 11 = i£ _ li + odt 8i/>! di|; Bip ~" a^1 >D
£ - • • #•«£-° v - °
, d , 9T . ndonc dF (W } = °
ai^•=cte
C'est une intégrale première.
On obtient :
E 2 2 2 2^ + A2 sin 62 + C2 cos 02 + A3 sin 63 + C cos 6
2 21•*• M2 (a2 + £2 sin Q^ + H^ (- a3 •»• £3 sin 63> i( f - cte
Si l'on pose cette constante égale à I if;1 on a
I îbf
v - °*°f <e2, e3)
La rotation du satellite est influencée par le mouvement des bras.
2°) EquationoL(62)
— ( 3T )- 3T - 3U 34»dt V 8 6 f
2; 362 ~ 962 " ae '2 ^D
3T 2
36^= ( M2 ^ 2 + V 6 '2
^ (W^ = (M2 *2 + B2) 6"2
3T 2 F" "1•§§--*' |^sin 62 cos 62 (A2 - C2) +M2(a2+£2 sin 0^ ^ cos 62
9U9ëJ * M2St2 Sl° 62 - k2 <62-620>
â^2 « »2 »\
\» © [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 28 -
d'où £f (62) ^
(M2 £2 + B2) e"2 - |(A2-C2) sin62 cos62 + M2 (BZ + #2 sin92) £2 cos 0J *'
- M2g A2 sin62 + k2 (62 - 920) + b2 6'2 = %/2
3°) Equation ^C(0 )
JL ( 3T N 3T _ BU _ 3j) + Q
dt Sef3
; " a03.." 303 " ae !3 ^93D
S'obtient directement à partir de o^(0 )
(M3 £3 + B3) 6 f l3 - I (A3 - C3> sin 03 cos 93 + MS (- a^^ sin 03)£3 cos03J^ f 2
- M3g £3 sin 03 + k3 (03 - 03Q) + b3 6'3 =Jï^
II - OBTENTION DE CES EQUATIONS PAR LES THEOREMES GENERAUX
Nous avons vu dans le chapitre précédent que les équations du mouvement,
c'est-à-dire sans inconnues dynamiques s'obtenaient généralement en projection sur
l'axe des liaisons du système. Cette manière de procéder est toujours valable ici.
De plus nous n'avons que des solides en rotation. On est donc certain que ces équa-
tions seront données par le théorème du moment dynamique.
A/ Théorème du moment dynamique appliqué à l'ensemble S U S0 U S en 0' 1 2. J •"—— 1
*0<0i>-5«t<°i>Appliqué à l'ensemble on a alors :
"ext(V-V°
la liaison S /S étant parfaite on a donc :
+0 +6 (0,) • ZQ - 0
mais î(0 ) * — y^CO.) (0 point de l'axe fixe)
donc f °«V . V=0
d'où directement ici :
-+Q + ->0 ^
y (Oj) . ZQ - y (Oj) . Zj - cte
Ceci est une intégrale première.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 29 -
"* -*oSeule la composante sur l'axe Z de y (0 ) de l'ensemble nous est néces-
saire.
'îx> -vv +;s2<v s3(0l)(o,) =Ï0].
%'V =ÎG2 «S? + °72
A M2 *<G2>
%((V =ÎG3 «^ + °?3 A M3 G3}
Une fois les calculs menés sur R la composante sur Z donne :
t '2 2 2 2C + A2 sin 02 + C2 cos 62 + AS sin 03 + C3 cos 03
+"M2. (a2 -H /2 sin02)2 + MS (- a3 + /3 sin03>
2 ij,
f - cte
C'est l'équation oCV) .
B/ Théorème du moment dynamique en 09, appliqué au solide S en projection
sur l'axe de rotation Y = Y^.
^ '?2.-S«t <V '?2
->0 " *Le calcul ô (0?).Y pour S« donne
(B2 + M2 £2) 6"2 - i(;'2 cos 82 KA2 » C^ sin 82 + M^ (a2+ £2sin 02)J
^ ->Le calcul de M (0 ).Y donne
6XU tm £m
7722 - b 6'2 - k2 (92 - 02Q) + M2g £2 sin 02
On retrouve bien o f(69)
C/ Théorème du moment dynamique en 0 appliqué au solide S^ en projection
sur l'axe de rotation Y = Y
De la même façon on obtient immédiatement (0) .
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 31 -
BALANCE GYROSTATIQUE DE KELVIN
ENONCE
Un système est constitué d'un losange OBAC articulé en 0, B, A et C à
l'aide d'articulations rotoïdes parfaites d'axes perpendiculaires au plan du lo-
s ange.
Chaque barre du losange contient un rotor tournant (gyro) de masse M
dont l'axe est celui de la barre. La barre OB contient le gyro (S ), la barre BA
le gyro (S2) ; G et G désignent le centre d'inertie des gyros (S ) et (S ).
Lorsque le losange OBAC est complètement aplati (6 = 0), en supposant le
cadre réduit aux barres, la rotation des 4 gyros sont de même sens.
Au point A est suspendu un corps (S ) de masse M., et de centre d'inertie
G3'On supposera que la masse des armatures est négligeable.
On demande de :
1°/ Faire le paramétrage du système.
2°/ Calculer l'énergie cinétique du système.
3°/ Calculer la fonction de' force U du système.
4°/ A l'aide de la méthode de Lagrange déterminer les équations du mouvement.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 33 -
SOLUTION
I - PARAMETRAGE
A/ Repère galiléen RQ
Etant donné la configuration du système le repère galiléen RQ lié au labo-
ratoire sera défini comme suit :
Origine 0 point fixe->Zn vertical descendant_> ->.Xn perpendiculaire à Zn arbitraire
?o = *o A *o
B/ Repère R lié au plan du parallélogramme
Le plan du parallélogramme peut tourner autour de l'axe vertical OA. Il
est nécessaire donc de repérer cette rotation. Pour ce on choisit R lié à ce plan
tel que :
°i E 0-* -*zi = zo-> +X. perpendiculaire à Z dans le plan du losange
- * • - * +Y, - Z, A X,
On repère la rotation de R /Rn par l'angle-> ^ 1 0
* - (X0, Xj)
C/ Repère R lié à la barre OB
Le parallélogramme étant déformable autour d'un axe perpendiculaire à son
plan et la longueur des barres étant constante et égale à 2a, le repérage d'une
seule barre est nécessaire. A la barre OB on lie donc R^ tel que :
°2 ± "ÔB"Z2 = 2l•> •*Y = Y2 1
- > - » • - > •X2 = Y2 A Z2
La rotation est repérée par l'angle 6 tel que
6 - (Xj, X2)
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 34 -
D/ Repère R lié au gyro (S ) monté sur OBb 1
Ce gyro étant en rotation autour de OB, le repère R lié à ce gyro seraD
tel que :
G origine
-+ -»•ZS = Z2"*• "*X_ arbitraire perpendiculaire à Zçb b
?s = zs A xsOn repère la rotation de RC/R0 par l'angle <|> tel que
D Z
* - (x2, xs)
Ce repère R a aussi l'avantage d'être principal d'inertie pour le gyroD
S dont la matrice pourra alors s'écrire :
r -, TA o-IG, - AL J LO cj Rs
E/ Repère R. lié à la barre AB
Nous avons dit que seul le repère R^ était nécessaire pour caractériser
la déformation du parallélogramme. Ceci est toujours vrai. Cependant pour le
repérage du 2ëme gyro (S2>, il est commode de passer par un repère R lié à AB
tel que :A origine-»• -»•Y = Y3 1
y -À5"X3 " 2Ï
Z3 - X3 A Y3
On repère la rotation de R«/R par l'angle 0 tel que_> _>. J * 1
e, = (z,, z3)Nécessairement les angles 0 et 9 sont liés par la relation 6 = — - 0
F/ Repérage R lié au gyro (S ) de AB
&Le repérage R est aussi défini de façon identique à R0 :
b 3
G origine
-** ->XS • X3" * •>*
Y arbitraire perpendiculaire à Xb b
-** -+£ •+#
zs = xs A Ys
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 35 -
La rotation de Rg/R3 est repérée par l'angle <j>} tel que
* i ' <V *s}
Cependant comme les 4 gyros ont les mêmes rotations on a :
+ f! = - *'
Ce repère R a aussi Davantage d'être principal d'inertie pour leD
gyro (S ). On peut donc écrire :
r 1 [C 0"
W • 0 * A KS'*— J b
G/ Conclusion
Le système étant symétrique autour de la verticale OA le repérage des
éléments de la partie gauche est inutile.
Portons sur un schéma les différentes rotations. On est donc en présence
d'un système à 3 paramètres indépendants ij>, 0 , 4> , bien que la commodité de
repérage en nécessite 5.
11 ~ CALCUL DE L'ENERGIE CINETIQUE DU SYSTEME
On peut écrire :
T° = 2 [~T° +T?1 +T°L sl S2J S3
A/ Calcul de T_-___- 5 j
o 1 F -*n 1 1 ->° = ->°^.-i11!7^ 4 fis G, -
ns
->0 1 ->-01°) V (Gj) = V (Gj) + V^Gj)
-»-0 -»• -»•V (Gj) = a6' X2 + at|)' sin 6 Y2
2°) n° est à exprimer sur R2 car [ J = [ij
0 .2 1 _0
"S = S + S + "l
ng = <(,' z2 + ef Y2 + ' Zj
" - (Jj1 sin 6+0
"s = e
<))' + $' cos e DR23°) On obtient ainsi :
T_ = - M (a2 6'2 + a2 ij>'2 sin20) + A (6'2 + 4>'2 sin20) + 4" C (<(. ' + *' cos 6)2b . Z 2 2
1
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 36 -
oB/ Calcul de T052
0 i r+0 l2 i +0 = +0I S 2 - i M [ v ( G 2 ) J *I «... '^V
->-0 -vl +01°) V (G£) = V (G2) + V ] (G 2 )
a) V (G2) = V (A) + ft ^ A ÂG2D
4 a 0 f sin 0 cos 6
V (A) = ~^~at = ~ 4a6' sin e Z i = 0dt 1- 4 a 0 1 sin 6 „
R3
r-4> ?i r a i r o "S ^ A AÎG! = -ef A o = 0
S* 2
-^° JR L° JR Lae!J RR3 R3 R3
b) ^(62) s V j C G j ) = a i(;f sin 6 YS
Finalement :
4 a 6' sin 0 cos 0+0V (G2) « a ^ sin 0
a 0 f - 4 a 0 f sin20 _R3
p- -O "1^ ? ? 9 9 9 9 9 92°) V (G2) - a 6' + a *' sin 6 + 8 a 6' sin 6
3°) peut s'exprimer sur RS car [ij^ - [ij^
-»-0 -vl ^.0
" -+ '1-e1 + v zL » Ja3
- cos 0
z, - o
L s ineJR3
donc : [-$ ' -i|» ' cos 6->0n * = -e's* , .
i|»' sin 6 LR3
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 37 -
4°) Finalement :
TS = I M I *2 6 '2 * sin20"f 8aV2*in2e 1 + y C (4> f + * f cos 0)2
+ 1 A (0'2 + i|/2 sin2 6)
0C/ Calcul de T0S3
0 i F +0 l2
TS3 = 2 M 3 | . V < G 3>J
0 1 2 2 2• T_ = 4 M, . 16 a 6' sin 6
3"
D/ Energie cinétique totale
Après regroupement et simplification on trouve :
T « 2 (a + g sin20) 0f2 -H 2 ai);f2 sin26 + 2 C (<|>f •«• i|;f cos 0)2
2avec a = A + M a
•3 - 4 a2 (M+M3)
III - CALCUL DE LA FONCTION DE FORCE DU SYSTEME
II y a fonction de force due aux poids des éléments
U = 2 (US] + USz) + Ug3
A/ Calcul de Uc— «5j
U « Mg z(G ) « Mga cos 0bl l
B/ Calcul de U0S2
Uc = Mgz(G0) = Mg (4 a cos 0 - a cos 0)î>O ^
Ug = 3 Mga cos 0
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
- 38 -
C/ Calcul de IL,s3
% = M3gz(G3}
U. = 4 M0ga cos 03
D/ Fonction de force totale
U = 4 ga (2 M + M3) cos 6 + été
IV - EQUATIONS DE LAGRANGE
II y aura 3 équations de Lagrange
cSf (6) , S£W et £?(+)
A/ Equation de<*L(<j>)
J_ (J£L\ il i£ - ndt ^cfr1' " 8<() 3<|)
%T~ = C (<(>' + K,1 cos 6)
3T SU— = -r-r = 0 (T et U indépendants de ((>)o<p o(p
On a donc :
8Tw= cte
soit è1 + ipf cos 0 = cte = ro
C'est une intégrale première.
B/ Equation^LÇij;)
A C-âL\ - il M = ndt ^?; " 3ip 8i(;
3T 2•TJTT = 4 a^ f sin 0 + 4 C ( < f > ! + ^.f cos 0) cos 0
9T 3U= _. « o (T et U indépendants de $)dtp dlp
On a donc :
3T , . 2•JTT = cte ai( ; f sin 0 + C r cos 0 = cte
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 39 -
On a pour habitude de poser cette constante égale àXC r . On verra
l'utilité de cette écriture
2ail;' sin 0 + C r cos 0 = A C rr o o
Cfest une deuxième intégrale première.
C/ Equation oC(0)
JL ( aT ) - H - M . odt Se1 30 " 96
• T = 4 (a + 3 sin20) 0'du
-r- O r) * 4 (a + 3 sin20) 0" + 8 B0'2 sin 0 cos 0dt 90
3T 2 2•2i = 460' sin 0 cos 0 + 4a^f sin 0 cos0 - 4 C $' sin 0 (c()f + i^f cos 0)90
^tî!£ - - 4 èg (M. + 2 M) sin 6dW O
On a donc après simplification :
2 2(a + g sin 0) 0" + 460' sin 0 cos 0 + 44> fsin 0(Cr - ai/;1 cos 0)
+ ga (2 M + MJ sin 0 = 0
D/ Récapitulation
Nous avons 3 paramètres ip, 0, cf> indépendants nécessaires à la description
du système.
Ils entrent dans 3 équations indépendantes du mouvement qui sont :
<|>f + i|;f COS 0 = r (1)
2ou/;1 sin 0 + Cr cos 0 = XCr (2)
2 2(a + 3 sin 0) 0" + 400f sin 0 cos 0 -H 4t//fsin0 (Cr - onl>' cos 0)
o
+ ga (2 M + M3) sin 0 « 0 (3)
E/ Remarque
On aurait pu se dispenser d'écrire la Sème équation de Lagrange C( ) •
Une 3ème intégrale première plus intéressante peut être fournie par l'intégrale
des forces vives T = U -H h. On est bien dans son cas d'application. On obtient
alors :
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 40 -
2 (a + 3 sin 0)0' + 2 aipf sin20 + 2 G r 2 = 4 ag (M + 2 M) cos 0 + h
soit encore :
(a + g sin20) 0'2 + aip'2 sin20 = 2 ag (M + 2 M) cos 0 + h
C'est une quatrième équation qui peut se substituer à l'une des trois
autres obtenues précëdenrament.
V - CONCLUSION
Nous établissons ici les équations du mouvement du système en tant
qu'application directe de la méthode de Lagrange. Nous reprendrons ce problème
par la suite pour justifier l'utilisation de ces équations.
