linear system with random process input lti system with … · · 2014-11-18• process linear...
TRANSCRIPT

Lecture Notes 8
Random Processes in Linear Systems
• Linear System with Random process Input
• LTI System with WSS Process Input
• Process Linear Estimation
◦ Infinite smoothing filter
◦ Spectral Factorization
◦ Wiener Filter
EE 278B: Random Processes in Linear Systems 8 – 1
Linear System with Random Process Input
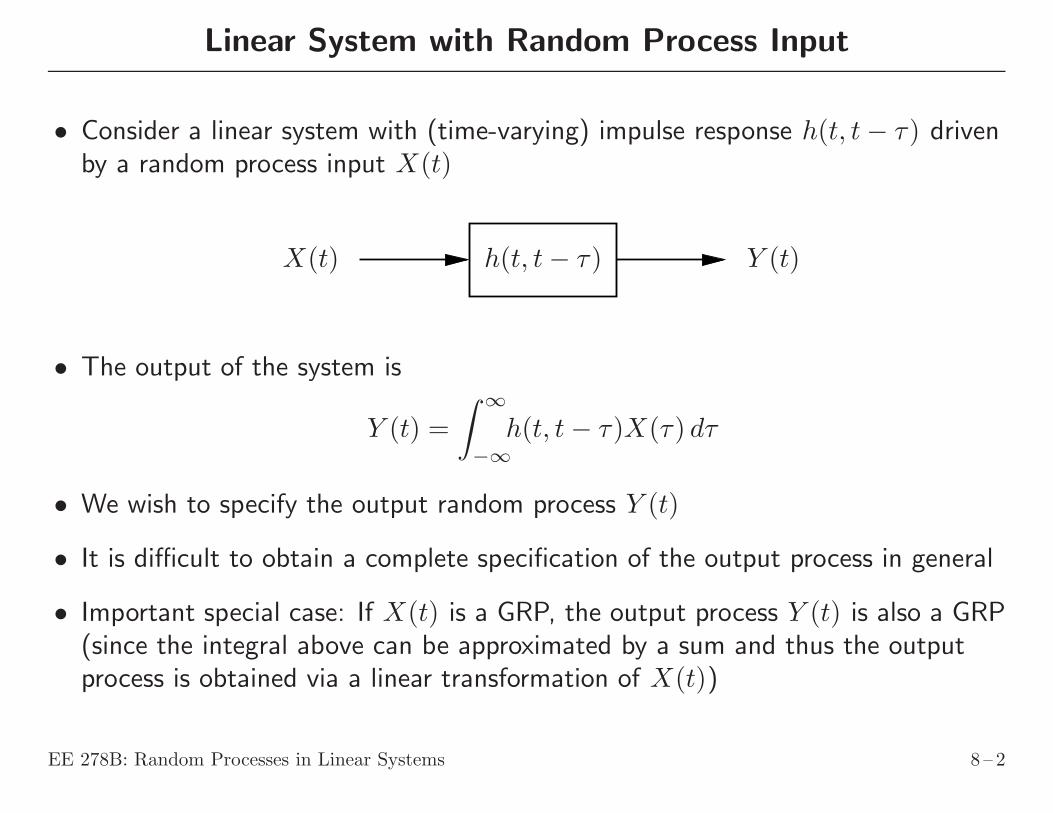
• Consider a linear system with (time-varying) impulse response h(t, t− τ) drivenby a random process input X(t)
PSfrag
X(t) Y (t)h(t, t− τ)
• The output of the system is
Y (t) =
∫ ∞
−∞
h(t, t− τ)X(τ) dτ
• We wish to specify the output random process Y (t)
• It is difficult to obtain a complete specification of the output process in general
• Important special case: If X(t) is a GRP, the output process Y (t) is also a GRP(since the integral above can be approximated by a sum and thus the outputprocess is obtained via a linear transformation of X(t))
EE 278B: Random Processes in Linear Systems 8 – 2

• We focus on finding the mean and autocorrelation functions of Y (t) in terms ofthe mean and autocorrelation functions of the input process X(t) and theimpulse response of the system h(t, t− τ)
We are also interested in finding the crosscorrelation function between X(t) andY (t) defined as
RXY (t1, t2) = E(X(t1)Y (t2))
Note that unlike RX(t1, t2), RXY (t1, t2) is not necessarily symmetric in t1 andt2. However, RXY (t1, t2) = RY X(t2, t1)
• To find the mean of Y (t), consider
E(Y (t)) = E
(∫ ∞
−∞
h(t, t− τ)X(τ) dτ
)
=
∫ ∞
−∞
h(t, t− τ) E(X(τ)) dτ
• The crosscorrelation function between Y (t) and X(t) is
RY X(t1, t2) = E(Y (t1)X(t2))
= E
(∫ ∞
−∞
h(t1, t1 − τ)X(τ)X(t2) dτ
)
=
∫ ∞
−∞
h(t1, t1 − τ)RX(τ, t2) dτ
EE 278B: Random Processes in Linear Systems 8 – 3

• The autocorrelation function of Y (t) is
RY (t1, t2) = E(Y (t1)Y (t2))
= E
(∫ ∞
−∞
h(t2, t2 − τ)X(τ)Y (t1) dτ
)
=
∫ ∞
−∞
h(t2, t2 − τ)RY X(t1, τ) dτ
=
∫ ∞
−∞
∫ ∞
−∞
h(t2, t2 − τ2)h(t1, t1 − τ1)RX(τ1, τ2) dτ1 dτ2
The average power isE(Y 2(t)) = RY (t, t)
• Example (Integrator): Let X(t) be a white noise process with autocorrelationfunction RX(τ) = (N/2)δ(τ) and let the linear system be an ideal integrator,i.e.,
Y (t) =
∫ t
0
X(τ) dτ
Find the mean and autocorrelation functions and the average power of theintegrator output Y (t), for t > 0
EE 278B: Random Processes in Linear Systems 8 – 4

This example is motivated by several applications:
◦ Noise in an image sensor pixel: the white noise models the photodetector shotnoise, which is integrated with the signal over a capacitor before sampling
◦ Noise in a voltage controlled oscillator (for phase locked loops)
• Solution: The mean is
E(Y (t)) =
∫ t
0
E(X(τ)) dτ = 0
To obtain the autocorrelation function and average power for this case, we canspecialize the previous results to
RY X(t1, t2) =
∫ t1
0
N
2δ(t2 − τ) dτ
=
N
2, for t2 ≤ t1
0, otherwise
EE 278B: Random Processes in Linear Systems 8 – 5
RY (t1, t2) =
N
2t2, for t2 ≤ t1
N
2t1 otherwise
=N
2min{t1, t2}
E(Y 2(t)) = RY (t, t) =N
2t
Note that the average power grows linearly with t (as for the random walk)
• If in addition X(t) is a GRP, then Y (t) is also a GRP and is referred to as theWiener process
EE 278B: Random Processes in Linear Systems 8 – 6

