march 20111 trapezoidal maps shmuel wimer bar ilan univ., school of engineering
TRANSCRIPT

March 2011 1
Trapezoidal Maps
Shmuel Wimer
Bar Ilan Univ., School of Engineering
March 2011 2
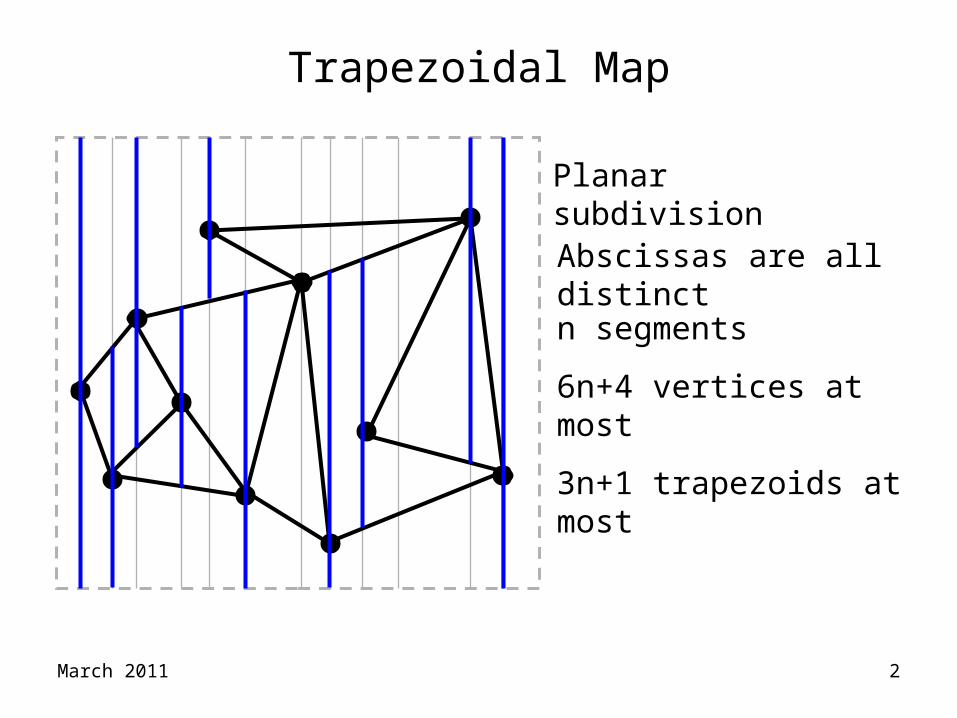
Trapezoidal Map
Planar subdivision
Abscissas are all distinct
n segments
6n+4 vertices at most
3n+1 trapezoids at most

March 2011 3
leftPoint
top
bottom
leftPoint top
bottom
leftPoint
top
bottom
leftPoint
top
bottom
Trapezoidal map can be constructed in O(nlogn) time
by a scan-line algorithm.

March 2011 4
Randomized Incremental Algorithm
1 - trapezoidal map of a set of line
segments with distinct abscissae of end points.
n
i iS S s
T
The algorithm builds a by-product data structure
supporting point location queries in .S SD T
An advantage over construction by scan-line which
doesn't yield query supporting data structure.

March 2011 5
Inner nodes have degree 2
1p1q1s
2p
2q2s
A
B
C
D E G
F
ST
1p
1qA
2q
G2s
E
F
2S
D
2p
1s
C
B
x-node
y-node
trapezoid
SD
Trapezoids of and leaves of are interlinked by pointersS ST D

March 2011 6
1p1q1s
2p
2q2s
A
B
C
D E G
F
1p
1qA
2q
G2s
E
F
2S
D
2p
1s
C
B
Does q lie to the left or to the right ?
Does q lie above or below?
Querying a point location

March 2011 7
Randomized Construction Algorithm
Segments are added to randomly, one at a time.ST
The structure of is affected by selection order.
Some orders may yield with bad query time of
, others may yield good query time of l .ogO n
S
S
O n
D
D
Expected query time is log and expected size
is !
O n
O n
2Some my be of large size , others may be
of size .
O nS
O n
D

March 2011 8
0 0
10
( ) {
bound by a rectang
// - non
le ;
crossing segments
initialeze and ;
( , 1 , randomly selected ) {
find
// Returns
,
,
an
,
d
i
ik j
S
S R
S
S S
s S i n
s
TrapezoidalMap
T
T D
D
T
for
10
1
;
remove , , and insert new
trapezoids in appearing by insertion ;
remove corresponding leaves from , create
leaves in for new trapezoids and interlink to
i
ik
ii
i
i
s
T
T
D
D ;
}
}
iT

