lect waves & oscillation 1442893777696
DESCRIPTION
fakdfakjdfhkTRANSCRIPT

Waves and Oscillations
Syllabus:
Simple harmonic motion, Damped simple harmonic
motion, types of damping, Forced oscillation, resonance,
group velocity and dispersion, Types of waves, Energy
Transport in Wave motion, Wave motion in one Transport in Wave motion, Wave motion in one
dimension, the one dimensional Wave equation.
Objective: Illustrate the physics involved in the description and
analysis of waves through a wide range of examples, from purely
mechanical and purely electromagnetic to coupled electro-
mechanical waves, such as plasma oscillations and hydromagnetic
waves.

Lecture Plan
• Introduction
• Types of wave
• Oscillating Properties of waves
• Wave equation
• Simple Harmonic Motion
• Damped oscillation
• Forced oscillation

Introduction:
• Water waves have two
features common to all
waves:
1. A wave is a traveling
disturbance.
2. A wave carries energy from
place to place.

Two basic types of waves,
transverse and
longitudinal.
A transverse wave is one
in which the disturbance
occurs perpendicular to
Types of waves
4
occurs perpendicular to
the direction of travel of
the wave.
Radio waves, light waves, and microwaves are transverse waves.
Transverse waves also travel on the strings of instruments such as
guitars and banjos.

Types of waves
5
A longitudinal wave is one in which the disturbance occurs
parallel to the line of travel of the wave.
A sound wave is a longitudinal wave.

Sound Waves result from periodic oscillations of air
molecules, which collide with their neighbours and
create a disturbance which moves at the speed of sound.

7
Some waves are neither transverse nor longitudinal.
A water wave is neither transverse nor longitudinal, since water
particles at the surface move clockwise on nearly circular paths as
the wave moves from left to right.

Periodic Waves
8
The transverse and longitudinal waves that we have been discussing are
called periodic waves because they consist of cycles or patterns that are
produced over and over again by the source.

Oscillating Properties
• Each day we encounter many kinds of oscillatory motion, such as
swinging pendulum of a clock, a person bouncing on a trampoline,
a vibrating guitar string, and a mass on a spring.
• They have common properties:
Amplitude A is the
maximum excursion of amaximum excursion of a
particle of the medium
from the particle’s
undisturbed position.
Wavelength is the horizontal length of one cycle of the wave.

Period T is the time required for the wave to travel a distance of
one wavelength. The period T is related to the frequency f
λλ
fT
v ==
Tf
1=
Oscillating Properties
10
These fundamental relations apply to longitudinal as well as to
transverse waves.
λfT
v ==
No matter what the direction of the displacement, the force
always acts in a direction to restore the system to its
equilibrium position. Such a force is called a “restoring force”.
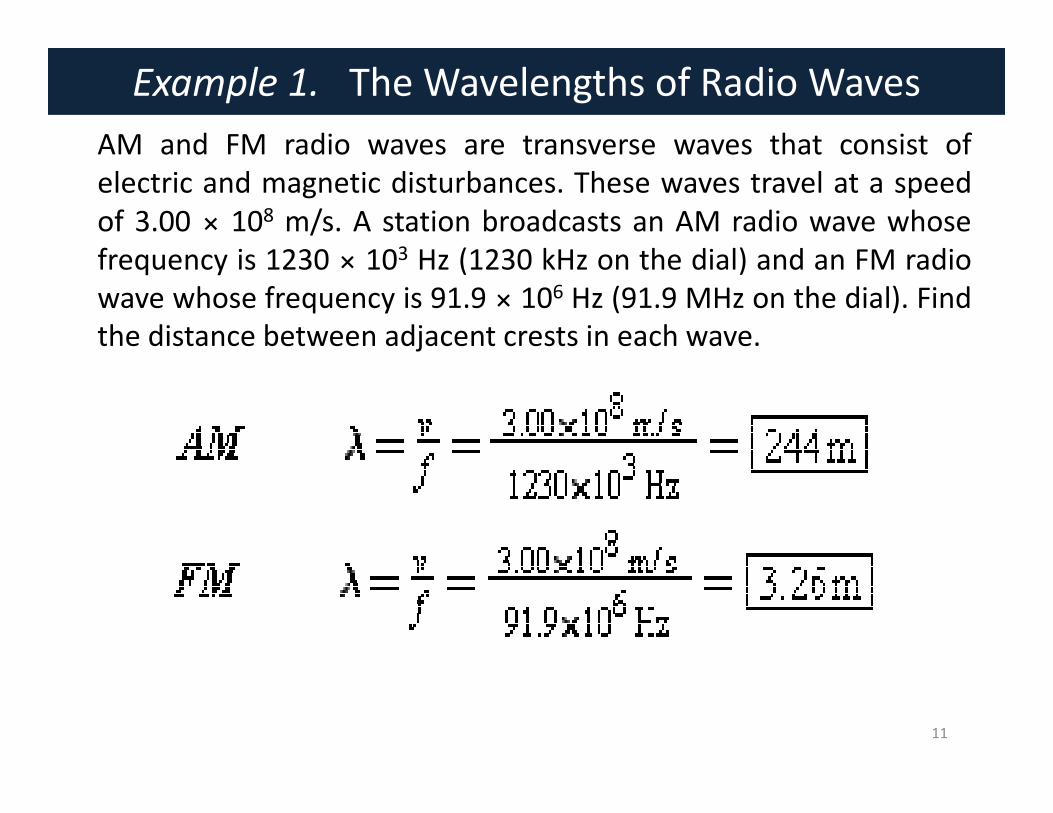
Example 1. The Wavelengths of Radio Waves
AM and FM radio waves are transverse waves that consist of
electric and magnetic disturbances. These waves travel at a speed
of 3.00 × 108 m/s. A station broadcasts an AM radio wave whose
frequency is 1230 × 103 Hz (1230 kHz on the dial) and an FM radio
wave whose frequency is 91.9 × 106 Hz (91.9 MHz on the dial). Find
the distance between adjacent crests in each wave.
11

The simple harmonic oscillator and its motion
1. Simple harmonic motion; is a form of periodic motion of a particle, etc., in which the acceleration is always directed towards some equilibrium point and is proportional to the displacement from this point,
This motion can be described in terms of sinesine andand cosinecosinefunctionsfunctions

The simple harmonic oscillator and its motion
The point P is rotating in the anticlockwise direction on the
circumference of a circle of radius a, with uniform angular velocity ω.
The foot of the perpendicular on any one of the diameters executes
simple harmonic motion. P0 is the position of the point at t = 0.