LTI System with WSS Process Input
• Consider a linear time invariant (LTI) system with real impulse response h(t) andtransfer function H(f) = F(h(t)), driven by WSS process X(t), −∞ < t < ∞
PSfrag
X(t) Y (t)h(t)
• We want to characterize its output Y (t) = X(t) ∗ h(t) =∫ ∞
−∞
X(τ)h(t− τ)dτ
• It turns out (not surprisingly) that if the system is stable, i.e.,∣
∣
∣
∫∞
−∞h(t) dt
∣
∣
∣= |H(0)| < ∞, then X(t) and Y (t) are jointly WSS, which
means that:
◦ X(t) and Y (t) are WSS, and
◦ Their crosscorrelation function RXY (t1, t2) is time invariant, i.e.,
RXY (t1, t2) = E(X(t1)Y (t2)) = RXY (t1 + τ, t2 + τ) for all τ
EE 278B: Random Processes in Linear Systems 8 – 7

• Relabel RXY (t1, t2) for jointly WSS X(t), Y (t) as RXY (τ), where τ = t1 − t2
RXY (τ) = RXY (t2 + τ, t2) = RXY (t2 + (t1 − t2), t2) = RXY (t1, t2)
Again RXY (τ) is not necessarily even. However,
RXY (τ) = RY X(−τ)
• Example: Let Θ ∼ U[0, 2π]. Consider two processes
X(t) = α cos(ωt+Θ) and Y (t) = α sin(ωt+Θ)
These processes are jointly WSS, since each is WSS (in fact SSS) and
RXY (t1, t2) = E[
α2 cos(ωt1 +Θ) sin(ωt2 +Θ)]
=α2
4π
∫ 2π
0
[
sin(ω(t1 + t2) + 2θ)− sin(ω(t1 − t2))]
dθ
= −α2
2sin(ω(t1 − t2))
• We define the cross power spectral density for jointly WSS processes X(t), Y (t)as
SXY (f) = F(RXY (τ))
EE 278B: Random Processes in Linear Systems 8 – 8

• Example: Let Y (t) = X(t) + Z(t), where X(t) and Z(t) are zero meanuncorrelated WSS processes. Show that Y (t) and X(t) are jointly WSS, andfind RXY (τ) (in terms of RX and RZ) and SXY (f) (in terms of SX and SZ)
Solution: First, we show that Y (t) is WSS, since it is zero mean and
RY (t1, t2) = E[
(X(t1) + Z(t1))(X(t2) + Z(t2))]
= E(
X(t1)X(t2))
+ E(
Z(t1)Z(t2))
(X(t), Z(t) zero mean, uncorrelated)
= RX(τ) +RZ(τ)
Taking the Fourier transform of both sides, SY (f) = SX(f) + SZ(f)
To show that Y (t) and X(t) are jointly WSS, we need to show that theircrosscorrelation function is time invariant
RXY (t1, t2) = E[
X(t1)(X(t2) + Z(t2))]
= E(
X(t1)X(t2))
+ E(
X(t1)Z(t2))
= RX(t1, t2) + 0 (X(t), Z(t) zero mean, uncorrelated)
= RX(τ)
Taking the Fourier transform, SXY (f) = SX(f)
EE 278B: Random Processes in Linear Systems 8 – 9

Output Mean, Autocorrelation, and PSD
Theorem: Let X(t), t ∈ R, be a WSS process input to a stable LTI system withreal impulse response h(t) and transfer function H(f). Then the input X(t) andoutput Y (t) are jointly WSS with:
1. E(Y (t)) = H(0) E(X(t))
2. RY X(τ) = h(τ) ∗RX(τ)
3. RY (τ) = h(τ) ∗RX(τ) ∗ h(−τ)
RX(τ) RY (τ)h(τ) h(−τ)RY X(τ)
4. SY X(f) = H(f)SX(f)
5. SY (f) = |H(f)|2SX(f)
SX(f) SY (f)H(f) H(−f)SY X(f)
EE 278B: Random Processes in Linear Systems 8 – 10