Il va sans dire que les équations obtenues pourraient l'être aussi par
l'application des théorèmes généraux.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 42 -
ETUDE DYNAMIQUE D'UN CORRECTEUR D'AVANCE DE PHASE
ENONCE
Un système est composé de 3 solides (SQ), (S ), (S ) disposés comme
l'indique la figure. (S.J est formé par la réunion de deux cylindres creux co-
axiaux, de sections respectives S et S . (S ) est un cylindre plein, de sections
S et de masse m . (S ) est un cylindre plein, de section S et de masse m . Les
liaisons (SQ)/(S ) et (S2)/(
S0) sont des liaisons prismatiques parfaites. (S )
et (S ) sont reliés par un ressort à caractéristique linéaire, de raideur K, et
de masse négligeable. Lorsque le ressort est sans contrainte, la distance 00
est égale à £ . (S ) est percé d'un orifice circulaire de rayon r. On a en outres. > V
(Sj) et (S2) délimitent dans (SQ) trois cavités (1), (2), (3) de volumes
respectifs V , V^, V variables. Ces trois cavités sont remplies d'un liquide de
viscosité dynamique y. Les cavités (1) et (3) sont reliées par une canalisation.
On admettra les résultats suivants de la mécanique des fluides :
- l'écoulement entre les cavités (2) et (3) est régi par la loi de Poiseuille.
- la canalisation entre les cavités (1) et (3) entraîne une perte de charge
négligeable, de sorte que p- « p .
- les cavités sont suffisamment faibles et les vitesses dans ces cavités suffisam-
ment faibles pour que l'on puisse y considérer la pression uniforme (on néglige
en particulier, ainsi, l'effet de la différence de section (S -S ).
On repère les déplacements des pistons (S ) et (S ) par—^ -* .+ 1 200 * x X X porté par l'axe
°\ = X2 *0
Ôfc = £, XQ
On choisit le sens de Xfi de telle manière que x et x soient positifs.
Au solide (S ) on applique le torseur :
-> ->F = F Xne e 0
M (A) = 0e
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 43 -
Au solide (S?) on applique le torseur :-> ->F• » F Xns. s 0
M (B) = 0s
1°/ Ecrire les équations de Lagrange du mouvement.
2°/ Retrouver ces équations par les théorèmes généraux.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 44 -
SOLUTION
L'appareil présenté ici est utilisé dans la technique des systèmes asser-
vis. Son rôle est essentiellement celui d'un correcteur destiné à améliorer les
performances statiques (précision) et dynamiques (amortissement) du système tout
en le rendant aussi stable que possible.
Comme application de la méthode de Lagrange nous nous bornerons à la mise
en équation du mouvement du système.
I - MISE EN EQUATION PAR LA METHODE DE LAGRANGE
A/ Choix du système
On considère le système (S )U(S9). L'union est faite par le ressort.
Remarque : Le liquide qui entoure ce système ne fait pas partie de (S )U(S ).
B/ Calcul de l'énergie cinétique de l'ensemble (S )U(S?)
0 0 0T = T (s,) + T (S2)
0 1 F"*0 12 1 -*° = +°1 (s^-ïVovJ 4 °i • xo, «,
*°<°i> = xi *o3; = o
+ T°(Sj) =^Mj x'2
n 1 -»-0 2 1 ->° = -*-°2°) T°(S2) =lM2 [y (02)J +1 02 . IQ2 . ^2
V°(02) = x'2 XQ
^ = 0T°(S2)=lM2x'
2
3°) D'où finalement
T° * -î- IM x'2 + M x'2 eni 2 |Uj xr -H M2 x2 j u;
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 45 -
C/ Expression de la puissance virtuelle des actions mécaniques
appliquées au système (S )U(S2) :
Nous sommes dans le cas de solides parfaits et de liaisons parfaites :
<p* f*C V * = 0 et « L - 0
£/H>* (fêdonc c/ =L/ n : puissance virtuelle des forces données.
1°) Analyse des forces données au système (S )U(S )
- Torseur T appliqué à (S )
- Torseur T0 appliqué à (SJCi Ci
- Action du ressort
- Action de pression du fluide sur le système (S^)U(SJJ. Ci
2°) Puissance virtuelle développée par T :
Y?4 -*• +0* . rJ TI - Fe . V (0,) + Ç^^
« 0
° ;,-'.•< | «>3°) Puissance virtuelle développée par T :
* =F . x'* I (3)J7 T2 S 2 U;
4°) Action du ressort
a) 2S_£2SS§î£_!â_Ê2n£t -on e force U du ressort
* My ~ ÔTIci U = - 4" k (£ - £ )2 + cte
z o
/ • I V 2 Iô^2 - ôoj-- 05; = AI + x 2 - X ]
d'où (£ - £ )2 = (x_ - x, + £, - £ )2
o z i i o
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 46 -
d'où U = - y k (x2 - X| + £, - £Q)2 + cte
., . P* 9U ,* 9U ,*
d °U J ' Xi + âx^
J R = k (X2 " Xl + *1 - £0) Xî* - k (X2 " Xl + £1 " £0} X2* (4)
k) S«Sê.£2SSait-E§£-.Iâ-É2S££Î22-âê É2ESê«2Alors on revient à la définition de laçj
R
(j\ jr •> -^O^ ->• ->Q*
J R = FR/1 « V>,)+FR/2^J <°2>
00FR/1 = ' k (£ ~ V —L±-R/1 ° lO^J
0 0FR/2 - - k U - OR/2 ° Io,o2 |
->°* * "V (0,) = x|* XQ
v°* <o2) - <V
(-P* k (£ - V r— * — *i ^d R - - |rs^ [o20] . x; + 0]o2. x2*J XQ
^P* * * ViJ R - - k ( t - V (-x | + x 2 ) car-^L-=-X 0
ô]"82 -»•
^ R " - k < £ - v ( x i* - x 2*> et ÏW = X°5^ J - k ( x 2 - X l + £ , -y (x j* -x f ) (5)
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 47 -
5°) Actions de pressions
Ces actions de pressions s'exercent sur les 2 faces du solide (S^)
et du solide (S )•
Nota : On,néglige les diamètres des axes des solides S^ et S^ ainsi que le
diamètre du trou perce dans (S^).
Ces actions de pressions sont régies par les lois de la statique des
fluides qui nous disent :
- les forces de pression sont normales aux surfaces en contact.
- la pression est uniforme (faible volume).
- les actions élémentaires de pression étant parallèles, on peut les remplacer
par un vecteur glissant unique (Théorème de Vaugnon).
a) Les actions_de_£ression_sur_le_solide (S )
*P/1 = S1 *l*Q-*l*2*0
' < s ï p i - W *o*P/1 = Sl <PfP2> *0
' p / i = - si (p2-
pMT| (6)
dont le point d'application est 0 .
b) Actions de_gression_sur le solide (S~)
-*• - > • - » • 'FP/2 = S2P2 X0 " S2P3 X0
' S2 <VP3> X0
Mais puisque l'on néglige la perte de charge dans le tube liant les cavités (3)
et (1) on a : P = P
d'où ;p/2 = s2 (p2-Pl) 0 (7)dont le point d'application est CL.
C/ Analyse de la différence de pression
11 nous faut maintenant expliciter la différence de pression P ""?, au terme
des paramètres cinématiques décrivant le mouvement du système. Cette expression
nous sera fournie par l'hydrodynamique des fluides visqueux. On considère pour cela
que dans l'orifice de rayon r et de longueur e? l'écoulement qui se produit est du
type de Poiseuille, c'est-à-dire un écoulement laminaire (lignes de courant parallè-
les) se produisant dans une conduite circulaire. (Pour cela il faut admettre que les
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 48 -
forces d'inertie sont négligeables devant les forces de viscosité du fluide).
Dans ce cas on obtient une relation linéaire entre le débit volumétrique (varia-
tion de volume par unité de temps) et la différence de pression de part et d'autre
d'une section droite du tube.
Q = 1 A P
AP = P, - P2
K=i^C8)ïï r
y viscosité dynamique
Nous pouvons ici expliciter la variation algébrique de volume V? par rapport au— dV?
temps qui sera égale à Q = -*-=- .
Nous avons : V£ = S } ^ - (X j + )1 + S£ | x2 - -y 1
V2 = - S 1 X 1 + S 2 X 2 + S 1 * 1 + S l T - S 2 T
Par conséquent : ,v
^ = - d T = - S , X ' l + S 2 X < 2
Appelons Q = |Q|
Deux cas peuvent se présenter :
1er cas : ,Tr_ dvQ = -r - > 0 - AP > 0
dt
donc Q - 1 (Pj-P2)
d'où P2-Pj = R (SjX'j - S2x'2) (9a)
2ëme cas : ,„_ dVQ = —=- < 0 -»• P < 0
dt
donc - Q = 1 (W
donc P2-Pj = R (SjX'j - S2x'2) (9b)
d) Conclusion
En remplaçant (9a) et (9b) dans les actions de pression et en exprimant
la puissance virtuelle de ces actions par :
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 49 -
; - ÎP/, . v»'(o,,* îp/2. ;"<o2>on obtient :
y* - -S,R .(SjX', - S2x'2).xJ* + S2R (S ^ ~ S2x'2) x'* (JO)
6°) Récapitulation
On peut donc exprimer la puissance virtuelle de toutes les actions
mécaniques appliquées à (S )U(S2> '•
C?>* (P* <f* <f* tf>* (?>*u = J D -J Tj v T2 V R v P
* - Vl + FSX2* + k (X2 - xl + £1 - V (XÎ* - X2*>
- SjR (SjX'j - S2x'2) xj* + S2R (SjX'j - S2x'2) x *
En regroupant :
y* . [FB + k (x2-Xl r£0) - SIR (8 ', - s2x'2) ] xj*
+ [FS - k (x2-Xl+£rV + S2R (SlX'l - Vf2) ] X'* (n)
D/ Equations du mouvement
Nous avpns ici deux paramètres indépendants x et x_. Nous aurons deux
équations de Lagrange.
1°) Ecriture dec>o(x )
rv ï JL ( 3T ^ 3T - n(X1} * dt Vy 3x, " Qxl
3T ,ap; = m i x id 3T „dt "5?Y = mi x i
^=0axlQXJ = Fe + k (XJ-XJ+AJ-AQ) - SJ-R (SjX'j - s2x'2)
d'où l'équation en ordonnant :
mlX"l + S l2 R x ' l + kxl - S1S2 R X '2 - kx2 = Fe + k <W 02)
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 50 -
2°) Ecriture de °<5 (x2>
. , d r_9T_j. 9T _(V * dt ("9xT/ " " 2
3T ,7 = m2 X 2
d 9T „dF te^ = m2 X 2
JL=09x_
QX2 = Fs - k (x2-Xl+£r£0) + S2R (SjX'j - S2x'2)
dfoù l'équation :
m2 X"2 * S22R X'2 "*" kx2 " S1S2 r X tl " kxl = FS "" k (£l"V ^13)
(12) et (13) décrivent complètement le mouvement du système (S )U(S ).
E/ Remarques
On a remarqué :
- que l'action du ressort dérive d'une fonction de force U.
- que les actions de pression sont du type frottement visqueux ce qui doit entraî-
ner l'existence d'une fonction de dissipation $ .
- que les paramètres sont indépendants.
A ce moment les équations de Lagrange ont ainsi la forme particulière
suivante :
A ( 9T \ - .IL + »* _ au _ 0
dt q'.; 9q'. 3q. Wi
Q. étant le coefficient de la puissance virtuelle des forces données qu'on obtient
des équations (2) et (3).
1- Nous avons déjà parlé de la fonction de force U
u = " I (X2~WV2 + cte2- Cherchons la fonction de dissipation
Nous savons que ^.Q = - 3(Pgi 3qf.-
L'équation (10) nous donnait :
«ff * - - SjR (SjX'j - S2x'2) x'* + S2R (SjX', - S2x'2) x *
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 51 -
On a donc : Q = - S 2 R x1 + S S'2R x'2
VW'l -S22RX'2
On a donc :
^-=S12Rx']-SIS2Rx'2
-&- = - S.S,R x' + S 2R x'3x'2 \ .1 \ L *
$ = 4 (Xj, x2)
^-=S12Rx'1-S1S2Rx'2
2X!2donc $ - Sj -i- - SjS2R x'j x'2 + C(x'2)
« ' - S,V x', * 3F; - - W "', * S22" "'2Identifions termes à termes et nous avons
df - = S 2 2 R x l 22 S 2 R x ' 2
, c = !24xi-d'où finalement :
* = I H2 R Xî2 " 2 S1S2R X? 1 X?2 + S22R X22J
3°) Les équations de Lagrange sont donc :
* ^<v -à^-^*^-^,d /_9T v ,. 9T _
dt (^Y^ = ml X 1 "âxY " °
^ - = S 12 R x ' 1 - S 1 S 2 R x ' 2
3U— = -H k (x^X,^,-^)
(V = F^1 e
d'où mx" + S 2 R x' + kx - S S R x' - k (x0-x,+£-£-) = FJ * ' i i z z / l i u e
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 52 -
ou r — ' ~~ ~~~
mx'^ + Sj 2 R x ' j + kXj - SjS2 R x'2 - kx2 = F£ + k (Aj-Ag)
identique à (12-) .
• ~ * < v £<^>-^*i^-^-^A. ( 9T ) = m X" 3T
dt V3xy m2 X 2 9x2 = 0
^ - = S 22 R x ' 2 - S 1 S 2 R x ' ]
JNTT
^ L = - k (x2-x1+£rV
Qx2 = FS
d'où m2xfl2 + S2
2 R x'2 - 8^2 R x f j + k (XJ-XJ+AJ-AQ) - ?e
ou encore
m2 xl?2 + S2 R X '2 + k X2 " S1S2 R X ? 1 " kxi = Fe " k > ( A rV
identique à(l3)
II - VERIFICATION PAR LES THEOREMES GENERAUX
Nous appliquerons successivement le théorème de la somme géométrique
dynamique à (S ) et (S ).
A/ Analyse des actions mécaniques
1°) Appliquées à (S j )
a) Action du ressort ^
Vl - -, u-V j^
FR/1 = k U-£()) $0
FR/, - k (x^x^Jlj-^) $0 (14)
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 53 -
b) Action* dépressions
Nous lfavons calculée précédemment :
FP/I = " SIR (six'i "S2X'2) 'o 05)
c) Actions_exterieures_"donnees"
Le torseur |Tj|est réduit à un vecteur glissant unique
*«•*«*(> 06)
2°) Appliquées a (S2>
a) Action du ressort n n^ u u -*1
FR/7 = ~ k "V ~" FR/1R/2 0 JQ^| R/l
FR/2 = - k (x t,- ) XQ (î/)
^ ££Î2S.Éë-EEê§SÎ2SCalculée précédemment
Fp/2= S2R (SjX', - S2x'2) (wy
c) è£îî2B-ë2EîëEîêHEê.É25SëëLe torseur |T2| se réduit au vecteur glissant unique
Fs = Fs Jo ()
B/ Théorème de la somme géométrique appliqué à (S )
FR/1 +FP/1 + Fe = m. (°1>
->o a° ->° •*J<°,>-fe V(0 1)=x» 1X 0
->•
On obtient donc en projection sur l'axe Xn :
k (x2-xI+irl0) - S]R (Sjx-, - S2x'2) + Fe = m, x»,
et en ordonnant on obtient :
mlx"l + Sl2 R X>1 + 1 " S1S2 R X2" kx2 = Fe * k ( W (20)
qui est évidemment 1féquation[l2]
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 54 -C/ Théorème de la somme géométrique appliqué à (S )
FR/2 + FP/2 +Fs = m2>(02)
>(02)=x»2x0
On obtient donc en projection sur lfaxe x
- k (X2-X]+£]-^) + s2R (S] x'j - S2 x'2) + Fg = m2x''2
et en ordonnant :
m2X2 + S2 R X2 * k X2 " SIS2 Xl ~ l" WV (2l)
identique à (13).
