limit cycle hunting of a bogie with flanged wheels
TRANSCRIPT

This article was downloaded by: [ECU Libraries]On: 29 June 2014, At: 02:12Publisher: Taylor & FrancisInforma Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mortimer House,37-41 Mortimer Street, London W1T 3JH, UK
Vehicle System Dynamics: International Journal ofVehicle Mechanics and MobilityPublication details, including instructions for authors and subscription information:http://www.tandfonline.com/loi/nvsd20
Limit Cycle Hunting of a Bogie with Flanged WheelsYI-REN YANG aa Institute of Applied Mechanics, Southwest Jiaotong University , Chengdu, P.R. ChinaPublished online: 27 Jul 2007.
To cite this article: YI-REN YANG (1995) Limit Cycle Hunting of a Bogie with Flanged Wheels, Vehicle System Dynamics:International Journal of Vehicle Mechanics and Mobility, 24:3, 185-196
To link to this article: http://dx.doi.org/10.1080/00423119508969087
PLEASE SCROLL DOWN FOR ARTICLE
Taylor & Francis makes every effort to ensure the accuracy of all the information (the “Content”) containedin the publications on our platform. However, Taylor & Francis, our agents, and our licensors make norepresentations or warranties whatsoever as to the accuracy, completeness, or suitability for any purpose of theContent. Any opinions and views expressed in this publication are the opinions and views of the authors, andare not the views of or endorsed by Taylor & Francis. The accuracy of the Content should not be relied upon andshould be independently verified with primary sources of information. Taylor and Francis shall not be liable forany losses, actions, claims, proceedings, demands, costs, expenses, damages, and other liabilities whatsoeveror howsoever caused arising directly or indirectly in connection with, in relation to or arising out of the use ofthe Content.
This article may be used for research, teaching, and private study purposes. Any substantial or systematicreproduction, redistribution, reselling, loan, sub-licensing, systematic supply, or distribution in anyform to anyone is expressly forbidden. Terms & Conditions of access and use can be found at http://www.tandfonline.com/page/terms-and-conditions

Vehicle System Dynamics, 24 (1995), pp. 185-196 0042-3 1 14/95/2403- 18556.00 0 Swets & Zeitlinger
Limit Cycle Hunting of a Bogie with Flanged Wheels
YI-REN YANG*
SUMMARY
When the equivalent linearization method is used to analyze limit cycle hunting of a bogie with more than one nonlinearity, the difficulty of incompatibility between the input amplitudes used to calcu- late the equivalent properties of nonlinearities and the corresponding output deflections arises. It is the aim of the present paper to develop a method based on optimization theory to solve the incom- patibility. The heuristic analysis scheme of flutter system with one nonlinearity[l6] is developed to analyze the stability of limit cycle hunting of a bogie. The results of numerical integration suffi- ciently support the analytical method developed in this paper.
1. INTRODUCTION
Many studies [l-101 have proved that the equivalent linearization methods (e.g. describing function method, harmonic balance method, etc.) can give satisfac- tory analytical results for the periodic solutions of the nonlinear differential equations of the wheel-rail system. When a system involves more than one nonlinearity, however, a difficulty is created by applying the equivalent linear- ization approach to the analysis of limit cycle hunting of the system, that is just the incompatibility between the input amplitudes used to calculate the equivalent properties of nonlinearities involved and the corresponding output deflections. For example, in analysis of limit cycle flutter of an airplane with nonlinear control characteristics, Breitbach [I l l has had to use an iterative procedure to solve the incompatibility. But the iterative procedure associates with the differential with respect to the amplitudes, which can be calculated only by numerical methods for complex engineering problems.
We will discuss hereforth the limit cycle hunting of a bogie with flanged wheels. Based on the equivalent linearization method, an optimization method [12] is used to solve the incompatibility. Apart from this, a direct engineering method is also developed to analyzes the stability of the limit cycle hunting of the bogie.
*Institute of Applied Mechanics, Southwest Jiaotong University, Chengdu, P.R. China.
