lie group formulation for robot mechanics
TRANSCRIPT
Terry Taewoong Um ([email protected])
University of Waterloo
Department of Electrical & Computer Engineering
Terry Taewoong Um
LIE GROUP FORMULATION
FOR ROBOT MECHANICS
1
Terry Taewoong Um ([email protected])
CONTENTS
1. Motion and Lie Group
2. Kinematics and Dynamics
3. Summary + Q&A
2


Terry Taewoong Um ([email protected])
MOTIVATION
4
• Coordinate-free approach
http://arxiv.org/pdf/1404.1100.pdf
- Which coordinate should we choose?
- Let’s remove the dependency on the choice of reference frames!
→ Use the right representation for motion → Lie group & Lie algebra
[Newton-Euler formulation]
- Geodesic : a shortest path b/w two points
- Euler angle-based trajectory is not a geodesic!

Terry Taewoong Um ([email protected])
PRELIMINARY
5
• Differential Manifolds
Implicit representation
Explicit representation
Local coordinate
n-dim manifold is a set that locally resembles n-dim Euclidean space
- Each point of an n-dimensional manifold has a neighbourhood that is homeomorphic to the Euclidean space of dimension n.
Local coordinate : vector space! Riemannian metric
Minimal geodesics
distortion

Terry Taewoong Um ([email protected])6
- General Linear Group, GL(n)
: 𝑛 × 𝑛 invertible matrices with matrix multiplication
PRELIMINARY
- Special Linear Group, SL(n) : GL(n) with determinant 1
- Orthogonal Group, O(n) : 𝑄 ∈ 𝐺𝐿 𝑛 𝑄𝑇𝑄 = 𝑄𝑄𝑇 = 𝐼}
• Lie Group : a group that is also a differentiable manifold
e.g.)
• Lie Algebra : the tangent space at the identity of Lie group
a vector space with Lie bracket operation [x, y]
- Lie bracket
Non-commutativeLie group
Lie algebra
Terry Taewoong Um ([email protected])7
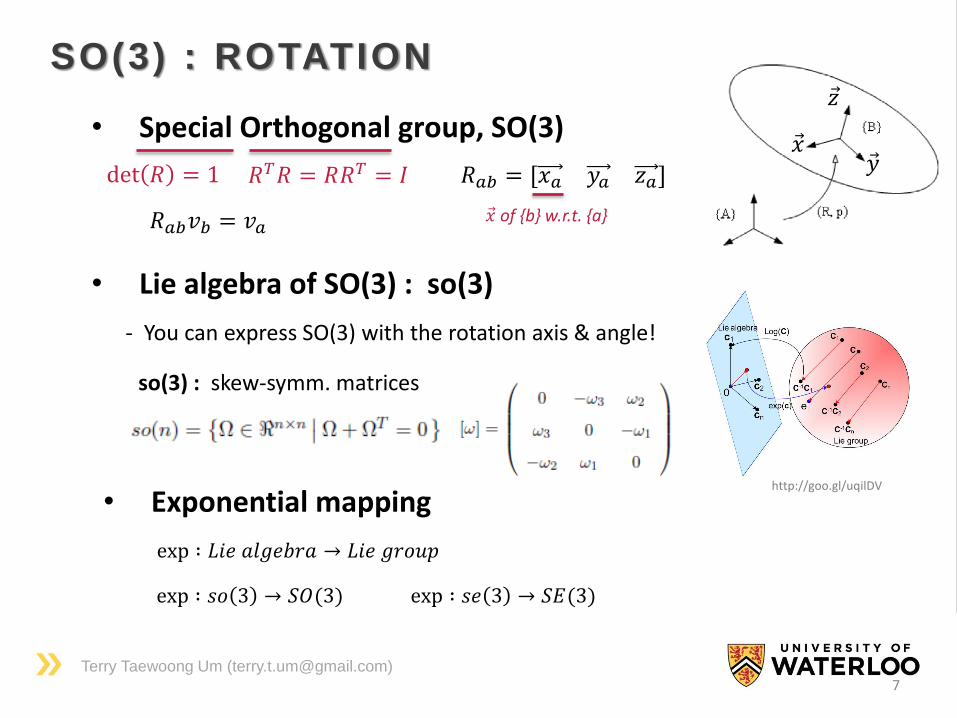
SO(3) : ROTATION
• Special Orthogonal group, SO(3)
𝑅𝑇𝑅 = 𝑅𝑅𝑇 = 𝐼det 𝑅 = 1
• Lie algebra of SO(3) : so(3)
𝑅𝑎𝑏 = [𝑥𝑎 𝑦𝑎 𝑧𝑎]
𝑥 𝑦
𝑧
𝑥 of {b} w.r.t. {a}
- You can express SO(3) with the rotation axis & angle!
