lecture abstract ee c128 / me c134 – feedback control...
TRANSCRIPT

EE C128 / ME C134 – Feedback Control SystemsLecture – Chapter 2 – Modeling in the Frequency Domain
Alexandre Bayen
Department of Electrical Engineering & Computer Science
University of California Berkeley
September 10, 2013
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 1 / 34
Lecture abstract
Topics covered in this presentation
I Laplace transform
I Transfer function
I Conversion between systems in time-, frequency-domain, and transferfunction representations
I Electrical, translational-, and rotational-mechanical systems in time-,frequency-domain, and transfer function representations
I Nonlinearities
I Linearization of nonlinear systems in time-, frequency-domain, andtransfer function representations
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 2 / 34
Chapter outline
1 2 Modeling in the frequency domain2.1 Introduction2.2 Laplace transform review2.3 The transfer function2.4 Electrical network transfer functions2.5 Translational mechanical system transfer functions2.6 Rotational mechanical system transfer functions2.7 Transfer functions for systems with gears2.8 Electromechanical system transfer functions2.9 Electric circuit analogs2.10 Nonlinearities2.11 Linearization
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 3 / 34
2 Modeling in the frequency domain 2.2 Laplace transform review
1 2 Modeling in the frequency domain2.1 Introduction2.2 Laplace transform review2.3 The transfer function2.4 Electrical network transfer functions2.5 Translational mechanical system transfer functions2.6 Rotational mechanical system transfer functions2.7 Transfer functions for systems with gears2.8 Electromechanical system transfer functions2.9 Electric circuit analogs2.10 Nonlinearities2.11 Linearization
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 4 / 34
2 Modeling in the frequency domain 2.2 Laplace transform review
History interlude
Pierre-Simon LaplaceI 1749 – 1827
I French mathematician andastronomer
I Pioneered the Laplace
transform
I AKA French Newton
I “...all the e↵ects of nature areonly mathematical results of asmall number of immutablelaws.”
I “What we know is little, andwhat we are ignorant of isimmense.”
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 5 / 34
2 Modeling in the frequency domain 2.2 Laplace transform review
The Laplace transform definitions, [1, p. 35]
Laplace transform
L[f(t)] = F (s) =
Z 1
0�f(t)e�st
dt
Inverse Laplace transform
L�1[F (s)] =1
2⇡j
Z�+j1
��j1F (s)estds
= f(t)u(t)
wheres = � + j!
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 6 / 34

2 Modeling in the frequency domain 2.2 Laplace transform review
Laplace transform table, [1, p. 36]
f(t) F (s)
�(t) 1
u(t)
1s
tu(t)
1s2
t
nu(t)
n!sn+1
e
�atu(t)
1s+a
sin(!t)u(t)
!s2+!2
cos(!t)u(t)
ss2+!2
e
�atsin(!t)u(t)
!(s+a)2+!2
e
�atcos(!t)u(t)
s+a(s+a)2+!2
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 7 / 34
2 Modeling in the frequency domain 2.2 Laplace transform review
Laplace transform theorems, [1, p. 37]
Some basic algebraic operations, such as multiplication by exponentialfunctions or shifts have simple counterparts in the Laplace domain
Theorem (Frequency shift)
L[e�at
f(t)] = F (s+ a)
Theorem (Time shift)
L[f(t� T )] = e
�sT
F (s)
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 8 / 34
2 Modeling in the frequency domain 2.2 Laplace transform review
Laplace transform theorems, [1, p. 37]
Theorem (Linearity)
L[c1
f
1
(t) + c
2
f
2
(t)] = c
1
F
1
(s) + c
2
F
2
(s)
Theorem (Scaling)
L[f(at)] = 1
a
F
�s
a
�
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 9 / 34
2 Modeling in the frequency domain 2.2 Laplace transform review
Laplace transform theorems, [1, p. 37]
Theorem (Di↵erentiation)
L ⇥d
nf
dt
n
⇤= s
n
F (s)�nX
k=1
s
n�k
d
k�1
f
dt
k�1
(0�)
Examples
L ⇥df
dt
⇤= sF (s)� f(0�)
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 10 / 34
2 Modeling in the frequency domain 2.2 Laplace transform review
Laplace transform theorems, [1, p. 37]
Theorem (Integration)
LhR
t
0� f(⌧)d⌧i=
F (s)
s
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 11 / 34
2 Modeling in the frequency domain 2.2 Laplace transform review
Laplace transform theorems, [1, p. 37]
Theorem (Final value)
L[f(1)] = lims!0
sF (s)
To yield correct finite results, all roots of the denominator of F (s) must
have negative real parts, and no more than one can be at the origin.
