mathematics, shape, computer vision
TRANSCRIPT


Mathematics, Shape, Computer Vision
• Introduction
• Contours (gradients etc)
• Alignments (Hough)
• Shape synthesis (Fourier etc.)
• Shape from X (Epipoles etc. etc.)
• Recognition (Transformation groups)
• Retrieval (Distances)
• Application: naevus/melanoma diagnosis
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 2/62

Introduction
Some mathematically minded textbooks:
• R. Hartley, A. Zisserman, Multiple View Geometry in Computer Vision, Cambridge University Press, 2004.
• E. Trucco, A. Verri, Introductory Techniques for 3-D Computer Vision, Prentice Hall 1998.
• O. Faugeras, Three-dimensional computer vision: a geometric viewpoint, MIT Press Cambridge, MA, USA 1993.
• Y. Ma, S. Soatto, J. Kosecka, S.S. Sastry, An Invitation to 3-D Vision: From Images to Geometric Models, Springer Verlag 2003.
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 3/62

Introduction
Computer vision (mainly) consists in techniques devoted to automatically obtain information on a 3D environment (called the scene) out of one or several images.
Applications:
• Biomedical App’s – Diagnosis – Surgical aids – Aids for the handicapped – …
• Industrial App’s – Inspection – Manipulation – …
•Optical Character Recognition •Remote sensing •Augmented reality •Robot navigation •Safety •Security •…
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 4/62

Introduction
The levels of Computer Vision
• Low level
– Extraction of elementary features
• Alignments
• Junctions
• …
– Segmentation
• Contours
• Regions
– Textures
– …
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 5/62

Introduction
• Middle level – Correspondences
• Stereo
• Motion
– Shape • Representation
• Topology
• Distances
– Geometry • Convexity
• Visibility
• Decompositions
• Invariants
• Transforms
–3D • Shape from
– Shading
– Texture
– Motion
– Stereovision
– Defocussing
• Active vision – Interferometry
– Structured light
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 6/62

Introduction
• High level – Recognition
– Pose estimation
– Retrieval
– Description
– Man-machine interaction
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 7/62

Introduction
• Continuous model
f: D R, (D Rn)
x D 0 ≤ f(x) ≤ M
• Discrete image
– Sampling (finite point set)
– Quantizing (finite value set)
– Tessellation (pixels)
– Representation (bits)
What is an image?
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 8/62

Introduction
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 9/62

Introduction
Continuous model:
Convolution of function f with kernel h is defined as:
A very useful tool: Convolution
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 10/62

Introduction
Discrete model:
Functions are substituted by matrices and integrals by sums.
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 11/62

Introduction
An example: smoothing by a Gaussian (for getting rid of noise).
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 12/62

Introduction
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 13/62

Mathematics, Shape, Computer Vision
• Introduction
• Contours (gradients etc)
• Alignments (Hough)
• Shape synthesis (Fourier etc.)
• Shape from X (Epipoles etc. etc.)
• Recognition (Transformation groups)
• Retrieval (Distances)
• Application: naevus/melanoma diagnosis
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 14/62

Contours (gradients etc)
In order to deal with objects, one has first to isolate them from background.
One way is by finding contours.
A different strategy focusses on regions.
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 15/62

Contours (gradients etc)
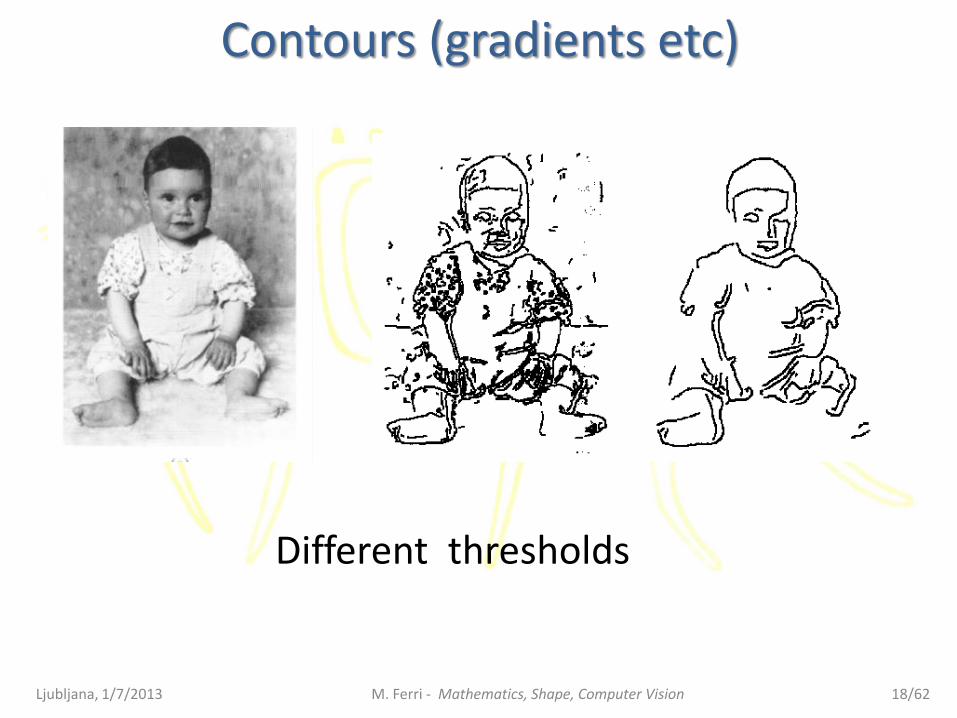
In order to detect contours, one finds the pixels where the norm of the gradient of f exceeds a given threshold:
Partial derivatives are obtained by convolution. Various masks are available.
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 16/62