The simple harmonic oscillator and its motion
At t = 0, the point P is at P′ and therefore, the initial phase is θ.

How to understand ?φ)cos( ϕω += tax
π0=ϕx
x
tx − 图图图图
2
πϕ =
πϕ =Tt
mx
omx−

How to compare the phases of two SHOs with
same ?
)cos(111
ϕω += txx m
)cos( 222 ϕω += txx m
)()(12
ϕωϕωϕ +−+=∆ tt
12ϕϕϕ −=∆
ω
{
0=∆ϕ
x
to
x
to
ϕ∆
t
x
o
π±=∆ϕ

1 2 3 4 5 6
t
0.5
1
xHtL
2 4 6 8
t
0.5
1
xHtL a
Fig 17-6 shows several simple harmonic motions.
(a) (b)
(c) same: ,
different:
-1
-0.5
-1
-0.5
1 2 3 4 5 6
t
-1
-0.5
0.5
1
xHtL(c) (a) same: ,
different:
mx
φω
(b) same: ,
different:
mx
φω
mx φω

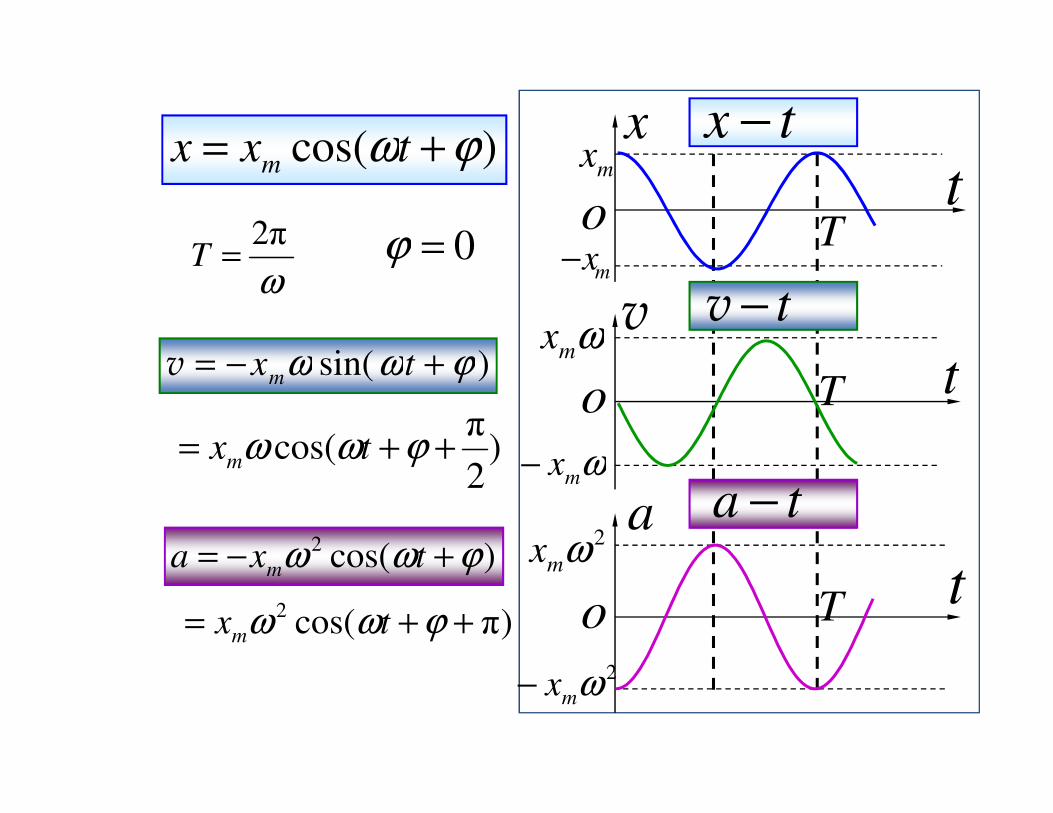
Displacement
Velocity
)cos( φω += txx m
)sin( φωω +−== txdt
dxv mx
)2
cos( φπ
ωω ++= txm
Displacement, velocity, and acceleration
Acceleration
• When the displacement is a maximum in eitherdirection, the speed is zero, because the velocitymust now change its direction.
)cos(2
2
2
φωω +−== txdt
xda mx
2
)cos(2 φπωω ++= txm
tx −
t−v
T
ωmx
x
v
t
t
mx
mx−o
o T
)cos( ϕω += txx m
0=ϕω
π2=T
π
)sin( ϕωω +−= txmv
ta −ωmx−
2ωmx
2ωmx−
a
to
o T
T
)2
πcos( ++= ϕωω txm
)πcos(2 ++= ϕωω txm
)cos(2 ϕωω +−= txa m

a body of mass m that slides on a frictionless horizontal surface. The
body moves in x direction.
origin is chosen at here
kxFx −=∑ 2
2
dt
xdax =
2
2
dt
xdmkx =−
02
2
=+ xm
k
dt
xd
This equation is called the “equation of motion of the simpleharmonic oscillator”. It is the basis of many complex oscillatorproblems.
Rewrite Equation of SHM as;
(1)xm
k
dt
xd)(
2
2
−=
3. Find the solution of Eq
We write a tentative solution to Eq(1) as
(2)
xmdt
)(2
−=
)cos( φω += txx m

We differentiate Eq(2) twice with respect to the Time.
Putting this into Eq(1) we obtain
)cos(2
2
2
φωω +−= txdt
xdm
)cos()cos(2 φωφωω +−=+− tx
m
ktx mm
Therefore, if we choose the constant such that
(3)
It is in fact a solution of the equation of motion of a simple harmonic oscillator.
m
m
k=2ω
ω