Dow
nloa
ded
by [
EC
U L
ibra
ries
] at
02:
12 2
9 Ju
ne 2
014
YI-REN YANG
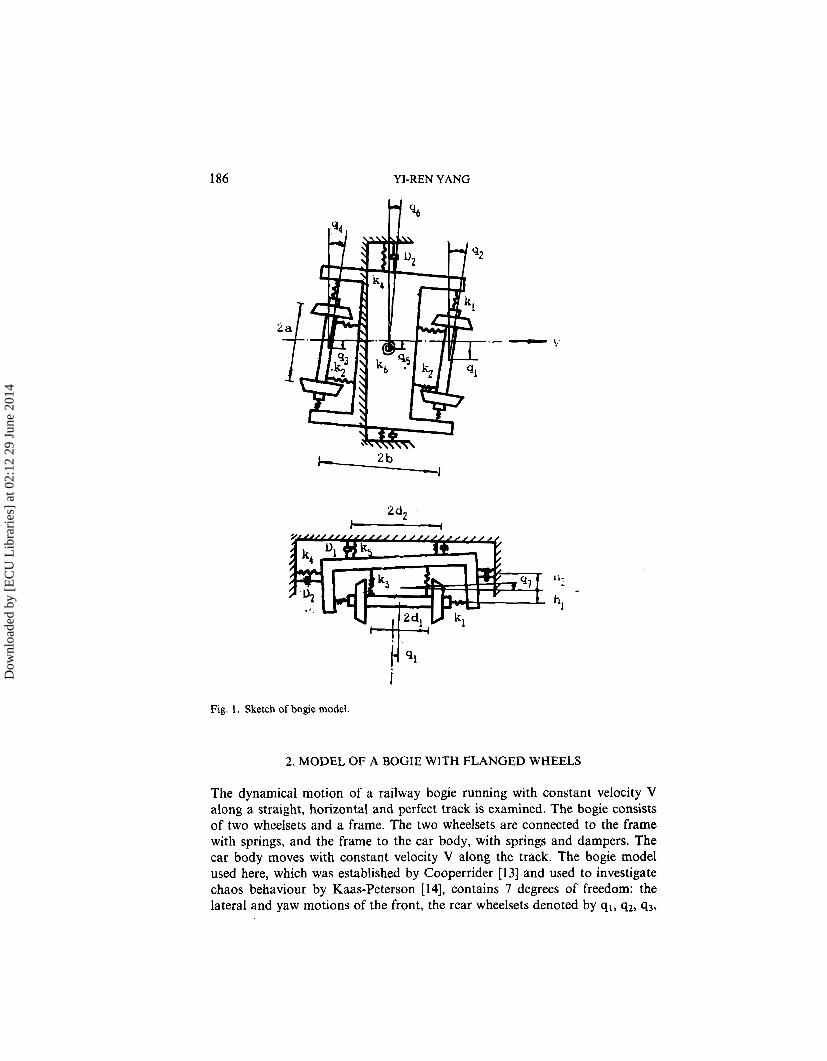
Fig. 1 . Sketch of bogie model.
2. MODEL OF A BOGIE WITH FLANGED WHEELS
The dynamical motion of a railway bogie running with constant velocity V along a straight, horizontal and perfect track is examined. The bogie consists of two wheelsets and a frame. The two wheelsets are connected to the frame with springs, and the frame to the car body, with springs and dampers. The car body moves with constant velocity V along the track. The bogie model used here, which was established by Cooperrider [13] and used to investigate chaos behaviour by Kaas-Peterson [14], contains 7 degrees of freedom: the lateral and yaw motions of the front, the rear wheelsets denoted by q,, q2, q 3 ,
Dow
nloa
ded
by [
EC
U L
ibra
ries
] at
02:
12 2
9 Ju
ne 2
014

LIMIT CYCLE HUNTING OF A BOGIE 187 ,
q4; the lateral, yaw and roll motions of the frame denoted by q5, q6, q 7 The sketch of the bogie model is seen in Fig. 1.
Here, the effect of the flange-rail force on the limit cycle hunting of the bogie and the introduction of analytical method are emphasized. Only the flange-rail forces are nonlinear, which can be expressed as [13]
where,
KO - lateral stiffness of the rail yo - clearance between the wheel flange and the rail y - lateral displacement of the wheelset.
When the wheels are centred on the track, they are conical with a conicity of h and a radius of ro . The creep forces are linear. The governing differential equations of the bogie in the lateral direction are
where
Dow
nloa
ded
by [
EC
U L
ibra
ries
] at
02:
12 2
9 Ju
ne 2
014

YI-REN YANG
fl f22, f23, f33 - creep coefficients M,, I,,, Mf, Ify, If, - general masses of wheelset and frame W - axle load
The others can be seen in Fig. 1. The values of the main parameters in Eq.(2) are M, = 1022 kg, Mf =
2918 kg, I,, = 678 kgm2, If, = 6780 kgm2, If, = 6780 kgrn2, K = 20 MN/m, K I = 3 MN/m, K2 = 10 MN/m, K3 = 1 MN/m, K4 = 0.14 MN/m, Kg =
0.9 MN/m, K6 = 2.71 MN . m, Dl = 20 KNs/m, D2 = 29.2 KNs/m, a =
0.716m, b = 1.074m, d l=0 .62m, d2=0.68m, hi=0.0762m, h 2 = 0.6584m, h=0.05, W=O.l3334MN, yo=0.0091m, ro=0.4572m. The spring stiffnesses, K I , K2, . . . , K5, are different from those of Ref. [13]. The set of parameters does not describe an actual bogie.