Contours (gradients etc)
Canny Sobel Roberts
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 17/62
Contours (gradients etc)
Different thresholds
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 18/62

Contours (gradients etc)
A different strategy: zero crossings of the Laplacian
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 19/62

Contours (gradients etc)
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 20/62

Contours (gradients etc)
(Apparent) contour: the projection of the rim, i.e. of the locus of critical points of the projection itself.
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 21/62
Contours (gradients etc)
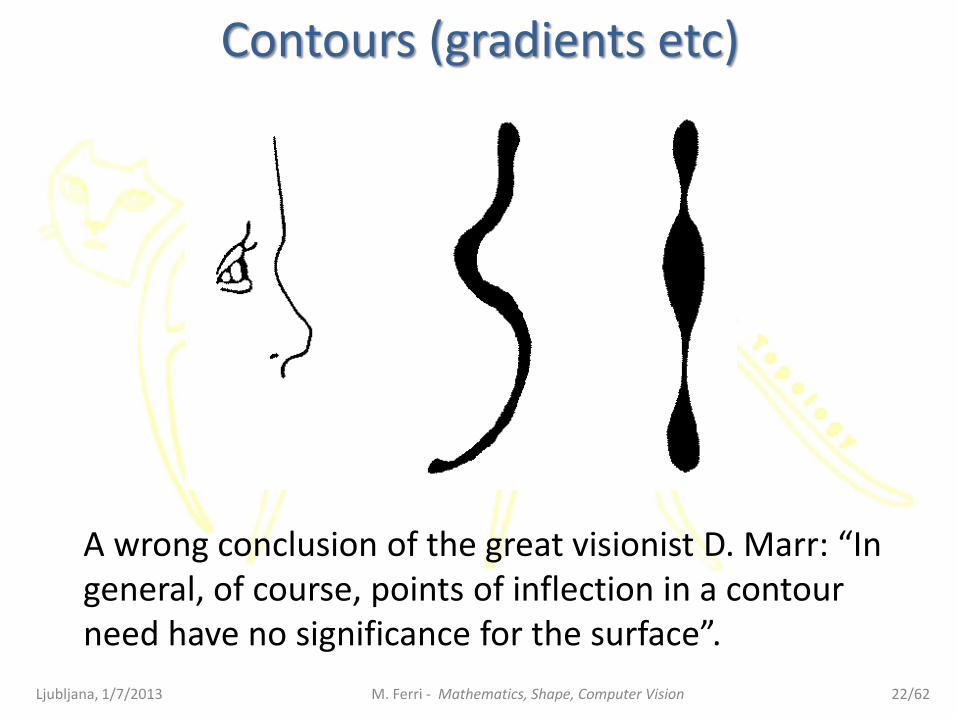
A wrong conclusion of the great visionist D. Marr: “In general, of course, points of inflection in a contour need have no significance for the surface”.
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 22/62

Contours (gradients etc)
On the contrary, the inflection points of the contour correspond to points of 0 Gaussian curvature of the surface!
J.J. Koenderink, What does the occluding contour tell us about solid shape? Perception 31 (1984), 321-330
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 23/62

Contours (gradients etc)
Contours can be very informative on the topology of the observed surface.
Whitney, Haefliger, Koenderink, Weiss & Callahan, Pignoni, Edelsbrunner Morozov & Patel,…
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 24/62

Contours (gradients etc)
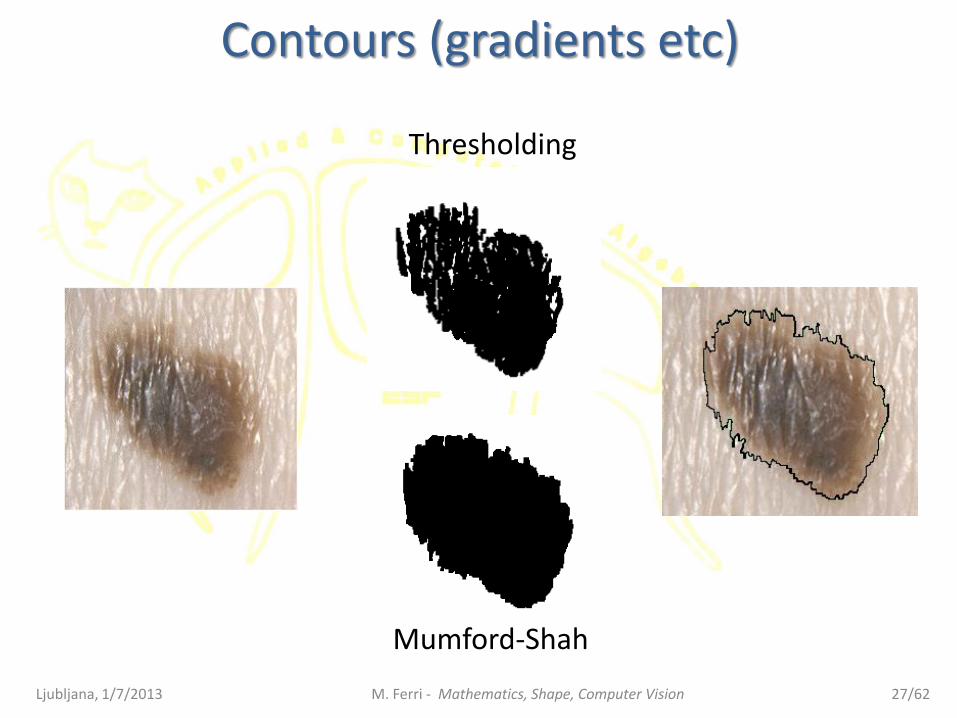
Alternatively to contour extraction, one can focus on region growing.
Problem: substitute grey tone function f with a function h close to f, with smaller gradient (piecewise constant, if possible), with small length of the discontinuity curves
Solution: find h and which minimize a suitable functional.
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 25/62