http://goo.gl/uqilDV
so(3) : skew-symm. matrices
• Exponential mapping
exp ∶ 𝑠𝑜 3 → 𝑆𝑂(3) exp ∶ 𝑠𝑒 3 → 𝑆𝐸(3)
exp ∶ 𝐿𝑖𝑒 𝑎𝑙𝑔𝑒𝑏𝑟𝑎 → 𝐿𝑖𝑒 𝑔𝑟𝑜𝑢𝑝
𝑅𝑎𝑏𝑣𝑏 = 𝑣𝑎
Terry Taewoong Um ([email protected])8
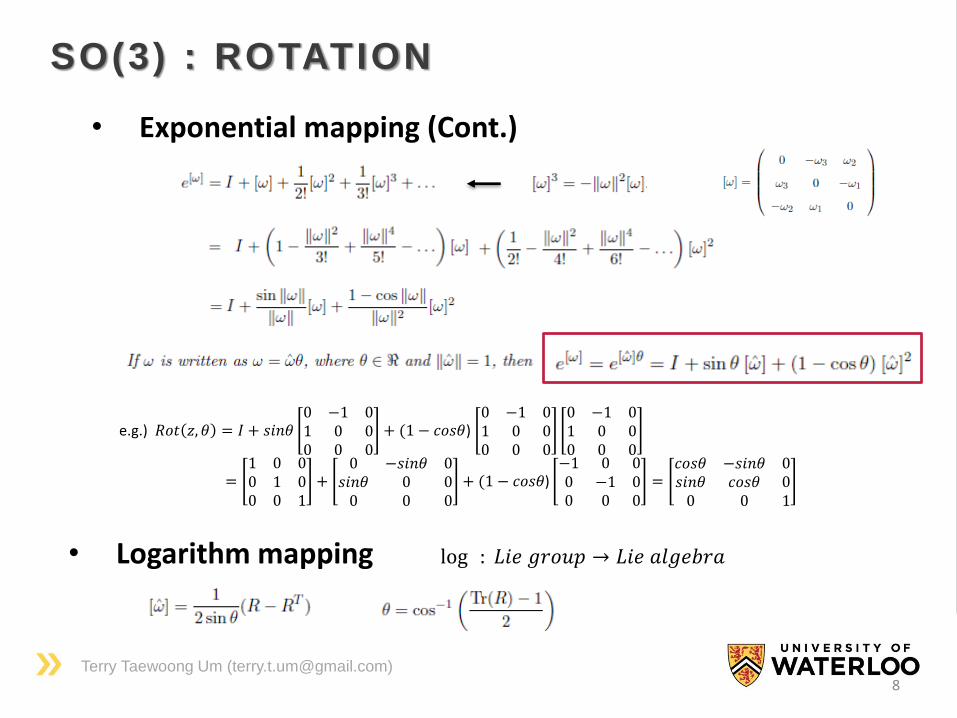
SO(3) : ROTATION
• Exponential mapping (Cont.)