Energy in simple harmonic motion
1.The potential energy
2.The kinetic energy0.8
1
)(cos2
1
2
1 222 φω +== tkxkxU m
U(t)
0=φ
2.The kinetic energy
1 2 3 4 5 6
0.2
0.4
0.6
0.8
K(t)
T/2 T)(sin2
1
)(sin2
1
2
1
22
2222
φω
φωω
+=
+==
tkx
txmmvK
m
m
)sin( ϕωω +−= txmv

• both potential and kinetic energies oscillate with
time t and vary between zero and maximum value
of .
• Both U and K vary with twice the frequency of the
displacement and velocity.
3. The total mechanical energy E is
2
2
1mkx
21mkxUKE =+= (17-14)
2mkxUKE =+= (17-14)
mxmx−
K(x)
U(x)
x
Fig 17-8 (b)
2
2
1)( kxxU =
)()( xUExK −=
E

At the maximum displacement .
At the equilibrium position, .
can be written quite generally as
2
2
1mkxK =
2
2
1mkxU =0=K
0=U
222
2
1
2
1
2
1mx kxkxmvUK =+=+
k)(
222xx
m
kv mx −=
)(22
xxm
kv mx −±=
then
or
Website link for further information:
http://hyperphysics.phy-astr.gsu.edu/hbase/shm.html

In Fig 1, m=2.43kg, k=221N/m, the block is stretched inthe positive x direction a distance of 11.6 cm fromequilibrium and released. Take time t=0 when theblock is released, the horizontal surface is frictionless.
(a) What is the total energy?
xm
o•
Fig 1Example-1
(a) What is the total energy?
(b) What is the maximum speed of the block?
(c) What is the maximum acceleration?
(d) What is the position, velocity, and acceleration
at t=0.215s?

Solution:
(a)
(b)
(c) The maximum acceleration occurs just at the instant
JmmNkxE m 49.1)116.0)(/221(2
1
2
1 22===
smkg
J
m
E
m
Kv /11.1
43.2
)49.1(222 max
max====
(c) The maximum acceleration occurs just at the instant
of release, when the force is greatest
(d)
2max
max /6.1043.2
)116.0)(/221(sm
kg
mmN
m
kx
m
Fa m ====
sradm
k/9536.0==ω

Since at t=0, then
So at t=0.215s
)cos()( φω += txtx m
mxx m 116.0== 0=φ
)536.9cos(116.0cos)( ttxtx m == ω
msx 0535.0)215.0)(536.9cos(116.0 −==
{msx 0535.0)215.0)(536.9cos(116.0 −==
smtxv mx /981.0sin −=−= ωω
222/87.4)0535.0()/536.9( smmsradxax =−−=−= ω
{

Lecture Plan
• Home work;
• Example of Simple Harmonic motion
• Simple Pendulum
• Vibration of mass by two stretched
springssprings
• Vibrations of stretched string.
• Damped oscillation.