III - EQUATIONS D'EQUILIBRE
A l'équilibre : x = x ; x' = 0 ; x11 = 0
x2 = x2Q ; xV2 = 0 ; x"2 - 0
Appelons F'e - FeQ )) à l'équilibre
F = F )rS SO ;
Reportons dans (20) et (2.1)
kX!0 - ^20 - FeO + k <Wkx2o " teio= Fso " k (£rV
Soit encore
k(x!0-X20) = FeO + k (Jlr£0)
-k(X]0-x20) = FSQ - k Ur*0)
En additionnant on trouve
FeO+FSO=°|(22)
En soustrayant
2 k (x10-x2Q) = FeQ - Fgo + 2 k .(1,-V (23)
Conclusion :
A l'équilibre, seule la somme F n+F n est déterminée et seule la différenceeu î>ux -X- est déterminée. Ce qui veut dire que la pjosition de l'ensemble est arbitraire.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 55 -
IV - MOUVEMENT AUTOUR DE LA POSITION D'EQUILIBRE
Pour étudier ce mouvement on pose
v — Y + Y Y 1 — Y f Y l f — Y11
xl ~ X10 Xl X 1 X 1 x l X 1
«. s Y 4- Y v ' = Y f Y l f — Ylf
X2 X20 X2 X 2 . 2 X 2 ~ X 2
Fe = FeO + fe
FS = FSO * f S
m} X"j + Sj2 R X'j + kX, - SjS2 R X'2 - k X2 = f& (24}
m2 X"2 + S22 R X>2 + kX2 " S1S2 R X'l " k Xl = fS (251
V - ETUDE D'UN CAS PARTICULIER
f est connuU
X = Xj(t) connu
A/ Détermination de X2(t)
L'équation (25) permet cette détermination
m2 XM2 * S22 R Xf2 + kX2 = fS + S1S2 R Xfl(t) + kXl(t) (26^
Equation différentielle du second ordre non homogène à coefficients constants.
Solution connue qui donne X? - X9(t).
B/ Détermination de f
L'équation (24) s'écrit
inj X' t) t S R Xj.(t) -H k Xj(t) - SjS2 R X'2(t) - k X2(t) = fe (27)
Puisque X2(t) est connu, cette équation détermine f .
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
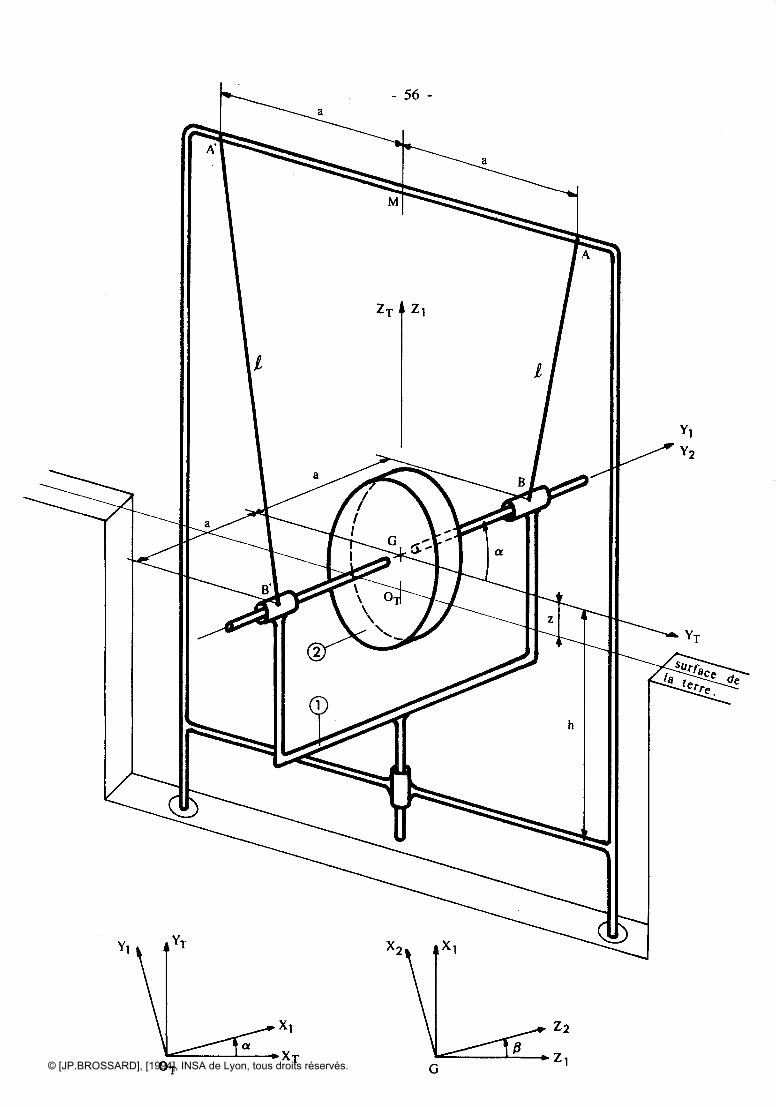
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 57 -
DISPOSITIF BIFILAIRE POUR METTRE
EN EVIDENCE LA ROTATION TERRESTRE
ENONCE
I.- DESCRIPTION DU REPERAGE TERRESTRE (Figure 1)- » • - > - > •
Soit 0 le centre de la terre. On désigne par R : I 0 , X , Y , Z ung g L g g g gj
repère galiléen tel que->•Z porté par l'axe terrestre dans le sens nord-sud->X arbitraire dans le plan équatorial- » • - > - > -Y - Z A Xg g g
* i- •** -** •** TOn désigne par R : [ 0 , X Y , Z J un repère lié à la terre tel que
-Ne -*ZT = ZT-NeX-, arbitraire dans le plan équatorial-KU ->* ->-i-Y T = Z T A X T
4fOn repère la rotation de RT/R par l'angle fy tel que
* = <« . X )o fp
est la vitesse angulaire de la terre que l'on supposera constante, et on posera
*f - a)
Soit un point 0 à la surface de la terre dans le plan (0 , x!! Z*). Parl g x T
0 passe le méridien et la parallèle au lieu.
On désigne par RT £OT> X, , Y , Z ] un repère local lié à la terre tel que-»•Z porté par la verticale du lieu (sens ascendant)-»•X_ porté par le méridien du lieu (dirigé au sud)
YT = ZT A^ (donc YT = Y*)
On repère la rotation de Rm/Rj Par l'angle <)>
4 = (ZT, Z ) (((> est la colatitude = cte)
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 58 -
II - DESCRIPTION DU SYSTEME UTILISE (Figure 2)
Le dispositif est constitué par deux solides (S ) et (S9). (S ) est
une fourche de masse négligeable articulée par rapport à la terre au moyen d'une->•
liaison verrou parfaite d'axe Z . Cette fourche est d'autre part suspendue dans
le laboratoire terrestre par deux fils BA et B'A' de masse négligeable. Donc le->
solide (S ) peut tourner par rapport à la terre autour de Z et se déplacer! . •*•dans la direction de Z .
(S?) est un rotor de masse M articulé sur (S ) au moyen d'une liaison rotoï-
de parfaite d'axe perpendiculaire à Z . Le centre d'inertie G de ce rotor est sur
l'axe de la liaison rotoïde.- » . - > • - > .
- A (S ) on lie le repère R : £G, X , Y , Z J tel que-v ->•
!!= ZTY porté par l'axe de la liaison (S )/(S ) sens positif de G vers B• - > • - > • - » •xi = Yi A zi
On repère la positionne G par 0 G * z Z- » • - » •
On repère la rotation de R./IL, par l'angle a = (X , X )- > • - > - > n
- A (S2) on lie le repère R2 : [*G, X2, YZ, Z2 J tel que-> ->Y = YX2 M->X? arbitraire
Z2 = X2 A Y2-> ->•
On repère la rotation de R2/R par l'angle 3 = (Z , Z )
On admettra finalement que l'attraction exercée par la terre est représen--> ->
table par un torseur assimilable à un vecteur glissant unique A = - MG Z passant
par le point G.
Par la méthode de Lagrange, retrouver les équations du mouvement obtenues
à l'aide des théorèmes généraux au chapitre. 6 exercices(page 63l
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 5 9 -
SOLUTION
I - RAPPEL SUR LE SYSTEME
* 3 paramètres décrivent le mouvement de (S )U(S ). Ce sont a, 3 et z.
Mais cette fois ils ne sont pas indépendants. Nous avons une relation de liaison
holonome z = f(a). Plus explicitement :
z2 - 2 z£ + 2 a2 (1 - cos a) = 0 )
2 2 2 a } O)soit z = Jl -\/~le avec k = )l - 4 a sin -r- )
* 2 méthodes sont alors envisageables pour écrire les équations du mouve-
ment de (S )U(S ).
A/ La réduction au nombre minimum de paramètres;c'est-à-dire exprimer des
paramètres en fonction des 2 autres à l'aide de l'équation de liaison. Nous aurons
donc 2 paramètres indépendants et utiliserons la méthode de Lagrange à paramètres
indépendants.
B/ Ne pas réduire au nombre minimum de paramètres et donc considérer ceux-ci
comme dépendants et utiliser la méthode de Lagrange avec multiplicateurs.
II "" CALCUL DE L'ENERGIE CINETIQUE DU SYSTEME
T8 = Tj8 + T28
* Tj 8 « 0 négligeable comparé à T 8
. l 2 s , l M [ v s < G > ] 2+ i y^y
A/ Calcul de Vg(G)
•>c -*T ->• eV8(G) = V"(G) + VT
g(G)
a/ ^(6) = z' ZT
b/ VT8(G) = VT
g(0T) + fiT8 A Ô^G
VTg(0T) = VT
8(Og) + nT8 A Ô^OT
V g(0 ) = 0o
VTg(G) = nT
g A 5^0T + nTg A Ô^G
vT8(G) = nT
g A Ô*G
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
- 60 -
fl| « ï>' ZT* « *f (-sin<j> X + cos cj) Z )
5 G - R ZT -H z ZT - (R + z) ZT
donc : ,. . - r n-sinj) 0 0
Vg(G) - $' 0 A 0 - *f (R+2)sin.(()
^cbs <f>_ [R + z_ 0 IL,
Par conséquent :
r° i r °V8(G) = 0 + if/(R+z) sincf) $f » w = const.
«i n rotation terrestre-. J P ^ n"-- JRT L JRr
j" o
V8(G) = o)(R+z) sin<()
- z ' JR^B/ Calcul de fl2
8
-»• g ->•! -> T -> B^2g - fi2 + Q j 1 + g
= 6 f Y j -H a' Z j + *' ZT*
-sin *
SJ - w 0
. COS (f) JP^
cos a sin a 0 - o) sin <£] F- w sin <(> cos a"
S° = -sin a cos a 0 . 0 = œ sin 4 sin a
0 0 ^ . L ^ cos $ ^ cos <f) R1 ]
- a) sin 4» cos a
"2 - • 31 + a) sin 4 sin a
af + ça cos <|> RiC/ Matrice d'inertie en G du rotor
[B 0 0"IG = 0 A 0
rotor LU 0 BJ
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 61 -
D/ On a donc finalement :
Tg = 4- M z '2 + u> (R+z)2 sin2<() + -7 B ai sin <)> cos a2 L J 2 (2)
1 2 1 2+ ~ A ($' + ça sin <f> sin a) + y B (a1 + a) cos cj>)
III - PUISSANCE VIRTUELLE DEVELOPPEE PAR LES ACTIONS MECANIQUES APPLIQUEES
AU SYSTEME (S])U(S2)
Nous sommes ici dans le cas suivant :Cfî*
- solides parfaits / , . = 0^ cohésion
//D* £/5*- liaisons parfaites / +J = 0
6ftkSi on désigne par^y la puissance virtuelle développée par toutes les actions
mécaniques on aura donc ici :
tf>* Cf±V "J D
Les actions données sont les actions de gravitation qui dérivent d'une fonction
de force TTU « - mGz
Y* ou „ .*et on a donc <y _ = -7— = - mGzD QT
Cfî* *Donc <7 « - mGz1 (3)
Remarque : Cette puissance virtuelle est développée dans une transformation vir-
tuelle compatible avec les liaisons telles qu'elles existent à l'instant t,
c'est-à-dire qui vérifient l'équation de liaison
z + 2 z£ + 2 a2 (1 - cos a) = 0
Les vitesses virtuelles compatibles vérifient l'équation
2 zz'* - 2 £zf* + 2 a2 sin aa'* - 0
2 (z - Jl) z'* + 2 a2 sinaa'* - 0 (4)
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 62 -
IV - 1ère METHODE ; EQUATIONS DE LAGRANGE AVEC REDUCTION AU NOMBRE MINIMUM DE
PARAMETRES
Suivant la forme de l'équation de liaison, nous avons directement exprimé
le paramètre z en fonction de
z « 6-\/k
, 02 . 2 . 2 ak = £ - 4 a sin y
2kf = - 2 a sin aa1
k" = - 2 a2 (sin a a" + cos a a'2)
. 3k 0 2 .^ 8 -_ « - 2 a sin aa 3ag . . 7 *Nous allons exprimer T ainsi que la puissance virtuel le Jy en termes uniquement
de a et g. Pour cela nous calculons :, i t 2 •. 1 kf a sin a .
zt = _ — = a»2 - V14 2,2 a sin a .2
* k a
On obtient donc de nouvelles expressions pour T et <J
Tg - 1 M F &4 "in2a a'2 + a,2 (R + £ - V )2 sin2J + I B a)2 sin2<t, cos2a^ L J Z (5)
+ - A (£' + ai sin <|) sin a) + j B (a1 + a> cos <)>)
et venant de l'équation (5) nous avons :
9 0/*>* M/- a sin a ,* M G a sin a ,,.^ = - MG a1 -» Q = — (6)
Vk \/k
A/ Equation ç>&($)
_d_ . 3T _ JT _dt ^38'; 33
H-° * é<^->-°i
3T3B^= Cte
iA(3? + œ sin <)> sin a) = cte
-> I g f + a) sin <j) sin a = q (7)
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 63 -
B/ Equation °o (g)
JL (Jï,) - 11 - Qdt V3a' 8a xa
8T. = 1 M (2 a4 sin2a) „, + B (a, + u cos +)
oOt Z K
Jg..[ «.**!&..]...,„„,.,
d , 3T v /M a4 s in2 g . „ , f 2 M a sin g cos g k g' - M a sin g k y]_ (_j . ( _ + B ; g + g ^ ^2 J
f /2 a sin a cos a k - a sin a k Yl 2 M a ) (R+£- 1/k) sin <f) k^
^ • 2 M L a ' \ ? vJ" ^c2 2 2 2- -r- B a) sin <j> cos a sin a + -5- A (g1 -H w sin ((> sin a) CD sin <j> cos a
3T M a4 sin a ,, 2 . 2 x ,2 2 Ma2 çq sin 4» (R+£- Vk) sin a-— « = (k cos a + a sin a) a1 + T
9a k2 2\/îT
2 . 2- B a) sin <f> sin a cos a + A (3? + a) sin <|> sin a) a) sin <f> cos a
2n M G a sin a
« ~ V^On obtient donc :
4 2 4/M a sin a . B N „ , M a sin a ,. 2 . 2 x ,2( r + B) a" •*• s (k cos a + a sin a) a f
k k2
M a2 a)2 sin2(() sin a (R+£~Vk) n 2 . 2^ . / O Nj; + g QJ sin Q sin a cos a (8)
*- A a) sin (j). cos a (B f + a) sin <j> sin a) -f —2—sin a = 0
V^2 2En utilisant (7) dans (8) on obtient en se rappelant que g = G - co (R+z) sin <f>
(Chap. 6 BX. p.72) ;
,M a sin a N „ M a sin a /f 2 . 2 N ,2( r— ) a" + r (k cos a + a sin a) a1
R k2
2 . 2+ B a) sin <J> sin a cos a (9)
a2 sin- A GO sin <|> cos a . q + Mg — = 0
^avec k = £ - 4 a sin ~
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 64 -
V - METHODE DE LAGRANGE AVEC MULTIPLICATEUR
On considère ici les paramètres dépendants et l'énergie cinétique sera
donc donnée par l'équation (2).
