lecture 3 - cs department - home
TRANSCRIPT

Lecture 3
Displacement Models (contd)
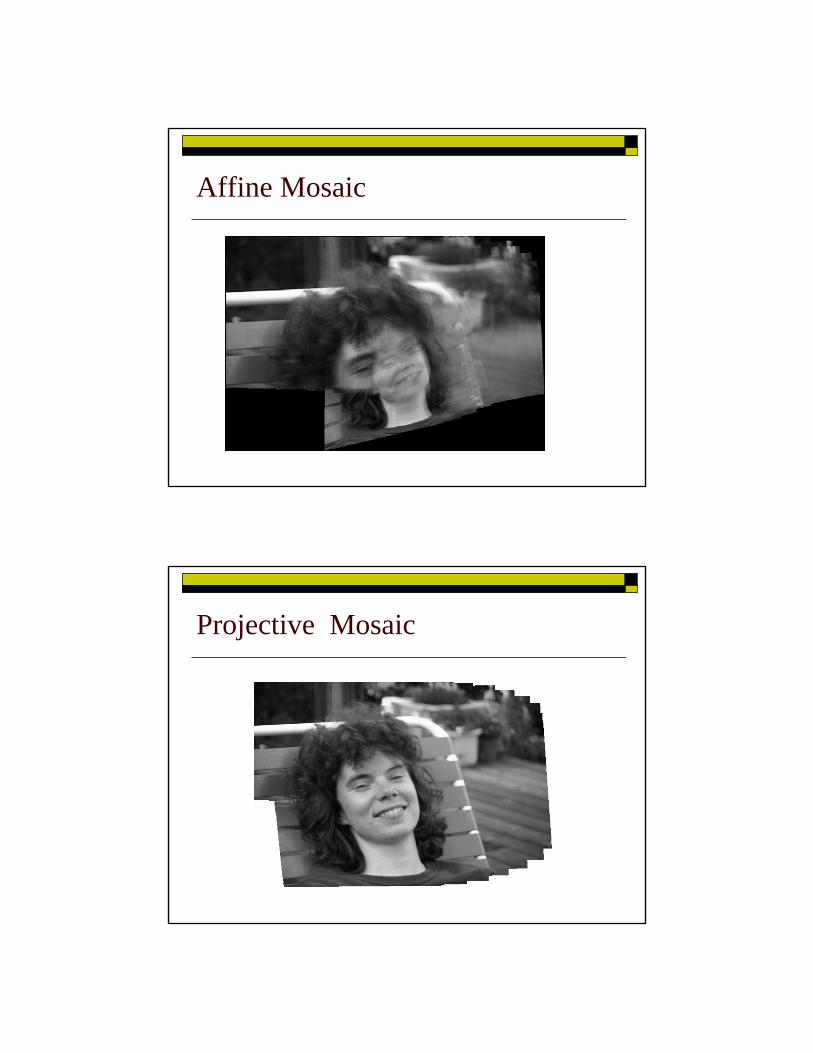
Affine Mosaic
Projective Mosaic

Instantaneous Velocity Model
3-D Rigid Motion
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
−=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
′′′
Z
Y
X
TTT
ZYX
ZYX
11
1
γβγαβα
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
−=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−′−′−′
Z
Y
X
TTT
ZYX
ZZYYXX
00
0
γβγαβα
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
′′′
Z
Y
X
TTT
ZYX
ZYX
100010001
00
0
γβγαβα
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΩΩ−Ω−ΩΩΩ−
=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
3
2
1
12
13
23
00
0
VVV
ZYX
ZYX
&
&
&
321
213
132
VXYZ
VZXY
VYZX
+Ω−Ω=
+Ω−Ω=
+Ω−Ω=
&
&
&

3-D Rigid Motion
321
213
132
VXYZ
VZXY
VYZX
+Ω−Ω=
+Ω−Ω=
+Ω−Ω=
&
&
&
VXX +×Ω=&
Cross Product
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΩΩΩ
=Ω
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
3
2
1
,ZYX
X
Orthographic Projection
(u,v) is optical flow213
132
321
213
132
VZxyvVyZxu
VXYZ
VZXY
VYZX
+Ω−Ω==+Ω−Ω==
+Ω−Ω=
+Ω−Ω=
+Ω−Ω=
&
&
&
&
&
XxYy
==

