lt1: development, calibration and validation of bus following model
TRANSCRIPT

LT1: Development, calibration and validation of bus-following model to support analysis and
evaluation of alternative BRT strategies under different scenarios
Luis Antonio Lindau
Paula Manoela dos Santos
Transit Leaders Roundtable MIT, June 2011
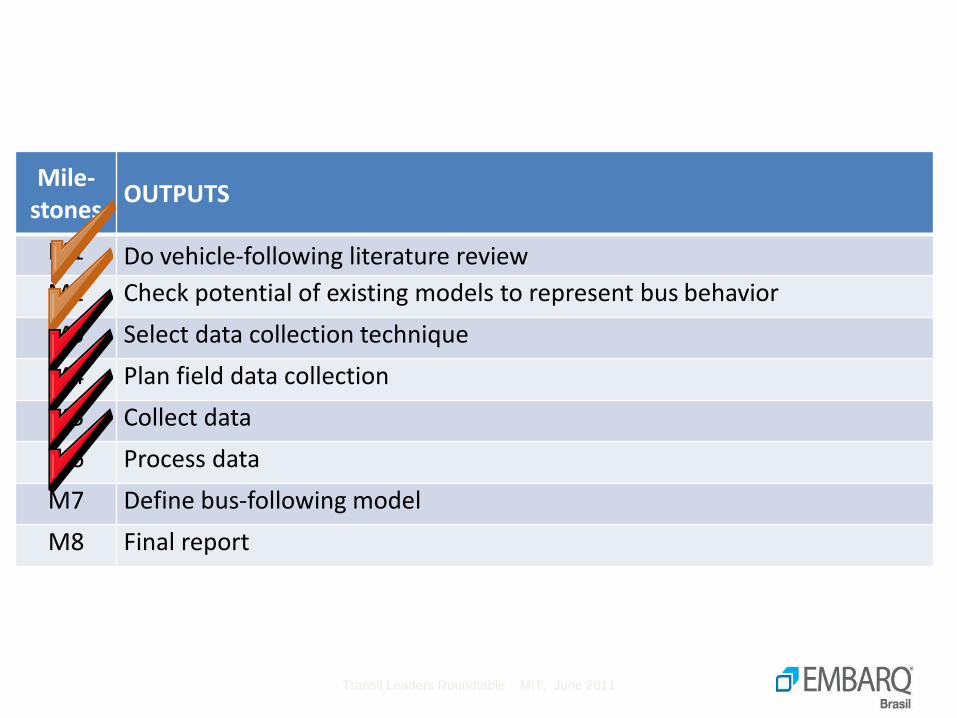
Mile-stones
OUTPUTS
M1 Do vehicle-following literature review
M2 Check potential of existing models to represent bus behavior
M3 Select data collection technique
M4 Plan field data collection
M5 Collect data
M6 Process data
M7 Define bus-following model
M8 Final report
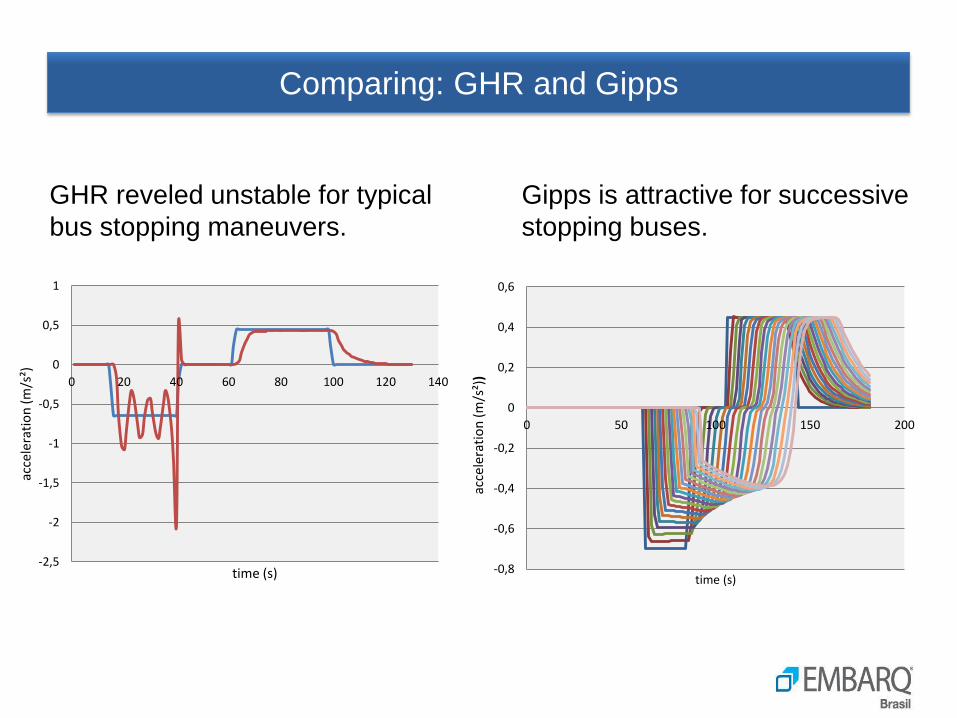
Comparing: GHR and Gipps
GHR reveled unstable for typical
bus stopping maneuvers.