La puissance virtuelle des actions de gravitation sera donnée par (3).
Les puissances virtuelles sont telles que l'équation (4) soit vérifiée.
A/ Equation oU (g)
* r JL) - il - odt SB1' 36
8T n 3T- - 0 + w - cte
6f + oî sin •<)) s in a = q (10)
B/ Equationoc? (q)
d , 3T N 3T 0 . 2 .._ (..—.) - ._ - 2 A a sin adt 3af Sa
9T—-Y" = B (a? + w cos *)oCX
— r 3T t = R ra"dt (9a'J B a
3T 2 2•r— = A ça sin <j> cos a (3' + tu sin $ sin a) - B ça sin <j> sin a cos aoCX
donc : q
2 2 2B a" - A CD q sin <f> cos a + B ça sin <|> sin a cos a = 2 X a sin a (11)
C/ Equation oo(z)
à & -1 - -œ * 2 A "-«
3F (^} ' «""
9T 2 2•T— = M a) (R+z) sin cf>oZ
Mz" - Mca2(R^)sln $ = - Mg + 2 X (z-£) (12)
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
- 65 -
D/ Elimination du multiplicateur X :
L'équation (12) donne X
- Mz" - Mo)2 (R+z) sin2<() + MG ,}^
2 (z-£)
2 2Sachant que g = G - u> (R+z) s in <j>
-f-£?Nous connaissons z-£ par l'équation de liaison (1)
z - £ = - \fk
Nous avons donc aussi :
,,. . . 1 TJEI - *'2 12 L ^ 2 k \ / k - l
En remplaçant dans (14) on a :
™ ^ M , k f l k'2 ,- Mg + - (— )x m Vk 2 k Vk
2Vk
On remplace cette valeur dans (11) pour obtenir :
2 . 2Balf - A a) q sin c|) cos a + B .jw sin c() sin a cos a =
M a2 sin a / k f f _ k'2 1 M g a2 sin a
2 Jk I p : 2 k\[k I J/k
ou encore :
Bafl - A a) q sin <(> cos a + B a) sin <f> sin a cos a — j—r
r ~î 2 A 2 2 22 a2 (sin a a" + cos aa'2) -H Ma sinq ..4 a4 sin q g' + Mga sina = Q
L J 4 k2 Vk
4 2 4,Ma sin a _ N „ Ma sin a ,, ^ 2 . 2 N ,2( r + B) a" + 5 (k cos a + a sin a) a
k2 2
+ B co sin <j> sin a cos a (16)
A • Mga sin a- A a) q sin <j> cos a + -=B = 0
\P .
i n2 y 2 . 2 aavec k = £ - 4 a sin —
qui est bien la même équation que (9).
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
- 66 -
VI - CONCLUSION
On retrouve bien l'équation du mouvement en a de la page 74 du chapitre
6 ex.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
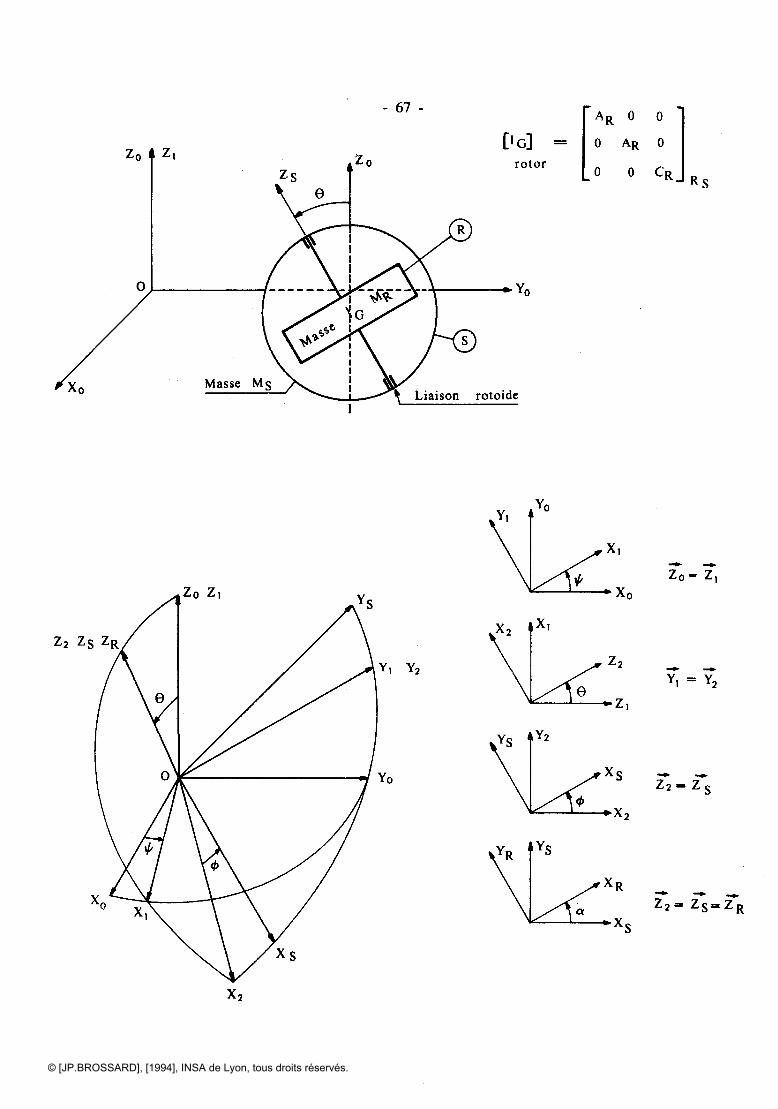
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 68 -
EQUATION DU MOUVEMENT DE LA SPHERE DE BOBYLEV
ENONCE
Un système (figure 1) est constitué de deux solides (S) et (R). Le solide
(S) est une enveloppe sphérique homogène de faible épaisseur et de rayon a. On
désigne par Cc le moment d'inertie de cette enveloppe sphérique par rapport à l'unbde ses diamètres et par M sa masse. Le solide (R) est un rotor, corps homogène de
b
révolution monté dans (S) de telle manière que la liaison (S)/(R) soit une liaison
rotoïde parfaite, l'axe de révolution de (R) coïncidant avec un diamètre de (S),
cet axe commun étant l'axe de la liaison rotoïde. Les deux solides ont pour centre
d'inertie commun le centre G de (S). La sphère (S) est en contact en I avec le->• -> - > • - > • - » • -*
plan (0, XQ, Y ) d'un repère galiléen (0, X , YQ, Z ), Z étant vertical ascendant.
A (S) on lie le repère Rg : [ G, Xg, Yg, Zg] tel que•+Z porté par l'axe de la liaison (S)/(R)D
->
XQ arbitraireo
W*s_On repère G par OG = (Jx, y, a ] RO et l'orientation de (R )/(R ) par i|;f 6 ,
<f) qui ne sont pas les angles d'Euler habituels mais définis de la manière suivante :->• ->• -> ->•
Le plan (G, Zn, Z ) coupe le plan (G, X , Y ) suivant une droite que± (J o j- U _^U _^ _^ -|
l'on oriente OX arbitraire. On construit (R ) : G, X , Y , Z tel que
'' = '°W5iOn repère la rotation de (R )/(R ) par :
* - (XQ, X,)
On construit (R2> : [G, X£, Y£, Z£] tel que
-+ -»•7 = 7L2 ZS-> ->
Y2 = Y1
X 2 = Y 2 A Z 2
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 69 -
On repère la rotation de (R )/(R ) par :
6 = (Zj, Z2)
Enfin on repère la rotation de (R )/(R ) par :
* - <v VA (R) on lie le repère ) : G, X YR, ZR] tel que
•+ -K
ZR ' ZS->
X-, arbitraire\R.
\ = Z R A \
On repère la rotation de (ILJ/(R ) par :
a = (Xg, y
La matrice d'inertie du rotor est :
-AR ° °I G = ° ^ °
L O « SJRS
La masse de (R) est désignée par VL; on pourra poser pour abréger
l'écriture :M = MR + Ms
CS = C
A = A R + C S
r = ((>' + i{;? cos 6 (r n'est pas constant)
K = C (<j)' -H ip' cos <f> + a')JK.
Retrouver les équations du mouvement obtenues au moyen des théorèmes
généraux dans le chapitre 6 exercices p.147.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 70 -
SOLUTION
I - RAPPELS SUR LE SYSTEME
Les équations du mouvement du système sont obtenues de la manière suivante :
A/ Repérage du système
(Rn)~ repère galiléen fixe origine 0
(RC)~ repère lié à la sphère origine Gb s
- coordonnées de G dans(Rn) ; 3 paramètres x, y5z
- orientation de(RJ/$l ) :
3 angles d'Euler type II : if;, 6, <j>
(R_) repère lié au rotor
rotation de(Rj/(jO-* 1 paramètre <*
Nombre total de paramètres : 7
B/ Equations de liaisons
Tous ces paramètres ne sont pas indépendants.
- liaison holonome
elle est de type géométrique et exprime que la distance G au plan
(xnYn)est constante
z = a 1 équation
- liaison non holonome
expression de l'hypothèse de roulement sans glissement en I-»•V°(I) a deux composantes dans le plan (XAYn)b U U
-»-V°(I) = 0 donne 2 équationsb
x f cos fy + y1 sin ty - a 6 f = 0 ^
- x1 sin ip + y1 cos ip + a ( f ) f sin 0 = 0 A
C/ Degré de liberté k
k = 7 - 3 = 4
D/ Nombre minimum de paramètres
On a une seule équation de liaison holonome. On peut donc exprimer un seul
paramètre en fonction des autres. Le nombre minimum de paramètres nécessaire à la
description de ce système est 7-1 = 6.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 71 -
E/ Equations du mouvement
Le mouvement nous sera donné par des relations différentielles uniquement
entre les paramètres angulaires>, 6, <f> et a. Il nous faut quatre relations ce qui es
bien confirmé par le degré de liberté.
II - CALCUL DE L'ENERGIE CINETIQUE DU SYSTEME
T° = T* + T°
T; = IMS tnG)]24^.îGs . S; ; ^-~ï\faf+^i\*i
T°s = IMs (x'2 * y f 2 ) * ïcs[y2 sin2e + e '2 + (*? + *' cos e)2]
TR = J\ (X '2 * y|2) * llXl *'2 Sin2e * \ 6 '2 * CR (^ f C°S 6 + *' + a f ) J
T ° = i (MR * V (x'2 + y|2) + î T(cs+V *'2 sîn20 + (Vcs} 0 f 2 * cs (* f^ t cose)2
+ C (i^f cos 0 + c|> f + a')l
T° = 1 M (x t 2 + y'2) + | FA (ij; f2 sin20 + 0'2) + Cg (<(> ' -H ^' cos 0)2
+ CR (<j)f + i(;f cos 6 + a ffl
On a ici utilisé l'équation de liaison holonome.
z = a ->• zf * 0
Cette procédure ne serait pas valable pour des liaisons non holonomes.
III - CALCUL DE LA FONCTION DE FORCE
On a immédiatement U = Cte I
IV - VITESSES VIRTUELLES COMPATIBLES
xf cos ty + yf sin - a0' = 0
- xf sin ty •*• y1 cos \j) •«• a <j>f sin 8 = 0
Les vitesses virtuelles compatibles sont donc définies par£ £ &
x f cos ty + y1 sin ip - a6 f = 0^ îlf îfc
- x! sin if + y f cos $ + a<|>f sin 0 = 0
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 72 -
V - EQUATIONS DE LAGRANGE
2 équations de liaison non holonomes.
6 paramètres nécessaires à la description du système.
Equations de Lagrange avec multiplicateurs
JL ( 8T ^ JL = JH + ?dt %'/ " 9q£ 3q. j-1- j aj i
Ici i « 1 à 6 j « 1 à .2
A/ Equation oC:(x)
d f 3T v 3T _ au . . , .dF ("3lr) " al " aï * xï aix * X2 a2x
On obtient :
Mxtf = X. cos \p - X2 sin i(;
B/ Equation (y)
De la même façon
My" = X sin ty + X cos ty
Cl Equation oC(a)
d , 3T , 8T 3U A . . ,dF (^T) " 3â = + X l ala + X2 a2a
f i t0 0 0
On a :
C_ Oji1 cos 6 •*• 4 f •«• a f ) = cte = KK.
D/ Equation (yfc<j))
d x 3T , JT 8Udt S<f> t ; " a * " a * A i aic() A2 %
t f0 a sin 0
£T•~T - Cg (*' + ^' cos 0) -f CR (i(;f cos 6 + <|> f + a1)
= Cr+ K
On a donc :
~r (Cr + K) = X0 a sin 0dt 2
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 73 -
E/ Equation oC (i|Q-
d , 3T , 9T _ 3UdE (3fr) " "5* " 8* Àl % X2-a2»
t t0 0
- L = AI/;' sin26 + C0 ((()f + ij;' cos 0) cos 0 + CL. (cj>f + i|>' cos 6 + af)cos 0
dlp o K
-j|- Ai|/' sin20 + [c ( < j > f + i j^ f cos 0) + K] cos 8 = 0
D'où l'intégrale première :
2Aip' sin 0 + (Cr + K) cos 0 = cte
F/ EquationpC^
d ( 3T , 8T _ 3U ' .dt AaFr; " "a? " a? A i a i0 À2 a20
i i-a 0
# - «• » ^ <^> • *••9T 2—- = Ai^f sin 0 cos 0 - C ( < f r f + if1 cos 0) \j;f sin 0 - C_ (c))1^' cos 0 + a ' )^ f sin 090 R
d'où
A0" - A^1 sin 8 cos 0 •*• (Cr + K) i|>' sin 0 = - X a
H/ Récapitulation
(1) MX" = X cos ty - \ sin
(2) My" » X sin if; + X cos ij;
(3) K = constante
(4) (Cr+K) = X2 a sin 0
2(5) Ai|;' sin 0 + (Cr+K) cos 0 « constante
2(6) A8" - A if;1 sin 0 cos 0 + (Cr+K)iJ;' sin 0 = - X a
avec r - ()>' + i(;' cos 0
K - Cp (r + a')s\ ~ .
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 74 -
On a donc :
(6 équations de Lagrangeéquations i & &
( 2 équations de liaison non holonomessolution possible
!
6 paramètres x, y, a, é, ty, 0r
2 multiplicateurs X , \~
I/ Elimination des multiplicateurs
On veut exprimer \ et X9 en fonction des 6 autres paramètres.
Immédiatement de (1) et (2) on a :
X = M (x" cos ty + y" sin i|0
\ = M (y" cos ty - xfl sin 1);)
Cependant on voudrait les équations intrinsèques du mouvement, c'est-
à-dire ne dépendant pas du repère. On veut donc avoir les 4 équations ne dépendant
que des paramètres angulaires. Essayons alors d'exprimer X et \ en fonction des
variables angulaires.