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 12 / 34

2 Modeling in the frequency domain 2.2 Laplace transform review
Laplace transform theorems, [1, p. 37]
Theorem (Initial value)
L[f(0+)] = lims!1
sF (s)
To be valid, f(t) must be continuous or have a step discontinuity at t = 0,i.e., no impulses or their derivatives at t = 0.
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 13 / 34
2 Modeling in the frequency domain 2.2 Laplace transform review
Partial fraction expansion, [1, p. 37]
To find the inverse Laplace transform of a complicated function, we canconvert the function to a sum of simpler terms for which we know theLaplace transform of each term
F (s) =N(s)
D(s)
How F (s) can be expanded is governed by the relative order betweenN(s) and D(s)
1. O(N(s)) < O(D(s))
2. O(N(s)) � O(D(s))
and the type of roots of D(s)
1. Real and distinct
2. Real and repeated
3. Complex or imaginary
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 14 / 34
2 Modeling in the frequency domain 2.3 The TF
1 2 Modeling in the frequency domain2.1 Introduction2.2 Laplace transform review2.3 The transfer function2.4 Electrical network transfer functions2.5 Translational mechanical system transfer functions2.6 Rotational mechanical system transfer functions2.7 Transfer functions for systems with gears2.8 Electromechanical system transfer functions2.9 Electric circuit analogs2.10 Nonlinearities2.11 Linearization
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 15 / 34
2 Modeling in the frequency domain 2.3 The TF
The transfer function, [1, p. 44]
General n-th order, linear, time-invariant di↵erential equation
a
n
d
n
c(t)
dt
n
+ a
n�1
d
n�1
c(t)
dt
n�1
+ ...+ a
0
c(t) =
b
m
d
m
r(t)
dt
m
+ b
m�1
d
m�1
r(t)
dt
m�1
+ ...+ b
0
r(t)
Under the assumption that all initial conditions are zero the transferfunction (TF) from input, c(t), to output, r(t), i.e., the ratio of the outputtransform, C(s), divided by the input transform, R(s) is given by
G(s) =C(s)
R(s)=
b
m
s
m + b
m�1
s
m�1 + ...+ b
0
a
n
s
n + a
n�1
s
n�1 + ...+ a
0
Also, the output transform, C(s) can be written as
C(s) = R(s)G(s)
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 16 / 34
2 Modeling in the frequency domain 2.4 Electrical network TFs
