lecture 7 (linear motors ii) - overhead
TRANSCRIPT
8/10/2019 Lecture 7 (Linear Motors II) - Overhead
http://slidepdf.com/reader/full/lecture-7-linear-motors-ii-overhead 1/8
University of British Columbia Elec Machines & Electronics
EECE 365 – Winter 2013 Lecture 7: Linear Machines II
Nathan Ozog © 2013 Page 1 of 8
Linear Machines
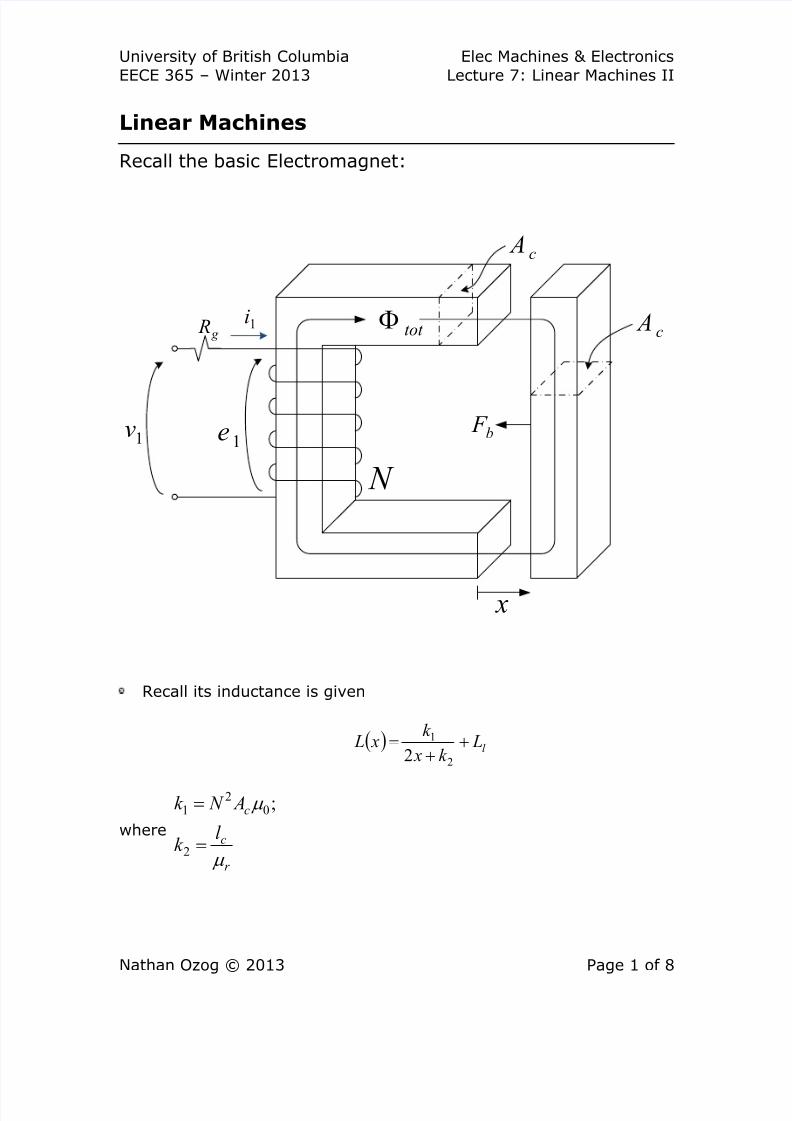
Recall the basic Electromagnet:
Recall its inductance is given
( ) l Lk x
k x L +
+=
2
1
2
where
r
c
c
l k
A N k
µ
µ
=
=
2
02
1 ;
1i
1e
N
g R
x
c A
b F
tot Φ
1v
c A
8/10/2019 Lecture 7 (Linear Motors II) - Overhead