March 2011 9
1
Two invariants of :
1) is a trapezoidal map of , , ,
2) is a valid search structure for .
ii i
i i
S s s
TrapezoidalMap
T
D T
0 0Initialization: , is a corresponding leaf.R T T D
1 1
0
To modify we query by searching in and
derive , , successively from left to right.
i ii
k
p
T D
1If is above , then is its lower-right
neighbor, otherwise it is upper right. (Abscissa uniqueness
ensures there are only two right-adjacent trapezoids).
j i js rightPoint
March 2011 10
is0 1
23
11
0
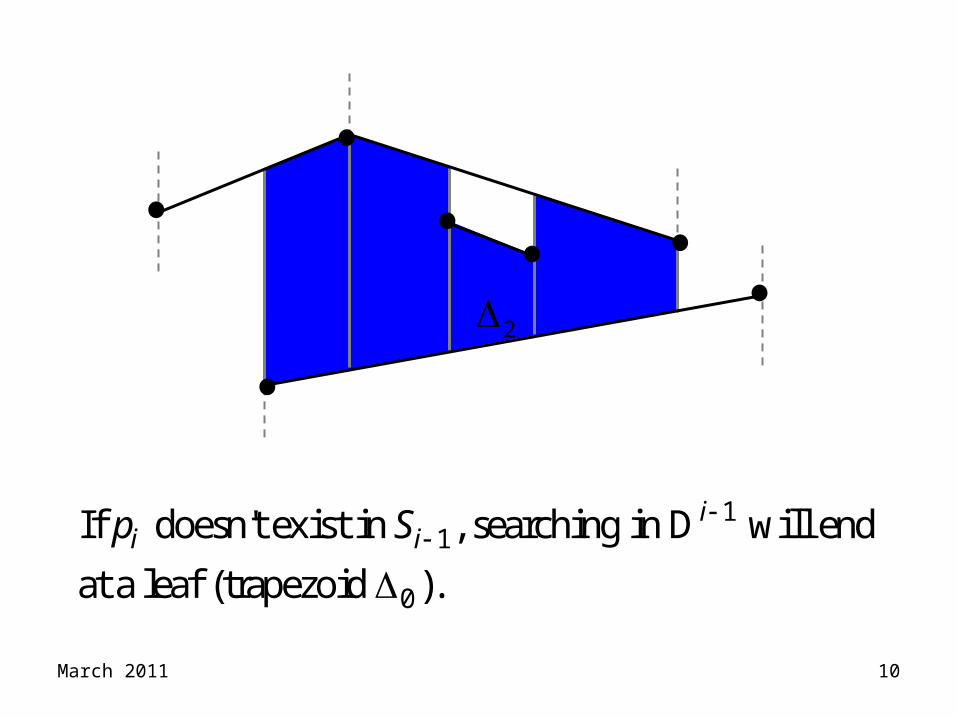
If doesn't exist in , searching in will end
at a leaf (trapezoid ).
ii ip S
D

March 2011 11
1
0
If exists in , it must meet an internal node. If it is
-node laying on a vertical line, proceeding query with
= obtaine .
i i
i i
p S
x
p p s
1
0
If it is -node, it must be a left point , . Slops
of and are compared and is decided accordingly.
j j i
i j
y p s S
s s
js i jp q
is
jsi jp p
is
0
0

March 2011 12
0
1 1
10
// Returns sequence , , inter
( , , : , ) {
search in to find ;
0 ;
( ) {
i
sected by
// progress rightward along
f
i ii i i
ii
i
ij
k
i
s p q
p
j
while sq
s
FollowSegment
T D
T
rightPoint
1
1
0
( is above )
{ is lower-right neighbor of }
else { is upper-right neighbor of }
++ ;
}
return sequence , , ;
}
j i
j j
j j
k
s
j
rightPoint

March 2011 13
isip iq
1iT
A
iT
BC
D
1iD
ip
iq
is B
A
DC
iD
1iD
New segment insertion

March 2011 14
The information attached to new trapezoids is their left
and right neighbor trapezoids, top and bottom segment
and points defining their left and right vertical segment.
If the information in Δ is properly stored, above info
can be determined in a constant time from si and Δ.
Assuming that a point is contained in Δ, the sub tree
replacing its leaf is sufficient to determine whether the
point is in A, B, C or D.
If pi=leftPoint(Δ) and / or qi=rightPoint(Δ), Δ is divided
into two or three trapezoids and sub-tree replacement is
simpler.