1 2 Modeling in the frequency domain2.1 Introduction2.2 Laplace transform review2.3 The transfer function2.4 Electrical network transfer functions2.5 Translational mechanical system transfer functions2.6 Rotational mechanical system transfer functions2.7 Transfer functions for systems with gears2.8 Electromechanical system transfer functions2.9 Electric circuit analogs2.10 Nonlinearities2.11 Linearization
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 17 / 34
2 Modeling in the frequency domain 2.4 Electrical network TFs
Electrical network TFs, [1, p. 47]
Table: Voltage-current, voltage-charge, and impedance relationships forcapacitors, resistors, and inductors
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 18 / 34

2 Modeling in the frequency domain 2.4 Electrical network TFs
Electrical network TFs, [1, p. 48]
Example(Resistor-inductor-capacitor (RLC)system)
IProblem: Find the TF relatingthe capacitor voltage, V
C
(s),to the input voltage, V (s)
ISolution: On board
Figure: RLC system
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 19 / 34
2 Modeling in the frequency domain 2.4 Electrical network TFs
Electrical network TFs, [1, p. 59]
Example (Inverting operationalamplifier system)
IProblem: Find the TF relatingthe output voltage, V
o
(s), tothe input voltage V
i
(s)
ISolution: On board
Figure: Inverting operational amplifiersystem
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 20 / 34
2 Modeling in the frequency domain 2.5 Translational mechanical system TFs
1 2 Modeling in the frequency domain2.1 Introduction2.2 Laplace transform review2.3 The transfer function2.4 Electrical network transfer functions2.5 Translational mechanical system transfer functions2.6 Rotational mechanical system transfer functions2.7 Transfer functions for systems with gears2.8 Electromechanical system transfer functions2.9 Electric circuit analogs2.10 Nonlinearities2.11 Linearization
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 21 / 34
2 Modeling in the frequency domain 2.5 Translational mechanical system TFs
Translational mechanical system TFs, [1, p. 61]
Table: Force-velocity, force-displacement, and impedance translationalrelationships for springs, viscous dampers, and mass
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 22 / 34
2 Modeling in the frequency domain 2.5 Translational mechanical system TFs
Translational mechanical system TFs, [1, p. 63]
Example (Translationalinertia-spring-damper system)
IProblem: Find the TF relatingthe position, X(s), to theinput force, F (s)
ISolution: On board
Figure: Physical system; block diagram
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 23 / 34