Damped harmonic motion
• Up to this point we have assumed that nofrictional force act on the system.
• This loss in amplitude is called “damping” andthe motion is called “damped harmonicmotion”.
Liquid exerts a damping force opposed to the
motion��
bvFd −=
b = damping constant (kg/s)
Assumption:
• Gravitational force on block is negligible compared to the damping
force and the force on the block from the spring.
• Damping force is to be proportional to the velocity of the particle.
• No damping force acts when particle is at rest.
1 2 3 4 5 6
-1
-0.5
0.5
1
1
1.5
x t
(a)
1 2 3 4 5 6
-1.5
-1
-0.5
0.5
x t
(b)
τt
e−
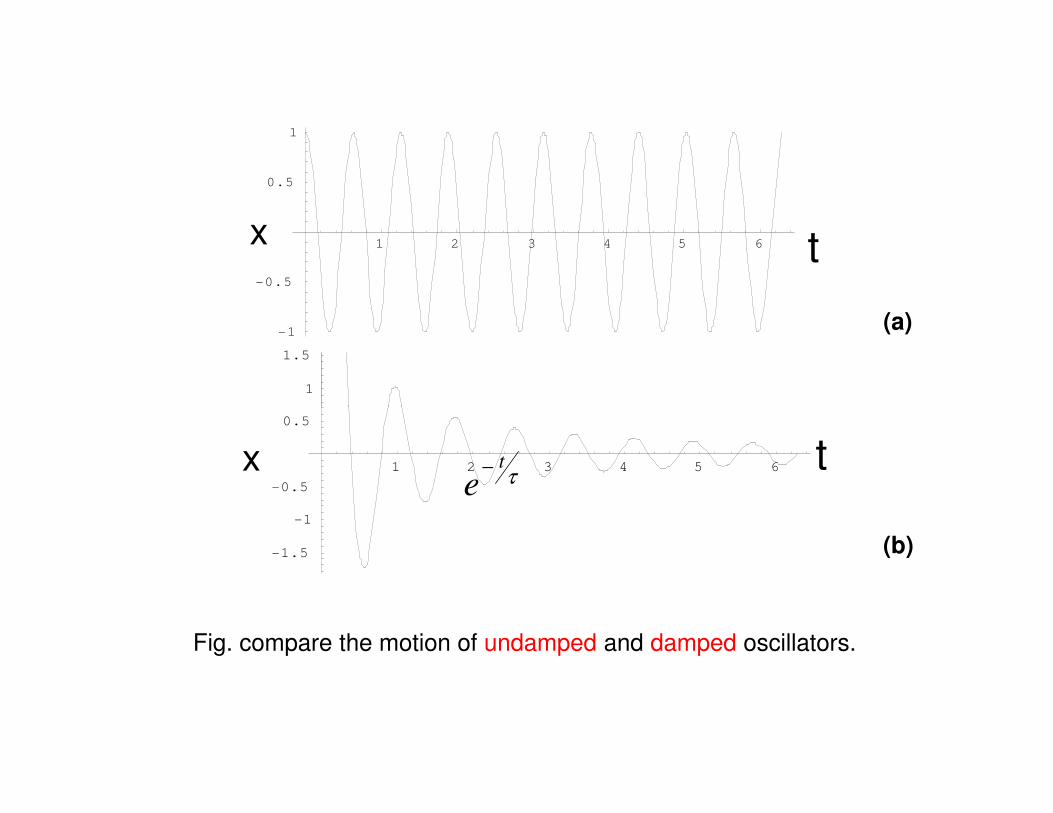
Fig. compare the motion of undamped and damped oscillators.
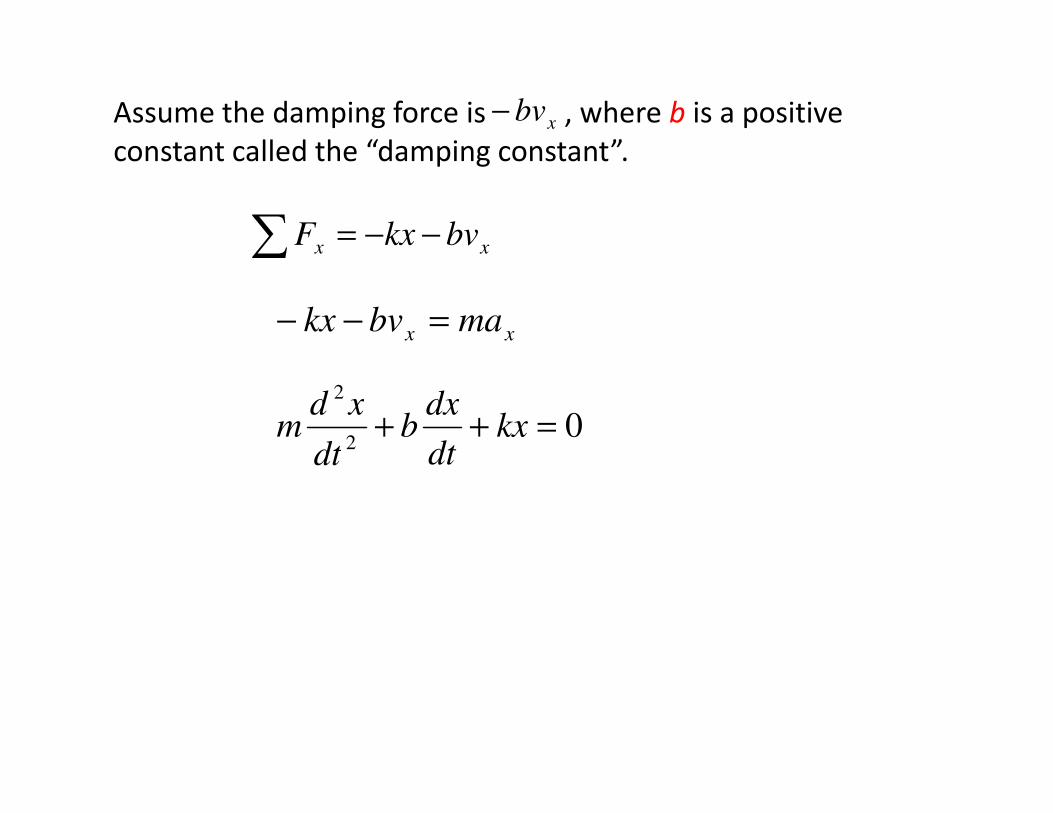
Assume the damping force is , where b is a positive
constant called the “damping constant”.
xx mabvkx =−−
02
=++ kxdx
bxd
m
xx bvkxF −−=∑
xbv−
02
=++ kxdt
dxb
dt
xdm
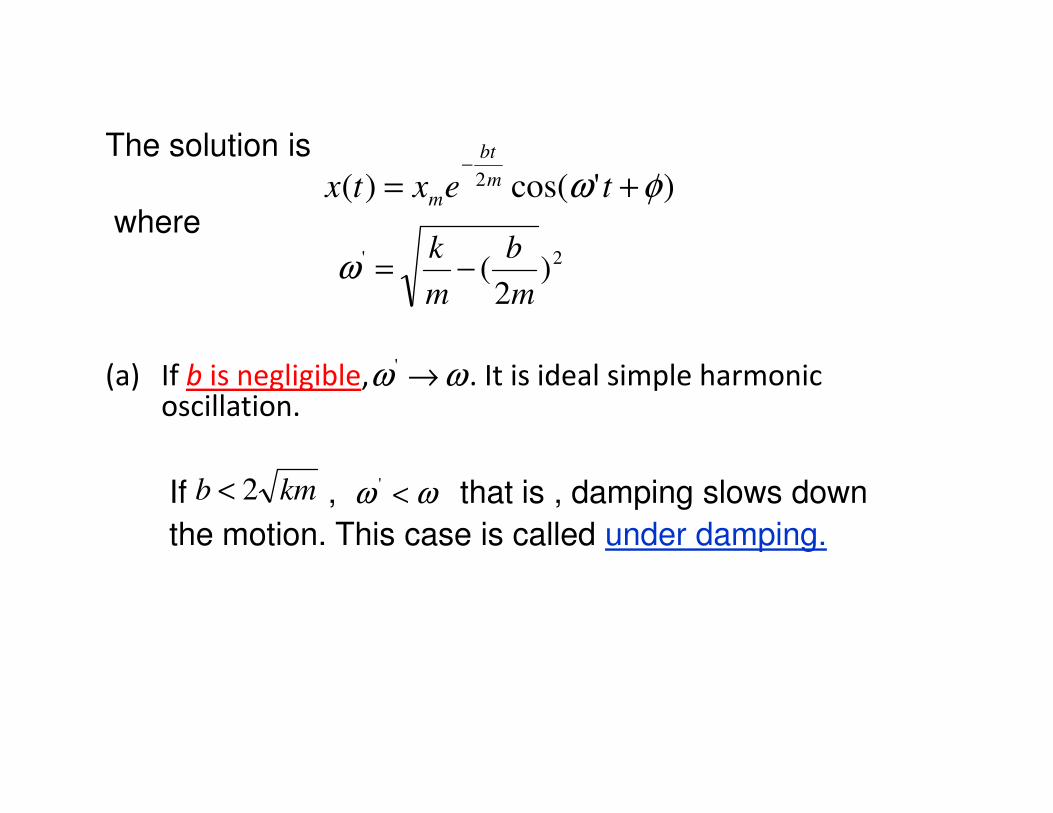
The solution is
where
(a) If b is negligible, . It is ideal simple harmonic oscillation.
)'cos()( 2 φω +=−
textx m
bt
m
2')
2(
m
b
m
k−=ω
ωω →'
oscillation.
If , that is , damping slows down
the motion. This case is called under damping.
kmb 2< ωω <'