En utilisant les équations de liaison et en les dérivant par rapport
au temps on obtient :
x" cos i|> + y" sin + ' (- xf sin ty 4- y1 cos ) - aé" = 0
-x" sin ty + yf! cos ty - ' (xf cos ty + yf sin ) -H a<f>lf sin 6 + atjï'e' cos 0 = 0
soit encore
x" cos ty + y11 sin i); + aij;f<f>f sin 0 - a0lf = 0
-xft sin ty + yf! cos \l> - aip'0' + ac()!! sin 0 + a(j)'0' cos 0 = 0
On a donc immédiatement
X =-Ma ( '<()f sin 0 - 0")
X = - Ma (4)fl sin 0+c() î0 fcos0-\(; f0 f)
Si l'on consulte la page 157 du chapitre 6 exercices, on s'aperçoit que
Xl = XOS
X2 = YOS- ; . ->
X 0 et Y étant les composantes de l'action F du sol sur la sphère.Ub Ub Ub
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
- 75 -
J/ Equations du mouvement
Si l'on élimine X et A des équations (4) et (6) on obtient donc 4 équa-
tions du mouvement ne comprenant que les 4 variables angulaires a, ^, 9, <f> qui
sont ; ! __________________«-_-^^
K = cte
- (Cr + K) = - Ma2 (<J>!! sin20 + <(>fef sin 0 cos 6 - i|;fe.f sin 0)
oAi^! sin 0 + (Cr+K) cos 0 = cte
A0" - Ai(;f2 sin 0. cos 0 + (Cr+K) i(;f sin 0 = - Ma2 (0fl - 'cf)1 sin 0)
Ces équations sont bien identiques à celles obtenues par les théorèmes
généraux.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

, 77 -
MOUVEMENT D'UN VEHICULE ARTICULE
MISE EN EQUATION PAR LA METHODE DE LAGRANGE
ENONCE
Le système représenté sur la figure est un engin de travaux publics dont
la direction est assurée à l'aide de deux vérins hydrauliques reliant B à B et
B à B . Le système est essentiellement formé de 6 solides (S ), (S ), (S«), (s/.)|(5s /
(S-). La liaison (S2)/(S ) est une liaison rotoïde parfaite d'axe Z = Z?. Les
roues (S ), (S ), (S_), (S,) de rayon commun R, de masse m, du véhicule, sont en•* D O ^ _^
contact avec un plan horizontal (0, XQ, YQ) d'un repère(R )en I , I , I , I et
il y a roulement sans glissement. Le véhicule est construit de manière que l'axe
de liaison rotoïde soit perpendiculaire au plan horizontal, c'est-à-dire que• > • - * • • - * •Zl = Z2 = V
-»• -* ~* / -> -* 4
- A (Sj) on lie (R : (0, X^ Y]f Z^. Le plân^Oj, T J f Zjjest plan de
symétrie du véhicule et coupe l'essieu avant en son milieu C . On a O C * a Y
(a > 0). SoiiwtA et A^lfts intersections de l'essieu avec le plan médian des roues.
On a A2AJ = 2 b X .
On repère le mouvement de'(Rj/jk )-par :
00j = [x, y, R] RQ
*i = % V- A (S2) on lie (R2> : (02> X2, YZ,. Z£) : 0£ s 0J , Z2 = Z} et le plan
(°2> Y2» z2)Plan de symétrie de (S2> coupe l'essieu arrière en son milieu C^, tel
que Q2C2 « - a (a2 > 0). Soient A^ et A ks intersections de l'essieu avec le
plan médian des roues. On a A.A * 2 b X?.
On repère le mouvement de (RJ/CFL) par :
' 002 = |if y, R] RQ
*2V(V V
A chaque roue on lie un repère dont l'axe des X est porté par l'axe de l'essieu
correspondant. On repère les rotations respectivement pour les roues (S ), (S ),
(S5), (S6) par +I - (Yr Y^, = (Y, ,* Y^, = ' (T T..) et - (Y f Y !
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 78 -
Les éléments d'inertie pour chacun des solides sont les suivants :
- solide(S ) : masse M , centre d'inertie G tel que 0 G = £d, £ , h }
A -F ~E~r i ' ] lMatrice d'inertie I_ = -F, B, -D,
L G1J ' ' '
L-Ei -D. VR,
- solide(S ) : mêmes éléments avec l'indice (2).
Solides (S£) pour i = 3, 4, 5, 6.
masse m, centre d'inertie A,
fi 0 0"
Matrice d'inertie I = 0 B 0
LO o oj^
On admettra que le système de commande de la direction est tel qu'il
exerce un torseur +f 2 1 = o
T2l +
M21(Qj) = + kd ( j - 2) Zj
En outre les actions mécaniques extérieures, agissant sur (S ) sont
représentées par le torseur :
F = [X, Y, Z] RO
GX M(0,) -[L. M, N]R()
1°) Ecrire les relations de roulement sans glissement en I , I , I , I . Montrer
qu'il y a seulement 6 relations non holonomes indépendantes (on conseille d'utili-
ser repsectivement les repères (R ) et (IO).
2°) Calculer l'énergie cinétique du systme T°.
3°) Calculer la puissance virtuelle développée par toutes les actions mécaniques.
4°) Ecrire les équations de Lagrange avec multiplicateurs.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 79 -
SOLUTION I
Ecrivons au préalable les matrices de passage
'" XQ " cos ty - sin ty 0 X
YO = sin ty • cos ty 0 Y
.zcJ L ° ° » J Lv
" X o l FCOS *2 • S in*2 0 r x 2 '
YQ = sin ty cos i|>2 0 Y2
. z 0 J L ° ° » U2.I - RELATIONS DE ROULEMENT SANS GLISSEMENT EN I}, ï^ 1^, ï^
A/ Roue(S3)
S'il y a roulement sans glissement en I on doit avoir :
^l (Ij) - 0
' V j ' d , ) = v° (AJ) + nj. A ' Â ^ I J
V| (Aj) = V ^(A,) •+ V| (Aj)
V ^ ( A j ) = 0 + V° (Aj) - V* (Aj)
V° (Aj) = V° (Oj ) + A ÔjTj
->• ,o • r x1
V° ( Ô ) - 5_ (00 ) = y'" L 0 RQ
-v» __ r ° i r b i r - ai M "^j A O j A j = 0 A a} b i|)^
U J . , L O ] E I L « JR]cos i(; sin ip 0* x1 "x'cos ip + y f sin i|> "
VI (0.) = - sin ty cos ip 0 y' « -xf sin ty + y f cos if;
0 0 1 J LU J •; 0 JR
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 80 -
Donc : ' "
x' cos ty + y1 sin \l> - a. i f i ' .
V° (Aj) = -x1 sin ^ + y1 cos i^ + b $'} = (A j )
L 0 JR ]
+ „ + 1 +°n° = n, + fi.o j i r, t *-»• +. *i '
- *{ X j + <ij Z j - 0
hJRlVi = - R fi
k* i r oi r o"î A À j l j = 0 A 0 - R <(.'
L^î J rRJ L ° JR, R j R,
Finalement :x1 cos ty + y1 sin ty - a ij>'
_>. l 1 1 1V° ( I j ) = - x1 sin ^ j + y' cos ^ j + b ^ ' j + R « ( . ' j
0 - J RI
Les relations de roulement sans glissement pour la roue (S ) s'écrivent donc :
xf cos ty + y1 sin ty - a i/;1 = 0 (1)
- xf sin i(j + yf cos ty + b i|;f + R <)>f = 0 (2)
B/ Roue (S4)
II suffit dans les opérations précédentes de changer b en -b et <j>f en <f>f .
On obtient donc :
xf cos -H y1 sin.ij; - a i(;f = 0 (3)
- x f sin ij; + y f cos i); - b -î|;f + R ( f > f2 = 0 (4)
C/ Roue (S )
II suffit dans les expressions (1) et (2) de changer a en -a? , c()f
en <j>!3 et ^j en .
xf cos i|;2 + y1 sin i|>2 + a£ ip
f2 = 0 (5)
- x1 sin i|;2 + yf cos i|;2 + b '2 + R cf)f3 = 0 (6)
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- *1 -
D/ Roue S,D
II suffit de changer dans (5) et (6), b en -b et <J> f en <f>f :
xf cos $2 + y1 sin + a2 '2
= ° (7)
-xf sin 2 + y1 cos 2 - b T(;
f2 + R <j)
f4 = 0 (8)
Les équations (1) et (3) sont identiques ainsi que (5) et (7). Il reste donc
6 équations non holonomes indépendantes qui sont :
xf cos ty + y1 sin iK - a -, ^f . = 0 I
-xf sin iK + Y1 cos \|; + b ij;1 + R <f>f = 0 II
- xf sin ty +y 1 cos ty - b $r + R <f>f = 0 III
xf cos $2 + y'1 sin *2 '+ a2 *f-2 = ° IV
-x1 sin $2 + y1 cos 2 + b i|;f + R <(>f = 0 V
-xf sin $2 + y1 cos i|;2 - b i|;
f2 •+ R <(>' = 0 VI
II - ENERGIE CINETIQUE DU SYSTEME
T° = T0) + T°(2) + T°(3) + T°(4) + T°(5) + T°(6)
A/T(i)-îMi[F(Gi>]24 «;• V*;V°(G,) - V0(0j) + n] A ôjGj
~ X '"~*"oV (0 ) = y' calculée précédemment
L°>o^o .__ r°i r°i ""£ i4 ) t i i r -^ , *•, cos4 / j "0, A O j G j = 0 A £ j - . 0 = - A j ^ ' j S i n i J . j
Li't1JR] UJRj L o JR] L ° -kF x' - «,^ ' j cos i j / j "
v ° (Gj ) - y' - £ j i f i ' j sin i^ j
L o J R O
r i [AI ~FI "EI! PI"î • IG, • = [0> °' * ' i jR "FI B1 "Di ° ' xi *'î
1 K -°i ^U'J^
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 82 -
donc
(9) T* = |fM, (x'2 + y'2 + £,2 H>\2 - 2 1.x1*1,. cos ij, - 2 £ y1*1 sini|O + I 4- '] Ii u ^ L * * * i l i 1 1 i j Ui
B/ On obtient T°2\ en changeant :
Ml * M2
£1 --*2
I -* I On obtient :
*1 - *2
(10) T°(2) =l[M2 (x'2 + y'2 +llrf - 2t2 x' cos^,, -2£2y'j2 *™ V2> + ^ ]
c/T-^-i.^).]2*!^ ï A j a ;
"" x f cos i(; •«• y f sin ty - a i(;f
_^. 1 1 1 1V°(A ) = -xf sin tf; + y1 cos ty + b if;1
L o JR]
——^ o o o
[V°(A )] = x f + y1 - 2 x f i|;f (a cos i|; + b sin ifr )1 1 1 1 9 9 9
- 2 y' i|;f (a- sin ty - b cos i^^ -»• i j /J (a^ + b )
"i o oi r^ i^3 ^A ^3 "[*fr °» -*1]! 0 B 0 0. = I -H B if^2
[o 0 B j R j L*1 J
d'où :
1 F" 9 9T?^ = T m l x ' + y ? '" 2 x f ^ f i (ai cos^,^ b sin* ) - 2 y1*1 (a sin* - b cos* )
( 11 ) (3) L 2 2 2 i 2 2l+ *;Z (a^ + b Z ) ( - H I *p -H B *pj
D/ Pour T° v on change b en -b et (j)1 en ^ dans (11 ) :
i r 2 2T(4) " 2" m i x' * y? " 2 x^Jfa j 0 0 8 *! - b sin*^) - 2 y1*^ (a} sin*j •+ b cos*^
(12) 2 2 2 i 2 2l+ U-p (a,Z + b^) ( + I + B *pj
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 83 -
E/ Pour T° on change a en -a^ , <|> ' en <t> ' , en i|>
T(5) = Y I m :JX '2 + y '2 " 2 x l**2 (~a2 C08*2 + b sin^2) ~ 2 y'*'2 (~S2 sin*2~b cos^
(13) + *22 ( a 2
2+ b 2 ) ] + I ^ 2 + B,2
2]
F/ Pour T° on change b en -b et <|> f en <|> f dans (13) :
Tr^ " 7 I m | x f 2 H- y'2 - 2 x f ^ !9 (-a cog^ - b sin^0) - 2 yfi(;f
0(-a0sini^ +b cos i|On / x (6) 2 L ( 2 2 2 2 2 2 2 2v ' ? 2 9 i ? ?T
+ ^Z (a^ + !/)]+ I «f,^ + B J
Pour les 4 roues on aura :
T°(3J + T°(4) + T°(5) + T°(6) = î m [4 (X'2 + y'2) + 2 (ai+l>2) *i2 + 2 (a2+b2)
- 4 x1 V j & j cosipj + 4 x' ip'2 a2 cos 2
- 4 7 ' ^ ^ 3j sin t j + 4y' ^'2 &2 sin ,|,2
+ 71 <*;2 + ^2 + 2 + 2)+ ± \2 B i|,j2 + 2 B 21
Finalement l'énergie cinétique totale s'écrit :M M
T° *> -i ((MJ" + M2 +~4 m) x'2 +(MJ + M£ + 4 m) y'
2
*- ^ ^ ^ J|
+ (Ij + Mj Jlj2 + 2 m (aj2 + b2) + 2 B)t ]2
+ (I + M £ 2 + 2 m (a 2 + b2) + 2 B) !2
v^ z -f i»_ ^ l
J2
+ i c*;2 + 2 + < 2 + 2)KI K2
- 2 x' *', (2 maj + M ") cos >j + 2 x' ,J,'2 (2 ma2 + M2&2) cos 2
- 2 y' t|>', (2 maj + M^j) sin } + 2 y' . (2 ma2 + M2£2> sin 1
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 84 -
soit encore :
T° = y JM (x'2 + y'2) + J] ,j,|2 + J2 ^2 + I ($j2 + <fr2'2 + <^2 + $J2)
- 2 K j x' i f i ' j cos i|)j + 2 K2 x' t j j '2 cos
- 2 K j y1 i f » ' , s in>j + 2 K2 y' t|»'2 sin ^ J
avec M = M + M + 4 m
J - I j + M j i l j 2 + 2 m (aj2+b2) + 2 B
J2 = I2 + M2£22 + 2 m (a2
2+b2) + 2 B
K = 2 m a + M £
K2 = 2 m a2 + M^
III - PUISSANCE VIRTUELLE DES ACTIONS MECANIQUES
A/ Puissance virtuelle développée par le torseur de direction !„
T *" = °21 + 2
M21(0j) = + kd (*j - *2) Z,
* - «2, • "2*
*i-*;-*;->1* , .* .*.«2 = (^2 ~ *! } Zl
^ = + kd2 (\l>] - i|,2) ( * - i|;J*)
B/ Puissance virtuelle développée par les actions mécaniques extérieures
appliquées à (S )
^>*X = F • V-CO/+5(0,) . 3;*fi'*]
v-^f- y'* î;*-*-* zfl
LO JR0
g )*x = X x'*4- Yy'* + N ^j*
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 85 -
C/ Donc la puissance virtuelle développée par toutes les actions mécaniques
est de la forme :
(<jf$ - hï - kd2 ( - l m,'* + W2 (*, - *2) -*2* + X x'* + Y y'*
IV - EQUATIONS DU MOUVEMENT
Nous avons ici 8 paramètres qui décrivent le mouvement x, y, i|> , ij;-, <f> ,
<(>„, <j> , <j>, qui ne sont pas indépendants mais liés par les six relations de liaison
non holonomes.
Les équations de Lagrange s'écrivent donc :
(JE. JL _ il _ n Vx«* + (A JL - 3T - n ï v«*
Mt ' 3x' 3x V X W ' ay« "ây V 7
(d 3T 8T . ,* .d 3T 3T , ,*(dt 3*', 3*, S-/ *1 (dt 3*'2 3 %2> 2
(_Ë a^_ JL_ o ) è'* + + r-l_3I__ JJ__ o ) *'* - n+ Slt 34»', 3 %/ *1 + '•• + (dt 3<|)'4 344 %4
} *4 ~ °
pour les seules vitesses virtuelles compatibles c'est-à-dire vérifiant :
* 4* «kA! x! cos ip + y1 sin ty - a i/;1 = 0
A2 -xf sin \j)l -f y1* cos ty + b ^J* + R (j)|* •« 0
A-3 -xf sin i f j + y1 cos ^ - b .^J* • -i- R $'* = 0
A4 x1* cos i|/2 + y1* sin ^ + a2 ^* = 0
X5 -xf* sin ^2 H- y1* cos if>2 + b ^* + R <|>£* = 0
A6 -x1 sin ;i|;2 -f y1 cos i^ - b ^* + R <(>'* = 0
En utilisant les multiplicateurs, les équations de Lagrange s'écrivent ici :
d / 3T N 9T î?dT^-^T^i^^i xj aji
i = 1,... ,8, nombre de paramètres
j = 1,....,6, nombre d'équations de liaison
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 86 -
A/ Equation oÇ(-x.)