-2,5
-2
-1,5
-1
-0,5
0
0,5
1
0 20 40 60 80 100 120 140
acce
lera
tio
n (
m/s
²)
time (s) -0,8
-0,6
-0,4
-0,2
0
0,2
0,4
0,6
0 50 100 150 200
acce
lera
tio
n (
m/s
²))
time (s)
Gipps is attractive for successive
stopping buses.
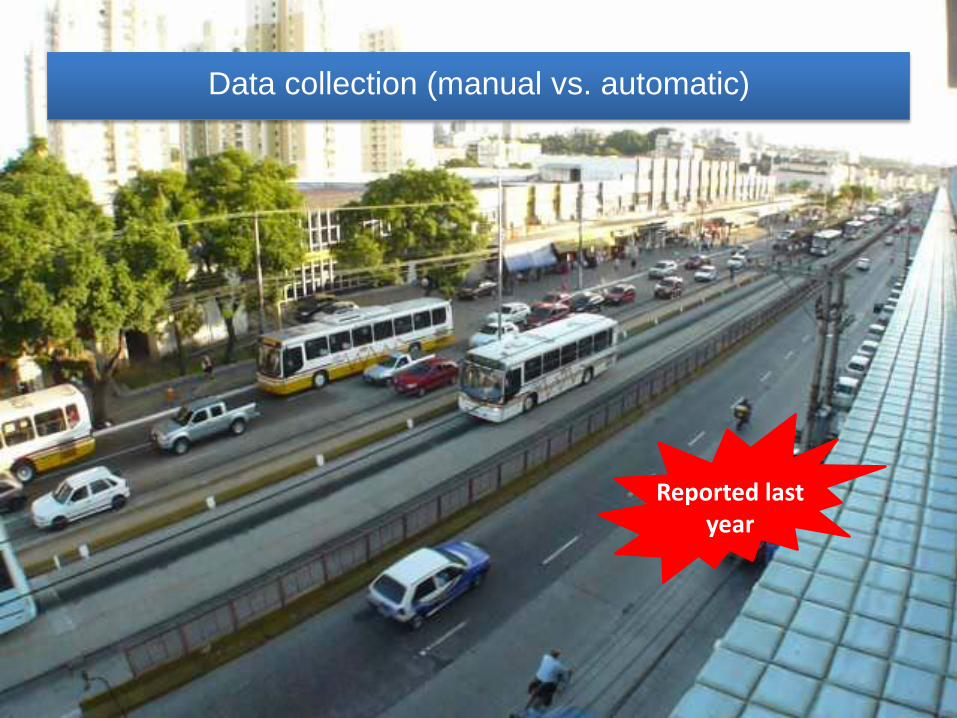
Data collection (manual vs. automatic)
Reported last year
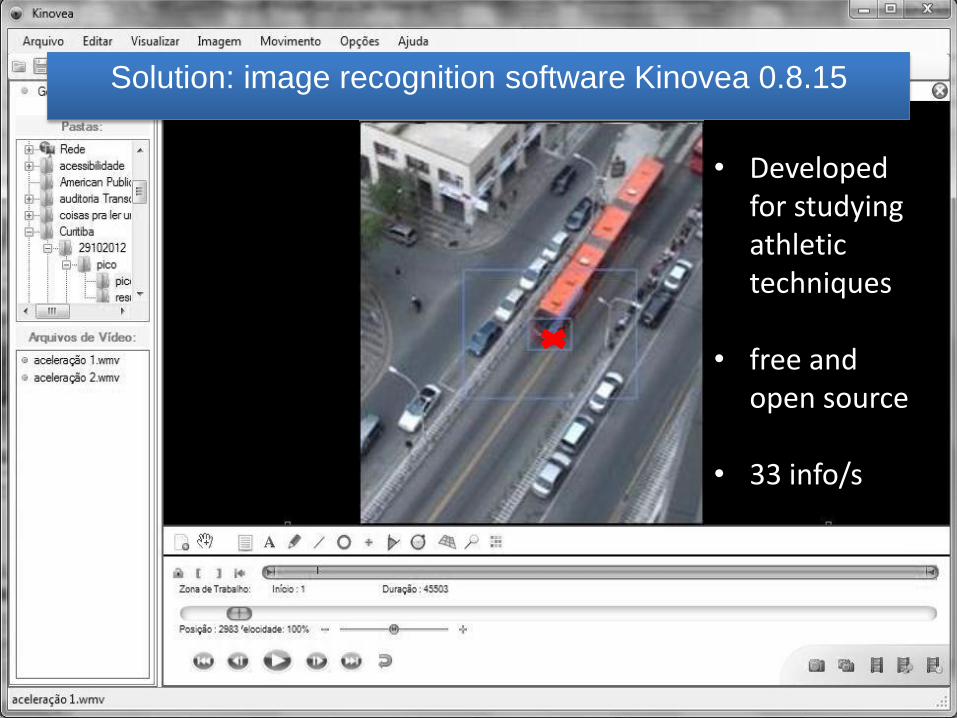
Solution: image recognition software Kinovea 0.8.15
• Developed for studying athletic techniques
• free and open source
• 33 info/s
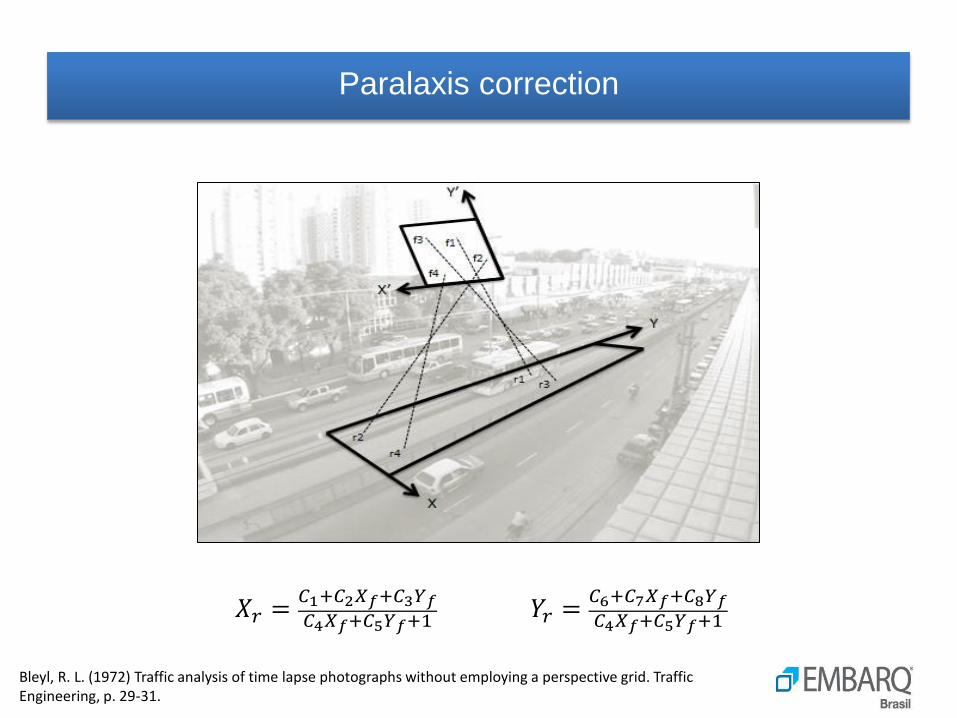
Paralaxis correction
𝑋𝑟 =𝐶1+𝐶2𝑋𝑓+𝐶3𝑌𝑓𝐶4𝑋𝑓+𝐶5𝑌𝑓+1
𝑌𝑟 =𝐶6+𝐶7𝑋𝑓+𝐶8𝑌𝑓𝐶4𝑋𝑓+𝐶5𝑌𝑓+1
Bleyl, R. L. (1972) Traffic analysis of time lapse photographs without employing a perspective grid. Traffic Engineering, p. 29-31.