Contours (gradients etc)
The Mumford-Shah functional
D. Mumford1, J. Shah, Optimal approximations by piecewise smooth functions and associated variational problems, Comm. Pure Appl. Math.42 (1989), 577–685.
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 26/62
Contours (gradients etc)
Thresholding
Mumford-Shah
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 27/62

Contours (gradients etc)
A variant of the Mumford-Shah functional for image restoration: The subset D of nonreliable pixels is excluded from minimization. M. Nitzberg, D. Mumford, T. Shiota, Filtering, Segmentation and Depth. LNCS 662, Springer 1993
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 28/62

Contours (gradients etc)
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 29/62

Mathematics, Shape, Computer Vision
• Introduction
• Contours (gradients etc)
• Alignments (Hough)
• Shape synthesis (Fourier etc.)
• Shape from X (Epipoles etc. etc.)
• Recognition (Transformation groups)
• Retrieval (Distances)
• Application: naevus/melanoma diagnosis
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 30/62

Alignments (Hough)
Problem: Determine the straight lines on which the image elements are mainly aligned.
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 31/62

Alignments (Hough)
A solution: each image point P “votes” points in the dual Hough plane (where each point represents a straight line). It votes points representing lines through P.
The points of the Hough plane, which got most votes, represent lines of the image planes on which most points lie.
Practically, in the Hough plane: • Threshold • Find clusters.
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 32/62

Alignments (Hough)
P.V.C. Hough, Machine Analysis of Bubble Chamber Pictures, Proc. Int. Conf. High Energy Accelerators and Instrumentation, 1959
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 33/62

Alignments (Hough)
Hough transform with 40% threshold
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 34/62

Alignments (Hough)
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 35/62

Alignments (Hough)
It can be generalized to other parametrized spaces of curves
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 36/62

Alignments (Hough)
32 m. paraboloid
E-W, N-S arrays
Radiotelescope “North Cross”, Istituto Nazionale di Astrofisica, SETI Project
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 37/62

Alignments (Hough)
Spectrometer “Serendip IV”:
Bandwidth: 15 MHz
Channels: 25.165.800
The output consists in matrices
with columns corresponding to
channels and rows to sampling
times.
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 38/62

Alignments (Hough)
How to recognize an ET signal in the time-frequency matrices?
Its “signature” is the Doppler effect due to rotation/revolution. In the output matrices the signal appears as piecewise sinusoidal.
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 39/62

Alignments (Hough)
Signal received on July 7,1998 by the radiotelescope “North Cross”
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 40/62

Alignments (Hough)
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 41/62

Mathematics, Shape, Computer Vision
• Introduction
• Contours (gradients etc)
• Alignments (Hough)
• Shape synthesis (Fourier etc.)
• Shape from X (Epipoles etc. etc.)
• Recognition (Transformation groups)
• Retrieval (Distances)
• Application: naevus/melanoma diagnosis
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 42/62

Shape synthesis (Fourier etc) Under suitable continuity and integrability
conditions, given a function f: RC there exists its Fourier transform F: R C
Luckily, we can recover f from F:
The Fourier transform reorganizes data in the frequency domain.
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 43/62
Shape synthesis (Fourier etc)
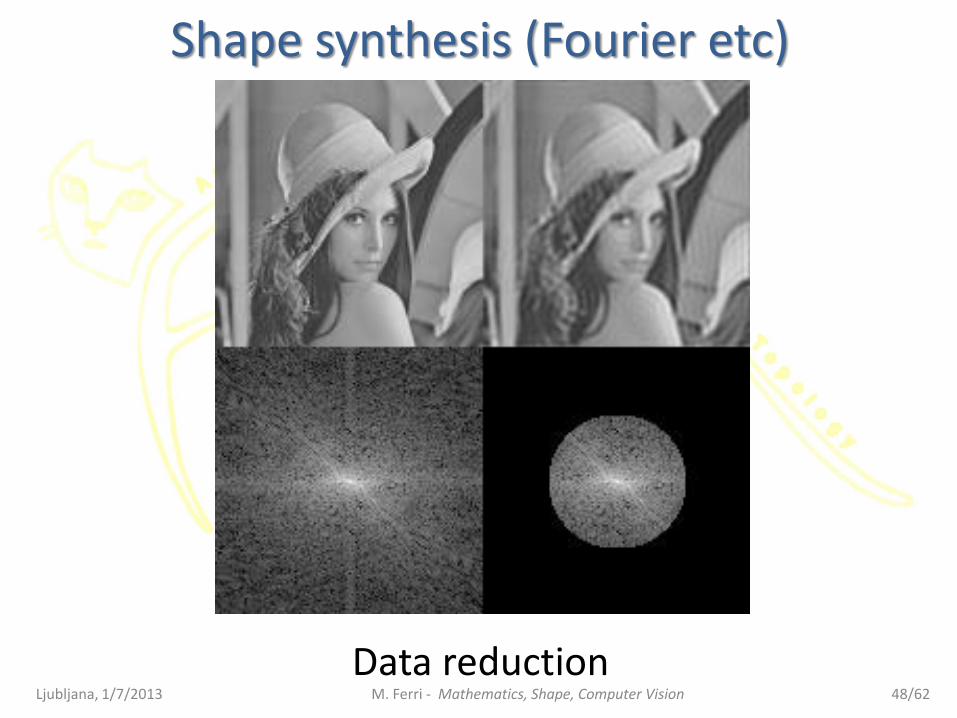
In the graphical representations of the Fourier transform of f, what is normally plotted is the amplitude function of F, called the Fourier spectrum of f. The transform of a 2D signal (typically an image) can be performed in two stages, along two coordinates in sequence.
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 44/62