•ip- = (Mj-H^+Am) x' - i f / ' j (2 m S] + M^) cos ^ + i|,'2(2ma2+M2£2)cos i|»
£ (~!rr) = <VM2+4m) x" " *"i (2 mal + MiV cos *i + ^"2 (2 mVM2£2} C08*2.
+ i|>j2 (2 m a j + M j A j ) sin i^ - ^2 (2 ma2 + M2£2) sinifj^
II- 08x
D f o ù ^L(x)
(Mj+M2+4 m) xlf - if;1^ (2 ma} + Mj ' i j ) cos $} + $"2 (2 ma2 + M^) cos^
+ i(;j2 (2 maj + M j J l j ) sin i f j - (2 ma2 H- M^) sin ^
= X + A cos ty - \ sin ^ - A sin iK * A, cos if^ - X. sin ^2 - A& sin ^2
B/ Equation oL(y)
CiT
T = (Mj+M2+4 m) y' - if^'j (Mji,+2 maj) sin j + '2 (2 ma2 + M2£2> sin
^ ( "} = ^Mi+M2+4 m) y" ~ *"i (2 maj+Mj^]) sin *, + * 2(2 ma2 + M2£2} Sin 2
- 4>|2 (2 nu + MjJlj) cos fj + 22(2 ma2+M2A2) cos i 2
||- 0 d'où Sf(y)
(Mj+M2+4 m) y." - ^"j (2 maj + M j A j ) sin i j / j + i|)"2 (2 ma2 + M2£2> sin ^
- <|/j2 (2 maj + M j i j ) cos ^ j + if)^2 (2 ma2 + M2£2> cos ij>2
= Y + X , sin t|i + X cos ij) + X0 cos \l> + X. sin tp + X cos ijj + X, cos if*01 1 2 1 J 1 4 / : > z D /
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
- 87 -
C/ Equation oC(i|O
âTw-}mji.*'i-*' Ki cos*i - y l Ki sin*i
•SE (l V = Jl *"l " Kl C°S *1 X" " Kl Sln *l y"
+ xf i(;f K sin $ - y1 ^f K cos i);
âT-j±- - x1 »*! Kj sin <J,j - y' i^'j Kj cos ^j
d'oùâf(tj)
Jj ij/'j - Kj (cos 4.J x" + sin i|/, y") = N - kd2 (*j-*2) - Xj a} + b (X2-X3>
D/ Equation oCdj )
î T^p-= J2^'2 +x' K2 cos *2 + y » K2 .in+2
& (^} = J2 "2 + K2 C°S *2 X" + K2 y" Sin 2
- x' i|>'2 K2 sin i(»2 + y' i)» KZ cos
-^= -x' t'2 K2 sin^ + y- f2 K2 cos
d'où 5?(*2)
J2 "2 + K2 (c°S *2 X" + Sin 2 yll) = + kd2 (*r*2) + À4 a2 + b (X5~X6)
E/ Equation OC(<(>£) i=l,2,3,4
^ <V* ^7=I*'i
— C 3T "> - T A»dt S .' ~ I * i
Jî-.o3$£
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 88 -
D'où :
<§£(+,) I *"j = * *2
<§?(*2> Z *"2
= R X3
<§£«>3> * *"3 = R S
SS<+4> X *"4 = R X6
V - CONCLUSIONOn se borne ici simplement à écrire les équations avec multiplicateurs
comme simple application de la méthode de Lagrange. Leur exploitation en vue
d'une utilisation pratique n'entre pas ici dans le cadre de nos préoccupations
actuelles.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
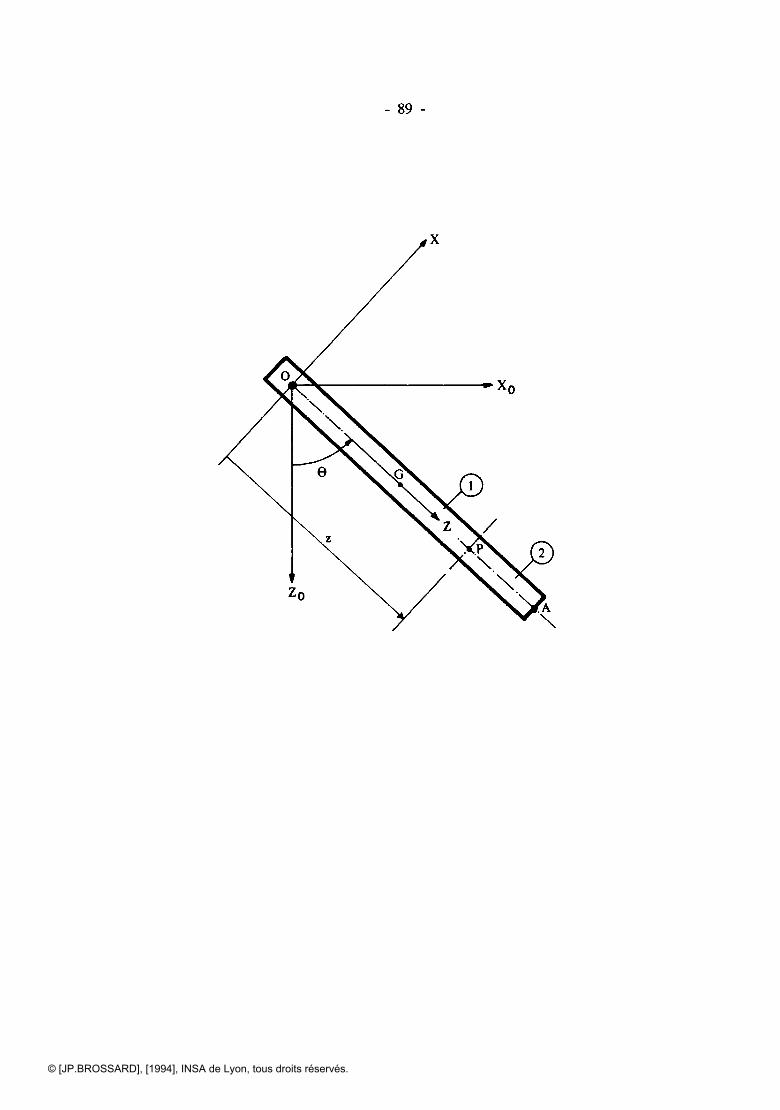
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
- 90 -
DETERMINATION D'UN TORSEUR DE FORCES INTERIEURES
ENONCE
+ + + +- Soit (0, X , Y , ZQ) un repère (R ) tel que Zfl soit vertical descendant.
Une barre homogène de masse m, de longueur 2a est assujettie à se déplacer dans le->• ->
plan (0, Xn, Z~) de telle manière qu'une extrémité soit fixe en 0..*..».->.
- A la barre OA on lie le repère(R): (0, X, Y, Z) tel que :
£ . QAZ - 2Ï-»• -4-
Y=Y 0
- > • - > • - > .
X = Y A Z
On repère la rotation de(R)$l0)par :
6 - (XQ, X)
- La liaison(R.j/barre est une liaison rotoïde parfaite. Au temps t=0, on a
0f = 0 ; 0 = a.
On se propose d'étudier le torseur des forces intérieures dans une section.
Soit un point P, tel que OP = z.Z. La section droite de coté z partage la
barre en deux parties (S ) et (S?) :
(S ) : partie OP
(S2) : partie PA
On désigne par T .„ le torseur des actions de contact (S )/(S?). Les coor-
données en P du torseur T ,« sont désignées par :
M1 / 2(P3 = [0, M, 0]R
F J / 2 - [X, 0, Z]R
A l'aide d'une transformation virtuelle incompatible, déterminer M, X et Z.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
- 91 -
SOLUTION J
I - RAPPEL SUR LES EQUATIONS DE LAGRANGE A PARAMETRES NON INDEPENDANTS
Dans le cas le plus général l'équation de d'Alembert s'écrit :
(Aj " V qj* = °A/ Q. - coefficients de la puissance virtuelle développée par les actions
mécaniques dans une transformation virtuelle quelconque.
Qj = QJD + QjC + QjLE + V
Q. = coefficient de la puissance virtuelle développée par les forcesdonnées.
Q. - forces de cohésionJ^
Q. T = liaisons intérieuresjLl
Q. _ = liaisons extérieuresJ LilL
B/ A. « — ( t ) -•-jj— j = l...n (n paramètres)q j q j
coefficients de la puissance virtuelle développée par les quantités
d'accélération.
C/ On peut écrire : A. = Q.
mais ceci ne présente pas grand intérêt car dans une transformation virtuelle
quelconque la puissance virtuelle des actions de liaison ne sera pas nulle, même si
les liaisons sont parfaites (QiT T + QUI? 0) •
Un système étant généralement soumis à des liaisons, une transformation
virtuelle compatible avec les liaisons telles qu'elles existent à l'instant t
(T,V,C) présente un intérêt. Dans une TVC les q! vérifient les (h+&) relations :* "*"
a. . q! » 0ij J
avec 9f.
a f = -— pour i = 1... h relations holonomesij dq.
a.. = a.. pour i = h+l...m relations non holonomesJ J m - h+£
On a donc pour des TVC le système suivant :
(A. - <Q.. ) q!* = 0 1 équationj J j
(S) ,*aii qî = m ecluatlons a n inconnuesJ J i - 1 m
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 92 -
Pour que les q! vérifiant les m équations, vérifient une équation supplémentaire,
il faut que cette équation soit une combinaison linéaire des m autres, soit donc
(A. - Q.) q!* = A. c,. qj* = 0 V qj*
X. sont les paramètres de Lagrange.
On a donc :
A. = (}. + X. a. .J J i iJ
j = 1... n nombre de paramètres
i = 1. . .m nombre d'équations holonomes ejt non holonomes
Remarque : On aurait pu initialement réduire au nombre minimum de paramètres en
utilisant d'abord les h équations holonomes.
On aurait obtenu dans ce cas :
A/_JI_U JL - n + A adtW.J 3q.j QJ i U
j = l...n-h réduction au nombre minimum
i = 1... £ nombre d'équations non holonomes
maintenant si,
- liaisons parfaites avec TVC Q£ + Q£ = 0
- solides parfaits Q^ = 0
d'où :
JL ( T ) JL - ô + x «dt (^.} 8q..- QjD Ài aij
D/ Signification des multiplicateurs
1°) T.V. Incompatible
JL (_ .) _ JL= Q.dt q'/ 9q.. ^j
2°) T.V.C.
d , 3T x 3T TTdt * ?57 ' «j + A i a i j
On a donc : Q. * *Q. + A. a. .J J i ij
QjD + QjC + QjLI + QjLE - QjD + V + QjLE + JLI + h aij
TVI pour une TVC
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 93 -
Si maintenant :
- solides parfaits
- liaisons parfaites
V + V = °v - v = °QJD=^jD
On obtient donc :
QjLE + QjLI = Xi «ij
Autrement dit* les coefficients de la puissance virtuelle développée par
les actions de liaison* dans une T.V.I. respectant malgré tout l fétat solide sont
égaux à \. a., appelé réaction de liaison généralisée.^ 1"$On voit donc que l'on peut utiliser les T.V.I. pour calculer les actions
de liaison* en dehors de la méthode classique des multiplicateurs.
II - APPLICATION AU CAS CONSIDERE
A/ Position du problème
On veut déterminer le torseur des forces intérieures dans une section de
côté z (voir figure) au point P.
La méthode la plus classique pour étudier ceci serait d'isoler la partie
(2) et d'utiliser les théorèmes généraux.
On peut cependant, utiliser les possibilités d'une transformation virtuelle
incompatible.
Le torseur cherché est de la forme :
FJ2 = [X, 0, Z]RO
T12 _.
M]2(P) = [0, M, 0]R]
La transformation virtuelle incompatible sera telle qu'en plus de déplacer
angulairement la partie (2) par rapport à la partie (1), elle la déplacera suivant
X et Z d'une quantité x et z. Cette transformation respectera toutefois l'état
plan du système.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

Le système considéré sera donc le solide (2). Il sera repéré par 4 paramè-
tres x, z, 0 et 0 . De plus on introduit 3 inconnues dynamiques X, Z, M. On a au
total 7 inconnues.
On pourra écrire 4 équations de Lagrange.
De plus on a 3 équations de liaison
x = 0
' z « 0 '
fi = fie, e2
- 94 -
On aura donc le schéma suivant :
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 95 -
B/ Analyse des actions mécaniques au solide (2)->
- Le poids P
. Z2 +P- = mg x — Zn m : masse totale de la barre homogène.
- Action de ( l ) / ( 2 )
F12 = [X, 0, Z]R()
T 9 < ^ R choisi arbitrairement[ M12CV &. M, O]RQ)R]
Remarquons que ce sont les composantes sur (R ) qui nous intéressent.
C/ Puissance virtuelle des actions mécaniques
/T/<)* •* -* * -> •> : * •*• ->1*y = P2. v°(.c2)*+ F J 2 . v°(P2>* M]2 . n2*
n v-(p2) -il ^-^(ôr, ^72)"O z sin 6
ôTj = 0 = 0
WR, 1», cos ej^
V 2 = oLzjRoz sin 6 + x
ÔP^ = 0
z cos 6 + z J1 ! R0
i t «•» T™ t ** . ""d'où : z, cos 6. 6: + x'-*• * ' ' 'v°(P2)= o
_-Z] sin 6, e;* + z'*J RQ
2°) V°(G.) = |1 ÔG.2 dt 2
"ÔT2 = ÔP^ + P^G2
r • n r Z 2 -iz sin 6 + x — sin 60i l 2
2
= 0 + 0
z cos 6 + zj [^ cos 6 J1 ' R0 2 2 R0
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 96 -
r Z2 . nz sin 6j + x + — sin 6?
OG,* = 0Z?z cos 6, + z + _£ cos 6
i-l 1 2 2-JRQ
d'où :r i* i* Z2 ,*nz, cos 6j 6j + x' + -j- cos 62 6
V°(G2)* - 0. ,* ,* 2 . .*L-ZJ sine, ej + « • -- .ine2 e^ J^
0 .1 -.0 03°) n2 = û2 - çi}
T^1* = Cfi'* - fl'*) Yn2 - <e2 e, ; YO
4°) On a donc^Tj qui s'écrit :
Z 7
J = mg | (- Z] sin e, 8j* - -j- sin 92 62'* + z'*}
+ X (Zj cos 6 8J* + x'*) + Z (- Zj sin 6j 0J* + z'*)
+ M (e2'* - ej*)
Soit encore :
P* = Xx'*+ [rag!|+z]z'*
f* Z Z ""i
H- - mg -| - sin 6 + X z c o s e - Z z sin 6 j - M 6j*
z 2+ ^-m g_2_ s ine 2 + MJ6 2 *
D/ Energie cinétique du solide (2)
T ° - i - 2 ^ < G2 x ] 2 * î ^ V ° *
-2--ÎI ' . ^ ' ^ ^
m2
z22 0 G ] F m Z2
3 0 0 "PT 1_ 12 m9z 2 24 a m z.3
N- 0 -L2_ 0 - 0 -^ 0
0 ° °JR2 - ° ° °JR2
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
- 97 -
On a donc T°
T° =2TT [< z i c o s ei e l + x ' + T cos 92 62)2
Z2 2 l+ (- Z j sin 6 j 6'J + z' - -y sin 62 ôp
m z| 2
+ 48~7 92
E/ Equations de Lagrange
,°vQ3 % . d , 3T, 8T1 )<2M • ât <â?-> - aï - Q,
•â7--Vt (« ,«> . e j e j + ^ c o . e 2 o - + ^ )
£ ($-> = T^ (Z1 COS 6! 6Ï + T C°S 62 82 + X" - 21 Sin 61 6I2 - T Sin62 622)
|I=09x
QX = X
d'ouSf^x)
m Z2 Z2 2 Z2 22 a (z, cos 6j 6'j' + -j- cos 02 6j - z} sin 6j 6j - - sin 62 6^ + x") - X (1)
^\S^(-,\ d t 3T ï 3T n2 ><S«I : IF ( p-} ~^= Qz
De la même forme. On obtient :
m z z z- - (- Zj sin 6, 6'j' - -y- sin 62 Oj - Z] cos Q] 6p - -y cos 6£ 6^ + z")
<2)
' z * "8 âT
3<>^v: fe^)- f-%9T m Z2 Z23ÔT- - -5-7- (z, cos e, ej + x' t — cos e2 ep x Zj cos e,
m z2 z- -yj- (~ Zj sin Sj 6j + z' - — sin &2 Q^) x Zj sin Q]
qui se transforme en :
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 98 -
l>ff = T1T [ Z i 2 e ' i + z i (x> c o s e , - z ' sinV '^cos (62-9,) e-2]
£ (^~} ' TT [z i2 eï + zi (x" cosei - z" sinei - x ' e i sinei - z ' e i COSVZ Z Z Z ""1
- -Li sin (62-Bj) (e'2-eV e'2 + - 6"2 cos (e e,)!