e.g.) 𝑅𝑜𝑡 𝑧, 𝜃 = 𝐼 + 𝑠𝑖𝑛𝜃0 −1 01 0 00 0 0
+ (1 − 𝑐𝑜𝑠𝜃)0 −1 01 0 00 0 0
0 −1 01 0 00 0 0
=1 0 00 1 00 0 1
+0 −𝑠𝑖𝑛𝜃 0
𝑠𝑖𝑛𝜃 0 00 0 0
+ (1 − 𝑐𝑜𝑠𝜃)−1 0 00 −1 00 0 0
=𝑐𝑜𝑠𝜃 −𝑠𝑖𝑛𝜃 0𝑠𝑖𝑛𝜃 𝑐𝑜𝑠𝜃 00 0 1
• Logarithm mapping log : 𝐿𝑖𝑒 𝑔𝑟𝑜𝑢𝑝 → 𝐿𝑖𝑒 𝑎𝑙𝑔𝑒𝑏𝑟𝑎
Terry Taewoong Um ([email protected])9
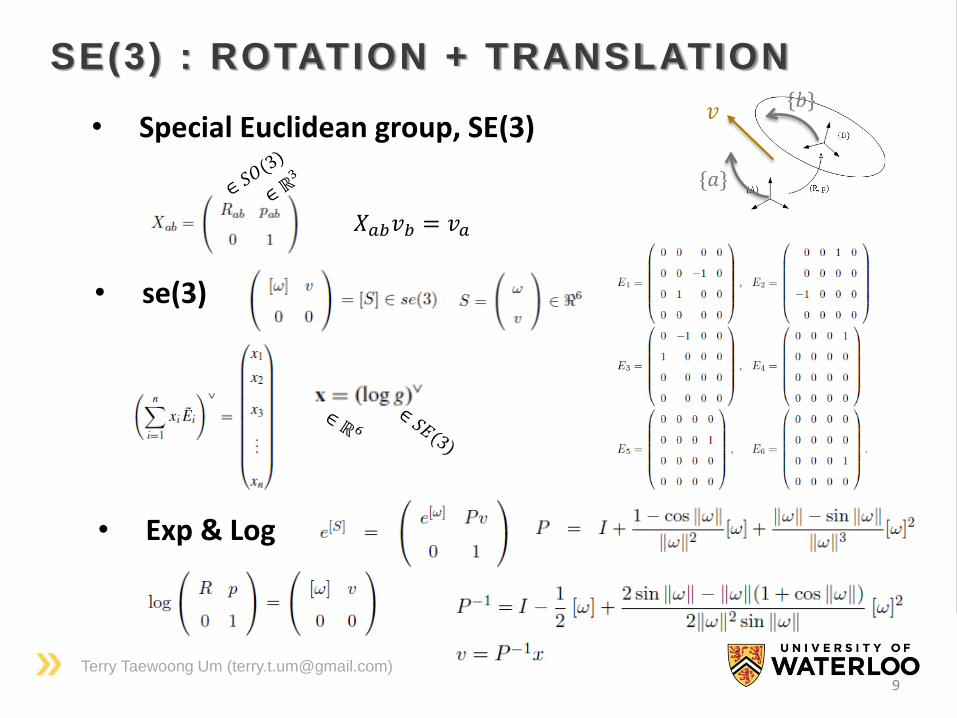
SE(3) : ROTATION + TRANSLATION
• Special Euclidean group, SE(3)
𝑋𝑎𝑏𝑣𝑏 = 𝑣𝑎
• Exp & Log
• se(3)
𝑣{𝑏}
{𝑎}
Terry Taewoong Um ([email protected])10
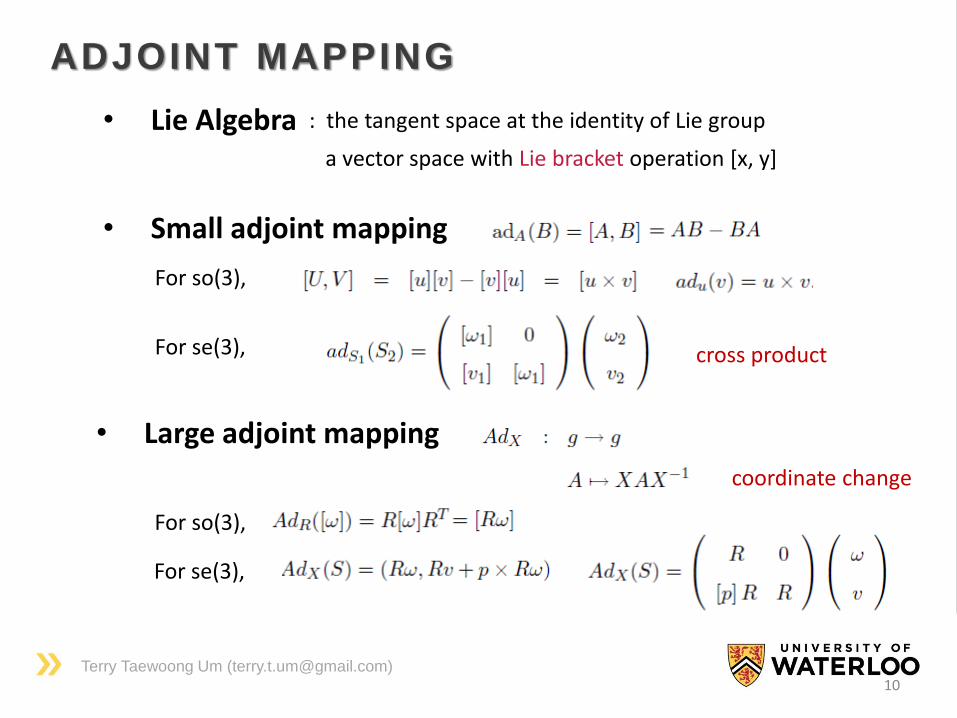
ADJOINT MAPPING
• Lie Algebra : the tangent space at the identity of Lie group
a vector space with Lie bracket operation [x, y]