Plane+orthographic(Affine)
cYbXaZ ++=
14
133
122
322
21
211
Ω−=Ω−Ω=Ω−=
Ω−Ω=Ω=
Ω+=
caba
aVb
caba
aVb
bAxu +=
ZxVvyZVu
132
321
Ω−Ω+=Ω−Ω+=
yaxabvyaxabu
432
211
++=++=(1) Show this
Perspective Projection (arbitrary flow)
ZfYy
ZfXx
=
=
ZZy
ZYf
ZZfYYfZyv
ZZx
ZXf
ZZfXXfZ
xu
&&&&&
&&&&&
−=−
==
−=−
==
2
2
212331
2
2213
32
1
)(
)(
yf
xyf
yZVx
ZVfv
xf
xyf
yxZV
ZVfu
Ω−
Ω+−Ω+Ω−=
Ω+
Ω−Ω−−Ω+=
321
213
132
VXYZ
VZXY
VYZX
+Ω−Ω=
+Ω−Ω=
+Ω−Ω=
&
&
&

Plane+Perspective (pseudo perspective)
yacx
ab
aZ
cYbXaZ
−−=
++=11
u fVZ
VZ
x yf
xyf
x
v fVZ
xVZ
yf
xyf
y
= + − − − +
= − + − + −
( )
( )
12
33
1 2 2
21 3
3 2 1 2
Ω ΩΩ Ω
Ω ΩΩ Ω
254876
52
4321
yaxyayaxaav
xyaxayaxaau
++++=
++++=(2) Show this
3D Scenes
When the scene is neither planar not distant, the relation between two consecutive frames is described by the fundamental matrix.
What the heck is epipolar geometry?

Epipolar Geometry
Epipolar GeometryCoplanar Condition
(B – A) . A x B = 0
M'= R (M – T)
(M – T) T . T x M = 0R-1 = RT
(RT M')T .T x M = 0A x B = S.B therefore M' T R S M = 0
M'T E M = 0 where E =RS is the essential matrixa1

Slide 14
a1 The Essential Matrix is the mapping between points and epipolar linessubail, 10/9/2001

Vector Cross Product to Matrix-vector multiplication
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
−=
=×
00
0
.
xy
xz
yz
BBBB
BBS
SABA
Camera Model Revisited: Perspective
ZfYy
ZfXx
ZYX
ff
Ch
=
=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
1000000
Origin at the lensImage plane in front of the lens
MmPPMm=
=−1

Epipolar GeometryThe Fundamental Matrix is the Essential Matrix described inpixel coordinates.
m and m' are the points in pixel coordinates corresponding to m and m'
M = P-1 m and M'= P'-1 m'
m = f/Z . M and m'= f'/Z’ M'
M'T E M = 0 m'T F m = 0
(P'-1m')T E (P-1 m) = m'T P' -T E P-1 m
Epipolar Geometry
LeftLeftcameracamera
RightRightcameracamera
Left cameraLeft cameraimage planeimage plane
Right cameraRight cameraimage planeimage plane
3D World
Defined for two static camerasDefined for two static cameras

P
Cl Cr
T
xl xr
eler
Epipolar Geometry
EpipolarEpipolar line:line: set of world set of world points that project to same points that project to same point in left image, when point in left image, when projected to right image projected to right image forms a line.forms a line.
EpipolarEpipolar plane:plane: plane plane defined by the camera defined by the camera centers and world point.centers and world point.
EpipoleEpipole:: intersection of image intersection of image plane with line connecting plane with line connecting camera centerscamera centers
Essential MatrixP
Cl Cr
T
xl xr
eler
( )TPRP −= lr
( ) 0=×− Τll PTTP
CoplanarityCoplanarity constraint between vectors (constraint between vectors (PPll--TT), ), TT, , PPll..
0=Τlr ΕPP
essential matrixessential matrix
Pl Pr
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−
−
00
0
xy
xz
yz
TTTT
TT
0=Τlr PSRP