3. EQUIVALENT LINEARIZATION ANALYSIS
The governing differential equations are written in the following general form
where
M - mass matrix; C - damping matrix; K - stiffness matrix; f - nonlinear force column; x - general displacement column.
The equivalent linear force vector, f is
where Keq and Ceq depend on the assumed amplitudes of the nonlinear com- ponents, a , , a2, . . . , a,, (r is the number of the nonlinear components) and the assumed frequency of the system oscillation, a.
Substituting (4) into (3) yields
where K, = K + K,,; Ce = C + C,,.
Dow
nloa
ded
by [
EC
U L
ibra
ries
] at
02:
12 2
9 Ju
ne 2
014

LIMIT CYCLE HUNTING OF A BOGIE 189
The corresponding first order differential equations of (5) are
where matrix A is a function of the assumed amplitudes, a] , a2, . . . , a,, the assumed frequency o and V.
Taking a set of initial values of a] , a2, . . . , a, and o (called inputs), the critical hunting speed and frequency, denoted by Vh and oh, can be obtained by solving the eigenvalue problem when a double purely imaginary roots appear. Owing to the corresponding eigenvectors, the ratios between the corresponding ampli- tudes of the nonlinear components (called outputs) can be determined as
When r > 1, which means that the system involves more than one nonlinearity, there will arise the incompatibility between the inputs and the outputs. It is obvious that bl , b2, . . . , b, and oh are functions of a,, a2, . . . , a, and o , denoted by:
a l , a2, . . . , a, and o represent a compatible set of solutions if and only if the following conditions are satisfied:
where c denotes the constant ratio. Generally speaking, it is difficult for (7) to be exactly satisfied. One can
rewrite (7) into the following form
By means of (8), an objective function can be defined:
When F = 0, a] , a2, . . . , a,, o are a consistent set of solutions. In general, it can be assumed that a l is correct and kept constant. Thus the compatibility between
Dow
nloa
ded
by [
EC
U L
ibra
ries
] at
02:
12 2
9 Ju
ne 2
014

190 YI-REN YANG
the inputs and the outputs is changed into the following optimization problem:
Designed variables: a2, a3, . . . , ar, C, w r
Objective function: Fun = x ( a i - chi)' + (y - i = 1
(9)
Restraints: q > O , i = 1,2 ,..., r , o > O , c > O
where, b,, bZ, . . . , b,, and result from (6 ) with a set of initial values of a,, a;?, . . . , a,, w, and the initial value of c is unity.
Jacob's method [I21 is used to calculate the optimization problem of (9), regardless of the differential when determining optimal direction.