March 2011 15
A
iT
B
C
E
D
F
Intersection with more than one trapezoid
0Any of and that didn't exist partition and into
three trapezoids.i i kp q
is
ipiq
01iT1 2
3
0By using the information stored in , , , the vertical
extensions are shortened to incidence , consuming constant
time per trapezoid.
k
is

March 2011 16
A
iT
B
C
E
D
Fis
ipiq
01iT1 2
3
1iD
3210
iqis
B FD
E
1iD
is is
is
CA
iD

March 2011 17
0If and / or are internal points, leaf is
replaced with an internal -node pointing to a leaf
and a -node of which points to two leaves. Else,
a leaf is replaced by a -node pointing to tw
i i k
i
p q
x
y s
y
o leaves.
1 1The leaves of to are replaced with a -node
of pointing to two leaves.k
i
y
s
1The fact that different trapezoids in merge into
a single trapezoid in results few incoming arcs to
a leaf in .
i
i
i
T
T
D

March 2011 18
and its associated search structure
for line segments set , are constructed in
log expected time, occupying storage
and yielding expected query time of log .
S
S n S
O n n O n
O n
:Theorem T
D
A query traverses a path in from root
to a leaf (trapezoid).
S:Proof D
- the number of new nodes on the query path,
which have been created at insertion. , 1
are random variables satisfying 3.
i
i i
i
X
s X i n
X

March 2011 19
- probability that there exists a node on the search
path of , created at insertion. Therefore
0 1 3 .
i
i
i i i i i
P
q s
E X X P P P
1
The length of a search paths is obtained by summing
the random variables over all insertions, .
By linearity of expectation it follows that the expected
length of a search path is:
ni iiX X
1 1 E E .
n ni ii iX X

March 2011 20
1 1
1
1
- trapezoid after insertion of containing .
Therefore, Pr
Pr 4 .
q i i
i q i q i
iq i
S s q
P S S
S i
T
R.H.S follows from the observation that the probability
of to disappear by the removal of from is
4 at most since may participate in defining any of
its four border edges.
iq i i
i
S s
i s
T

March 2011 21
1 1 1 1
Putting everything togather, the expected length of
a query path is bounded by:
E 3 12 12 1 12n n n n
i i ni i i iX P i i H
1
1 1 1 is the -th harmonic number , which
1 2
satisfies ln ln 1 (recall that ln ).
n
n
n
H nn
n H n n dx x
In conclusion, query time is log .O n
To obtain the size of we'll bound its node count. SD