Remark: For a discrete time WSS process X(n) and a stable LTI system h(n),X(n) and the output process Y (n) are jointly WSS and we can similarly findRY (n), . . .
Proof: Note that here the LTI system is in steady state
1. To find the mean of Y (t), consider
E(Y (t)) = E
(∫ ∞
−∞
X(τ)h(t− τ) dτ
)
=
∫ ∞
−∞
E(X(τ))h(t− τ) dτ
= E(X(t))
∫ ∞
−∞
h(t− τ) dτ = E(X(t))H(0)
2. To find the crosscorrelation function between Y (t) and X(t), consider
RY X(τ) = E(
Y (t+ τ)X(t))
= E
(∫ ∞
−∞
h(α)X(t+ τ − α)X(t) dα
)
EE 278B: Random Processes in Linear Systems 8 – 11
=
∫ ∞
−∞
h(α)RX(τ − α) dα
= h(τ) ∗RX(τ)
3. To find the autocorrelation function of Y (t), consider
RY (τ) = E(Y (t+ τ)Y (t))
= E
(
Y (t+ τ)
∫ ∞
−∞
h(α)X(t− α) dα
)
=
∫ ∞
−∞
h(α)RY X(τ + α) dα
= RY X(τ) ∗ h(−τ)
4. Follows by taking the Fourier transform of RY X(τ)
5. Follows by taking the Fourier transform of RY (τ)
EE 278B: Random Processes in Linear Systems 8 – 12
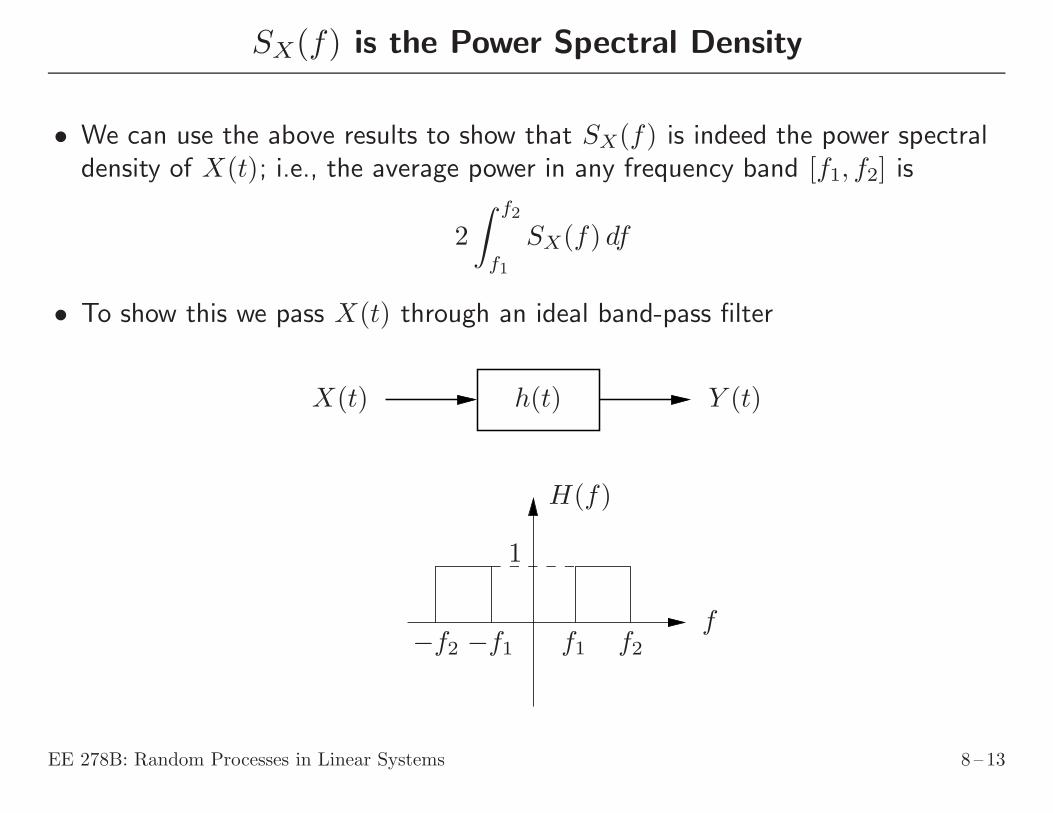
SX(f) is the Power Spectral Density
• We can use the above results to show that SX(f) is indeed the power spectraldensity of X(t); i.e., the average power in any frequency band [f1, f2] is
2
∫ f2
f1
SX(f) df
• To show this we pass X(t) through an ideal band-pass filter
X(t) Y (t)h(t)
H(f)
1
f−f2 −f1 f1 f2
EE 278B: Random Processes in Linear Systems 8 – 13
• Now the average power of X(t) in the band [f1, f2] is
E(Y 2(t)) =
∫ ∞
−∞
SY (f) df
=
∫ ∞
−∞
|H(f)|2SX(f) df
=
∫ −f1
−f2
SX(f) df +
∫ f2
f1
SX(f) df
= 2
∫ f2
f1
SX(f) df
• This also shows that SX(f) ≥ 0 for all f
EE 278B: Random Processes in Linear Systems 8 – 14
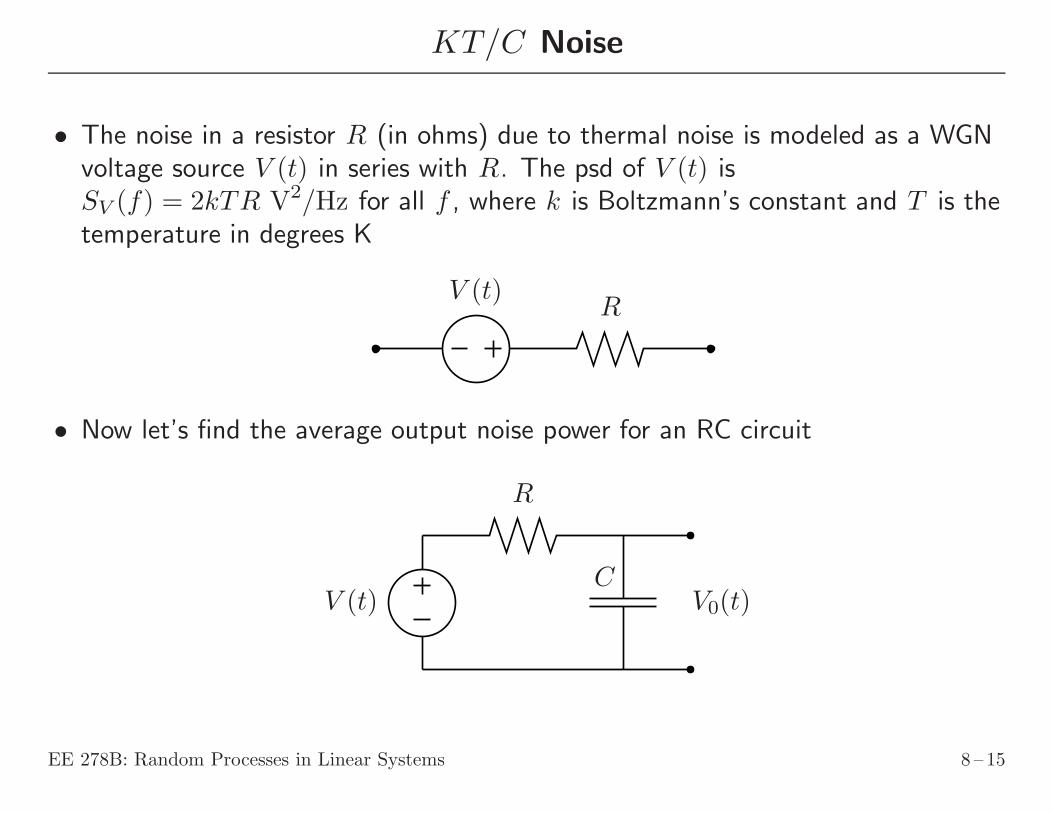
KT/C Noise
• The noise in a resistor R (in ohms) due to thermal noise is modeled as a WGNvoltage source V (t) in series with R. The psd of V (t) isSV (f) = 2kTR V2/Hz for all f , where k is Boltzmann’s constant and T is thetemperature in degrees K
V (t)R
• Now let’s find the average output noise power for an RC circuit
R
CV (t) V0(t)
EE 278B: Random Processes in Linear Systems 8 – 15

• First we find the transfer function for the circuit
H(f) =1
1 + i2πfRC⇒ |H(f)|2 = 1
1 + (2πfRC)2
• Now we write the output psd in terms of the input psd as
SVo = SV (f)|H(f)|2 = 2kTR1
1 + (2πfRC)2, −∞ < f < ∞
• Thus the average output power is
E(V 2o (t)) =
∫ ∞
−∞
SVo(f)df
=2kTR
2πRC
∫ ∞
−∞
1
1 + (2πfRC)2d(2πfRC)
=kT
πC
∫ ∞
−∞
1
1 + x2dx
=kT
πCarctanx
∣
∣
∣
∣
+∞
−∞
=kT
πCπ =
kT
C,
which is independent of R!
EE 278B: Random Processes in Linear Systems 8 – 16

