magnetic manipulator
DESCRIPTION
Magnetic Manipulator. Team 125 Marley Rutkowski John Olennikov Benjamin Younce Chad Perkins Faculty Advisor: Dr. Robert Albright Industrial Advisor: Andy McConnell Client: Dr. Mark Utlaut. Our Project. GOAL: Achieve controlled levitation in 1D (or 2D) space - PowerPoint PPT PresentationTRANSCRIPT
Magnetic Manipulator Team 125
Marley Rutkowski John Olennikov Benjamin Younce Chad Perkins
Faculty Advisor: Dr. Robert Albright Industrial Advisor: Andy McConnell
Client: Dr. Mark Utlaut
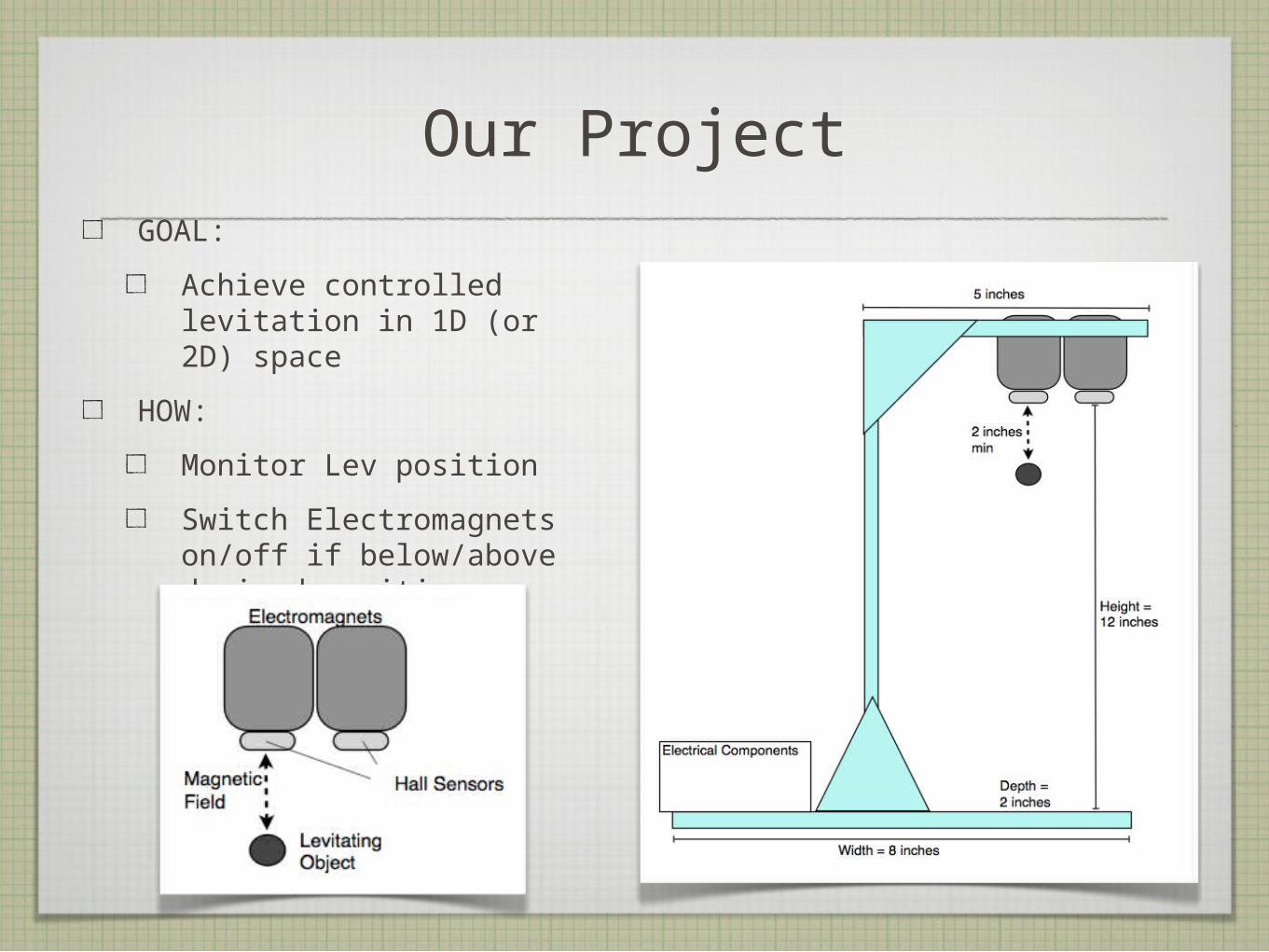
Our ProjectGOAL:
Achieve controlled levitation in 1D (or 2D) space
HOW:
Monitor Lev position
Switch Electromagnets on/off if below/above desired position
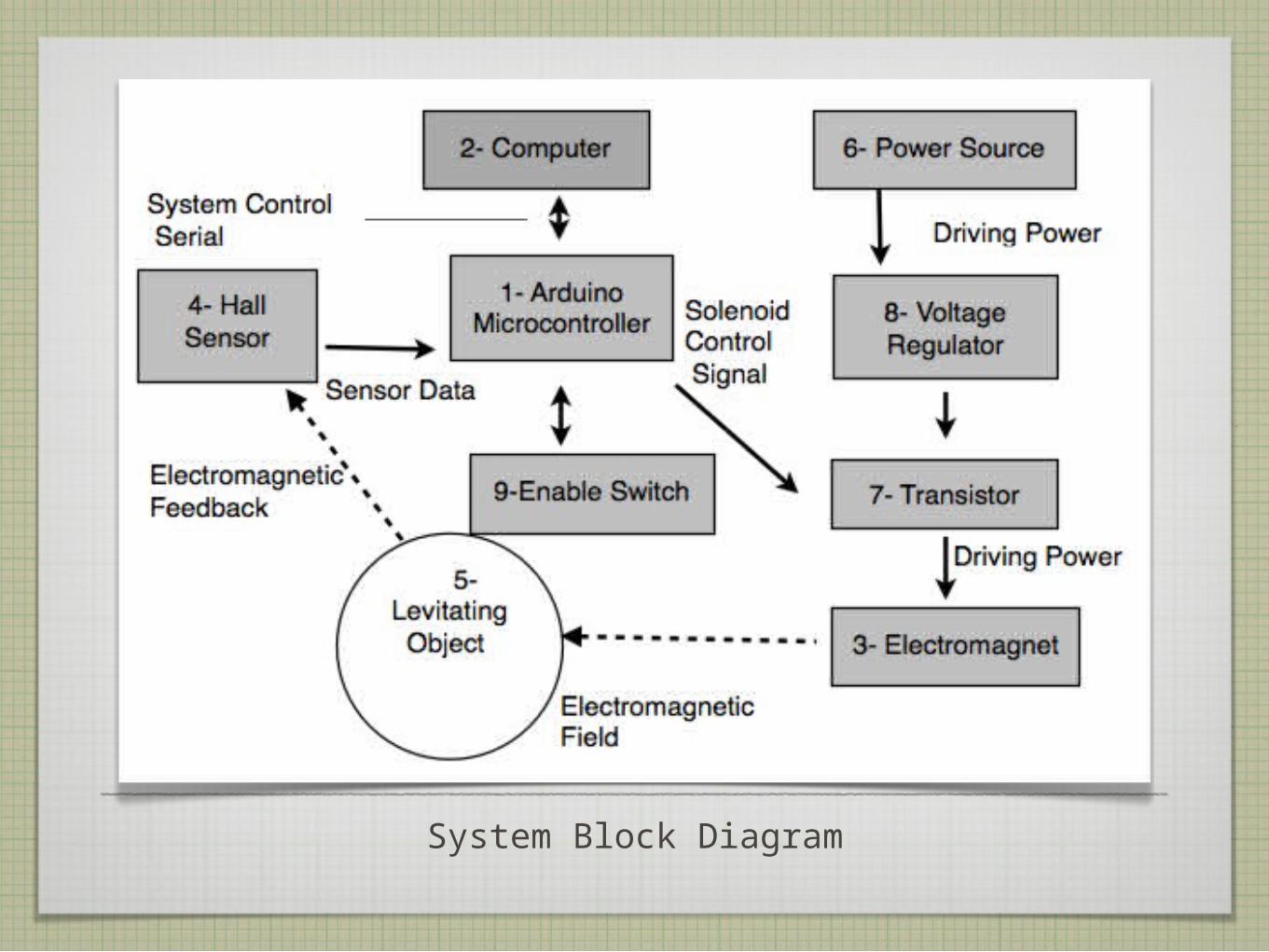
System Block Diagram

Design Challenges
Design and implement hardware and software to drive electromagnets and sense levitating object position
Experiment with system and optimize hardware and Arduino code for stable controlled levitation
Risks
Controlled levitation in 2D is more difficult to achieve than expected
Testing and optimization is difficult / takes too long
A part breaks or malfunctions

Primary Milestones
Fri 15 Nov - Complete Design Document Complete Final Budget
Fri 6 Dec - Finalize prototype plans. All parts purchased or ordered
Fri 24 Jan - Begin prototype build
Fri 7 Feb - Prototype build 100% complete. Begin testing/debugging of prototype
Fri 21 Feb - Have at least 1 dimensional movement working
Fri 04 Apr - Present Final Program Review with Demonstration. Complete Final Report
Tue 08 Apr - Present Founder’s Day (Project Presentation)
Questions? ;-)