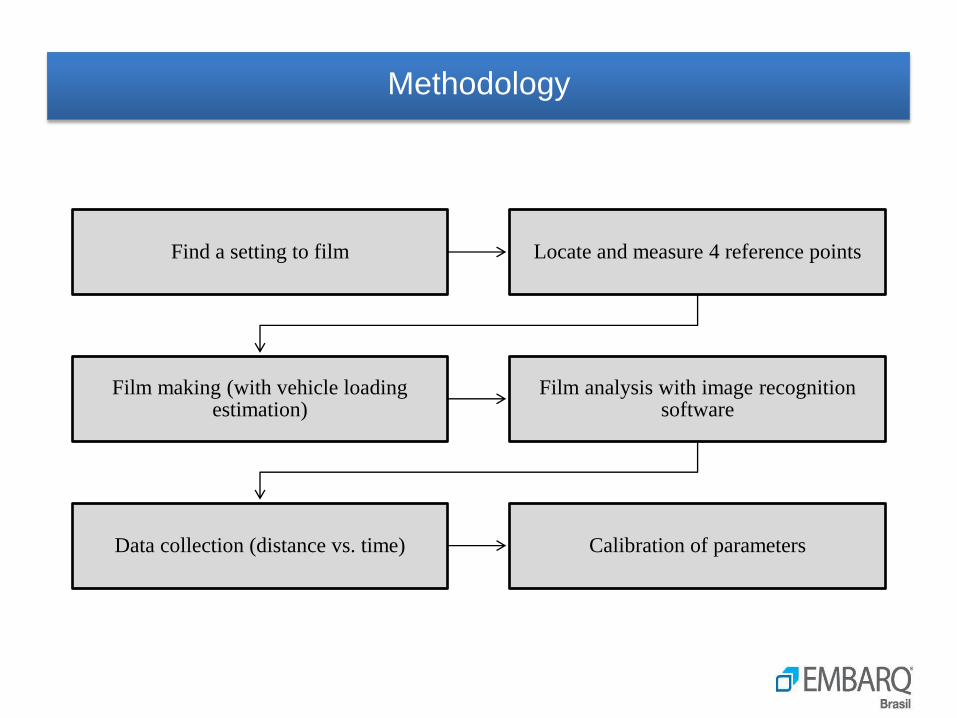
Methodology
Find a setting to film Locate and measure 4 reference points
Film making (with vehicle loading estimation)
Film analysis with image recognition software
Data collection (distance vs. time) Calibration of parameters
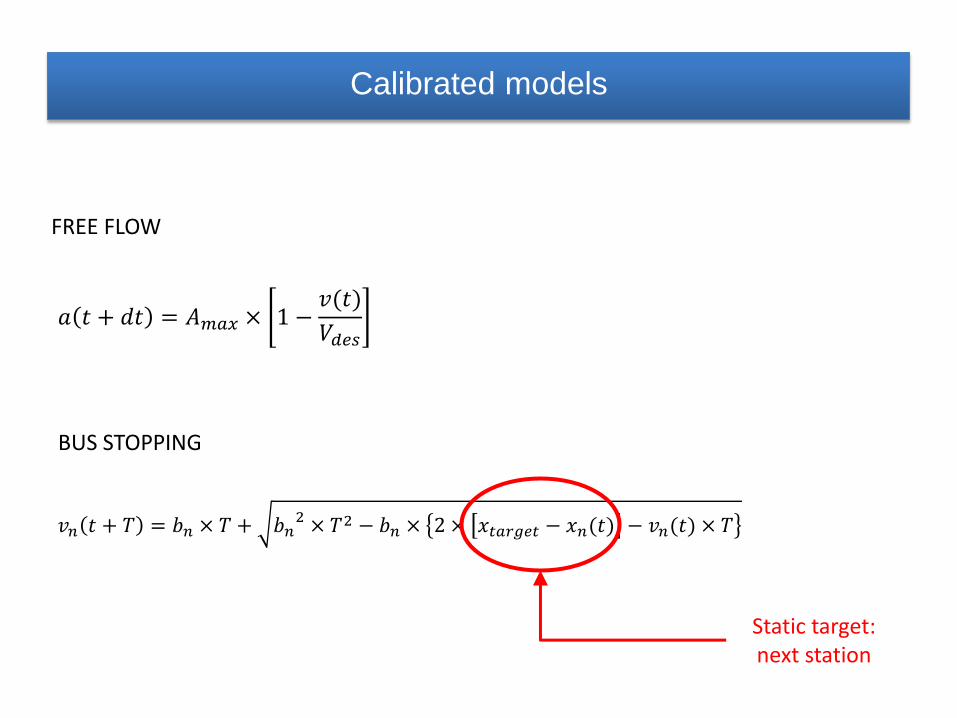
Calibrated models
𝑣𝑛 𝑡 + 𝑇 = 𝑏𝑛 × 𝑇 + 𝑏𝑛2 × 𝑇2 − 𝑏𝑛 × 2 × 𝑥𝑡𝑎𝑟𝑔𝑒𝑡 − 𝑥𝑛(𝑡) − 𝑣𝑛(𝑡) × 𝑇
FREE FLOW
BUS STOPPING
Static target: next station
𝑎 𝑡 + 𝑑𝑡 = 𝐴𝑚𝑎𝑥 × 1 −𝑣(𝑡)
𝑉𝑑𝑒𝑠
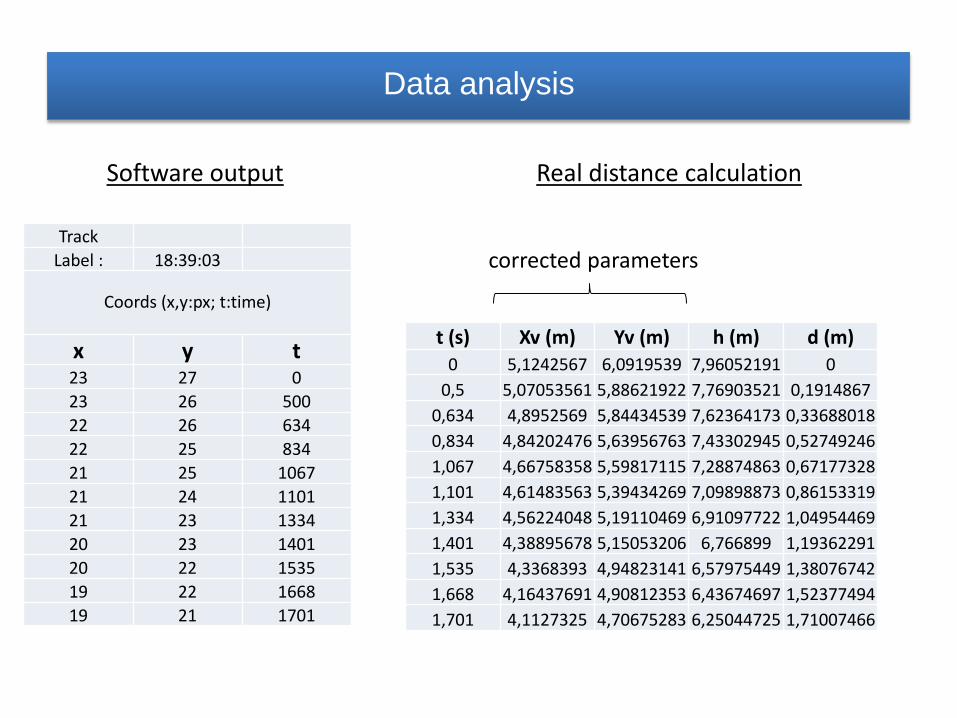
Data analysis
Track
Label : 18:39:03
Coords (x,y:px; t:time)
x y t 23 27 0
23 26 500
22 26 634
22 25 834
21 25 1067
21 24 1101
21 23 1334
20 23 1401
20 22 1535
19 22 1668
19 21 1701
Software output
t (s) Xv (m) Yv (m) h (m) d (m) 0 5,1242567 6,0919539 7,96052191 0