Autoregressive Moving Average Process
• Let Xn, −∞ < n < ∞, be a discrete time white noise process with averagepower N
The autoregressive moving average (ARMA) process of order (p, q), Yn,−∞ < n < ∞, is defined as
Yn = −p
∑
k=1
αkYn−k +
q∑
l=0
βlXn−l
where β0 = 1, α1, . . . , αp and β1, . . . , βq are fixed parameters
• This process can be viewed as the output of an LTI system with transfer function
H(f) =1 +
∑ql=1 βle
−i2πfl
1 +∑p
k=1αke−i2πfk, |f | < 1
2
Therefore, the PSD of Yn is SY (f) = |H(f)|2N for |f | < 1/2
EE 278B: Random Processes in Linear Systems 8 – 17

• Moving average (MA) process of order q: Let α1 = · · · = αp = 0, then Yn issimply a weighted sum of the q + 1 most recent Xn samples with weights(1, β1, . . . , βq), i.e.,
Yn =
q∑
l=0
βlXn−l, and the transfer function of the LTI system is
H(f) = 1 +
q∑
l=1
βle−i2πfl, |f | < 1
2
• Communication channel with intersymbol interference: The Xn processrepresents the transmitted information symbols and 1, β1, . . . , βq are thecoefficients of the channel impulse response
The process Yn is the interference-impaired received symbols
• Autoregressive (AR) process of order p: Let β1 = · · · = βn = 0. Then
Yn = −p
∑
k=1
αkYn−k +Xn, and the transfer function of the LTI system is
H(f) =1
1 +∑p
k=1αke−i2πfk, |f | < 1
2
EE 278B: Random Processes in Linear Systems 8 – 18
• Modeling the human speech generation process: The process Xn is generatedby the vocal cords. The vocal tract is modeled as a series of coupled losslessacoustic tubes parameterized by (α1, . . . , αp)
The process Yn is the uttered speech signal after it passes through the vocaltract
• For p = 1, we obtain the first-order autoregressive process
Yn = −α1Yn−1 +Xn,
H(f) =1
1 + α1e−i2πf, |f | < 1
2
h(n) = (−α1)n u(n)
This transfer function is stable iff∑∞
n=−∞ |h(n)| < ∞, i.e., iff |α1| < 1
If Xn is Gaussian, we obtain a stationary version of the Gauss–Markov processdiscussed in Lecture Notes 6 with α = −α1
EE 278B: Random Processes in Linear Systems 8 – 19

Sampling Theorem for Bandlimited WSS Processes
• Recall the Nyquist sampling theorem for bandlimited deterministic signals:
◦ Let x(t) be a signal with Fourier transform X(f) such that X(f) = 0 forf /∈ [−B,B]
◦ We sample the signal at rate 1/T to obtain the sampled signal
yn = x(nT ) for n = . . . ,−2,−1, 0, 1, 2, . . .
The Fourier transform of the sequence yn,
Y (f) =∞∑
n=−∞
X(f − n/T ),
is periodic with period 1/T
◦ To recover the signal, we pass yn through an ideal low pass filter ofbandwidth 1/T . The Fourier transform of the reconstructed signal is
X(f) = Y (f) · ⊓(fT )
◦ Hence if the sampling rate 1/T ≥ 2B , X(f) = X(f) and the signal can bereconstructed perfectly from its samples
EE 278B: Random Processes in Linear Systems 8 – 20

• It turns out that a similar result holds for sampling of bandlimited WSS randomprocesses
• Sampling theorem for WSS processes:
◦ Let X(t) be a continuous time WSS process with zero mean andautocorrelation function RX(τ) and PSD SX(f) = 0 for f /∈ [−B,B]
◦ We sample X(t) at rate 1/T to obtain the sampled (discrete time) processYn = X(nT ) with
µY (n) = E(Yn) = E(X(nT )) = 0,
RY (n1, n2) = E(Yn1Yn2) = E(X(n1T )X(n2T )) = RX((n1 − n2)T )
Hence Yn is WSS with zero mean and autocorrelation function
RY (n) = RX(nT )
The PSD of Yn,
SY (f) =∞∑
n=−∞
SX(f − n/T ),
is periodic with period 1/T
EE 278B: Random Processes in Linear Systems 8 – 21
◦ As for the deterministic signal case, to reconstruct the RP X(t), we pass Yn
through an ideal low pass filter
The resulting reconstruction process X(t) is WSS with PSD
SX(f) = SY (f)| ⊓ (fT )|2
◦ Hence if the sampling rate 1/T ≥ 2B , SX(f) = SX(f)
◦ We show that this implies that the reconstruction process X(t) = X(t) forevery t with probability one. Consider
E[
(X(t)− X(t))2]
= 0 for every t
◦ Proof: We know that if 1/T ≥ 2B , SX(f) = SX(f), which implies thatRX(τ) = RX(τ)
Moreover,
RXX(τ) = sinc( τ
T
)
∗RX(τ)
Now, consider
E[
(X(t)− X(t))2]
= RX(0) +RX(0)− 2RXX(0) = 2RX(0)− 2RX(0) = 0
Hence, X(t) = X(t) w.p.1 for every t
EE 278B: Random Processes in Linear Systems 8 – 22

Process Linear Estimation
• Let X(t) and Y (t) be zero mean jointly WSS processes with knownautocorrelation and crosscorrelation functions RX(τ), RY (τ), and RXY (τ)
• We observe the random process Y (α) for t− a ≤ α ≤ t+ b (−a ≤ b) and wishto find the MMSE linear estimate of the signal X(t), i.e., X(t) such that theMSE = E
[
(X(t)− X(t))2]
is minimized
• The linear estimate is of the form
X(t) =
∫ a
−b
h(τ)Y (t− τ) dτ
• By the orthogonality principle, the MMSE linear estimate must satisfy(
X(t)− X(t))
⊥ Y (t− τ) , −b ≤ τ ≤ a
orE[
(X(t)− X(t))Y (t− τ)]
= 0 , −b ≤ τ ≤ a
EE 278B: Random Processes in Linear Systems 8 – 23

Thus, for −b ≤ τ ≤ a, we must have
RXY (τ) = E[
X(t)Y (t− τ)]
= E[
X(t)Y (t− τ)]
= E
(∫ a
−b
h(α)Y (t− α)Y (t− τ) dα
)
=
∫ a
−b
h(α)RY (τ − α) dα
So, to find h(α) we need to solve an infinite set of integral equations
• Solving these equations analytically is not possible in general. However, it canbe done for two important special cases:
◦ Infinite smoothing : when a, b → ∞◦ Filtering : when a → ∞ and b = 0 (Wiener–Hopf equations)
EE 278B: Random Processes in Linear Systems 8 – 24