Fundamental Matrix
lll TR += PP
rrr TR += PP
( )TPRP −= lr Τ= lrRRR
rl TT Τ−= RT(A)(A)
(B)(B)
lll M Px =
rrr M Px =
0=Τlr ΕPP
( ) 01 =−Τ−Τllrr EMM xx
0=Τlr Fxx
fundamental matrixfundamental matrix
P
Cl Cr
T
xl xr
eler
PlPr
relative rotation
relative translation
Fundamental Matrix
Rank 2 matrix (due to S)Given a point in left camera x, epipolar line in right camera is: ur=Fx
0'' =⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛= ΤΤ xxxx
mhgfedcba
F

Fundamental Matrix
3x3 matrix with 9 componentsRank 2 matrix (due to S)7 degrees of freedomGiven a point in left camera x, epipolar line in right camera is: ur=Fx
0=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛= ΤΤ
rlrl
mhgfedcba
F xxxx
Fundamental Matrix
Longuet Higgins (1981)Hartley (1992)Faugeras (1992)Zhang (1995)

Fundamental matrix captures the relationship between the corresponding points in two views.
Fundamental Matrix
,011 333231
232221
131211
=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡′′
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
i
iT
i
i
yx
fffffffff
yx
0)()()(
,01
333231232221131211
333231
232221
131211
=+′+′++′+′++′+′
=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
+′+′+′+′+′+′
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
fyfxffyfxfyfyfxfx
fyfxffyfxffyfxf
yx
iiiii
i
i
iT
i
i
To solve the equation, the rank(M) must be 8.
0)()()( 333231232221131211 =+′+′++′+′++′+′ fyfxffyfxfyfyfxfx iiiii
0333231232221131211 =+′+′+′+′′+′++′+′ ffyfxfyfyxfxyfxfyxfxx iiiiiiii
0
1
11
1
222222222222
111111111111
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
′′′′′′
′′′′′′′′′′′′
= f
yxyyyxyxyxxx
yxyyyxyxyxxxyxyyyxyxyxxx
Mf
nnnnnnnnnnn
MMMMMMMMM
Fundamental Matrix

Computation of Fundamental Matrix
Normalized 8-point algorithm
Objective:Compute fundamental matrix F such that
AlgorithmNormalize the image by and
Find centroid of points in each image, determine the range, and normalize all points between 0 and 1
Linear solution determining the eigen vector corresponding to the smallest eigen value of A,
0=′ ii Fxx
ii Txx =ˆ ii T xx ′′=′ˆ
01ˆˆˆˆˆˆˆˆˆˆˆˆ...........................1ˆˆˆˆˆˆˆˆˆˆˆˆ
888888888888
111111111111
=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
′′′′′′′
′′′′′′
= fyxyyyxyxyxxx
yxyyyxyxyxxxAf

Normalized 8-point algorithm Construct
Normalize
Constraint enforcement SVD decomposition
Rank enforcement
De-normalization:(3) Show this
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
987
654
321
ˆ
fffffffff
F
||ˆ||/ˆˆ FFF =
VUF ′⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
3
2
1
000000
ˆ
σσ
σ
)( 321 σσσ ≥≥
VUF ′⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
0000000
~2
1
σσ )0( 3 =σ
TFTF T ~′=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
1000
0
yy
xx
dada
T

Robust Fundamental Matrix Estimation (by Zhang)
Uniformly divide the image into 8×8 grid.Randomly select 8 grid cells and pick one pair of corresponding points from each grid cell, then use Hartley’s 8-point algorithm to compute Fundamental Matrix Fi. For each Fi, compute the median of the squared residuals Ri.
Ri = mediank[d(p1k,Fip2k) + d(p2k,F’ip1k)]Select the best Fi according to Ri.Determine outliers if Rk>Th.Using the remaining points compute the fundamental Matrix F by weighted least square method.
Results

Results
Homework Due 1/23/2008
Show (1), (2) and (3).
Experiment with five different opencvroutines.