0,5 5,07053561 5,88621922 7,76903521 0,1914867
0,634 4,8952569 5,84434539 7,62364173 0,33688018
0,834 4,84202476 5,63956763 7,43302945 0,52749246
1,067 4,66758358 5,59817115 7,28874863 0,67177328
1,101 4,61483563 5,39434269 7,09898873 0,86153319
1,334 4,56224048 5,19110469 6,91097722 1,04954469
1,401 4,38895678 5,15053206 6,766899 1,19362291
1,535 4,3368393 4,94823141 6,57975449 1,38076742
1,668 4,16437691 4,90812353 6,43674697 1,52377494
1,701 4,1127325 4,70675283 6,25044725 1,71007466
Real distance calculation
corrected parameters
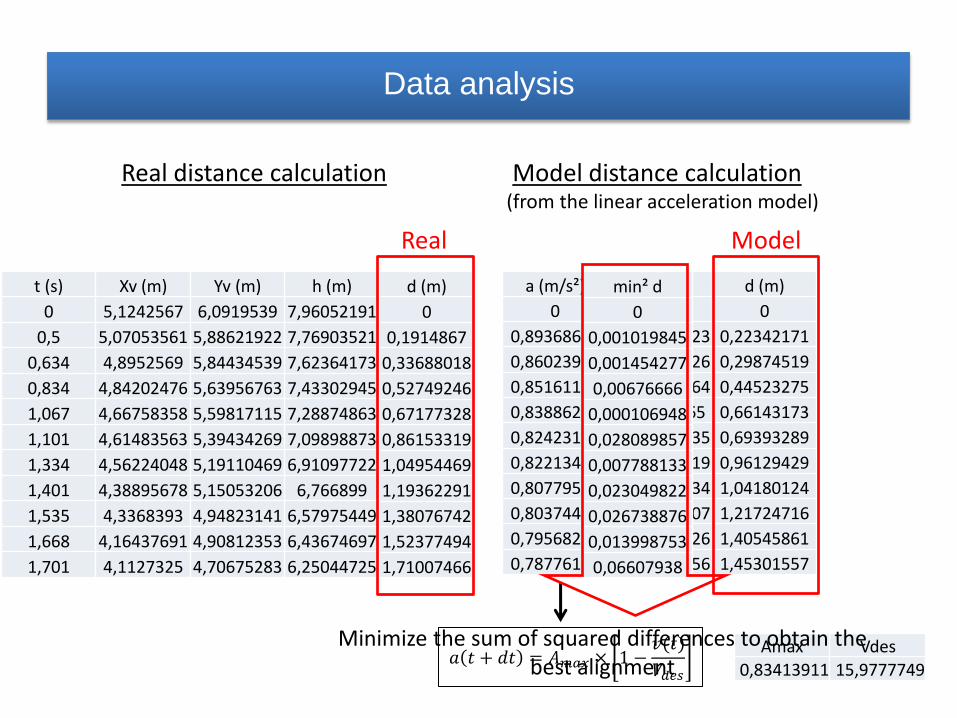
Data analysis
Model distance calculation
t (s) Xv (m) Yv (m) h (m) d (m)
0 5,1242567 6,0919539 7,96052191 0
0,5 5,07053561 5,88621922 7,76903521 0,1914867