2 Modeling in the frequency domain 2.6 Rotational mechanical system TFs
1 2 Modeling in the frequency domain2.1 Introduction2.2 Laplace transform review2.3 The transfer function2.4 Electrical network transfer functions2.5 Translational mechanical system transfer functions2.6 Rotational mechanical system transfer functions2.7 Transfer functions for systems with gears2.8 Electromechanical system transfer functions2.9 Electric circuit analogs2.10 Nonlinearities2.11 Linearization
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 24 / 34
2 Modeling in the frequency domain 2.6 Rotational mechanical system TFs
Rotational mechanical system TFs, [1, p. 69]
Table: Torque-angular velocity, torque-angular displacement, and impedancerotational relationships for springs, viscous dampers, and inertia
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 25 / 34
2 Modeling in the frequency domain 2.6 Rotational mechanical system TFs
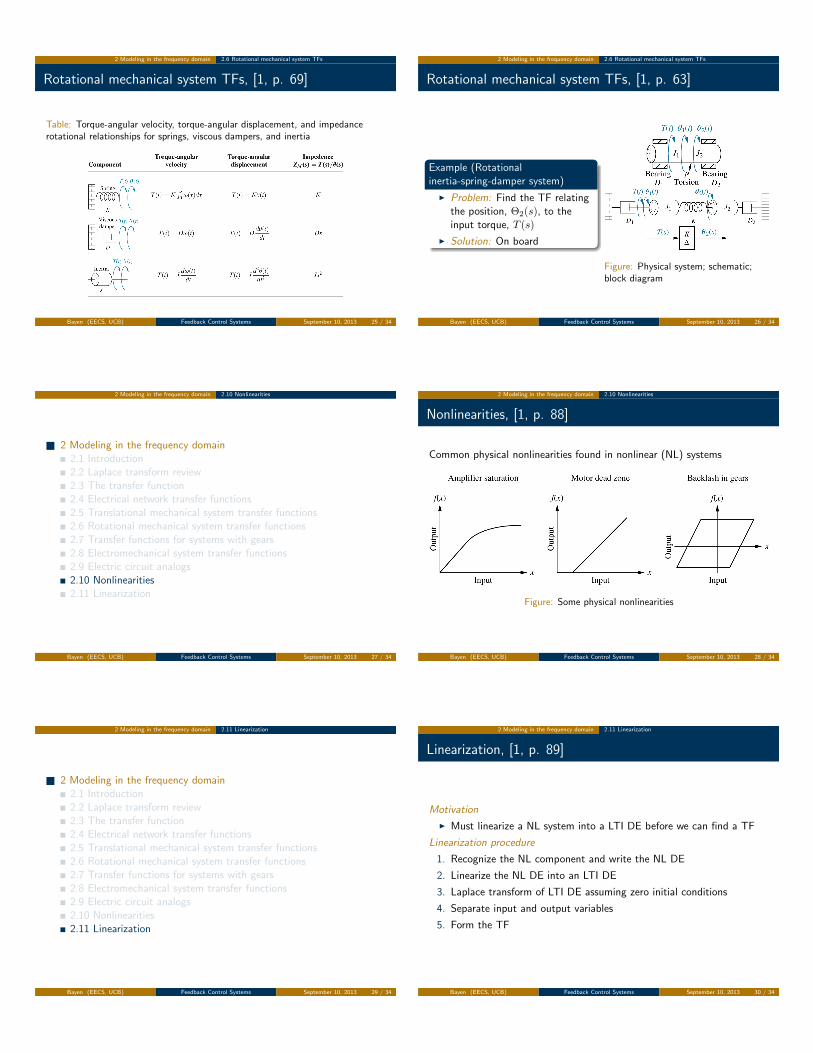
Rotational mechanical system TFs, [1, p. 63]
Example (Rotationalinertia-spring-damper system)
IProblem: Find the TF relatingthe position, ⇥
2
(s), to theinput torque, T (s)
ISolution: On board
Figure: Physical system; schematic;block diagram
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 26 / 34
2 Modeling in the frequency domain 2.10 Nonlinearities
1 2 Modeling in the frequency domain2.1 Introduction2.2 Laplace transform review2.3 The transfer function2.4 Electrical network transfer functions2.5 Translational mechanical system transfer functions2.6 Rotational mechanical system transfer functions2.7 Transfer functions for systems with gears2.8 Electromechanical system transfer functions2.9 Electric circuit analogs2.10 Nonlinearities2.11 Linearization
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 27 / 34
2 Modeling in the frequency domain 2.10 Nonlinearities
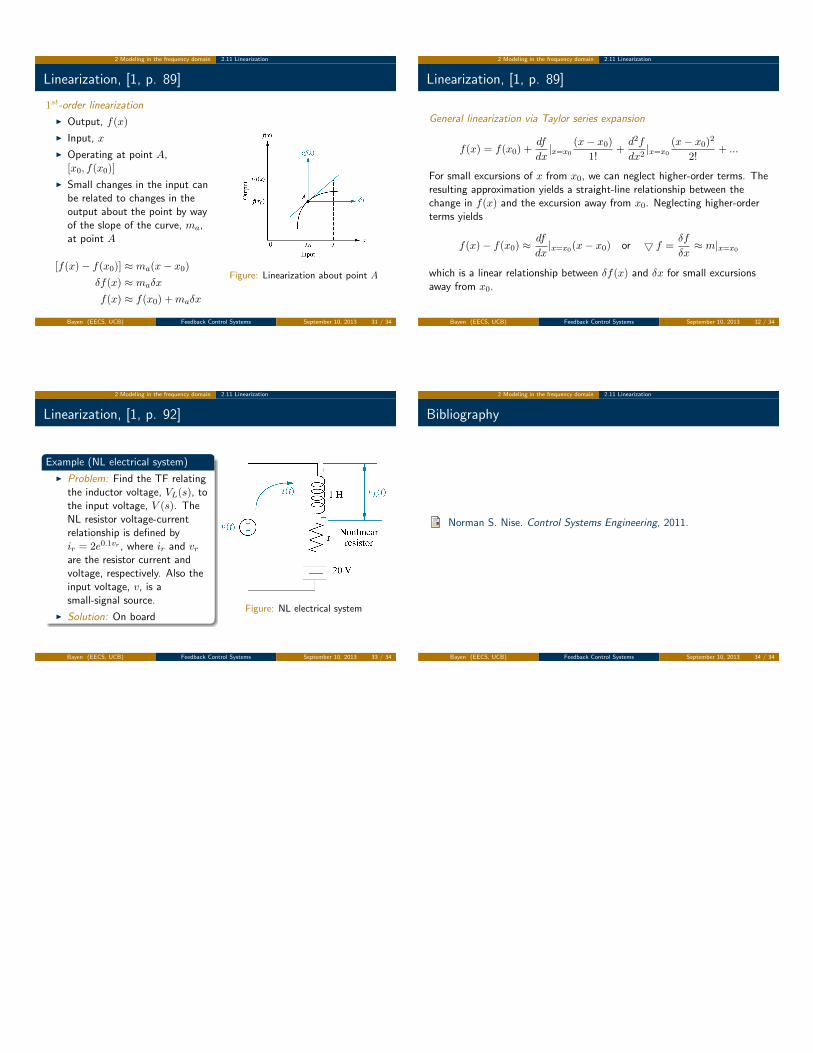
Nonlinearities, [1, p. 88]
Common physical nonlinearities found in nonlinear (NL) systems
Figure: Some physical nonlinearities
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 28 / 34
2 Modeling in the frequency domain 2.11 Linearization
1 2 Modeling in the frequency domain2.1 Introduction2.2 Laplace transform review2.3 The transfer function2.4 Electrical network transfer functions2.5 Translational mechanical system transfer functions2.6 Rotational mechanical system transfer functions2.7 Transfer functions for systems with gears2.8 Electromechanical system transfer functions2.9 Electric circuit analogs2.10 Nonlinearities2.11 Linearization