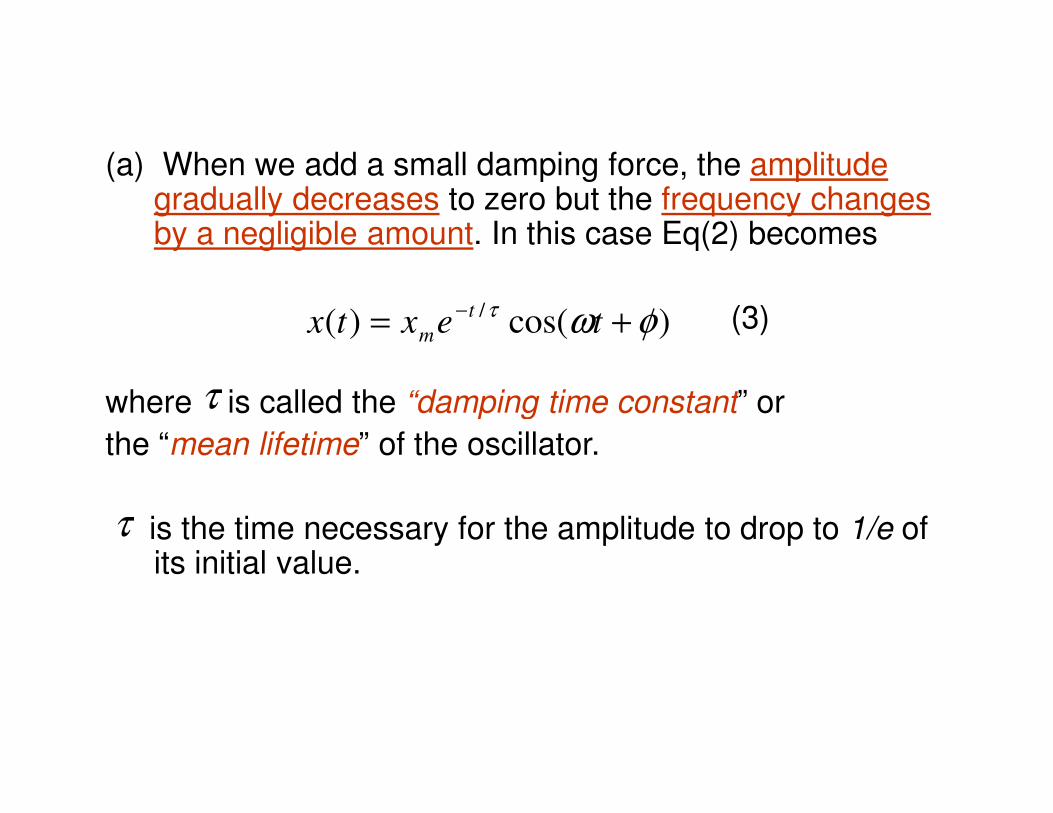
(a) When we add a small damping force, the amplitude gradually decreases to zero but the frequency changes by a negligible amount. In this case Eq(2) becomes
(3)
where is called the “damping time constant” or
)cos()(/ φωτ += −
textxt
m
τwhere is called the “damping time constant” or
the “mean lifetime” of the oscillator.
is the time necessary for the amplitude to drop to 1/e of its initial value.
τ
τ

(b) When the damping force is not large, the mechanism energy is
shows that the mechanical energy of the oscillator decreases exponentially with time.
τ/22
2
1)(
t
m ekxtE−=
The energy decreases twice as rapidly as the amplitude.
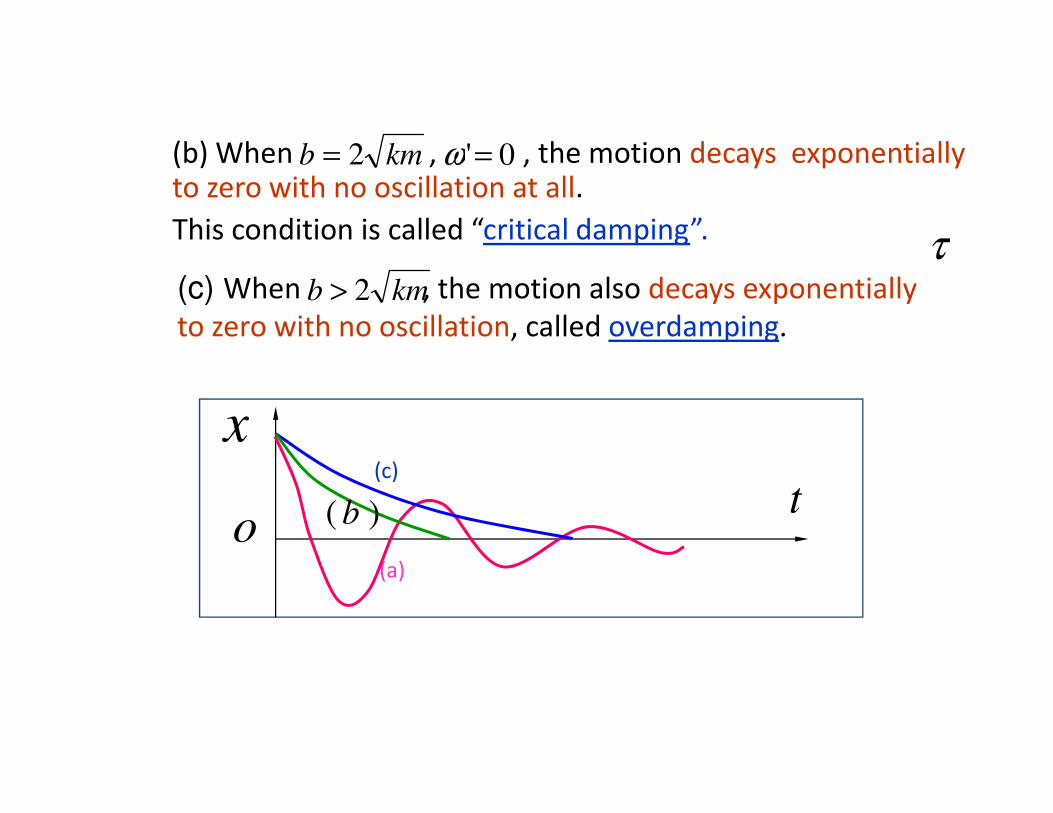
(b) When , , the motion decays exponentially to zero with no oscillation at all.
This condition is called “critical damping”.
kmb 2=
τ
0'=ω
x
(c) When , the motion also decays exponentially
to zero with no oscillation, called overdamping.
kmb 2>
ot
x
)( b
(a)
(c)