0,634 4,8952569 5,84434539 7,62364173 0,33688018
0,834 4,84202476 5,63956763 7,43302945 0,52749246
1,067 4,66758358 5,59817115 7,28874863 0,67177328
1,101 4,61483563 5,39434269 7,09898873 0,86153319
1,334 4,56224048 5,19110469 6,91097722 1,04954469
1,401 4,38895678 5,15053206 6,766899 1,19362291
1,535 4,3368393 4,94823141 6,57975449 1,38076742
1,668 4,16437691 4,90812353 6,43674697 1,52377494
1,701 4,1127325 4,70675283 6,25044725 1,71007466
a (m/s²) v (m/s) d (m)
0 0 0
0,89368685 0,446843423 0,22342171
0,86023957 0,562115526 0,29874519
0,85161119 0,732437764 0,44523275
0,83886217 0,92789265 0,66143173
0,82423192 0,955916535 0,69393289
0,82213426 1,147473819 0,96129429
0,80779575 1,201596134 1,04180124
0,80374457 1,309297907 1,21724716
0,79568284 1,415123726 1,40545861
0,78776154 1,441119856 1,45301557
𝑎 𝑡 + 𝑑𝑡 = 𝐴𝑚𝑎𝑥 × 1 −𝑣(𝑡)
𝑉𝑑𝑒𝑠
Amax Vdes
0,83413911 15,9777749
Real distance calculation (from the linear acceleration model)
d (m)
0
0,22342171
0,29874519
0,44523275
0,66143173
0,69393289
0,96129429
1,04180124
1,21724716
1,40545861
1,45301557
d (m)
0
0,1914867
0,33688018
0,52749246
0,67177328
0,86153319
1,04954469
1,19362291
1,38076742
1,52377494
1,71007466
Real Model
min² d
0
0,001019845
0,001454277
0,00676666
0,000106948
0,028089857
0,007788133
0,023049822
0,026738876
0,013998753
0,06607938
Minimize the sum of squared differences to obtain the best alignment
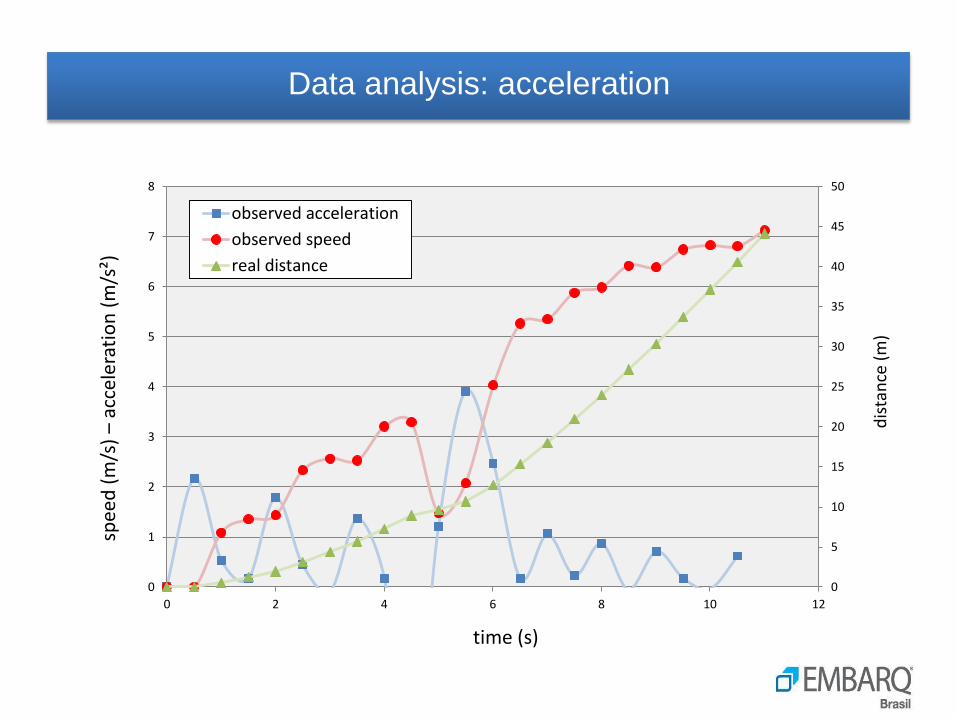
Data analysis: acceleration
0
5
10
15
20
25
30
35
40
45
50
0
1
2
3
4
5
6
7
8
0 2 4 6 8 10 12
dis
tan
ce (
m)
spee
d (
m/s