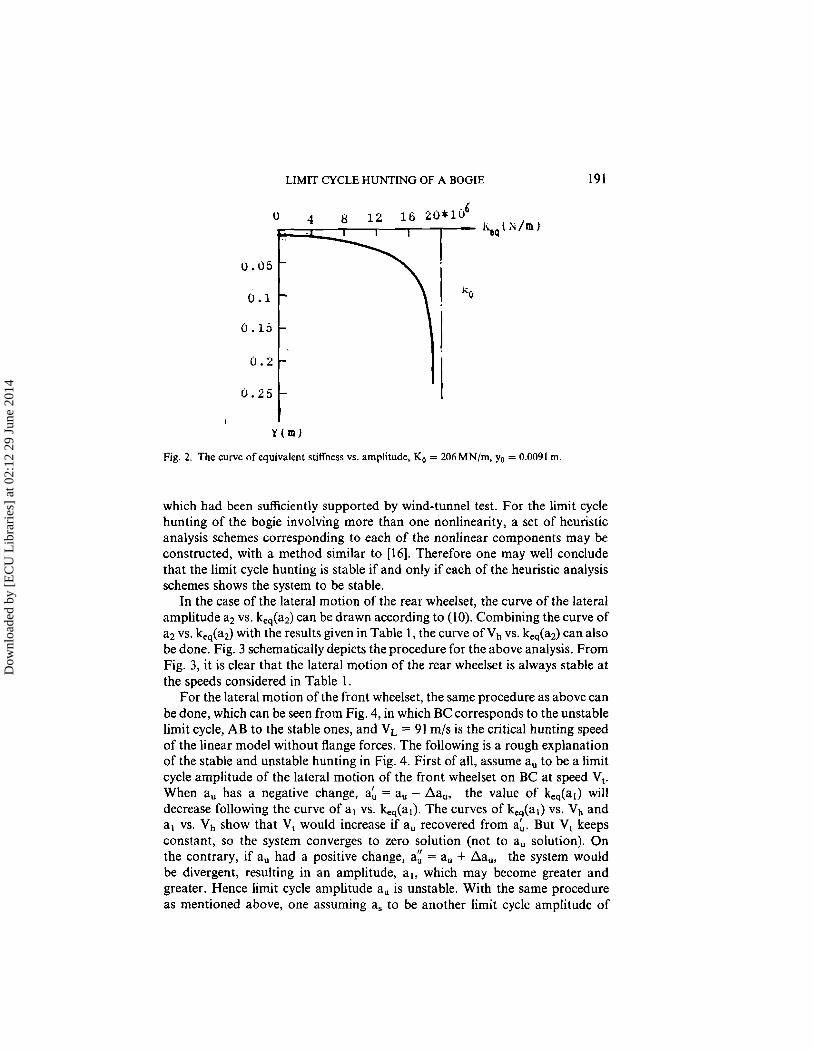
Only the lateral motions of the front wheelset and the rear wheelset involve nonlinearities for the bogie model used here, so r = 2 . The second order asymp- totic solutions of KBM method [15], which consider the effect of high order harmonics on the equivalent linearized stiffness, are used to calculate the equivalent linearized stiffness of nonlinearity (I ) , the result of which is
where to = arc cos(yo/Y); Y- Amplitude of lateral motion of wheelset; Li = sin(ito)/i, i = (n - I), (n + I)
When Y = al , keq = (al) is the equivalent stiffness of the rail acting on the front wheelset; Y = a2, keq(a2) the equivalent stiffness of the rail acting on the rear wheelset. Here, al is the assumed amplitude of the lateral motion of the front wheelset, ql , and a2 the assumed amplitude of the lateral motion of the rear wheelset, q3. So bl is the element of the eigenvector, which corresponds to q l , bZ the element of the eigenvector, which corresponds to q3. Fig. 2 is the schematic illustration of k,,V) vs. Y according to (lo), and shows that the nonlinearities are hard springs. So Keq(l,l) = keq(al), Keq(3,3) = bq(a2) and the other elements of K,, are zero, and the matrix Ceq = 0. The solutions of the bogie hunting are listed in Table 1.
4. STABILITY OF LIMIT CYCLE HUNTING
4.1 Determination of the Stability of Limit Cycle Hunting In view of limit cycle flutter of a wing with store involving only one non-
linearity, Z.C. Yang [16] developed a method for demonstrating the stability condition of limit cycle flutter by constructing a heuristic analysis scheme,
Dow
nloa
ded
by [
EC
U L
ibra
ries
] at
02:
12 2
9 Ju
ne 2
014
LIMIT CYCLE HUNTING OF A BOGIE
Fig. 2. The curve of equivalent stiffness vs. amplitude, & = 206MN/m, yo = 0.0091 m.
which had been sufficiently supported by wind-tunnel test. For the limit cycle hunting of the bogie involving more than one nonlinearity, a set of heuristic analysis schemes corresponding to each of the nonlinear components may be constructed, with a method similar to [16]. Therefore one may well conclude that the limit cycle hunting is stable if and only if each of the heuristic analysis schemes shows the system to be stable.