• Small adjoint mapping
• Large adjoint mapping
cross product
For so(3),
For se(3),
For so(3),
For se(3),
coordinate change

Terry Taewoong Um ([email protected])12
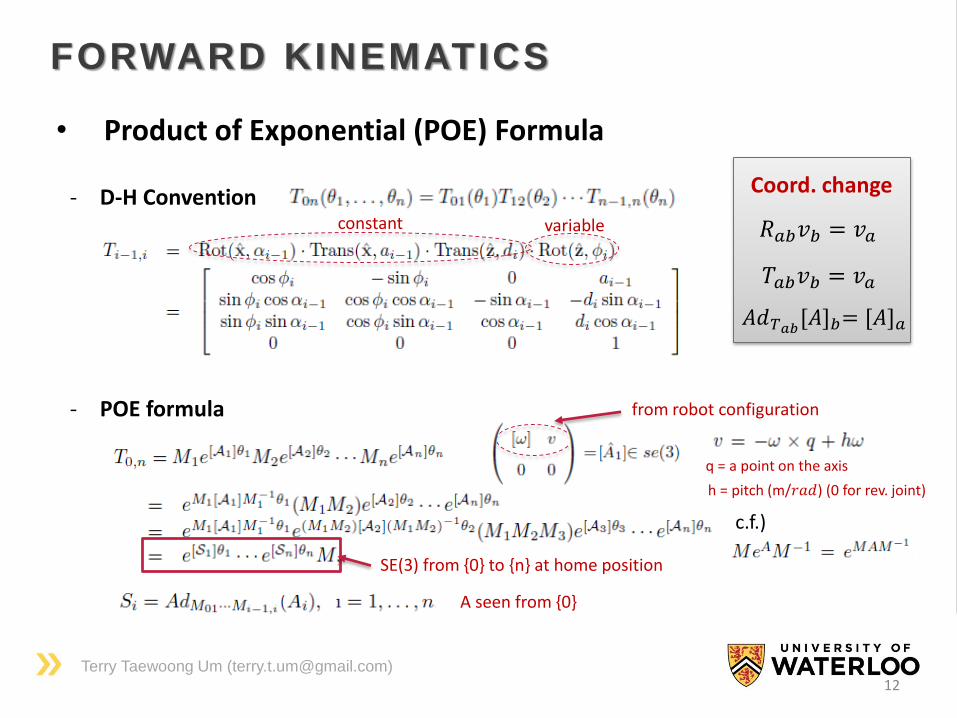
FORWARD KINEMATICS
• Product of Exponential (POE) Formula
- D-H Convention
- POE formula from robot configuration
h = pitch (m/𝑟𝑎𝑑) (0 for rev. joint)
q = a point on the axis
variableconstant
c.f.)
A seen from {0}
𝑅𝑎𝑏𝑣𝑏 = 𝑣𝑎
𝑇𝑎𝑏𝑣𝑏 = 𝑣𝑎
𝐴𝑑𝑇𝑎𝑏[𝐴]𝑏= [𝐴]𝑎
Coord. change
SE(3) from {0} to {n} at home position


Terry Taewoong Um ([email protected])14
DIFFERENTIAL KINEMATICS
• Angular velocity by rotational motionfrom space(fixed frame) to body
c.f.)