March 2011 22
leaves are in 1:1 correspondence with
trapezoids, whose number is bounded by .
S S
O n
D T
To bound the number of inner node let be the
mumber of new trapezoids created by insertion.
It follows by construction of that the number of
inner nodes is exactly 1.
i
i
i
k
s
k D
How many new trapezoids are in ? No more
than total number in which is bounded by ( ).
i
i O i
T
T
March 2011 23
2
1
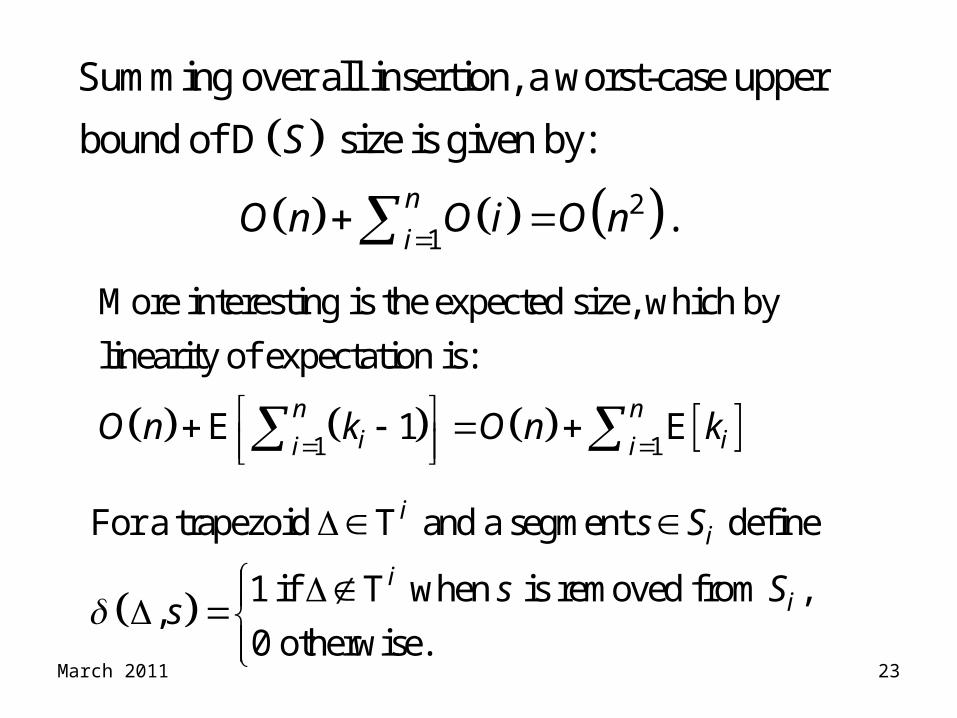
Summing over all insertion, a worst-case upper
bound of size is given by:
.n
i
S
O n O i O n
D
1 1
More interesting is the expected size, which by
linearity of expectation is:
E 1 En n
i ii iO n k O n k
For a trapezoid and a segment define
1 if when is removed from , ,
0 otherwise.
ii
ii
s S
s Ss
T
T
March 2011 24
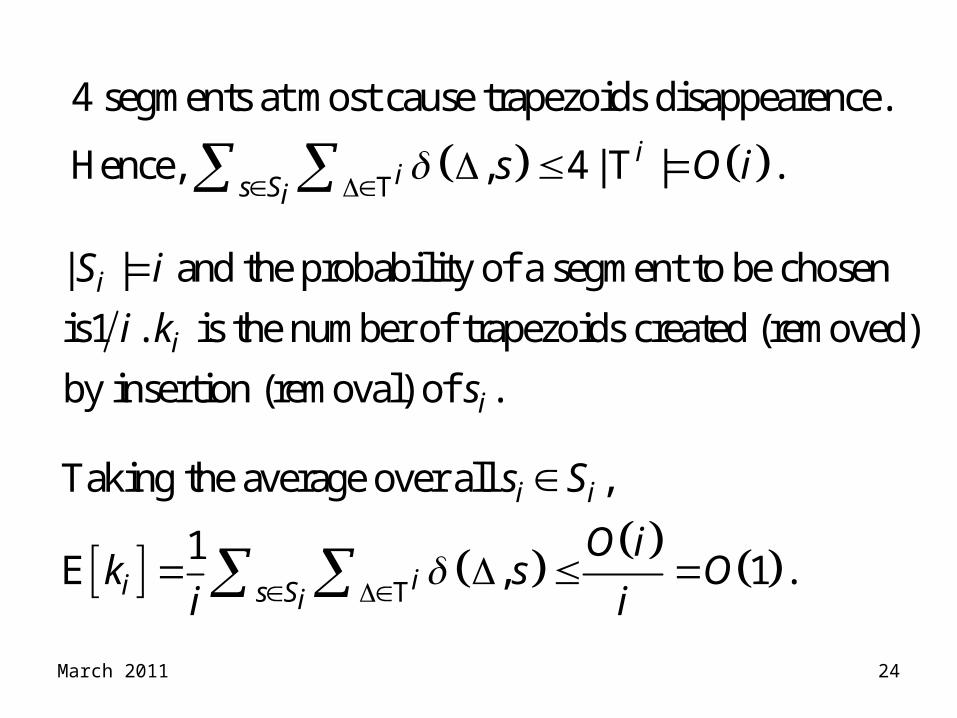
4 segments at most cause trapezoids disappearence.
Hence, , 4 | | .iis Si
s O i
TT
| | and the probability of a segment to be chosen
is1 . is the number of trapezoids created (removed)
by insertion (removal) of .
i
i
i
S i
i k
s
Taking the average over all ,
1E , 1 .
i i
ii s Si
s S
O ik s O
i i
T

March 2011 25
In conclusion the expected number of new trapezoids
created at a segment insertion is 1 .O
This yields storage bound.O n
Expected run time consists of 1 initialization
time, log quering to find at insertion,
and E 1 for internal nodes creation.
i i
i
O
O i p s
k O
This yields log creation time.O n n ■

March 2011 26
Given a set of segments, nothing is guaranteed on the
maximal run time, which can be quadratic.
Considering all possible problems of n segments, what
is the expected maximal query time?
O(logn)