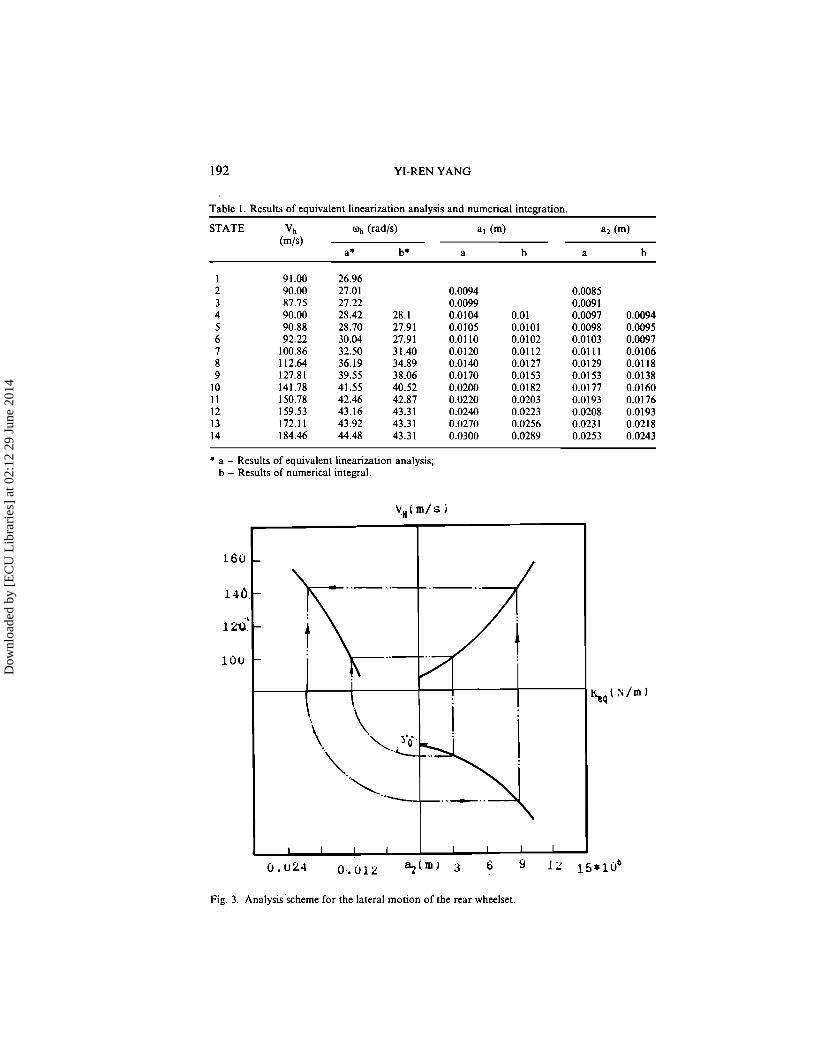
In the case of the lateral motion of the rear wheelset, the curve of the lateral amplitude a2 vs. keq(a2) can be drawn according to (10). Combining the curve of a2 vs. ke,(az) with the results given in Table 1, the curve of Vh VS, keq(a2) can also be done. Fig. 3 schematically depicts the procedure for the above analysis. From Fig. 3, it is clear that the lateral motion of the rear wheelset is always stable at the speeds considered in Table 1.
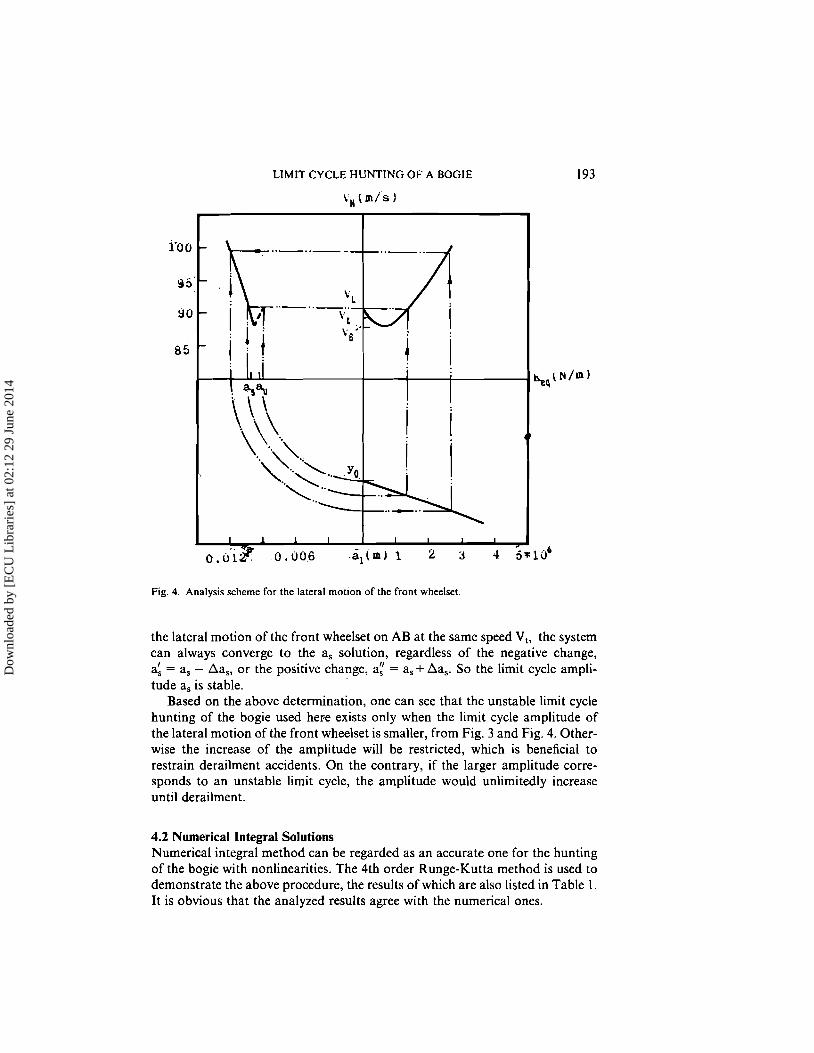
For the lateral motion of the front wheelset, the same procedure as above can be done, which can be seen from Fig. 4, in which BC corresponds to the unstable limit cycle, AB to the stable ones, and VL = 91 m/s is the critical hunting speed of the linear model without flange forces. The following is a rough explanation of the stable and unstable hunting in Fig. 4. First of all, assume a, to be a limit cycle amplitude of the lateral motion of the front wheelset on BC at speed V,. When a, has a negative change, a: = a, - Aa,, the value of keq(al) will decrease following the curve of a ] vs. ke,(al). The curves of k,,(al) vs. Vh and a, vs. Vh show that V, would increase if a, recovered from a:. But V, keeps constant, so the system converges to zero solution (not to a, solution). On the contrary, if a, had a positive change, a: = a, + Aa,, the system would be divergent, resulting in an amplitude, a,, which may become greater and greater. Hence limit cycle amplitude a, is unstable. With the same procedure as mentioned above, one assuming a, to be another limit cycle amplitude of
Dow
nloa
ded
by [
EC
U L
ibra
ries
] at
02:
12 2
9 Ju
ne 2
014
192 YI-REN YANG