http://slidepdf.com/reader/full/lecture-7-linear-motors-ii-overhead 2/8
University of British Columbia Elec Machines & Electronics
EECE 365 – Winter 2013 Lecture 7: Linear Machines II
Nathan Ozog © 2013 Page 2 of 8
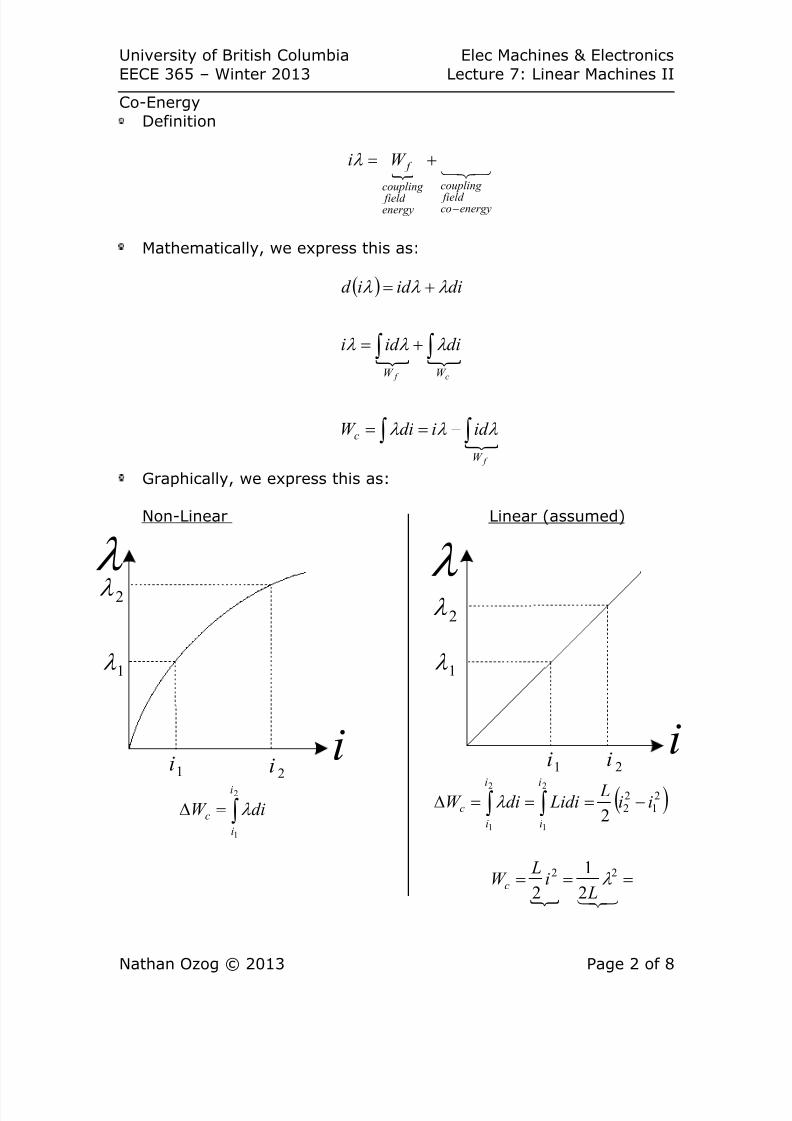
Co-Energy
Definition
{ 321
energyco field
coupling
energy field
coupling
f W i
−
+=λ
Mathematically, we express this as:
( )
{ {
{
f
c f
W
c
W W
id idiW
diid i
diid id
∫∫
∫∫
−==
+=
+=
λ λ λ
λ λ λ
λ λ λ
Graphically, we express this as:
Non-Linear Linear (assumed)
λ
i
2λ
1λ
1i
2i
∫=∆2
1
i
i
c diW λ ( )2
1
2
22
2
1
2
1
ii L
LididiW i
i
i
i
c −===∆ ∫∫λ
{
===321
22
2
1
2λ L
i L
W c
λ
i
2λ
1λ
1i 2i