Examples:
1) Person swinging in a swing without anyone pushing � Free oscillation
2) Someone pushes the swing periodically � Forced or driven oscillations
Driven oscillations
Two frequencies:
(1) Natural angular frequency ω0 of the system �
when system oscillates freely after a sudden
disturbance.
(2) External frequency ω of the system � angular
Forced oscillations and resonance
(2) External frequency ω of the system � angular
frequency of the external driving force
causing the driven oscillations.
If “rigid support” moves up and down � forced
simple harmonic oscillator
)cos()( ϕω += txtx dm
Xm depends on ωd and ω
Velocity of oscillations greatest when: ω0= ω �
Resonance ���� Displacement amplitude greatest

Let us consider mass-spring system with resistive
force and applied force Fmcosω’’t
-kx-bv ma
Fm cosω”t

Here a mechanical oscillator of mass m, force
constant k and resistance b is being driven by an
alternating force Fm cos ωt
Equation of motion is
tFbvkxma ωcos+−−=
tFkxdt
dxb
dt
x
tFbvkxma
m
m
ω
ω
cosd
mor
cos
2
2
=++
+−−=
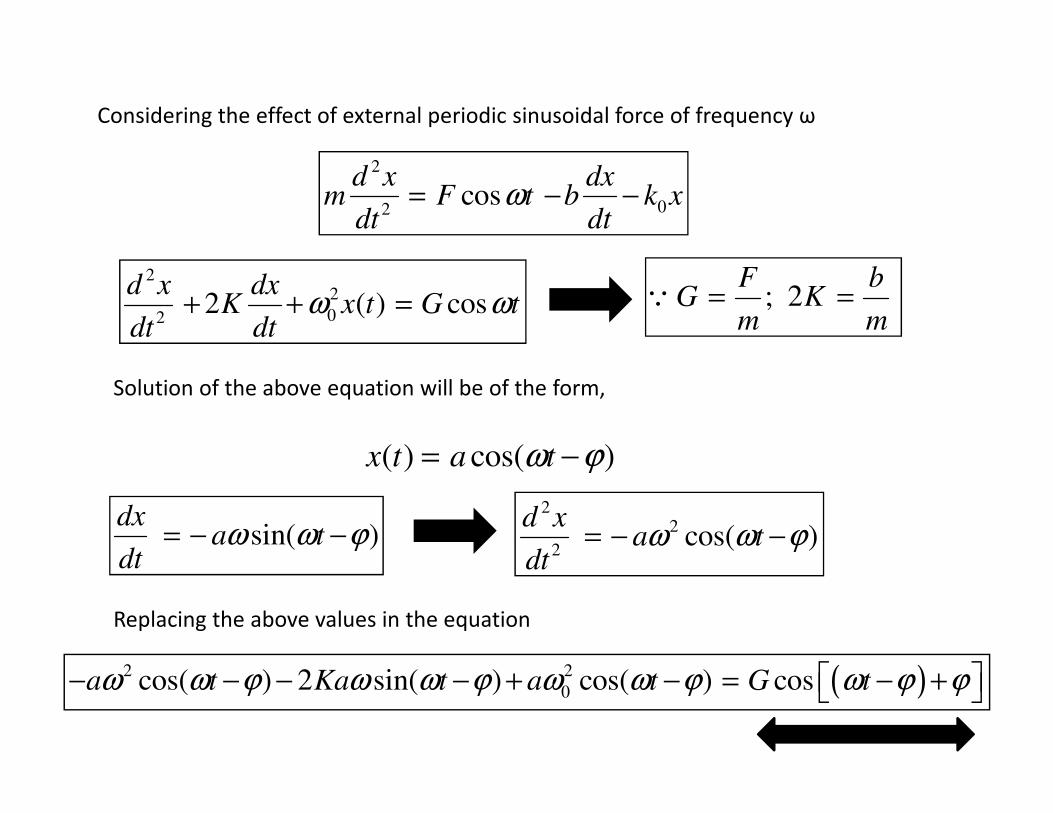
Considering the effect of external periodic sinusoidal force of frequency ω
2
02cos
d x dxm F t b k x
dt dtω= − −
22
022 ( ) cos
d x dxK x t G t
dt dtω ω+ + = ; 2
F bG K
m m= =Q
Solution of the above equation will be of the form,
( ) cos( )x t a tω ϕ= −
sin( )dx
a tdt
ω ω ϕ= − −2
2
2cos( )
d xa t
dtω ω ϕ= − −
Replacing the above values in the equation
( )2 2
0cos( ) 2 sin( ) cos( ) cosa t Ka t a t G tω ω ϕ ω ω ϕ ω ω ϕ ω ϕ ϕ − − − − + − = − +

( ) ( )
2 2
0( )cos( ) 2 sin( )
cos cos sin sin
a t Ka t
G t G t
ω ω ω ϕ ω ω ϕ
ω ϕ ϕ ω ϕ ϕ
− − − − −
= − − −
For above equation to be valid in all case we must have
2 2
0( ) cos
2 sin
a G
Ka G
ω ω ϕ
ω ϕ
− =
=
If we square and add, we haveIf we square and add, we have
1
2 2 2 2 2 20
( ) 4
Ga
Kω ω ω
=
− + ( )2 2
0
2tan
Kωϕ
ω ω=
−Further
Since K, ω nd a is positive, sinφ should be positive.
Thus we must add solution of damping case in this solution .