Table 1. Results of equivalent linearization analysis and numerical integration.
STATE Vh Oh (rad/s) a1 (m) a2 ( 4 (mls)
a* b* a b a b
1 91.00 26.96 2 90.00 27.01 0.0094 0.0085 3 87.75 27.22 0.0099 0.0091 4 90.00 28.42 28.1 0.0104 0.01 0.0097 0.0094 5 90.88 28.70 27.91 0.0105 0.0101 0.0098 0.0095 6 92.22 30.04 27.91 0.01 10 0.0102 0.0103 0.0097 7 100.86 32.50 31.40 0.0120 0.01 12 0.01 11 0.0106 8 112.64 36.19 34.89 0.0140 0.0127 0.0129 0.0118 9 127.81 39.55 38.06 0.0170 0.0153 0.01 53 0.0138
10 141.78 41.55 40.52 0.0200 0.0182 0.0177 0.0160 11 150.78 42.46 42.87 0.0220 0.0203 0.0193 0.0176 12 159.53 43.16 43.31 0.0240 0.0223 0.0208 0.0193 13 172.1 1 43.92 43.31 0.0270 0.0256 0.0231 0.021 8 14 184.46 44.48 43.31 0.0300 0.0289 0.0253 0.0243
a - Results of equivalent linearization analysis; b - Results of numerical integral.
Dow
nloa
ded
by [
EC
U L
ibra
ries
] at
02:
12 2
9 Ju
ne 2
014
LIMIT CYCLE HUNTING OF A BOGIE
Fig. 4. Analysis scheme for the lateral motion of the front wheelset
the lateral motion of the front wheelset on AB at the same speed V,, the system can always converge to the a, solution, regardless of the negative change, a: = a, - Aa,, or the positive change, a! = a,+ ha,. So the limit cycle ampli- tude a, is stable.
Based on the above determination, one can see that the unstable limit cycle hunting of the bogie used here exists only when the limit cycle amplitude of the lateral motion of the front wheelset is smaller, from Fig. 3 and Fig. 4. Other- wise the increase of the amplitude will be restricted, whlch is beneficial to restrain derailment accidents. On the contrary, if the larger amplitude corre- sponds to an unstable limit cycle, the amplitude would unlimitedly increase until derailment.