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 29 / 34
2 Modeling in the frequency domain 2.11 Linearization
Linearization, [1, p. 89]
Motivation
I Must linearize a NL system into a LTI DE before we can find a TF
Linearization procedure
1. Recognize the NL component and write the NL DE
2. Linearize the NL DE into an LTI DE
3. Laplace transform of LTI DE assuming zero initial conditions
4. Separate input and output variables
5. Form the TF
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 30 / 34
2 Modeling in the frequency domain 2.11 Linearization
Linearization, [1, p. 89]
1st-order linearization
I Output, f(x)
I Input, x
I Operating at point A,[x
0
, f(x0
)]
I Small changes in the input canbe related to changes in theoutput about the point by wayof the slope of the curve, m
a
,at point A
[f(x)� f(x0
)] ⇡ m
a
(x� x
0
)
�f(x) ⇡ m
a
�x
f(x) ⇡ f(x0
) +m
a
�x
Figure: Linearization about point A
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 31 / 34
2 Modeling in the frequency domain 2.11 Linearization
Linearization, [1, p. 89]
General linearization via Taylor series expansion
f(x) = f(x0
) +df
dx
|x=x0
(x� x
0
)
1!+
d
2
f
dx
2
|x=x0
(x� x
0
)2
2!+ ...
For small excursions of x from x
0
, we can neglect higher-order terms. Theresulting approximation yields a straight-line relationship between thechange in f(x) and the excursion away from x
0
. Neglecting higher-orderterms yields
f(x)� f(x0
) ⇡ df
dx
|x=x0(x� x
0
) or 5 f =�f
�x
⇡ m|x=x0
which is a linear relationship between �f(x) and �x for small excursionsaway from x
0
.
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 32 / 34
2 Modeling in the frequency domain 2.11 Linearization
Linearization, [1, p. 92]
Example (NL electrical system)
IProblem: Find the TF relatingthe inductor voltage, V
L
(s), tothe input voltage, V (s). TheNL resistor voltage-currentrelationship is defined byi
r
= 2e0.1vr , where i
r
and v
r
are the resistor current andvoltage, respectively. Also theinput voltage, v, is asmall-signal source.
ISolution: On board
Figure: NL electrical system
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 33 / 34
2 Modeling in the frequency domain 2.11 Linearization
Bibliography
Norman S. Nise. Control Systems Engineering, 2011.
Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 34 / 34