Shape synthesis (Fourier etc)
Periodic functions (above) and their Fourier transforms
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 45/62

Shape synthesis (Fourier etc)
Elimination of undesired frequencies Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 46/62

Shape synthesis (Fourier etc)
Focussing Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 47/62
Shape synthesis (Fourier etc)
Data reduction Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 48/62

Shape synthesis (Fourier etc)
What about a discrete version of the Fourier transform of f : RC ? Answer: Given N equally spaced samples (for simplicity x=0,...,N-1), an approximation of the Fourier transform of f is:
Conversely, given a suitable sampling of F one obtains an approximation of f:
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 49/62

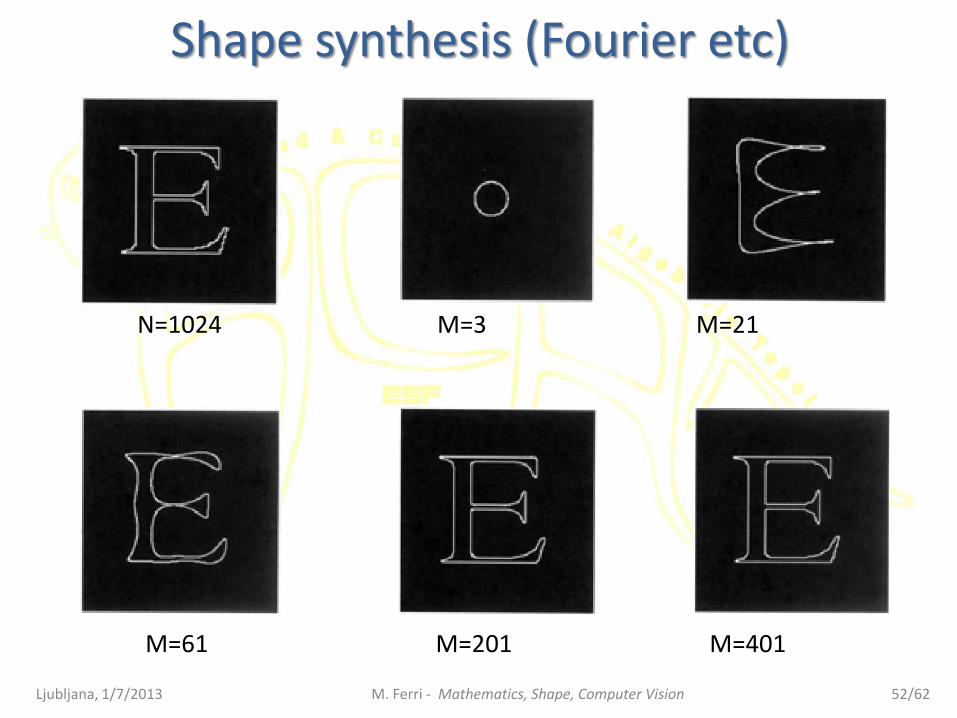
Shape synthesis (Fourier etc) This can be used to synthesize a Jordan curve C. Let C be regularly sampled by N points (x0, y0), …, (xN-1, yN-1); they can be seen as complex numbers sk=xk+iyk. Now apply the discrete Fourier transform:
The numbers a(u) are called Fourier descriptors of the curve C (better: of the approximating polygonal).
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 50/62

Shape synthesis (Fourier etc)
The original points are recovered so:
But if you use only the descriptors relative to the lowest frequencies, you get a curve C’ which is smoother than C but fairly similar to it.
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 51/62
Shape synthesis (Fourier etc)
N=1024 M=3 M=21
M=61 M=201 M=401
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 52/62

Shape synthesis (Fourier etc)
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 53/62

Shape synthesis (Fourier etc)
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 54/62

Shape synthesis (Fourier etc) A different base change is used for face recognition and retrieval with the “eigenfaces” of a covariance matrix
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 55/62

Shape synthesis (Fourier etc)
Original 98x98 3x3 5x5
11x11 15x15 20x20
Information carried by pixel sampling Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 56/62

Shape synthesis (Fourier etc)
Information carried by coefficients of eigenvectors
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 57/62