Infinite Smoothing Filter
• When a, b → ∞, the integral equations for the MMSE linear estimate become
RXY (τ) =
∫ ∞
−∞
h(α)RY (τ − α) dα , −∞ < τ < +∞
In other words,RXY (τ) = h(τ) ∗RY (τ)
• The Fourier transform convolution theorem gives the transfer function for theoptimal infinite smoothing filter :
SXY (f) = H(f)SY (f) ⇒ H(f) =SXY (f)
SY (f)
EE 278B: Random Processes in Linear Systems 8 – 25

• The minimum MSE is
MSE = E[
(X(t)− X(t))2]
= E[
(X(t)− X(t))X(t)]
− E[
(X(t)− X(t))X(t)]
= E[
(X(t)− X(t))X(t)]
(by orthogonality)
= E[
(X(t)2]
− E[
X(t)X(t)]
To evaluate the second term, consider
RXX(τ) = E(X(t+ τ)X(t))
= E(
X(t+ τ)
∫ ∞
−∞
h(α)Y (t− α) dα)
=
∫ ∞
−∞
h(α)RXY (τ + α) dα = RXY (τ) ∗ h(−τ)
Therefore
E(X(t)X(t)) = RXX(0) =
∫ ∞
−∞
H(−f)SXY (f) df =
∫ ∞
−∞
|SXY (f)|2SY (f)
df ,
EE 278B: Random Processes in Linear Systems 8 – 26

and the minimum MSE is
E[
(X(t)− X(t))2]
= E[
(X(t)2]
− E(
X(t)X(t))
=
∫ ∞
−∞
SX(f) df −∫ ∞
−∞
|SXY (f)|2SY (f)
df
=
∫ ∞
−∞
(
SX(f)− |SXY (f)|2SY (f)
)
df
• Example (Additive White Noise Channel): Let X(t) and Z(t) be zero meanuncorrelated WSS processes with
SX(f) =
{
P2 |f | ≤ B
0 otherwise
SZ(f) =N
2for all f
Here the signal X is bandlimited white noise, and Z is white noise
Find the optimal infinite smoothing filter for estimating X(t) given
Y (τ) = X(τ) + Z(τ) , −∞ < τ < +∞and the MSE for the estimate produced by this filter
EE 278B: Random Processes in Linear Systems 8 – 27

The power spectral densities of X and Z are shown below
SX(f)
SZ(f)
H(f)
P2
N2
PP+N
f
f
f
−B
−B
B
B
EE 278B: Random Processes in Linear Systems 8 – 28
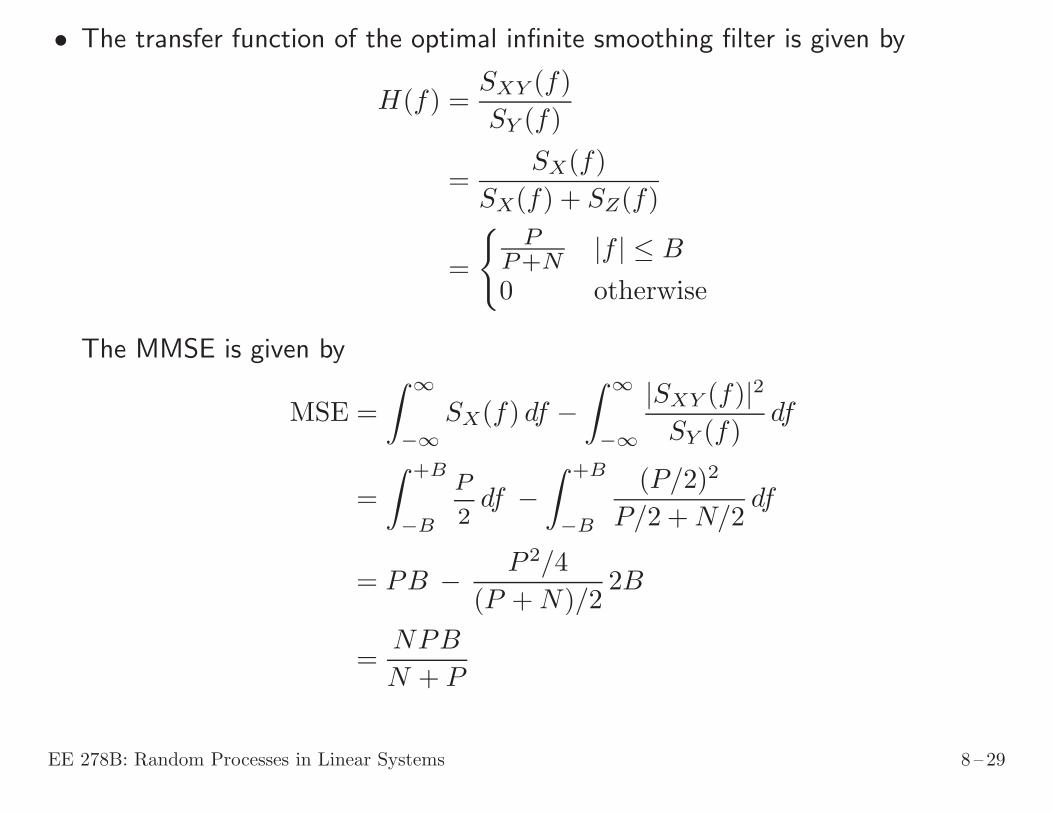
• The transfer function of the optimal infinite smoothing filter is given by
H(f) =SXY (f)
SY (f)
=SX(f)
SX(f) + SZ(f)
=
{
PP+N |f | ≤ B
0 otherwise
The MMSE is given by
MSE =
∫ ∞
−∞
SX(f) df −∫ ∞
−∞
|SXY (f)|2SY (f)
df
=
∫ +B
−B
P
2df −
∫ +B
−B
(P/2)2
P/2 +N/2df
= PB − P 2/4
(P +N)/22B
=NPB
N + P
EE 278B: Random Processes in Linear Systems 8 – 29

Spectral Factorization
• It can be shown that the power spectral density SX(f) of WSS process X(t)has a square root, i.e., a transfer function H(f) such that
SX(f) = H(f)H∗(f) = |H(f)|2
This is similar to the square root of a covariance (correlation) matrix for arandom vector discussed in Lecture notes 4
• As for the random vector case, the square root of a PSD, H(f), and its inverse1/H(f) can be used for coloring and whitening of WSS processes, e.g.,
◦ Coloring:
X(t) H(f) Y (t)
SX(f) = 1 SY (f) = S(f)
EE 278B: Random Processes in Linear Systems 8 – 30