4.2 Numerical Integral Solutions Numerical integral method can be regarded as an accurate one for the hunting of the bogie with nonlinearities. The 4th order Runge-Kutta method is used to demonstrate the above procedure, the results of which are also listed in Table 1. It is obvious that the analyzed results agree with the numerical ones.
Dow
nloa
ded
by [
EC
U L
ibra
ries
] at
02:
12 2
9 Ju
ne 2
014
YI-REN YANG
9,t")
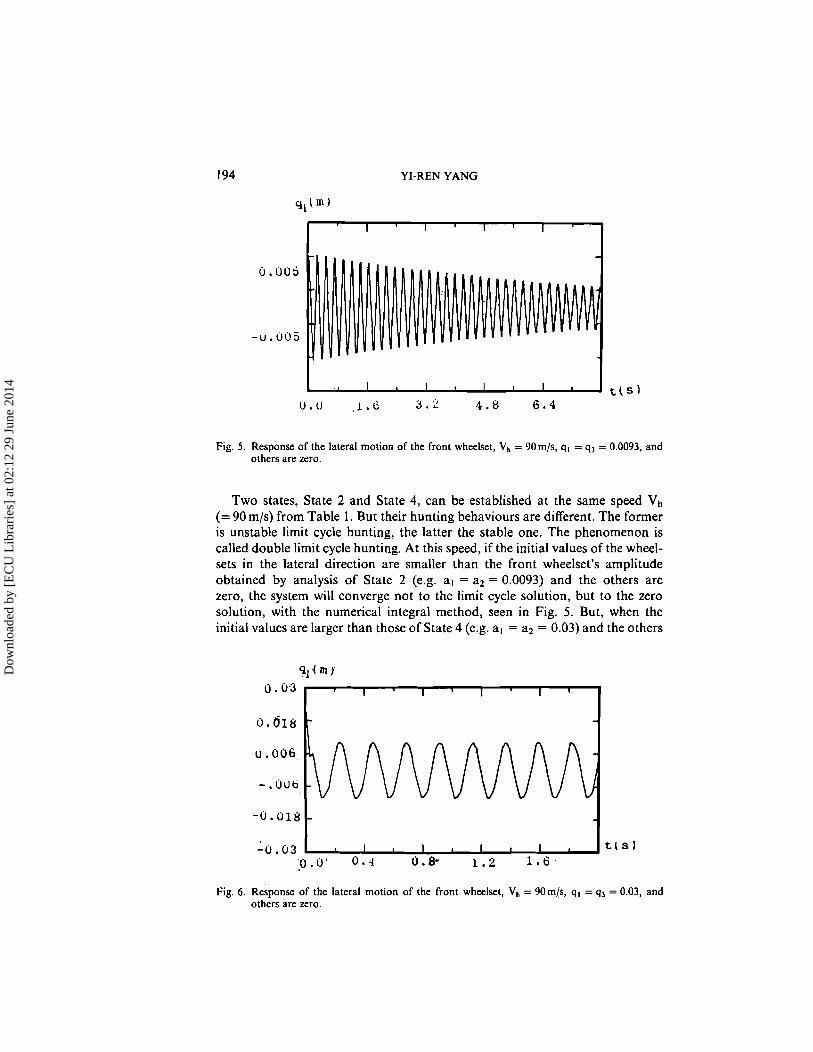
Fig. 5. Response of the lateral motion of the front wheelset, Vh = 90m/s, ql = q3 = 0.0093, and others are zero.
Two states, State 2 and State 4, can be established at the same speed Vh (= 90 m/s) from Table 1. But their hunting behaviours are different. The former is unstable limit cycle hunting, the latter the stable one. The phenomenon is called double limit cycle hunting. At this speed, if the initial values of the wheel- sets in the lateral direction are smaller than the front wheelset's amplitude obtained by analysis of State 2 (e.g. a , = a2 = 0.0093) and the others are zero, the system will converge not to the limit cycle solution, but to the zero solution, with the numerical integral method, seen in Fig. 5. But, when the initial values are larger than those of State 4 (e.g. a , = a2 = 0.03) and the others
Fig. 6. ~ e i ~ o n s e of the lateral motion of the front wheelset, Vh = 90m/s, ql = q3 = 0.03, and others are zero.
Dow
nloa
ded
by [
EC
U L
ibra
ries
] at
02:
12 2
9 Ju
ne 2
014

LIMIT CYCLE HUNTING OF A BOGIE 195
are also zero, the limit cycle solution of State 4 will be obtained, as shown in Fig.4. It is evident that there is a hollow on the curve of b,(al) vs. Vh (Fig. 4) below the linear hunting speed VL (State 1 in Table l), which explains well why hunting appears at speeds lower than VL (e.g. State 4 in Table 1) [13].