8/10/2019 Lecture 7 (Linear Motors II) - Overhead
http://slidepdf.com/reader/full/lecture-7-linear-motors-ii-overhead 3/8
University of British Columbia Elec Machines & Electronics
EECE 365 – Winter 2013 Lecture 7: Linear Machines II
Nathan Ozog © 2013 Page 3 of 8
For a linear system, energy and co-energy will be equal
They are often both simply referred to as “energy”
Recalling our system, we note that the relationship between current andflux in the magnet changes with the position
i.e. ( ) xih ,=λ
The co-energy in the magnet is also “ ”It does not depend on the of flux or current, only on their
present state and relationship
the equation for change in co-energy in the magnet is:
( )( )
( )( )
−=∆ ∫∫ab xi
a
xi
bc di xidi xiW 00
,, λ λ
- -
( )a xih ,
( )b xih ,

8/10/2019 Lecture 7 (Linear Motors II) - Overhead
http://slidepdf.com/reader/full/lecture-7-linear-motors-ii-overhead 4/8
University of British Columbia Elec Machines & Electronics
EECE 365 – Winter 2013 Lecture 7: Linear Machines II
Nathan Ozog © 2013 Page 4 of 8
This time, we consider the force on the bar when current is held constant
i.e. aii =
f
t
t
x
x
W iedt fdxb
a
b
a
∆−= ∫∫
dt
d e
λ = , because flux will change
so, there is addition of electrical energy as the bar moves
f
t
t
x
x
W iedt fdxb
a
b
a
∆−= ∫∫
Consider the change in electrical energy graphically
Position a Position b

8/10/2019 Lecture 7 (Linear Motors II) - Overhead
http://slidepdf.com/reader/full/lecture-7-linear-motors-ii-overhead 5/8
University of British Columbia Elec Machines & Electronics
EECE 365 – Winter 2013 Lecture 7: Linear Machines II
Nathan Ozog © 2013 Page 5 of 8
The total change is:
Mathematically, we have
( )=−====∆ ∫∫∫ ab
t
t
t
t
e id idt dt
d iiedt W
b
a
b
a
b
a
λ λ λ λ
λ
λ
A subtle note:Current and flux are not functions of each-other in this equation

8/10/2019 Lecture 7 (Linear Motors II) - Overhead
http://slidepdf.com/reader/full/lecture-7-linear-motors-ii-overhead 6/8
University of British Columbia Elec Machines & Electronics
EECE 365 – Winter 2013 Lecture 7: Linear Machines II
Nathan Ozog © 2013 Page 6 of 8
Next consider the energy in the coupling field
We again have
( ) ( )
−=∆ ∫∫
ab xi xi
f id id W
,
0
,
0
λ λ
λ λ
Graphically:
Position a Position b
( ) ( )
=
−=∆ ∫∫ab xi xi
f id id W
,
0
,
0
λ λ
λ λ

8/10/2019 Lecture 7 (Linear Motors II) - Overhead
http://slidepdf.com/reader/full/lecture-7-linear-motors-ii-overhead 7/8
University of British Columbia Elec Machines & Electronics
EECE 365 – Winter 2013 Lecture 7: Linear Machines II
Nathan Ozog © 2013 Page 7 of 8
( ) ( )
c
x
x
AD
xi
BC
xi
ABCD
t
t
x
x
f em
W fdx
id id iedt fdx
W W W
b
a
abb
a
b
a
∆=
−−=
∆−∆=∆
∫
∫∫∫∫321321321
0
,
0
0
,
0
λ λ
λ λ
Remember that ∫= diW c λ
So
( ) ( )
( ) ( )[ ]∫
∫∫
−=
−=∆
a
aa
i
ab
i
a
i
bc
di xi L xi Li
dii xdii xW
0
00
,,
,, λ λ

8/10/2019 Lecture 7 (Linear Motors II) - Overhead
http://slidepdf.com/reader/full/lecture-7-linear-motors-ii-overhead 8/8
University of British Columbia Elec Machines & Electronics
EECE 365 – Winter 2013 Lecture 7: Linear Machines II
Nathan Ozog © 2013 Page 8 of 8
The equations are converse to what we had when aλ λ =
This time we have in place of and
in place of
This will give the result ( )aiic
xiW d fdx=
= ,
Leads to ( )= x f
Again, assume our linear relationship ( ) ( ) l L x L x L +==,λ
( ) ( ) ( )
+
+===
= l aa
iic Lk x
k i
dx
d x L
i
dx
d xiW
dx
d x f
a2
1
22
222,
( )( )22
12
2 k x
k i x f a
+−==
( )( )22
12
2 k x
k i x f a
+−=
( ) ( )aii
xiW dx
d x f c
== ,