3T m Z9 F Z9
• •--2T [- <Z1 COS61 6'l +X'*T cose2e'2) Zl 6'l Sin6lZ9 "I
- (- Zj sinôj ej + z' - -y- sin 62 6 ) z} 6j. cos eJ
qui devient
ST m Z2 r ziz? "iâë; -ir L" zi e'i (x' sinei + z' cos ei} +-r-e'i 6'2
sin (Vei)JFinalement :
Z1Z2Q « - mg _— sin 0 + X z cos 6 - Z z sin 6t - M6/1 Zâ. 1 1 1 1 1
D'où §£(6,) :
m z p 2
-j-^- Z j 6" + Z j (x" cos6j - z" sin6j - x' sine^j - z' c o s O j e J )
Z1Z2 Z1Z2--—=• sin (e2-e,) (ef2-e',) e»2+-j^- cos (e2-e,)e"2
(3)Z1Z2 1
+ Z] 6'j (x1 sinOj + z' cosOj) j 6'ie>2 sin (62~61)
Z1Z2= - mg -= sin6 + X z cos6 - Z z sinô - MZ 3. 1 1 1 1 1
«•>Sf«£ = ^ <âf-' - - %2
3T m Z? F Z2 Z2âfj- = TT L (Z1 C°S61 6! + X> + T- COS 62 92} - COS62
z z -,. . - (- Zj sin6j 6] + z' - -y sin62 6 ) -y sin62
m z+ 22rie2
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 99 -
qui devient :
2 2mz_ r z z z2 z z2 i
âff- " 77 [-ÎT "S < W 6I * T <*' COSe2 - Z ' Bi°V * T 92 * 12 62 J
é <w[-'• r [- *™ <ve,' »{.-1-' •'• * <°* <92-9,>6',' -•y
+ JL (x'f cos62 - z" sin02 - xf 0^ sin02 - zf 0^ cos02)
+ Z22 <7 + T7> eï- ]v
1/3
^ = 2? [-(Z1 COS61 6i +X' +T «-flz^T- Sin6262Z2 Z2 1
- (- Z] sin6j 6] + z' - sin02 6 ) - cos92 6^1
m z r z z z -i= ~2T" I " 2 6>2 (x' Sin92 + z> COS62) "~T 6'l 6>2 Sin (92"ei)J
Finalement : „Z2
Q = - mg -•— sin 6_ + M0 ~ H 3. £.
D'où c§L(62) :
2m Z9 r z? s-55 | -j- 6"2 + - (x" cos62 - z" sin62 - x' 6'2 sin62 - z
1 6'2 cose2)
+ !i cos ^ ellj _ V2 sin (V0]) (e,2_el]) 6<i ^
Z2 Z,Z2 1
+ ~ 9'2 (X> Sin62 + *' COS92) + ~T 6'l e*2 Sln (92~V I2
22
= " mg 4~a" Sin82 + M
F/ Utilisation des équations de liaison
x = 0
z = 0
e, - e 2 - e
On remplace donc ces valeurs dans les équations de Lagrange. Il vient :
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 100 -
( 1 ) donne :
m Z2 F 2 Z2 2 1- - Zj (cosee" - sinee' ) + -~- (cosGe" - sinoe' ) = x
m Z2 Z2 2x = -—=. (Zj + - > (cosee" - sinee1*) (5)
(2) donne :
m z z 2 z- -5— (Zj + -y- ) (sinee11 H- cosee1 ) - z + mg J
m z •- z -•z •- - -~ I g f (z, + -y-) (sinee" + cosee'z) I (6)
(3) et (4) donnent :
m Z2 F 2 Z1Z2 1 Z1Z2(3)+ -=-=• z. + —!r-=- 6" - - mg -£-=• sin 6 + X z, cos 6 - Z z, sin 6 - M (7)
2a |_ 1 2 J 2a 1 1
2 2m Z2 PZ2 Z1Z2 1 Z2(4)-. —.£ |-|- + -Ll je» = - mg __ sin e + M (8)
Nous avons donc maintenant 4 équations à notre disposition pour déterminer
X, Z, M et le mouvement du système.
G/ Recherche du mouvement
Si on porte (5) et (6)ldans (7) on obtientet (8) J
m Z2 T 2 21Z2 1 Z1Z2 m Z1Z2 Z2 2 ,1~2T Zl ~T^ 6" = ~ mg ~~IT Sin 6 + 2 a
(Z1+ T)(GOS 6" ~sin 9 COS 6 J mZ]Z9 Z9 9 9 mg Z1Z9 sin6
+ —~ ( Z j + -j- ) (s in6e" + sine cos 6 6 'z) + 'g
mz P z 2 z z -, z 2
--il [^- + -¥J e"-^ri s ine
ou encore2 2
m Z2 f 2 Z1Z2 Z2 Z2 Z1Z? 1 m& Z9Trt'i T1 -z, <', +^>*4- ' J6'"-- si"e
z.z z g z sin 6(_!__£. + _£_) e" = -\ 2 3 ) 2
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 101 -
Z Z
2 <-L + -i) 0" . - g sin 0
Si z = 0 -* z? = 2 a toute la longueur de la barre
on a : i
y a -6" - - g sin 6
H/ Calcul du torseur intérieur
1°) Transformation de Inéquation du mouvement
0ii » - 1 £ sin 64 a
3 aeffef « - —'*• sine e?
,2il- = + 1 & cos e + c2 4 a
A t=0 0f=0 05=en conditions initiales fixées :
0 = 1 £ cos 6n -H C4 a 0
c « - 1 & cos en4 a 0
d'où : . i —: -
6'2 - J.J (COS 0 - COS 0Q)
2°) Calcul du moment fléchissant M
Lféquation (8) nous donne :
m Z2 T Z2 Z1Z2 1 Z2M=S-HT [-f * "¥] «M*-«4T. sine
On remplace 0' par sa valeur2 2
m Z2 T Z2 Zl 1 3e mg Z2M = -ra-[T + Tjx(-!f sin e)+ -5-2- sin 6
2 .mg z sin 0 p z z -i
M": Vr— L1-^! <T*T->J
mais z? = 2a - z
mg (2a-z )2 r . , ,« r_a_.tB,[1-^<»5s.i.i^,i)]
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 102 -2
mg (2a - z ) . r -iM « 7 — s i n e - yi- z ,4 a L 4 a 1 J
(2a - Z j ) 2
M = - mg —! ;r-— z sineI
f t» i6 a
M a la même expression sur R- etM - f (z ,6) sur R j
3°) Calcul de T : composante suivant X et de N : composante suivant Z
On a :
" T 1 ["cos e 0 - sin e] f x "
0 0 1 0 0
N sin e 0 cos e Z „L JR r L L JRQ
On a donc :
T = X cos 6 - Z sin e
N • X sin e + Z cos e
Selon (5) et (6) on obtient :
m z z mz r za) T = -^ (z. + - f ) (cos ee f f - sine cosee1 )+ -r-^ g sine+Xz.^Xsin ee l f-i-sine
^a i L ^ ^ L 1 ^ 2"!cosee1)
m z z mg z sin e -IT = TT <z, +-T )e"+-^
m (2a - z )T = 7 !- (2a + z.) 9" + 26 (2a - z , ) sin 6
4 a 1 2a 1
6» = - 1 & sin 64 a
Après remplacement on trouve :
T = mg' ? (2 a - z , ) ( 2 a - 3 s,.) s in 616 a
mz z mz r zb) N = •=-=• (z + -) (sine cosee" - sin 66' ) - -^- g cos 6 + (z, + ^f )
z a i z z a I \ £,2 2 l(sine cosee" + cos ee' )
m z z m z JN 5r (', + - / > e -nrg c o s e
N = - ^2_ (2a - Z j ) (2a + z,) 6 '2 - yL- (2a - Z j ) g cos 6
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 103 -
Sachant que 6' = — •& (cos 6 - cosO ) on obtient :2. 3. U
N = 2i_ (2a - z-) + 4 a cos 0 + 3 (2a + z )(cos 6 - cos Q)8 a >• -J
C/ Remarque :
On voit que M et T sont indépendants des conditions initiales alors que
N en dépend. On retrouverait ces résultats par application des théorèmes généraux
(Voir chapitre 6 cours p.435-438).
III - CONCLUSION
Cette application nous montre que l'utilisation des transformations
virtuelles incompatibles pour déterminer les actions mécaniques est très délicate.
Pour cette détermination on leur préfère les théorèmes généraux.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 104 -
2ÈME P A R T I E
LES E Q U A T I O N S D ' A P P E L
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 105 -
INTRODUCTION A LA DEUXIEME PARTIE
Nous ne présentons dans cette partie qu'un seul exemple d'application
de la méthode d'Appel. Cela est suffisant pour présenter cette technique d'écri-
ture des équations du mouvement d'un système.
Bien sur un certain nombre de problèmes traités en première partie
sur la méthode de Lagrange pourrait être repris par la méthode d'Appel, en
particulier ceux qui concernent les multiplicateurs.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 107 -
ETUDE D'UN VARIATEUR DE VITESSE AUTOMATIQUE
(à vitesse de sortie constante)
|" 1ÊNONCE _ i
Le système est composé de six solides (So), (S ) , ( S « ) , ( S ~ ) , ( S , ) ,
(S,.) disposés comme l ' indiquent les figures 1 et 2. Les liaisons (S ) / (S 0 ) ,
(S , ) / (S ), (S,-)/(So) sont rotoïdes d'axe commun. (S2) est fixe dans le
bâti (So). (S«) sert au réglage. La liaison ( S , ) / ( S C . ) est prismatique,
l faxe étant le mêïr.e que l'axe des liaisons rotoïdes précédentes (autre-
ment dit ( S , ) et (S s) sont solidaires en rotation). (S,.) est une sphère
de rayon R en contact en A, B, D, C avec (S ), (S2) , (S^), ( S - ) . Le
contact est maintenu par deux ressorts de raideur K et K choisis de
manière qu'il y ait toujours entraînement par friction.
( S / ) et (Ss) solidaires en rotation constituent "l'arbre" d 'entrée
du variateur ; (S..) l'arbre de sortie ; ( S , ) et (S ) entraînent (S )
en rotation qui lui même entraîne (S,.).
* à (SQ) on lie (RQ) : [0, XQ, YQ, ZQ]
0 € à l'axe des liaisons rotoïdes
Xo porté sur l'axe
YQ arbitraire
*o - *o A ?o
* [0, X, Y, Z] désigne un repère lié à chacun des solides
x = x0Z dans le plan G, A, B, C, D
Y = Z A X
La figure est faite dans le plan [0, X, Z*]
* à (Sj) - (Rj) : [ Sj, Xj, Yj, Zj]
* à (S4) - (R4) : [ S4, X4, Y4, Z4]
'!5 = * À (^ ) -* C R ) ' f S X Y ? "J ' Y = Y5 v^-^/ • L 3^9 A^> i^j ^^j . i^ L^
[55 = \Les éléments dimensionnels nécessaires sont portés sur la figure 2.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
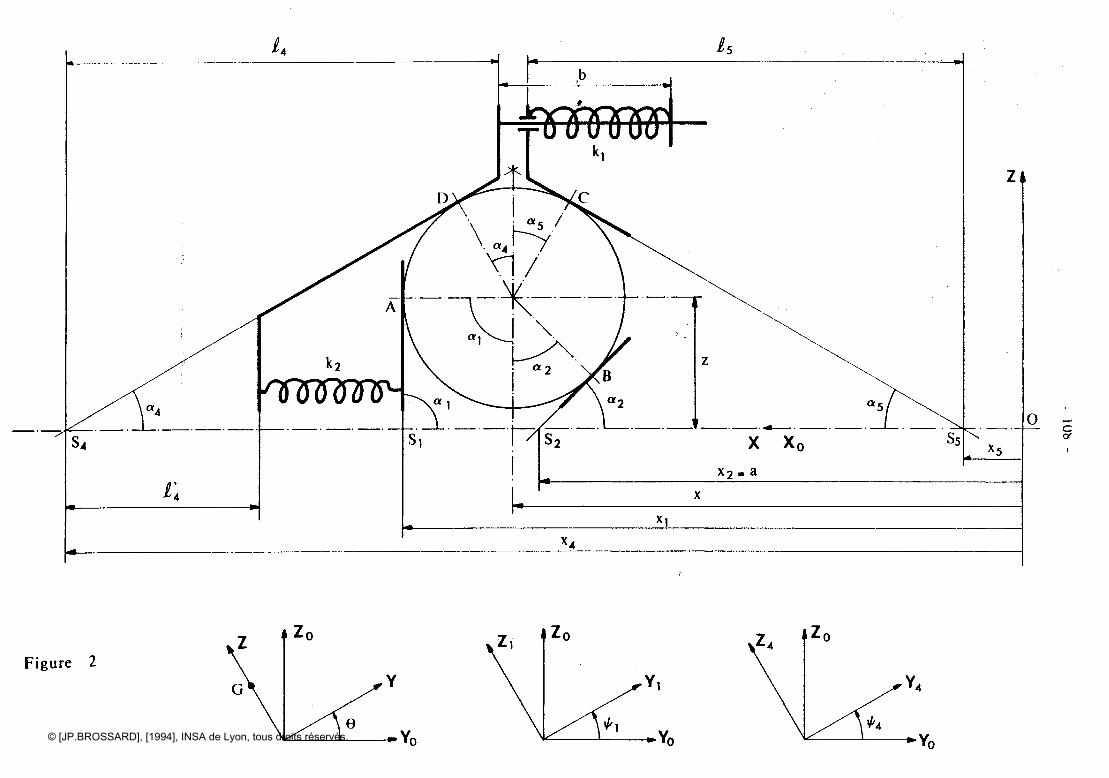
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 109 -
I. Etude des relations de liaison.
A. Relations holonormes
1 - Relation entre x et z
2 - Relation entre x1 et z
3 - Relation entre x. et z
4 - Relation entre x,- et z
B. Relations non holono.mes en projection sur lfaxe Y perpendiculaire
au plan de figure
1 - Relation de roulement sans glissement en A
2 - Relation de roulement sans glissement en B
3 - Relation de roulement sans glissement en D
4 - Relation de roulement sans glissement en C
Pour ces relations on nfannulera que la composante suivant lfaxe des
Y perpendiculaire au plan de figure.
II. Fonctionnement du variateur au plan de figure
A. Déterminer la vitesse fL de la bille. Déterminer la valeur du rap-
port p = Y1 ../Y1, en fonction de z.
B. Expliquer comment, si la vitesse Y1/ varie, la vitesse Y1- peut de-
meurer sensiblement constante.