Shape synthesis (Fourier etc)
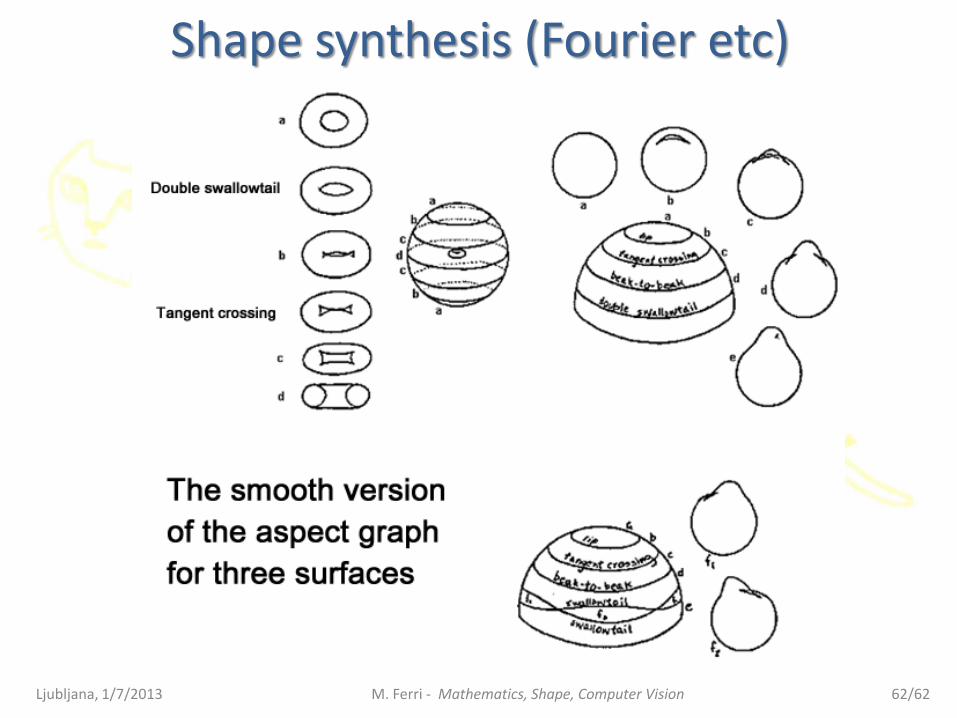
A combinatorial synthesis of the shape of a polyhedron is given by the aspect graph. An aspect is the set of faces which can be seen from a given direction. Vertices are the aspects, and two aspects are adjacent if and only if one can go continuously from one to the other.
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 58/62

Shape synthesis (Fourier etc)
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 59/62

Shape synthesis (Fourier etc)
Any two images corresponding to the same aspect are related together by piecewise homographies. There is a smooth version, in which equivalent images are related together by diffeomorphisms of the contours. The Gaussian sphere is then divided into regions of directions yielding equivalent images. Transition curves can be labelled by “catastrophes”.
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 60/62

Shape synthesis (Fourier etc)
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 61/62
Shape synthesis (Fourier etc)
Ljubljana, 1/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 62/62


Mathematics, Shape, Computer Vision
• Introduction
• Contours (gradients etc)
• Alignments (Hough)
• Shape synthesis (Fourier etc.)
• Shape from X (Epipoles etc. etc.)
• Recognition (Transformation groups)
• Retrieval (Distances)
• Application: naevus/melanoma diagnosis
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 2/77

Shape from X (epipoles etc etc)
There is quite a lot of techniques for guessing shape out of particular image features. E.g.
• stereo • shading • structured light • motion • focussing/defocussing • zooming • laser range finding • texture • ...
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 3/77

Shape from X (epipoles etc etc)
Shape from stereo
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 4/77

Shape from X (epipoles etc etc)
The scene point P, of coordinates (X,Y,Z) projects point p of coordinates (x,y) on the image plane. The relation between coordinates depends on the focal length f:
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 5/77
Shape from X (epipoles etc etc)
As a first, simplified stereo setting, consider a pair of cameras with overlapping image planes. So the optical axes are parallel. Assume also that the focal length is the same for both. Fix a Cartesian frame for each camera, so that the abscissa axes coincide with the straight line connecting the vantage points.
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 6/77

Shape from X (epipoles etc etc)
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 7/77

Shape from X (epipoles etc etc)
Any scene point P projects to a point pl in the left image and to a point pr on the right image. The disparity d= xr – xl is the variable which allows us to compute the depth Z of point P. From the similar triangles OlOrP and plprP one gets
whence
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 8/77

Shape from X (epipoles etc etc)
For a single point, computation is simple, once the stereo base T is known. The real problem is another: It is the matching problem, i.e. to understand which points in the right image correspond to which points in the left image. Search for matching pair is generally performed by comparing neighborhoods.
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 9/77

Shape from X (epipoles etc etc)
A big help (when the image planes are at an angle) comes from the epipolar constraint: Given a point p in the left image, the search for a match in the right image can be limited to the epipolar line which corresponds (under a computable projectivity) to the epipolar line containing p.
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 10/77

Shape from X (epipoles etc etc)
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 11/77

Shape from X (epipoles etc etc)
To be precise, the homogeneous coordinates Xr and Xl of matching points are conjugated:
XrT E Xl = 0
where E is obtained as follows. Let xl = R xr + T be the orthogonal Cartesian frame transformation; then E = RT S with
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 12/77

Shape from X (epipoles etc etc)
Shape from shading
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 13/77

Shape from X (epipoles etc etc)
Image irradiance E(P): light power per area unit received at the image point p.
Scene radiance L(P): light power per area unit emitted at the scene point P in direction d.
Lambertian surface: a surface whose radiance is constant w.r.t. direction d.
I(P): vector with the direction of incident light at P, and modulus equal to the incident light power per area unit.
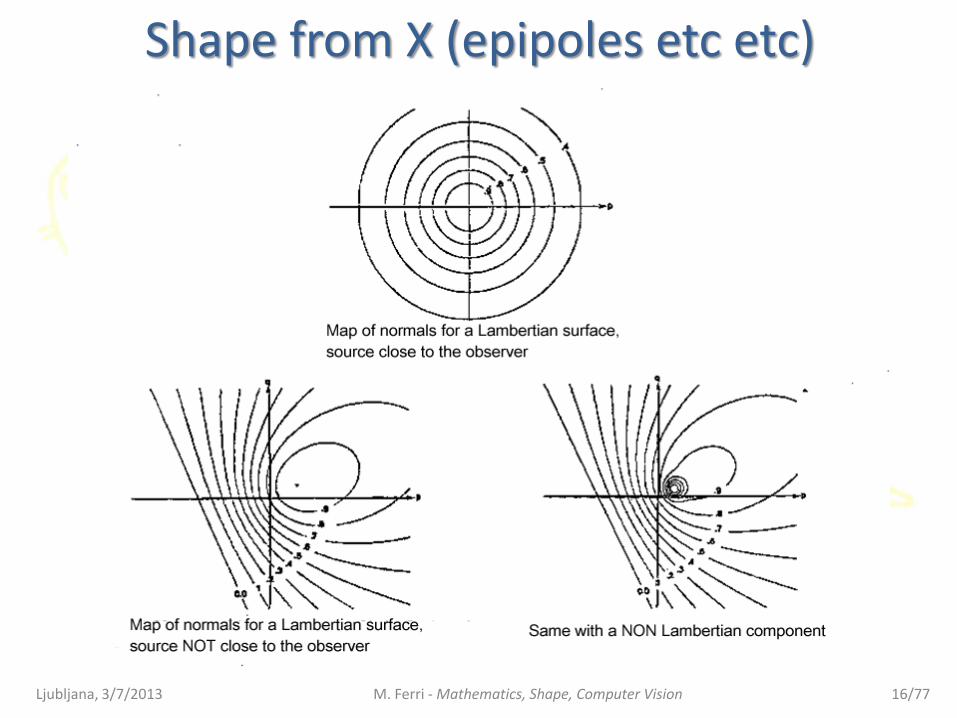
N(P): normal versor at P. Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 14/77