) –
acce
lera
tio
n (
m/s
²)
time (s)
observed acceleration
observed speed
real distance
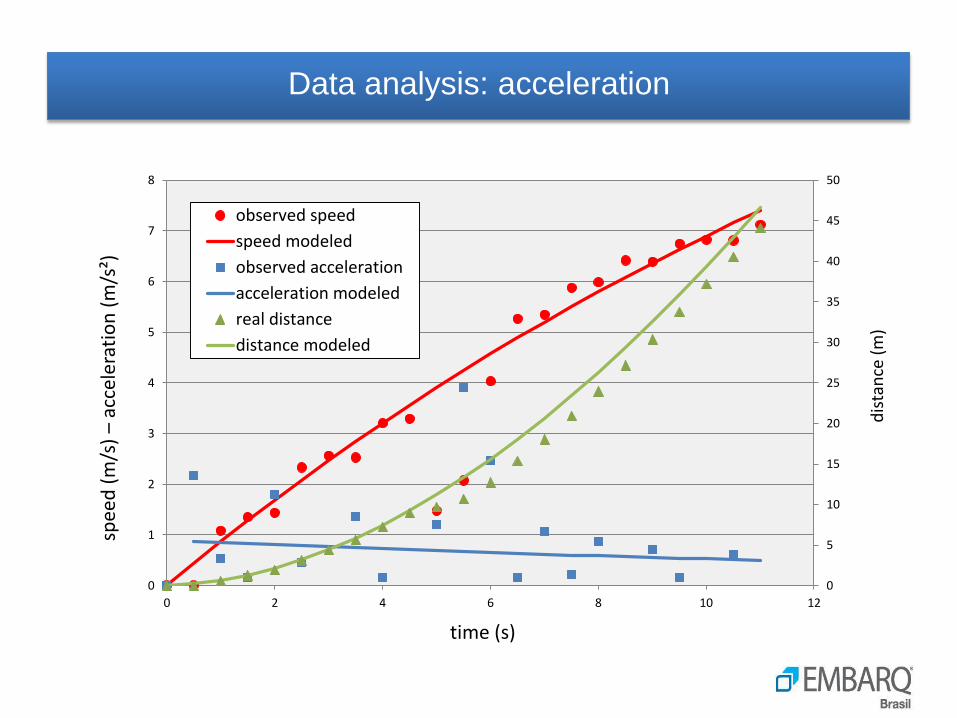
Data analysis: acceleration
0
5
10
15
20
25
30
35
40
45
50
0
1
2
3
4
5
6
7
8
0 2 4 6 8 10 12
dis
tan
ce (
m)
spee
d (
m/s
) –
acce
lera
tio
n (
m/s
²)
time (s)
observed speed
speed modeled
observed acceleration
acceleration modeled
real distance
distance modeled

Acceleration by occupancy level
0,00
0,20
0,40
0,60
0,80
1,00
1,20
1,40
1,60
0 1 2 3 4 5 6
acce
lera
tio
n (
m/s
²)
bus load levels
level 1
level 2
level 3
level 4
level 5
average
Level 1 Level 2 Level 3 Level 4 Level 5
Acceleration (m/s²)
1,07 (0,11)
0,94 (0,16)
0,92 (0,09)
0,81 (0,17)
0,80 (0,14)
Time to reach 60km/h (s)
33 (7,49)
35 (7,00)
34 (3,60)
40 (7,74)