Thus assuming ω02 greater than K2 the general solution will be,
2 2
0( ) cos( ) cos ( )
ktx t Ae K t a tω θ ω ϕ−= − − + −
The first term on RHS represent the transient solution
corresponding to natural vibration of the system which will be
eventually die out. The second term represents the steady stateeventually die out. The second term represents the steady state
solution which corresponds to forced vibrations imposed by the
external force. Notice that the frequency of the forced vibration
is the same as that of the external force.

If the frequency of the driving force is equal to the natural
frequency of the oscillating system, maximum energy will
be transferred to the system and its amplitude of vibration
becomes maximum. This phenomenon is called resonance
and this frequency is known as resonant frequency.
1
2 2 2 2 2 20
( ) 4
Ga
Kω ω ω
=
− +
The amplitude of the forced vibration is given as,
© Manhattan Press (H.K.) Ltd.
0( ) 4Kω ω ω − +
This clearly shows that it depends upon frequency of the driving force and is
maximum when is minimum, i.e. 2 2 2 2 2
0( ) 4Kω ω ω− +
( )2 2 2 2 2
0( ) 4 0
dK
dω ω ω
ω− + = ( )2 2 2
02 ( 2 ) 8 0Kω ω ω ω− − + =
1
2 2
0 2
0
21
Kω ω
ω
= −

Forced oscillations and resonance
2
2
220
2)( ωωω
+−
=
m
b
GA
( )( )22
0
tanωω
ωφ
−= m
b

Driving Force applet
• In the next slide, it will show how a driving frequency will affect the natural frequency of the oscilliating object
• Try this:
• 1. Adjust the damping constant to 0.
Forced oscillations and resonance
• 2. Then adjust the natural frequency to maximum, which is about 0.40Hz. Observe how the motion of the mass will look like
• 3. Then, press the rewind button, and change the natural frequency to 0.20Hz, which is the same as the driving frequency. Observe how the motion of the mass has changed

For example
http://www.upscale.utoronto.ca/PVB/Harrison/Flash/ClassMechanics/DrivenSHM/DrivenSHM.html

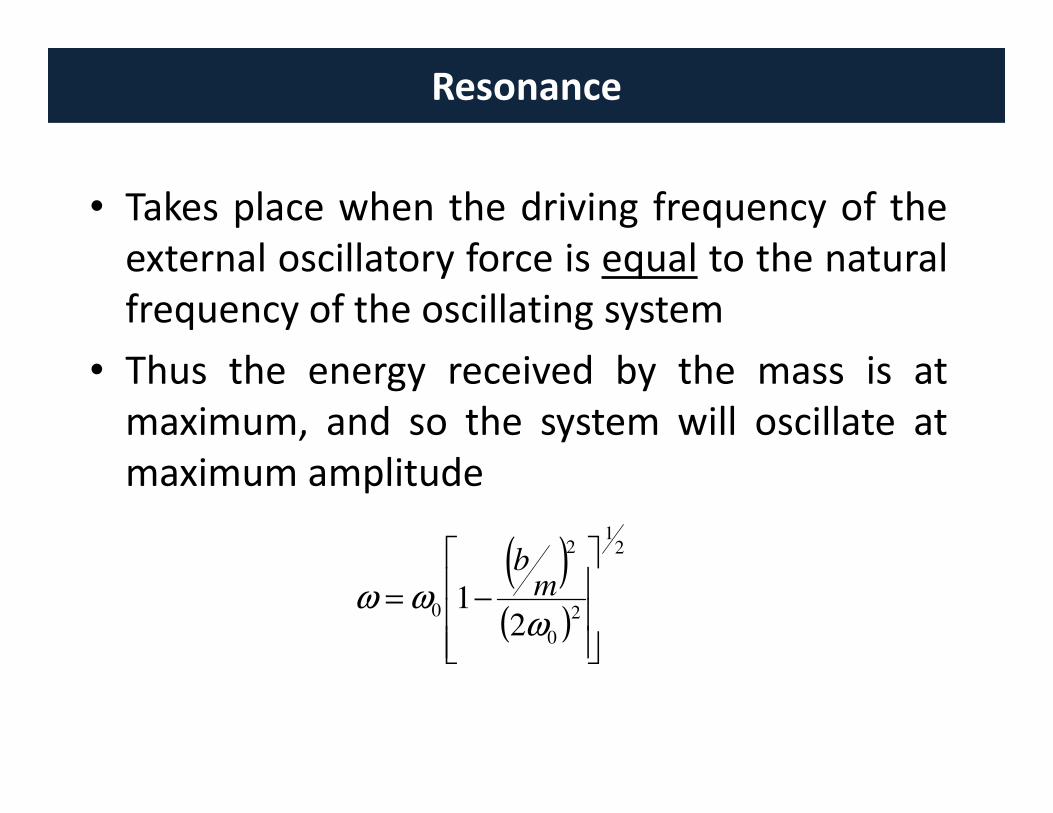
Resonance
• Takes place when the driving frequency of the
external oscillatory force is equal to the natural
frequency of the oscillating system
• Thus the energy received by the mass is at
maximum, and so the system will oscillate atmaximum, and so the system will oscillate at
maximum amplitude
( )( )
21
2
0
2
02
1
−=ω
ωω mb

Examples of Resonance
• This can be seen when sitting in a bus or van
• When the vehicle is stationary, the people will often feel that the bus is shaking very violently the bus is shaking very violently and vibrating vigorously
• However, when the vehicle is moving, the shaking gets less violent