5. CONCLUSIONS
By means of optimization theory, a method is developed to solve the incompat- ibility between the input amplitudes used to calculate the equivalent properties of nonlinearities involved and the corresponding output deflections, which is created by applying the equivalent linearization approach to analysis of limit cycle hunting of a bogie with more than one nonlinearity.
By extending the heuristic analysis scheme developed in a flutter system with one nonlinearity [16] to a bogie with more than one nonlinearity, the equivalent linearization method can be used to explain the limit cycle hunting states of the bogie.
The flange forces make the limit cycle hunting with larger amplitude stable, which restricts in the increase of the amplitude and is advantageous to the restraint of derailment.
The hollow on the curve of k,,(al) vs. Vh below the linear hunting speed VL makes the hunting behaviour at speeds lower than VL possible.
REFERENCES
1. Hauchild, W., The Application of Quasilinearization to the Limit Cycle Behaviour of the Non- linear Wheel-Rail System. Proc. of 6th IAVSD Symposium on Dynamics of Vehicles on Roads & Tracks, Berlin, Sept. 1979.
2. Garg, D.P., Describing Function Techniques for the NonlinearAnalysis of the Dynamics of a Railway Vehicle Wheelset. U.S. DOT Report FRA-OR & D-75-83, July 1975.
3. Law, E.H. and Brand, R.S., Analysis of the Nonlinear Dynamics of a Railway Vehicle Wheelset. ASME J. of Dynamic System, Measurement, and Control, Vol. 95, No. 1, March 1973.
4. Hannebrink, D.N., Influence of Axle Load, Truck Gauge, and Wheel Profile on Rail Vehicle Hunting. ASME J. of Engineering for Industry, Vo1.99, No.1, Feb. 1977.
S.Cooperrider, N.K., Hedrick, J.K., Law, E.H., Malstrom, C.W., The Application of Quasi- Linearization to the Prediction of Nonlinear Railway Vehicle Response. Vehicle System Dynamics, Vol. 4, No. 2-3, July 1975.
6. Hull, R., Cooperrider, N.K., Influence of Nonlinear Wheel/Rail Contact Geometry on Stability of Rail Vehicle. ASME Paper No. 76-WA/RT-2, 1976.
7. Hedrick, J.K. et al., The Application of Quasilinearization Techniques to Rail Vehicle Dynamic Analysis. U.S. DOT Report FRA/OR & D-78/56, Nov. 1978.
8. D'Souza, A.F., Caravatna, P., Analysis of Nonlinear Hunting Vibrations of Rail Vehicle Trucks. ASME J. of Mechanical Design, Vol. 102, January 1980.
9. Meolle, D., Gasch,R., Nonlinear Bogie Hunting. Proceedings of the 7th IAVSD Symposium, Cambridge, England, 1981.
10. Gasch, R., Meolle. D., Knothe, K., The Effect of Nonlinearities on the Limit Cycle of Railway Vehicles. Proceedings of 8th IAVSD Symposium, Cambridge, MA, 1983.
11. Breitbach, E.J., Flutter Analysis of an Airplane with Multiple Structuial Nonlinearities in the Control System. NASA TP-1620, 1980.
Dow
nloa
ded
by [
EC
U L
ibra
ries
] at
02:
12 2
9 Ju
ne 2
014

196 YI-REN YANG
12. Jacob, H.G., Rechnergestiitzte Optimierung Statischer und Dynamischer Systeme Beispiele mit FORTRAN-Programmen. Springer-Verlag, 1982.
13. Cooperrider, N.,K., The Hunting Behaviour of Conventional Railway Trucks. Trans. of the ASME, J. of Eng. for Industry, Vol. 94, No. 2, 1972.
14. Kaas-Peterson, Ch., Chaos in a Railway Bogie. Acta Mechanica, Vol. 61, 1986. 15. Briley, R.P., Gubser, J.L., Investigation of Limit Cycle Response of Aerodynamic Surfaces with
Structural Nonlinearities. AFOSR-TR-83-0232, 1982. 16. Yang, Z.C., Zhao, L.C., Analysis of Limit Cycle Flutter of an Airfoil in Incompressible Flow.
J. of Sound and Vibration, Vol. 123, No. 1, 1988.
Dow
nloa
ded
by [
EC
U L
ibra
ries
] at
02:
12 2
9 Ju
ne 2
014