◦ Whitening:
Y (t) 1/H(f) X(t)
SX(f) = 1SY (f) = S(f)
Here X(t) is the innovation process of Y (t)
• It turns out that under certain conditions, the PSD S(f) of a WSS process hasa causal square root, that is, S+(f) such that S(f) = S+(f)S−(f), whereS−(f) = (S+(f))∗ is an anticausal filter (note the similarity to the square rootfor correlation matrix via Cholesky decomposition)
• In particular, if S(f) is a rational PSD for a continuous time WSS process, i.e.,
S(f) = c(2πif + a1)(2πif + a2) . . . (2πif + am)
(2πif + b1)(2πif + b2) . . . (2πif + bn),
then it can be factorized into product of causal and anticausal square roots
Proof: Since S(f) is real and nonnegative, S∗(f) = S(f), if the denominatorhas factor (2πif + b), Re(b) > 0, then it must have factor (−2πif + b∗).Similarly, if numerator has factor (2πif + a), Re(a) > 0, then it must havefactor (−2πif + a∗)
EE 278B: Random Processes in Linear Systems 8 – 31
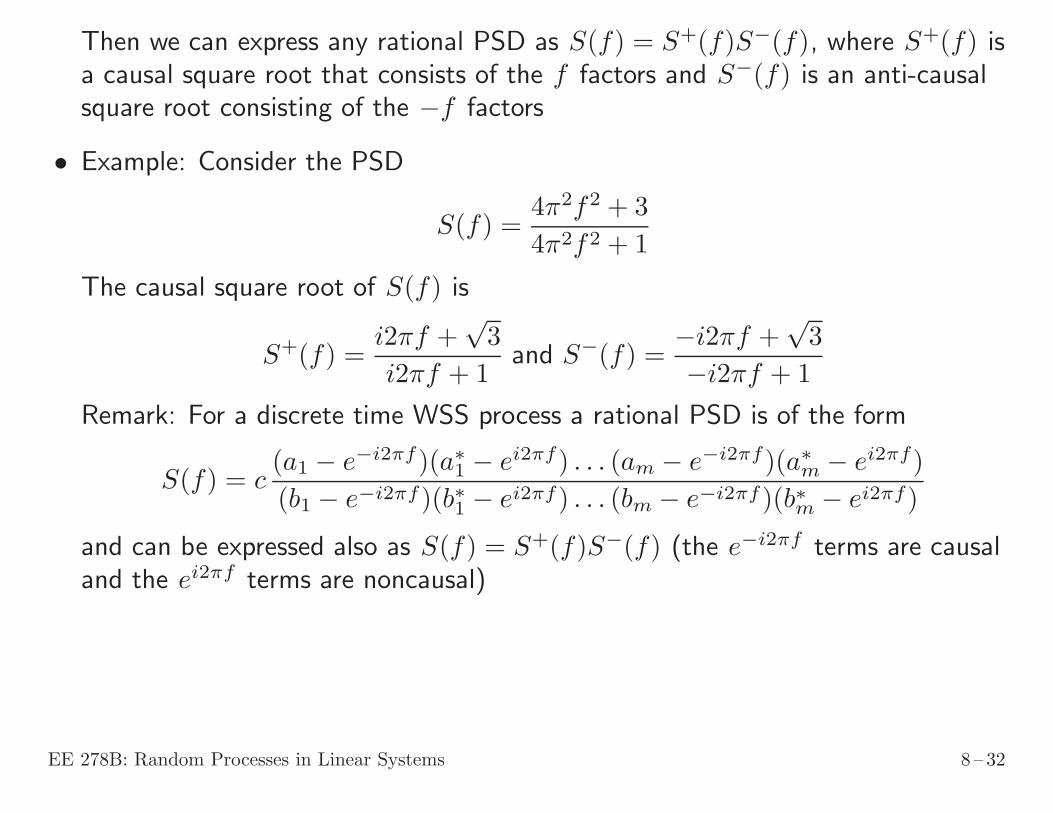
Then we can express any rational PSD as S(f) = S+(f)S−(f), where S+(f) isa causal square root that consists of the f factors and S−(f) is an anti-causalsquare root consisting of the −f factors
• Example: Consider the PSD
S(f) =4π2f2 + 3
4π2f2 + 1
The causal square root of S(f) is
S+(f) =i2πf +
√3
i2πf + 1and S−(f) =
−i2πf +√3
−i2πf + 1
Remark: For a discrete time WSS process a rational PSD is of the form
S(f) = c(a1 − e−i2πf)(a∗1 − ei2πf) . . . (am − e−i2πf)(a∗m − ei2πf)
(b1 − e−i2πf)(b∗1 − ei2πf) . . . (bm − e−i2πf)(b∗m − ei2πf)
and can be expressed also as S(f) = S+(f)S−(f) (the e−i2πf terms are causaland the ei2πf terms are noncausal)
EE 278B: Random Processes in Linear Systems 8 – 32