body velocity
𝝎/𝒗 : angular/linear velocity of the {body} attached to the body relative to the {space} but expressed @{body}
• Spatial velocity by screw motion
• Jacobian
From
𝜃 = 𝐽𝑠 𝜃
Terry Taewoong Um ([email protected])15
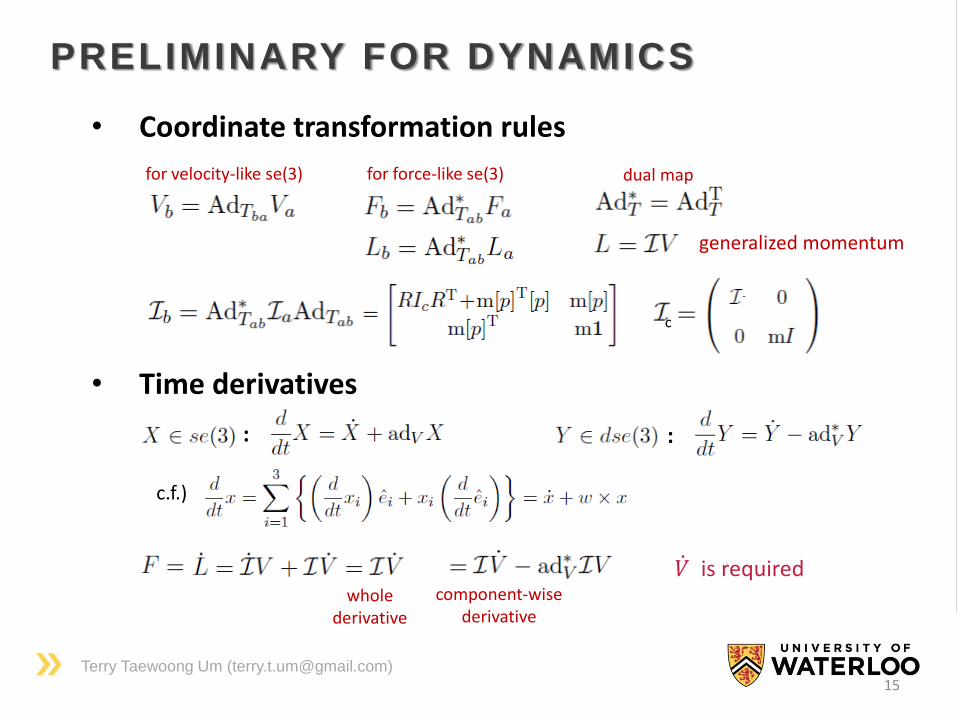
PRELIMINARY FOR DYNAMICS
• Coordinate transformation rules
for velocity-like se(3) for force-like se(3)
generalized momentum
dual map
c
• Time derivatives
: :
c.f.)
wholederivative
component-wisederivative