Shape from X (epipoles etc etc)
For a Lambertian surface: L(P) = I(P)Tn(P)
where the albedo ρ is a positive constant. Then
where d is the lens diameter, f is the focal length and α is the (small) angle between pP and the optical axis. So, with good approximation, E(p) is proportional to I(P)Tn(P).
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 15/77
Shape from X (epipoles etc etc)
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 16/77

Shape from X (epipoles etc etc)
The possible normal directions at P form a whole cone, so observing a single point cannot reveal the normal direction. But we generally see a whole region; if there is a point where the normal is known, then we can get the normals of all points of the region.
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 17/77

Shape from X (epipoles etc etc)
When lighting is controlled, another strategy is possible: one lights up the object of interest with three different light sources. Each produces a cone of potential normals at each point; the intersection of the three cones is the true normal. Knowledge of normals and face areas (for polyhedra) and of Gaussian curvatures (for smooth surfaces) makes a complete reconstruction possible (convex case)!
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 18/77

Shape from X (epipoles etc etc)
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 19/77

Shape from X (epipoles etc etc)
Theorem (Minkowski, 1897) – Given two convex polyhedra in Euclidean 3D space, if a bijection between their face sets exists, such that corresponding faces have the same normal and same area, then the polyhedra are congruent. (Note that the equality of the numbers of edges for the corresponding faces is not requested: It comes by itself!)
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 20/77

Shape from X (epipoles etc etc)
Luckily, there is a smooth version of the theorem: Theorem (Aleksandroff, 1942) – Given two convex solid bodies in Euclidean 3D space, if a bijection between their boundaries exists, such that corresponding points have the same normal and same Guassian curvature, then the solid bodies are congruent.
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 21/77

Shape from X (epipoles etc etc)
In practice, knowledge of the depth of one point and the direction (a,b,-1) of the normal at each point yields the depth of the other points of the region by integration:
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 22/77

Shape from X (epipoles etc etc)
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 23/77

Shape from X (epipoles etc etc)
Shape from structured light
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 24/77

Shape from X (epipoles etc etc)
In controlled environments, it is possible to project a blade of light or a grid on the object of interest. The deformation imposed by the surface gives information on the local shape. Actually, structured light can be brought back to stereo, since the nondeformed grid can be considered as the second image. The problem of matching, however, comes again into play.
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 25/77

Shape from X (epipoles etc etc)
A tentative disambiguating grid
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 26/77

Shape from X (epipoles etc etc)
A texture – even a not too regular one – plays much the same rôle as structured light. Its deformation on a surface gives again information on the normal direction. (This is – at least intuitively – well-known to fashion designers)
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 27/77

Shape from X (epipoles etc etc)
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 28/77

Shape from X (epipoles etc etc)
An interesting variation in structured light is the use of moiré fringes, interference patterns that one gets by projecting a very thin and dense grid, and interjecting an analogous grid on the lens. The fringes are level curves of a Morse function defined on the surface. Their singular points then carry topological information on the surface itself.
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 29/77

Shape from X (epipoles etc etc)
Attention gets focused on the singular points. They correspond to critical points of the function, and show their indices.
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 30/77

Mathematics, Shape, Computer Vision
• Introduction
• Contours (gradients etc)
• Alignments (Hough)
• Shape synthesis (Fourier etc.)
• Shape from X (Epipoles etc. etc.)
• Recognition (Transformation groups)
• Retrieval (Distances)
• Application: naevus/melanoma diagnosis
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 31/77

Recognition (transformation groups)
The simplest type of shape recognition is by superimposition: One tries to deform a template into the given image. Problem: Different environments imply different transformation groups; the wider the group, the greater is the freedom, but also the computational complexity, due to a greater number of parameters.
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 32/77

Recognition (transformation groups)
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 33/77

Recognition (transformation groups)
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 34/77

Recognition (transformation groups)
translation movement conserving a direction
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 35/77

Recognition (transformation groups)
movement(direct congruence): det>0
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 36/77

Recognition (transformation groups)
congruence: nonvanishing det
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 37/77

Recognition (transformation groups)
similitude
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 38/77

Recognition (transformation groups)
affinity
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 39/77

Recognition (transformation groups)
homography
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 40/77

Recognition (transformation groups)
homeomorphism Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 41/77

Recognition (transformation groups)
homeomorphism
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 42/77

Recognition (transformation groups)
But here there is a homeomorphism too!
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 43/77