• Example: Consider the PSD for a discrete time process
S(f) =3
5− 4 cos(2πf)
The causal square root is
S+(f) =
√3
2− e−i2πfand S−(f) =
√3
2− ei2πf
Spectral factorization theorem: In general, a PSD S(f) has a causal square rootif it satisfies the Paley-Wiener condition
∫ ∞
−∞
logS(f)
1 + 4π2fdf > −∞ for continuous time process
∫ 1/2
−1/2
logS(f) df > −∞ for discrete time process
• These condition are not always satisfied. For example they are not satisfied forbandlimited processes
• Remark: We assume throughout that F−1[S+(f)] is real ; henceS−(f) = S+(−f)
EE 278B: Random Processes in Linear Systems 8 – 33
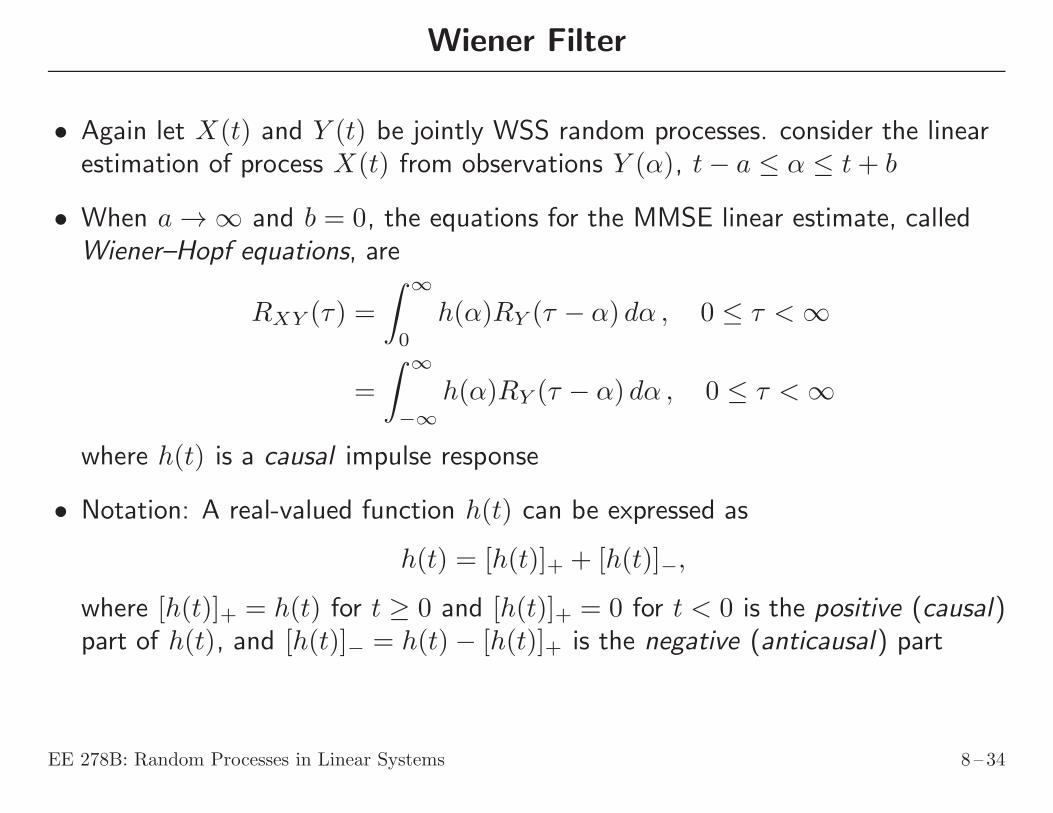
Wiener Filter
• Again let X(t) and Y (t) be jointly WSS random processes. consider the linearestimation of process X(t) from observations Y (α), t− a ≤ α ≤ t+ b
• When a → ∞ and b = 0, the equations for the MMSE linear estimate, calledWiener–Hopf equations, are
RXY (τ) =
∫ ∞
0
h(α)RY (τ − α) dα , 0 ≤ τ < ∞
=
∫ ∞
−∞
h(α)RY (τ − α) dα , 0 ≤ τ < ∞
where h(t) is a causal impulse response
• Notation: A real-valued function h(t) can be expressed as
h(t) = [h(t)]+ + [h(t)]−,
where [h(t)]+ = h(t) for t ≥ 0 and [h(t)]+ = 0 for t < 0 is the positive (causal)part of h(t), and [h(t)]− = h(t)− [h(t)]+ is the negative (anticausal) part
EE 278B: Random Processes in Linear Systems 8 – 34
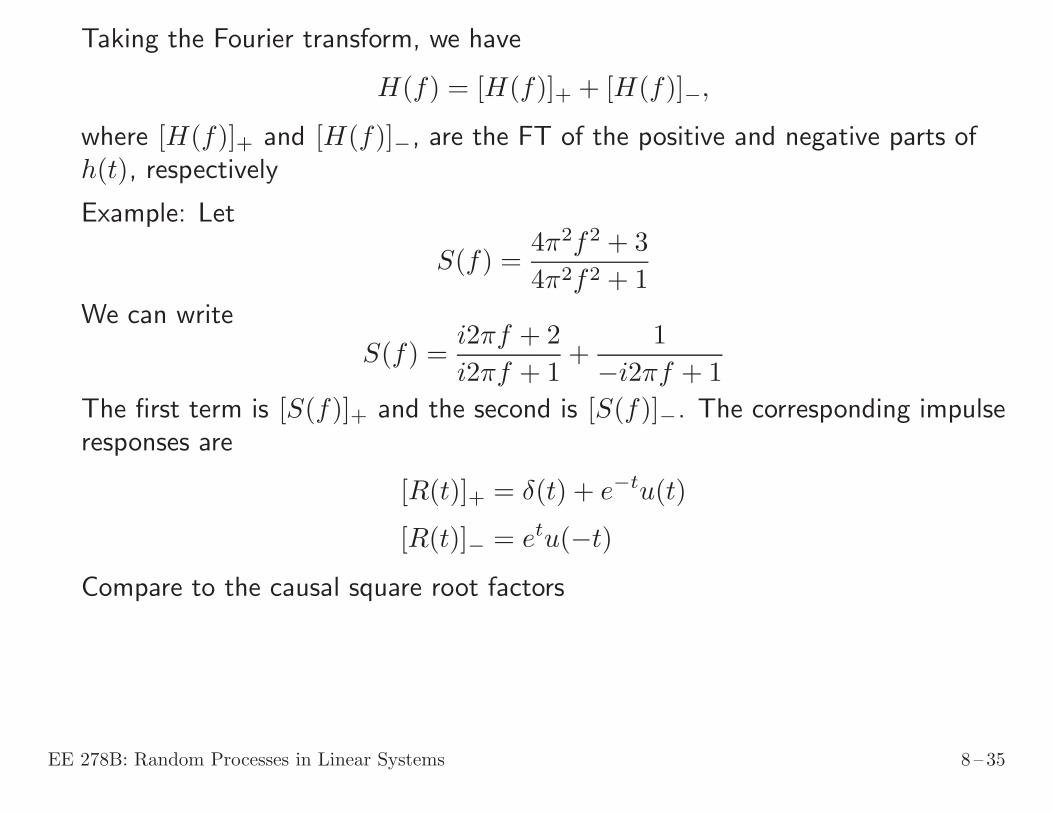
Taking the Fourier transform, we have
H(f) = [H(f)]+ + [H(f)]−,
where [H(f)]+ and [H(f)]−, are the FT of the positive and negative parts ofh(t), respectively
Example: Let
S(f) =4π2f2 + 3
4π2f2 + 1
We can write
S(f) =i2πf + 2
i2πf + 1+
1
−i2πf + 1
The first term is [S(f)]+ and the second is [S(f)]−. The corresponding impulseresponses are
[R(t)]+ = δ(t) + e−tu(t)
[R(t)]− = etu(−t)
Compare to the causal square root factors
EE 278B: Random Processes in Linear Systems 8 – 35

• Now, back to the linear estimation problem. First assume that the observationprocess Y (τ) is white, i.e., RY (τ) = δ(τ), then the Wiener–Hopf equationsreduce to
RXY (τ) = h(τ) , 0 ≤ τ < ∞,
i.e., h(τ) = [RXY (τ)]+
and the corresponding transfer function is
H(f) =
∫ ∞
0
RXY (τ)e−2πifτ dτ,
i.e., H(f) = [SXY (f)]+
• For general SY (f) with causal square root S+Y (f), we first whiten the process to
obtain Y (τ) with RY (τ) = δ(τ), then convolve with [RXY (τ)]+
Y (t)1
S+Y(f) X(t)
Y (t)[SXY (f)]+
EE 278B: Random Processes in Linear Systems 8 – 36