𝑉 is required
Terry Taewoong Um ([email protected])16
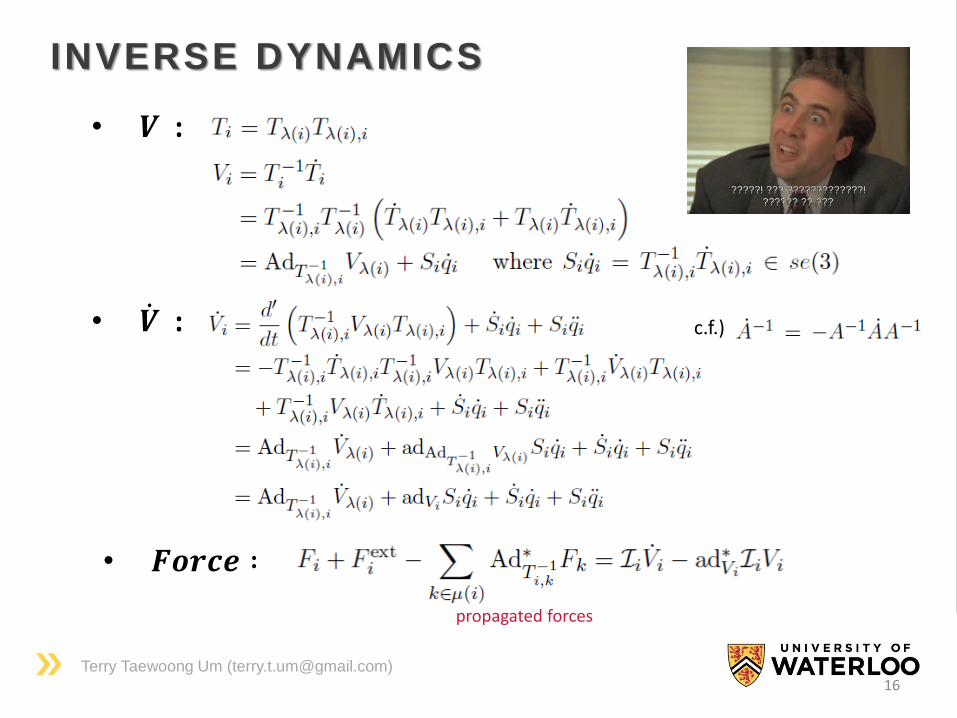
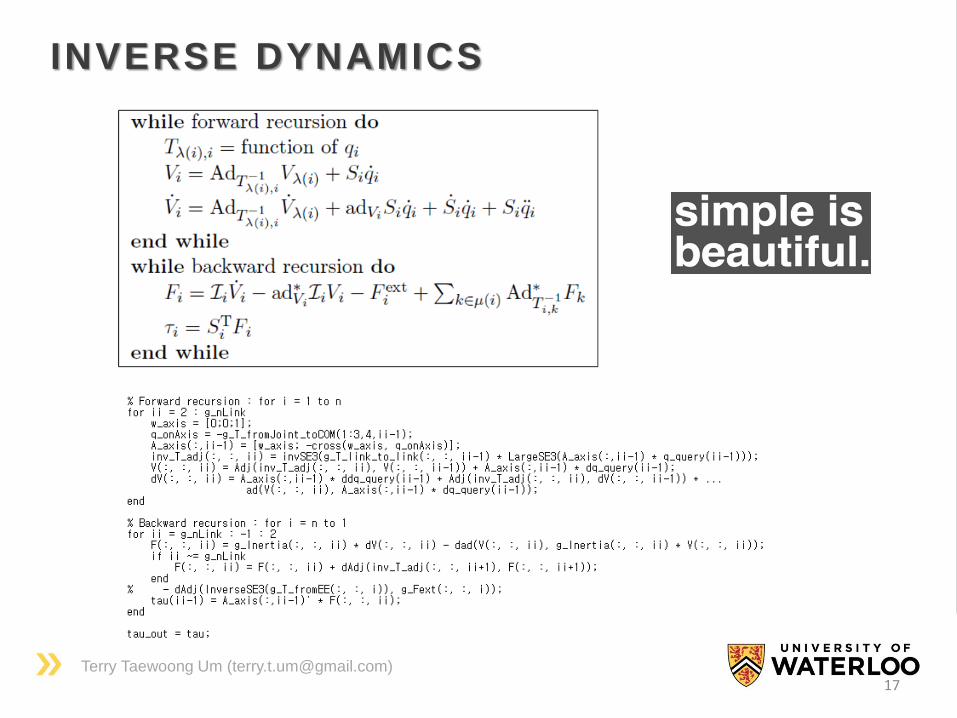
INVERSE DYNAMICS
• 𝑽 :
• 𝑽 : c.f.)
• 𝑭𝒐𝒓𝒄𝒆 ∶
propagated forces

Terry Taewoong Um ([email protected])19
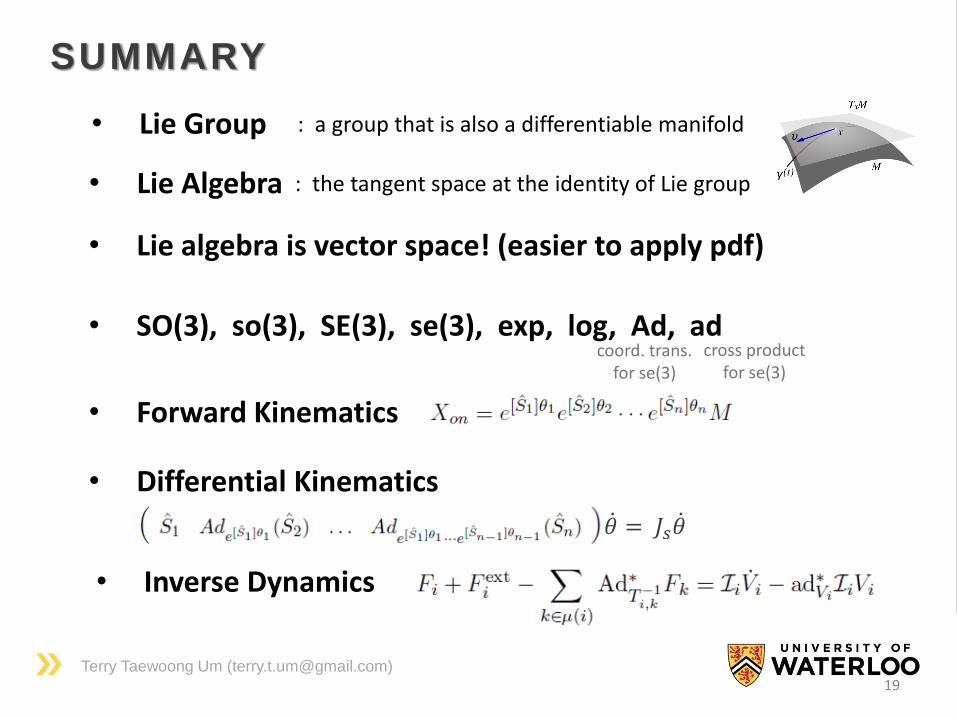
SUMMARY
• Lie Group : a group that is also a differentiable manifold
• Lie Algebra : the tangent space at the identity of Lie group
• SO(3), so(3), SE(3), se(3), exp, log, Ad, adcoord. trans.