Recognition (transformation groups)
Instead of superimposing the images themselves, one can extract from the image invariants with respect to the given transformation groups. E.g. lengths and angles are invariant under movements; angles and length ratios under similitudes; area ratios under affinities.
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 44/77

Recognition (transformation groups)
An important invariant under similitudes is the form factor C=4πA/P2 (A area, P perimeter). An affine invariant for triples of collinear points B,C,D is the simple ratio d(B,D)/d(C,D). For homographies we have the cross ratio of four collinear points d(B,D)d(C,E)/d(C,D)d(B,E)
As for homeomorphisms, the whole body of Algebraic Topology is expressly dedicated to the construction and study of suitable topological invariants.
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 45/77

Recognition (transformation groups)
A very general setting with practical applications in shape recognition is Persistent Topology, initiated in the ’90s with the name of Size Theory. It tries to answer a rather philosophical type of question: What is shape?
P. Frosini Measuring shapes by size functions, Proc. of SPIE, Intelligent Robots and Computer Vision X: Algorithms and Techniques, Boston, MA, 1991, vol. 1607.
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 46/77

Recognition (transformation groups)
Which object has “the same shape” as the upper circle? In our opinion, this depends on the observer (his/her viewpoint, interest, tasks…).
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 47/77
Recognition (transformation groups)
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 48/77
Recognition (transformation groups)
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 49/77

Recognition (transformation groups)
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 50/77

Recognition (transformation groups)
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 51/77

Recognition (transformation groups)
similitudes Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 52/77

Recognition (transformation groups)
affinities
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 53/77

Recognition (transformation groups)
homographies
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 54/77

Recognition (transformation groups)
homeomorphisms
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 55/77

Mathematics, Shape, Computer Vision
• Introduction
• Contours (gradients etc)
• Alignments (Hough)
• Shape synthesis (Fourier etc.)
• Shape from X (Epipoles etc. etc.)
• Recognition (Transformation groups)
• Retrieval (Distances)
• Application: naevus/melanoma diagnosis
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 56/77

Retrieval (distances)
Search engines which search for images using images (instead of words) are already coming out of the early research stage. Whatever the shape representation they use, they obviously need smart distances.
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 57/77

Retrieval (distances)
How much do these two curves differ w.r.t. ordinate as a measuring function?
Our proposal: the minimum cost, in terms of f and f’, of transforming one into the other. Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 58/77

Retrieval (distances)
P. Frosini, M. Mulazzani, Size homotopy groups for computation of natural size distances, Bull. of the Belgian Math. Soc. - Simon Stevin, 6 (1999), 455-464.
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 59/77

Retrieval (distances)
But the natural pseudodistance is difficult (or even impossible) to compute. Therefore we need a computable lower bound for it. Luckily, we have it: the matching distance between the already seen Persistent Betti Number functions of the size pairs.
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 60/77

Retrieval (distances)
All information carried by a Persistent Betti Number function can be condensed in the formal series of its cornerpoints
The matching distance
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 61/77

Retrieval (distances)
It turns out that:
i.e. the matching distance between size functions yields a lower bound to the natural pseudodistance.
S. Biasotti, A. Cerri, P. Frosini, D. Giorgi, C. Landi Multidimensional size functions for shape comparison Journal of Mathematical Imaging and Vision 32 (2008), 161–179.
A. Cerri, B. Di Fabio, M. Ferri, P. Frosini, C. Landi Betti numbers in multidimensional persistent homology are stable functions Math. Meth. Appl. Sci. DOI: 10.1002/mma.2704 (2012).
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 62/77

Retrieval (distances)
We used it successfully for searching a database of randomly generated polygonals...
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 63/77

Retrieval (distances)
… a database of randomly generated smooth curves …
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 64/77
Retrieval (distances)
… a database of trade marks …
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 65/77

Retrieval (distances)
Query 1 2 3
… and a public database of sea fauna.
CSS
CSS
our system
our system
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 66/77
Mathematics, Shape, Computer Vision
• Introduction
• Contours (gradients etc)
• Alignments (Hough)
• Shape synthesis (Fourier etc.)
• Shape from X (Epipoles etc. etc.)
• Recognition (Transformation groups)
• Retrieval (Distances)
• Application: naevus/melanoma diagnosis
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 67/77

Application: naevus/melanoma diagnosis
Melanocytic lesion images acquired under polarized light and mild magnification.
• Goal: distinction between naevus and melanoma
• Problems:
– No template for either class
– Various diagnostic criteria
– Morphological analysis not always sufficient
– Processing speed compatible with medical consulting room environment
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 68/77

Application: naevus/melanoma diagnosis
We concentrated on the search for asymmetries of
• boundary shape
• color distribution
• pattern distribution.
This is performed for each lesion as follows.
We take a bundle of 45 lines through the center of mass, and for each we compare the two halves of the lesion, separated by the line.
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 69/77