• This is because when the vehicle is stationary,frequency of the engine vibration is slow. It equals tothe natural frequency of the cab of the vehicle, thusresonance occurs
• There is maximum amplitude of vibrations – violent• There is maximum amplitude of vibrations – violentvibrations
• However, when the lorry is moving faster, frequencyof engine vibrations increase, and is much faster thanthe natural frequency of the engine, thus noresonance occurs

Useful applications of Resonance
• Microwave ovens
– Heat up food through
radiation/ electromagnetic
waveswaves
– Food mainly gets heated up due to the absorption
of heat energy in the water molecules in the food

Useful applications of Resonance
– The frequency of microwaves corresponds to the
natural frequency of water molecules.
– The water molecules in the food placed in the
microwave oven resonate when subjected to
microwaves. microwaves.
– Thus, they absorb energy and consequently heat
up the food, enabling the food to be cooked


Useful applications of Resonance
• Magnetic Resonance
– Strong, varying radio frequency electromagnetic
fields are used to cause the nuclei of atoms to
oscillate.oscillate.
– In any given molecule, there will be many
resonant frequencies. Energy is absorbed
whenever resonance appears.

– The pattern of energy
absorption can be used to
detect the presence of
particular molecules within any
specimenspecimen
– False colour magnetic
resonance image on the right
shows woman’s abdomen at 8
months of pregnancy

Harmful effects of Resonance
• Vibrations of bridge structures
– Bridges especially suspension bridges are exposed
to variable amounts and frequencies of wind
everydayeveryday
– Bridges have multiple natural frequencies,
therefore as long as there is 1 driving frequency
equal to the natural frequency of the bridge, it
may possible rupture it

Forced resonant torsional oscillations due to wind - Tacoma Narrows Bridge
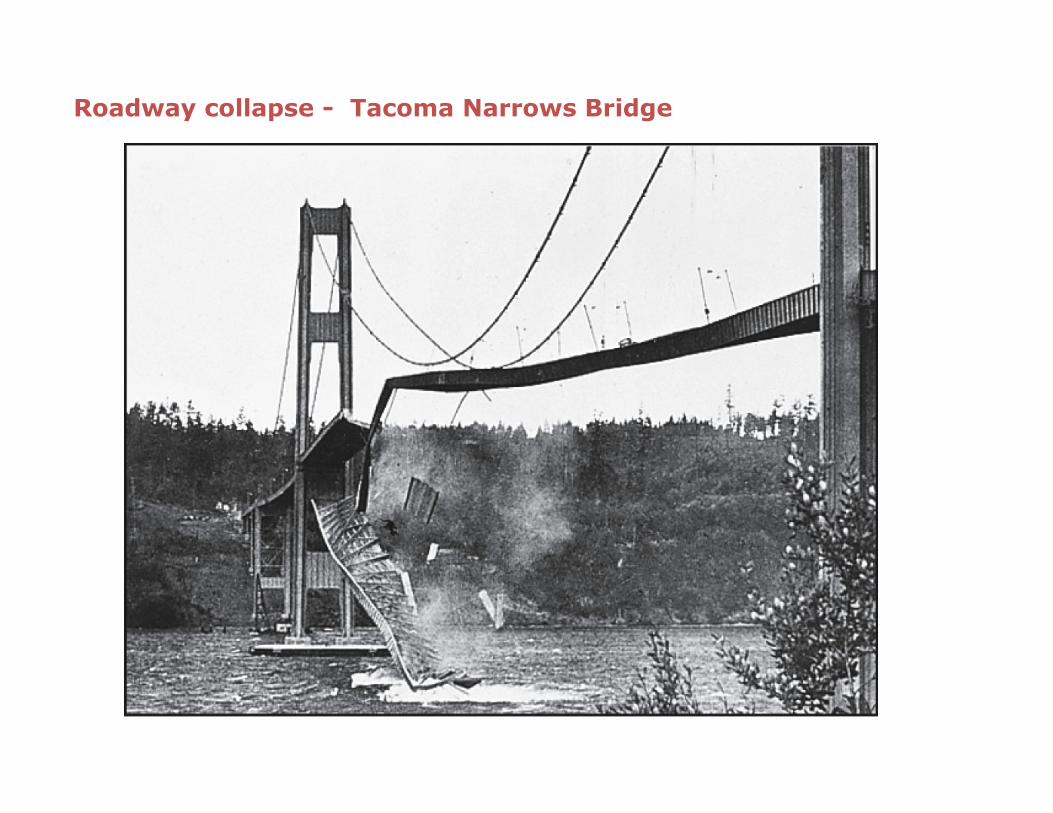
Roadway collapse - Tacoma Narrows Bridge

What happened?
• Wind, in this case, was the driving oscillating
force that matched the natural frequency of
the bridge
• This caused huge vibrations and amplitudes • This caused huge vibrations and amplitudes
built up, which eventually put stress on the
concrete, thus rupturing it

Another case
• Besides wind, there was also another peculiar
incident that happened on a bridge
• In 1831, a French battalion was marching over a
suspension bridge in Angers

• The bridge collapsed due to large amplitude of
oscillations built up in the system when the rhythm
of the marching steps matches the natural frequency
of vibration of the bridge
• Since then, it has been common practice to order
soldiers to break steps when crossing a bridge.

The Phase Velocity
How fast is the wave traveling?
Velocity is a reference distance divided by a reference time.
v = λ f
The phase velocity is the wavelength / period: v = λ / τ
Since f = 1/τ :
In terms of k, k = 2π / λ, and
the angular frequency, ω = 2π / τ, this is:
v = λ f
v = ω / k

The Group Velocity
This is the velocity at which the overall shape of the wave’s amplitudes, or the wave ‘envelope’, propagates. (= signal velocity)
Here, phase velocity = group velocity (the medium is non-dispersive)
Like vacuum

Dispersion: phase/group velocity depends on
frequency
Black dot moves at phase velocity. Red dot moves at group velocity.
This is normal dispersion (refractive index decreases with increasing λ)

Dispersion: phase/group velocity depends on
frequency
Black dot moves at group velocity. Red dot moves at phase velocity.
This is anomalous dispersion (refractive index increases with increasing λ)