for se(3)cross product
for se(3)
• Forward Kinematics
• Lie algebra is vector space! (easier to apply pdf)
• Inverse Dynamics
• Differential Kinematics 𝜃 = 𝐽𝑠 𝜃
Terry Taewoong Um ([email protected])20
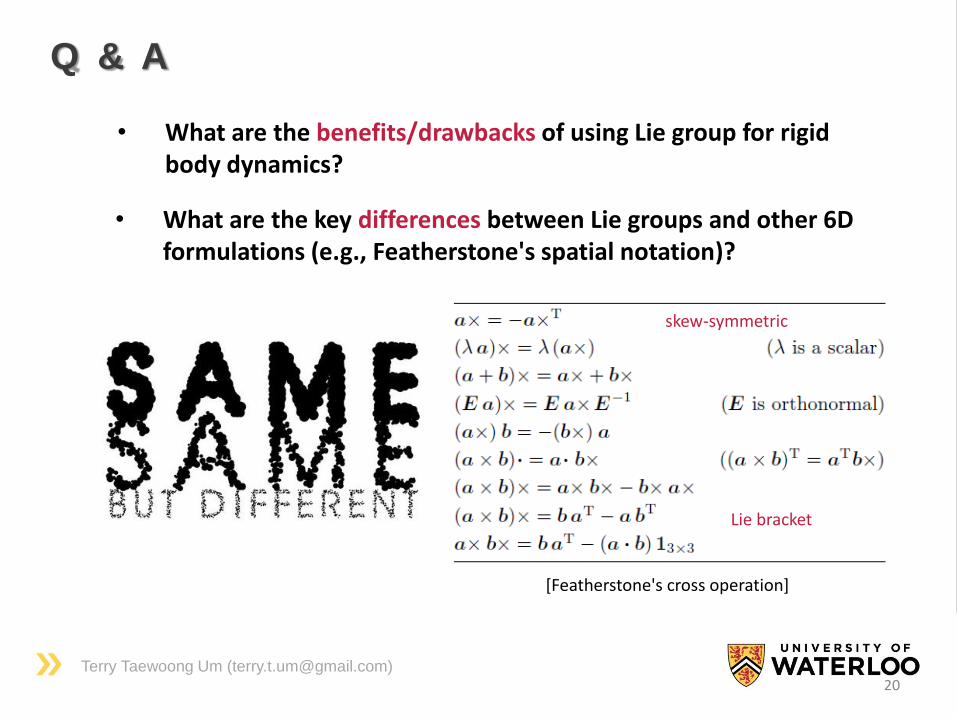
Q & A
• What are the benefits/drawbacks of using Lie group for rigid body dynamics?
• What are the key differences between Lie groups and other 6D formulations (e.g., Featherstone's spatial notation)?
[Featherstone's cross operation]
skew-symmetric
Lie bracket

Terry Taewoong Um ([email protected])22
Q & A
• Can you do a high-level overview of the mathematical details of the Wang’s paper (for those of us who got lost in the math)?
? - Convolution for Lie group (Chirikjian, 1998)
- Error propagation – 1st order (Wang and Chirikjian, 2006)
- Error propagation – 2nd order (Wang and Chirikjian, 2008)