III. Etude dynamique.
Mettre en équation le système. On introduira les actions mécani-
ques nécessaires ainsi que les éléments d1inertie.
On conseille Remploi des équations d'Appel. Paramètres (z et Y,.)»
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 110 -
SOLUTION
I. Relations de liaison.
A. Holono .mes.
1 - Relation eritre_x et z.
Exprimons OG de deux manières différentes :
xQG = 0
zR
Ôb = ÔS2 -*• S^B + BG
OS2 = a X
-P2 cos c*2
S^B •= 0
P2 sin a2
: RR sin &
BG = 0R cos 0^2 R
a - p2 cos o>2 -f R sin c*2 a - p 2 ^ - - f R ^ y
OG = 0 = 0\/2 \/2
P2 sin <*2 4- R cos c^2 P2 2 "*" R 2
4 L .R
en ef fe t Œ^ = T-
On tire p2 = (z - R y )/2~ =z V/2~- R
x = - z + a + R|/T
2 - Relation entre x. et z
x = x -Hh R
x1 = - z -f a 4- R( \ /T+ 1)
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 111 -
3 - Relation entre x, et z
OG = OS, •*• sTtr + lx;4 4
*1 X4 - ?4 cos <*4 - R sin <*40 °
>ZJR P4 sin c*4 - R cos c*4 R avec o>4 = g
m '««-pi f - i i0 0
H b-.fL Jk
1/7-on en tire p, = 2(z -f R -y- )
x4 = ( 4 / 3 - 1 ) 2 4 - 3 - 3 - R(2 -f 4/2) en utilisant x = -z 4- a -fR l/I
4 - Relation entre Xj. et z
OG = OS5 4- S"5^+ CG
x x5 -f p5 cos ŒS HH R sin c^c
0 = 0 avec ac = TD o
^ z l p5 sin cv5 - R cos ^5
4l
xl I"x5 + p5 f +|
0 0zl £5 ^
2 " R T-1- - R
On en tire p5 = 2(z -f R &--)
x5 = -(1 -f\/3)z + a + R( \£" - 2) en utilisant x = - z - î - a - f R ^ 2
B. Relations non holonormes»
1. J uJ-ement sans glissement en A
\ (A) =TO
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 112 -
V°(A) - V^(A) = 0
V^A) = V^G) + flg A GA
V^(G) = \^(G) + v£(G)
[x1] f-z'"
V^CG) = 0 = 0 car x = - z + a + RV/2~
z' z*Lzi Lz io
\Ç(G) = fÇ AÔG = 9')? A (xX + zZ) = - z 0' Y = -z 6'
0
''-z' 1
V°(G) = -z 0'
z«L -R
'"^1 J"R~ 0
B° A GA = U)2 A 0 = u)3R
U). 0 -U) RL -I L 4i
_ n L JR-z'
\Ç (A) = -z'91 + UJ3R
z1 - tl)2R
•R
. vJ(A) = vJCSj) +CÇ A^A
"X'î| "f'll "° "
0 + 0' A 0
0 0 zR R L •«•
x' j 0 -z'
_ 0 + -zY' = -zY' car X j = -z 4- a + R ( V~2 + l)
0 0 0
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 113 -
0
V^(A) = -z 6' + U3R + z Y« 1
. -z« - u)2 R R
d'où la relation - z G1 + u>3 R + z Y*! == °
suivant l'axe des Y
2. Rou lement_ sans_g_li.ssement^ en B.
V3(B) = 0 V^(B) - v£(B) = 0
. V^ (B) = V^(G) + fi^ A GB
r -, r 1 r /2 1^ - R cos a2 " R T ®2
?Ç A GB = U)2 A 0 = R^ (Wj - (U3>
[0)3] [ - R s i n a 2 R| ^L JR
_ TT
<*2 ~ 4
\/2-z> - R T «2
V^(B) = .20« + R (GUj - U)3)
z ' + R f * 2
-JR
. V^(B) = 0
£D^ù la relation -z 0f -f R ^r- (a) - CD ) = 0
3. ^uLement _san£_ g 1 i s s ement^en JD.
. V^(D) = 0 V^(D) - V^(D) = 0
V^(D) = V^(G) + fÇ A G D
0). R sin a, 0)2 R cos Q^
-*0 —*n A GD = œ9 A 0 = a). R sin or, - 0), R cos o/.
^ • ^ 3 4 1 4
œQ R cos a, -U)0 R sin &.j\ 4 2 4
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 114 -
\*%
= «^ f> « 4 -5
' ""2 | R
-z« + R J£ U)£
V^(D) = -z& + | <u>3 - œ1 y/3)
»•- | *2 R
• V>) = V^(S4) + Q£ A Sj
' x >4 " r 4 J f-P 4c o s c *4~j I" x'4
0 + 0 A 0 = -p4 Y'4 s i n a4
0 0 p, sin a, 0
TTa4= 6
( ^3 - 1) z«
V^(D) = .(Z +R J^) Y'4
0
" -z« + R u>2 - ( l/3~- 1) z«
V^(D) = -ze1 +1 (u)3 - OBJ i/5) -f (z + R Ç ) r4
_ z' - | »2
D'où la relation :
- ze« - R («j +1 o>3 + (z + R Y' > ^"4=°4. Rou lement sans £li£sement_en _C
. v3(c) = o v (c) - y (c) = o
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 115 -
V^(C) = ?<£>+ cÇ A GC
œ! -R s in &5 UD R cos a
Q3 A GC = i»2 A 0 = -u^Rcos <*5 - u>3 R sin c*5
œ3 R cos Œ5 R U)2 R sin a R
TTavec ®r = T
eu R ^2 K 2
C§ A G C = -«JjR^f - cu3 |
. "2 f J R
-2' + u>2 R
^(0= -z9' - ^R^f - »3|
z ' + a ) , |L 2 2 JR
. V°(C) = V^CSp+cÇ AS^Ô
X5 YI4J f P 5 c°s a5 1 |"-( »/3•-§- l ) z«
= ° + ° A 0 = - p5 sina5 Y « 4
. ° J ° PS sin « 5 O R
" -(\/3 + l )z«
- C « + R ^ ) Y'4 p 5 = 2 ( z + R ^ " )
0 JR
~ - z « + o>2 R Y+ ( V/3 + i)z t
V35(C) = .29. -Vf - » 3 | + ( , + R ^ " ) T . 4
z' +"2-|-
JR
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 116 -
D f o ù la relation
-z 6' - R -y Ottj - (U3 |+ (z + R y") Y' 4 = 0
II. A - En résumé nous avons les relations
(1) x = -z + a + R 41
(2) x1 = - z + a + R( x/T + 1)
(3) x4 = ( vJ3 - l)z + a 4- R y/2( \/2 + l)
(4) x5 = -( fi + l)z + a + R \ f2(l - \J2)
(5) -z0» + («3R + z Y ' j = 0
\/2(6) -z0'+ R-j- (u> - u>3) = 0
(7) -ze1 - R y UJj + | UJ3 + (z + R ) Y « 4 = 0
(8) -z9! - R -y «Bj - | U)3 + (z + R -y )y»4 = 0
de (7) et (8) on tire U) = 0
de (5) Y ' j = 8'
R V2 ^2de (6) 6' = —j ("j °u «BJ = — z Y1 uj» indéterminé
de (7) ou de (8) on tire Y'4
-z Y' 1 - R -^ ^ z Y « j + (z + R ) Y' 4 = 0
- Y' z(l + ~ ) + Y 1 , (z + R & = 01 \/2
Y , i 8 0§JLÎË)!B:¥,4(B + R|)
]" Y^ \fî z + R ^ »n / ^ \ _ •!• _ £_ IPU; - -^- - + ^3- . z |
K--f--' f i |«3 0)2 6' = Y ' j
U)- = 0L J -lR
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 117 -
€*'! VI Z + R T
B. Etude de la fonction p(z) = —— = ^_* 4 \/2~+x/3
/• ï N/2 , R N/3\p ( z ) = — ~<1 + -^~-}
j2-J-xh
P(z) est une fonction décroissante de z
N/2hyperbole dfasymptotes z = 0 et p = —
\/2 +v/3
Lorsque z croît de la valeur z à la valeur z^ f(z) décroît unifor-
mément.
Y'j ^ _ dY'j dY'4p(z; = r" - -
4 p Y'j Yf4
1 = .4-Yf! P Yf4
Si Y1/, croît dYf. est positif mais dans le même temps z croît donc
p décroît, cfest-à-dire que dp est négatif.
dY!45Ë. et —— ont des signes contraires ce qui entraîne que leursP Y 4
effets sféquilibrent : donc dY^ est sensiblement nulle. La vitesse
¥' est sensiblement constante.
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 118 -
III. Etude dynamique.
Mise en équation.
A - Analyse des actions mécaniques.
^•* Puissance virtuellle développée par les couples d'entrée et de
so£tie_.
ï P î - C j Y'*
(?*= C, r*J 2 2 4
!_i=p(z) . Y,* =^ n*p
_ (?* = —L-— Yi*^ 2 p (z) Tl
O
- S** = + ] Y|*
2. Frottements au niveau des articulations.
Frottements de type visqueux en (4) et (5), négligés partout
ailleurs.
s = i b [ ]2 = i b [ v^ - 7^]2
-»4V — Y t - V *V5 X 5 4
x5 = -( \/3 + l)z + a + R \/2 (1 - i/2)
-> x'5= -( \/3 + l ) z«
x'4 = + ( J3 - 1) z1
-, [ V^ ]2 = (- x/3 - 1 - \/3+ l)2 z'2
= 12 z '2
$ = | 12 b z'2 -» Q = - 12 b z'
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.
- 119 -
3. Action_des ^ressorts.
V "l + "2
Ul - - { Kl <L1 - L10)2
Li = |FE|
FE = ÔE - ÔF
FE • XQ = (x4 - 14 - b) - (x5 + 15)
= X4 - X5 - X4 - 15 - b
|FE| = X5 - X
4 + *4 + 1
5 + b = Li
Ul = - I Kl (X5 - X4 + \ + 15 + b - X50 + X40 - ^ - L5 - b)2
U1 = -|K1 [ X5 ' X4 - X 50 + X40 ] 2
x5 - x4 = -( ^3 + l)z + a + R^/ICl - Jî) - ( v/3 - l)z - a - R Jï( fî + l)
= - 2 \ f â z - 4 R
-» Uj = - | Kj [ -2 y/3 z - 4 R + 2 fî ZQ + 4R ]2
Uj = - i KI 12 (z - Z())2
- Calcul de U_
L2
= ! «Sil
"I 'HI, HSj = - ÔH
iiSj . xQ = [Xl -(x4 - i«4)]
I^ll= x4 - Xl - 1!4
U2 = . l K2 (_Xl + x4 - P4 + x1() - x4Q + P4)2
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 120 -
x4 - X j =( ^3 - l)z + a + R \/2( ^/ï-J- l) + z - a - E( >/2 + 1)
= ^3 z + R
U2 = - | K2 ( yfj z -h R - \/3 z0 - R)2
U2 = - \ K2 3(z - zQ)2
UR = U1+ U2=- | ( 1 2 K1 + 3 K 2 ) ( Z - Z0)2
^* ^?JÈ^?IL ^e-J-a pGs^nt^ur
U = - m g ZG
z-, = z cos 0 négligeableo
5, Ac t i on s jie^ con t a et
billes - cônes -* négligeables
B - Energie d'accélération.
s = s 0 + s 1 + ... + s5
s0. i. [3°(c)]2 + X>2(cÇ. ÎG . ïÇ) +1 a?. ÎG . £
+ 43 * $^3T - F - E V f î
1 1 1 11 2 1
q == -1 m xn -f- •— F V f f O O 1 -F B - D OSl 2 1 1 2 L Yl' °» ° J 1 1 1
."EI " DI GI J L ° .s i = I mi xï2 + \ h n>2
1 2 1 2c = ± m x l f -f •— I V!!b4 2 4 X4 2 4 Y4
c = i. m xl! 4- •— I M71'S5 2 5 X5 2 5 Y4
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 121 -
x"4 = ( Va - i) z"
x"5 = -( \J3 + l)z"
¥, = w, N / 2 + N / 3 z4 1 VJ . + JL£.
\/I + \l3 z VT+ >/3 r z? zz*yn ._- ^n y . ^^ v j ^ «. ^f v ^ ^^ y j r -,*- i ^ rn?- '• ^r ,+ S£- ^7i^;2]
S4 + S5= | { z"2[m4( \|T - l)2 + m5( JJ + l)2]
2 ( \ /2"+N/3) 2 2+ d4 + i ) [ r:2 —5 . —ï—^—
r * R ^3 ^(z + —j~ ^
( \}~2 + \/3)2 R \/3" zz» Y '+ —^—-T^-ï*"^1
(—2" + z)
S = I m T 1°(C)12 -I- 1 d 0° f d B°S3 2 m 3 L J ( G ) J + I _ n 3 . I G — Q3
J°(G) = JR(G) + jJ(G) + 2 ïÇ A (G)
x"
^(G) = 0
z" R
3^ (G) = J^(0) + ^ ^ A Ô G + ^ A ( ^ A d G )
6'1 f X
n£= ° ÔG = o. 0^ R z R
0 6" x 0d -O -»— ^ A O G = 0 A O = - z e "
0 z O R
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 122 -
o r g» 1 o on£ A ÔG = - z 6f fÇ A (G? A OG) = 0 A -z 0' = 0
0 R L° _ ° -Z0'2 R
0
J?(G) = -z e f î
2-z 0* R
ef 1 x f o2 Q£ A V^G) = 2 0 A 0 = 2 -z'61
0 z f O R
x" x" = - z"
rjO(G) = -z6" - 2z t e i * ef = Y»2
y ! ' . y Ûf P" J Q»» = Y»»
A
- t J°(G) ]2 = z"2 4- Y^'2 z2 + 4 zz'Yjf'j' + z"2 - 2zz"Y«2
tu' 1 i" œ '
^ ^ - ° - %- "0 J R O R
^2 Vl«1= T z Y 'l
\/2œ'j = — (z r'j + z» Y ' J )
", 1 d T<) = d r»0 1 2 _2 2 , 2 ,,2 , . , „„ V f l Ns t - 2 d t n 3 ^ d t ^ - i - 3m3R R T ( Z n1 + 2 z z ? n - S3 = | m3 [ | (z2 irç2 + 2zz« YJ Y^1)]
+ y m3 (2z"2 + <P"2z2 + 4zz« Y^Y'j' - 2zz»Y^2)
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.

- 123 -
l'énergie d'accélération a pour expression :
S = \ { &>! + ( >/3 - D2 m4 + ( p + D2m5 + 2m3J z»2
-a.,.*'2,» 4- [^ +(I4 4- I5) ijfLtJll! . _zl_^ + 2] 23 1 1 ^ 5 2 RX/3 .2 D J X
(z 4- -^—;
( x/2 + JJ)2 R v/3
+ C(i4 + i5) 2 • • ' „ / ? . + T ^ z z 'Y f iY"i?(z+i^)3
C. Equations d'Appel
1 2§ = | . 12 b z'
U = - |(12 KX + 3 K2)(z - zQ)2
â>*= tc1+^-]r*
^ -oôz» ~ Qz
[mj + ( v/J - I)2m4 + ( \/3 + I)2m5 + 2m3]z" - 2m zYj2 =
- 12 bz' -(12KJ + 3K2)(z-z0)
M = QSY^' v¥j
( \ /2+\ /3) 2 z2 _ ,[I, + (I4 + I5) —2 — + | m3 z2 ] Y»
(z+5_|l)2
1 ( N / 2 + ^/3)2 R->/3 ,fl C0
+ 2 t (I4 + V 2 ' ^-/f— +f m3 ^ «^i = Cl +-T( 2 + Y3)3 p(z)
© [JP.BROSSARD], [1994], INSA de Lyon, tous droits réservés.