• Now to find RXY (τ), let g(t) = F−1[1/S+Y (f)] and consider
RXY (τ) = E(X(t+ τ)Y (τ))
= E(X(t+ τ)Y (t) ∗ g(t))= RXY (τ) ∗ g(−τ)
Taking the Fourier Transform we have
SXY (f) =SXY (f)
S−Y (f)
Hence,
[SXY (f)]+ =
[
SXY (f)
S−Y (f)
]
+
The transfer function of the Wiener filter is then given by
H(f) =1
S+Y (f)
[
SXY (f)
S−Y (f)
]
+
EE 278B: Random Processes in Linear Systems 8 – 37
• To find the MMSE, we follow similar steps to the infinite smoothing case toobtain
MSE =
∫ ∞
−∞
(
SX(f)−∣
∣
∣
∣
[
SXY (f)
S−Y (f)
]
+
∣
∣
∣
∣
2)
df
• Example: Consider a continuous-time RP X(t) with
SX(f) =2
1 + 4π2f2
and the noisy observation Y (t) = X(t) + Z(t), where Z(t) is white noiseuncorrelated with X(t) with SZ(f) = 1
To compute the Wiener filter, we first factor the PSD
SY (f) = SX(f) + SZ(f) =4π2f2 + 3
4π2f2 + 1
to obtain
S+Y (f) =
i2πf +√3
i2πf + 1,
S−Y (f) =
−i2πf +√3
−i2πf + 1
EE 278B: Random Processes in Linear Systems 8 – 38

The crosspower spectral density SXY (f) = SX(f), hence
SXY (f)
S−Y (f)
=2
1 + 4π2f2· −i2πf + 1
−i2πf +√3
=2
(i2πf + 1)(−i2πf +√3)
=
√3− 1
i2πf + 1+
√3− 1
−i2πf +√3
The first term is causal and the second term is anticausal. Therefore,[
SXY (f)
S−Y (f)
]
+
=
√3− 1
i2πf + 1
Hence, the Wiener filter is
H(f) =
√3− 1
i2πf +√3
h(t) = (√3− 1) e−
√3t u(t)
EE 278B: Random Processes in Linear Systems 8 – 39

The MSE is
MSE =
∫ ∞
−∞
2√3− 2
1 + 4π2f2df =
√3− 1
• Example: Consider a discrete-time RP X(t) with
SX(f) =3
5− 4 cos(2πf)
and the noisy observation Y (t) = X(t) + Z(t), where Z(t) is white noise,independent of X(t), with SZ(f) = 1
Again we factor the PSD
SY (f) = SX(f) + SZ(f) =8− 4 cos(2πf)
5− 4 cos(2πf)
to obtain
S+Y (f) =
√
4− 2√3 · 2 +
√3− e−i2πf
2− e−i2πf
S−Y (f) =
√
4− 2√3 · 2 +
√3− ei2πf
2− ei2πf
EE 278B: Random Processes in Linear Systems 8 – 40
The crosspower spectral density is SXY (f) = SX(f) and
SXY (f)
S−Y (f)
=3
√
4− 2√3· 1
(2− e−i2πf)(2 +√3− e−i2πf)
=
√
12− 6√3
2− e−i2πf+
√
3− 3√3/2
2 +√3− ei2πf
The first term is causal and the second term is anticausal. Therefore[
SXY (f)
S−Y (f)
]
+
=
√
12− 6√3
2− e−i2πf
Hence, the Wiener filter is
H(f) =
√3
2 +√3 + e−i2πf
h(n) = (2√3− 3) (2−
√3)n u(n)
EE 278B: Random Processes in Linear Systems 8 – 41
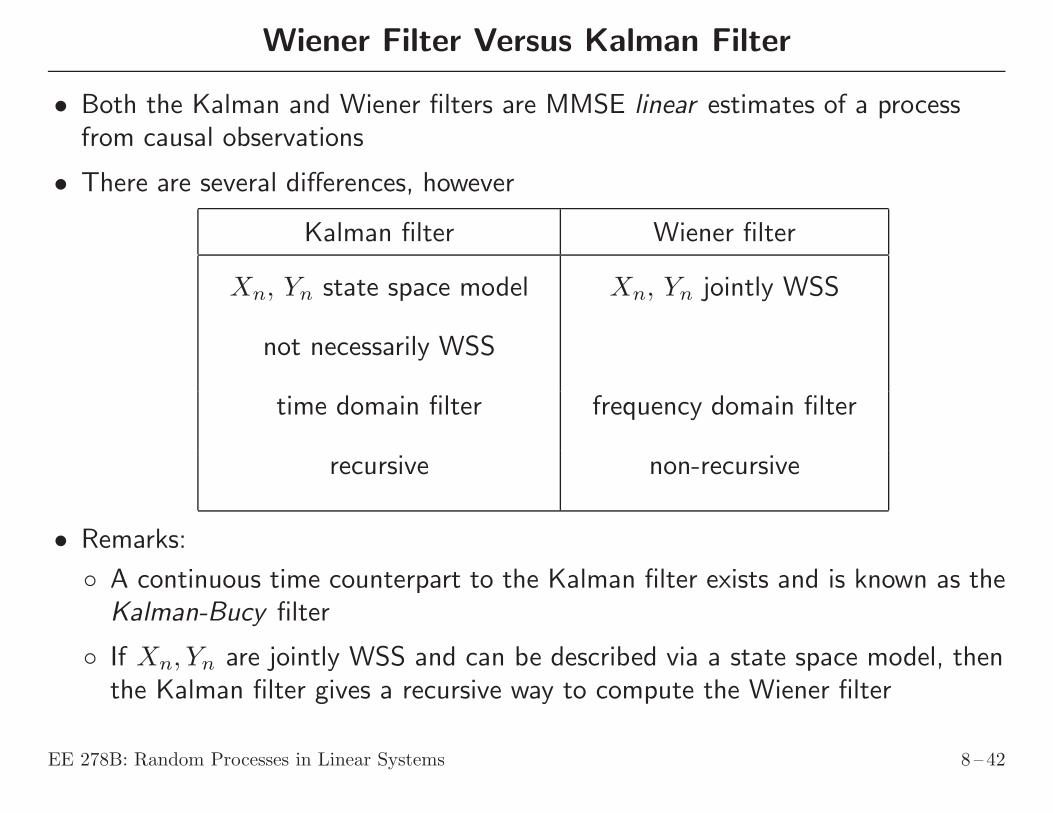
Wiener Filter Versus Kalman Filter
• Both the Kalman and Wiener filters are MMSE linear estimates of a processfrom causal observations
• There are several differences, however
Kalman filter Wiener filter
Xn, Yn state space model Xn, Yn jointly WSS
not necessarily WSS
time domain filter frequency domain filter
recursive non-recursive
• Remarks:
◦ A continuous time counterpart to the Kalman filter exists and is known as theKalman-Bucy filter
◦ If Xn, Yn are jointly WSS and can be described via a state space model, thenthe Kalman filter gives a recursive way to compute the Wiener filter
EE 278B: Random Processes in Linear Systems 8 – 42