49 (16,74)
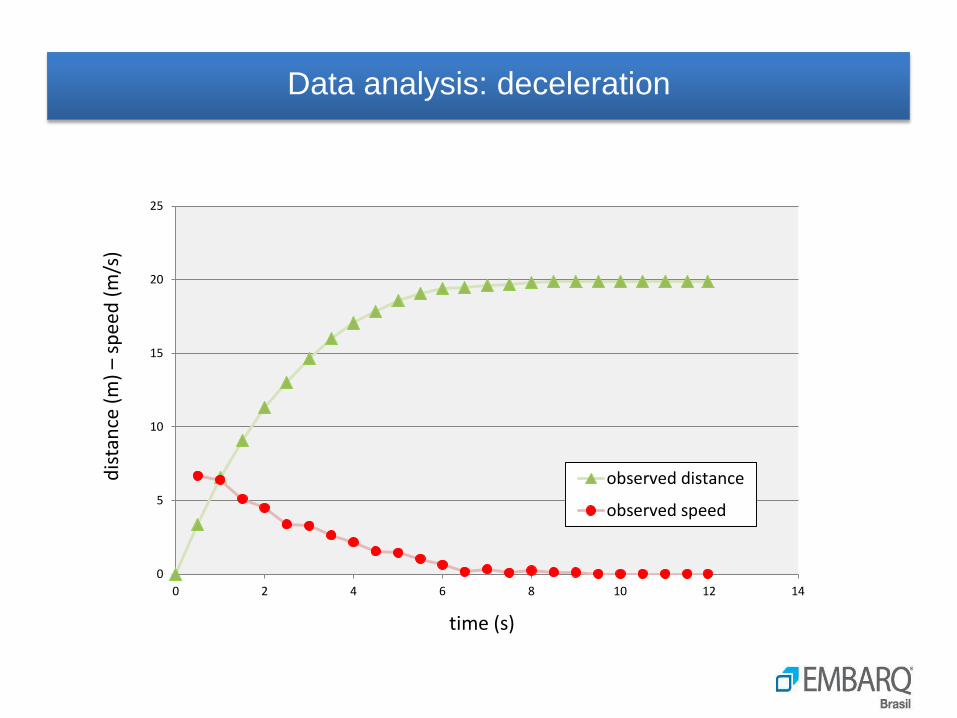
Data analysis: deceleration
0
5
10
15
20
25
0 2 4 6 8 10 12 14
dis
tan
ce (
m) –
spee
d (
m/s
)
time (s)
observed distance
observed speed
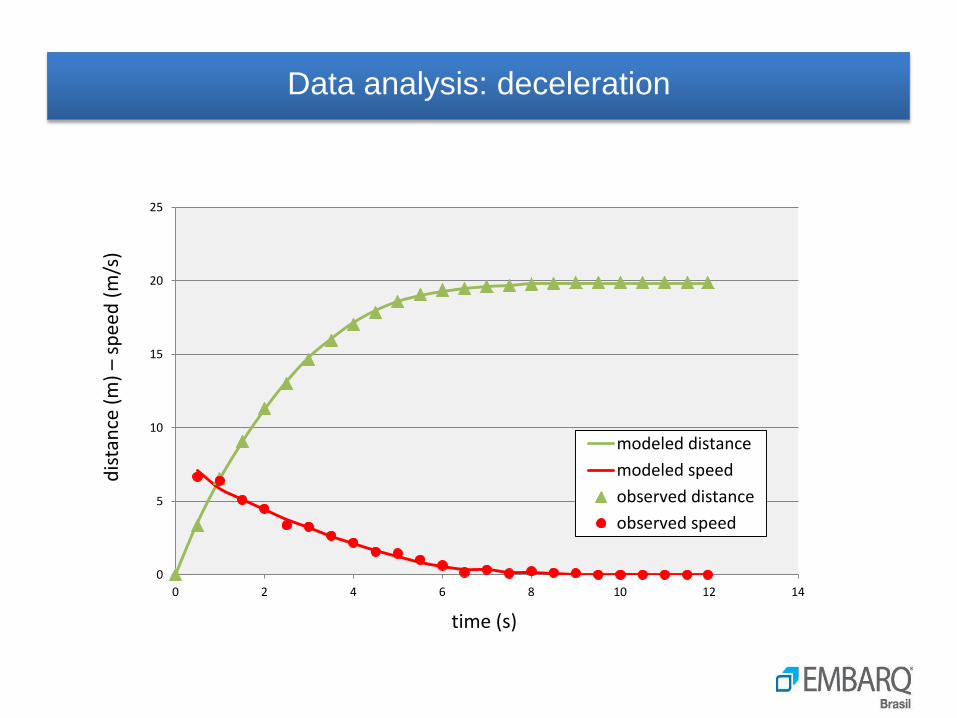
Data analysis: deceleration
0
5
10
15
20
25
0 2 4 6 8 10 12 14
dis
tan
ce (
m) –
spee
d (
m/s
)
time (s)
modeled distance
modeled speed
observed distance
observed speed
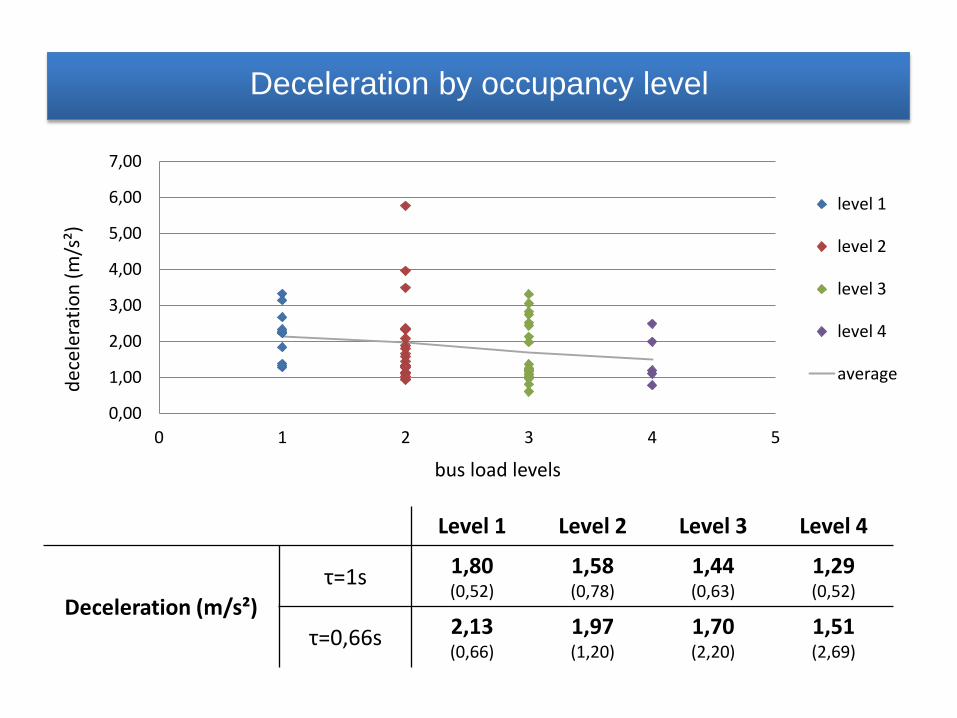
Deceleration by occupancy level
Level 1 Level 2 Level 3 Level 4
Deceleration (m/s²)
τ=1s 1,80 (0,52)
1,58 (0,78)
1,44 (0,63)
1,29 (0,52)
τ=0,66s 2,13 (0,66)
1,97 (1,20)
1,70 (2,20)
1,51 (2,69)
0,00
1,00
2,00
3,00
4,00
5,00
6,00
7,00
0 1 2 3 4 5
dec
eler
atio
n (
m/s
²)
bus load levels
level 1
level 2
level 3
level 4
average