Application: naevus/melanoma diagnosis
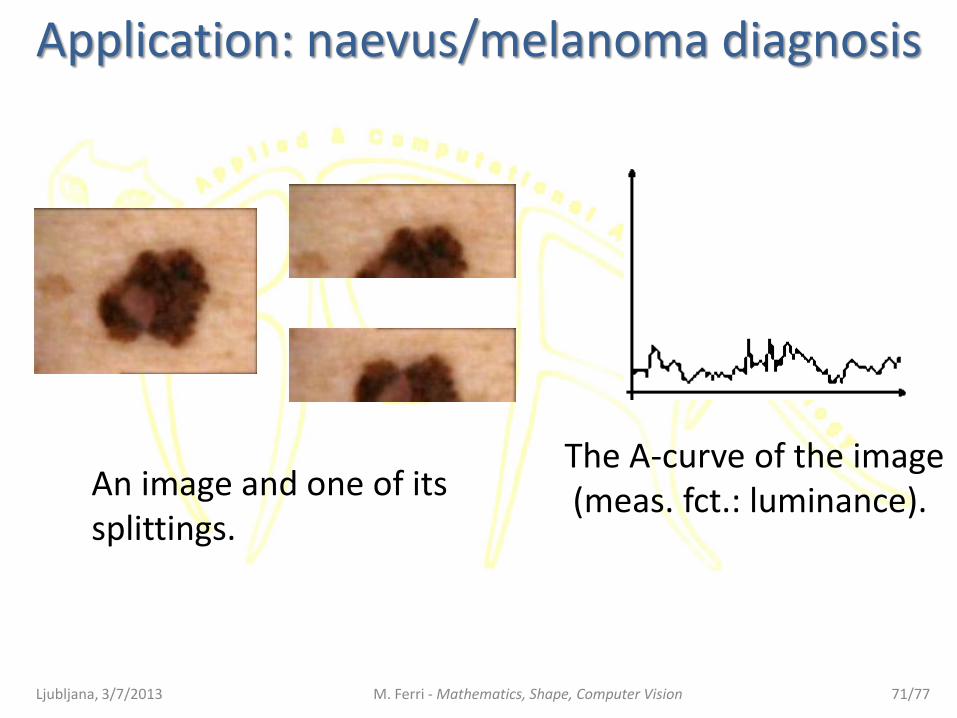
Instead of making a geometric comparison (e.g. by superimposition) we performed a qualitative comparison by computing the distance of 0-PBN’s of the two halves.
The chosen measuring functions are: • distance from the splitting line • sum of luminance along segments • sum of color variations along segments.
Then, the distances from all splittings are gathered into a
function (called A-curve) of which some classical invariants
(one for each A-curve) are computed.
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 70/77
Application: naevus/melanoma diagnosis
An image and one of its splittings.
The A-curve of the image (meas. fct.: luminance).
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 71/77

Application: naevus/melanoma diagnosis
From this curve the software extracts min, max, average, min plus the value at 90° from min, integral, first moment, variation, min derivative, max derivative, integral of absolute value of derivative, variation of absolute value of derivative.
A Support Vector Machine with a 3rd order kernel is fed with these numbers, computed for each measuring function.
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 72/77
Application: naevus/melanoma diagnosis
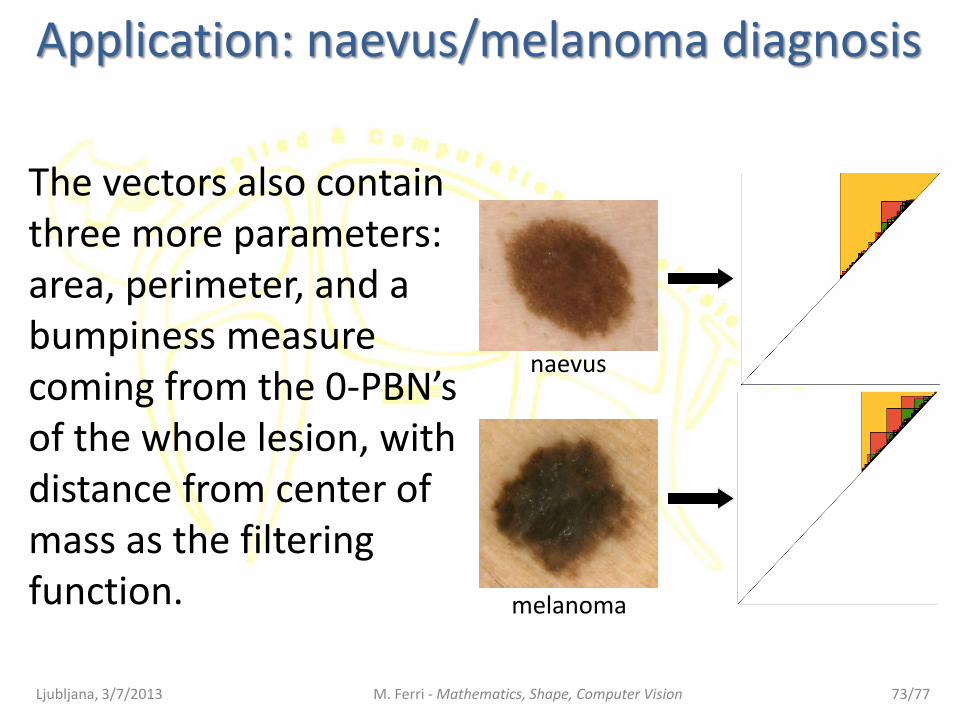
melanoma
naevus
The vectors also contain three more parameters: area, perimeter, and a bumpiness measure coming from the 0-PBN’s of the whole lesion, with distance from center of mass as the filtering function.
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 73/77

Application: naevus/melanoma diagnosis
Experimentation
The data set contains 50 melanomas and 927 naevi. Receiver Operating Characteristic (ROC) curve: It plots Sensitivity vs. (1-Specificity)
M. Ferri, I. Stanganelli, Size functions for the morphological analysis of melanocytic lesions, Int. J.
Biomed. Imaging 2010 (2010), Article ID 621357, doi:10.1155/2010/621357
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 74/77

Application: naevus/melanoma diagnosis
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 75/77

Application: naevus/melanoma diagnosis
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 76/77

THANKS FOR YOUR ATTENTION !
http://vis.dm.unibo.it
Ljubljana, 3/7/2013 M. Ferri - Mathematics, Shape, Computer Vision 77/77