komplexe analysis, oberwolfach, august 31, 2006 exceptional sets and fiber products andrew sommese...
Post on 22-Dec-2015
217 views
TRANSCRIPT

Komplexe Analysis, Oberwolfach, August 31, 2006
Exceptional Sets and Fiber Products
Andrew Sommese
University of Notre Dame
Charles Wampler
General Motors R&D Center

Komplexe Analysis, Oberwolfach, August 31, 2006 2
Reference on Numerical Algebraic Geometry up to 2005: A.J. Sommese and C.W. Wampler, Numerical
solution of systems of polynomials arising in engineering and science, (2005), World Scientific Press.
Recent articles are available at www.nd.edu/~sommese

Komplexe Analysis, Oberwolfach, August 31, 2006 3
Overview
A Motivating Problem Exceptional Sets and Fiber Products Numerical Algebraic Geometry
Isolated Solutions Positive Dimensional A Case Study

Komplexe Analysis, Oberwolfach, August 31, 2006 4
A Motivating Problem and an Approach to It
This is joint work with Charles Wampler. The problem is to find the families of overconstrained mechanisms of specified types.

Komplexe Analysis, Oberwolfach, August 31, 2006 5

Komplexe Analysis, Oberwolfach, August 31, 2006 6
for i from 0 to 5
Inverse Displacement Problem: determine the Li from (p,R)
Forward Displacement Problem: determine (p,R) from the Li
)()(2ii
Tiii aRbpaRbpL
3IRRT

Komplexe Analysis, Oberwolfach, August 31, 2006 7
If the lengths of the six legs are fixed the platform robot is usually rigid.
Husty and Karger made a study of exceptional lengths when the robot will move: one interesting case is when the top joints and the bottom joints are in a configuration of equilateral triangles.
Komplexe Analysis, Oberwolfach, August 31, 2006 8

Komplexe Analysis, Oberwolfach, August 31, 2006 9
Another Example
Komplexe Analysis, Oberwolfach, August 31, 2006 10
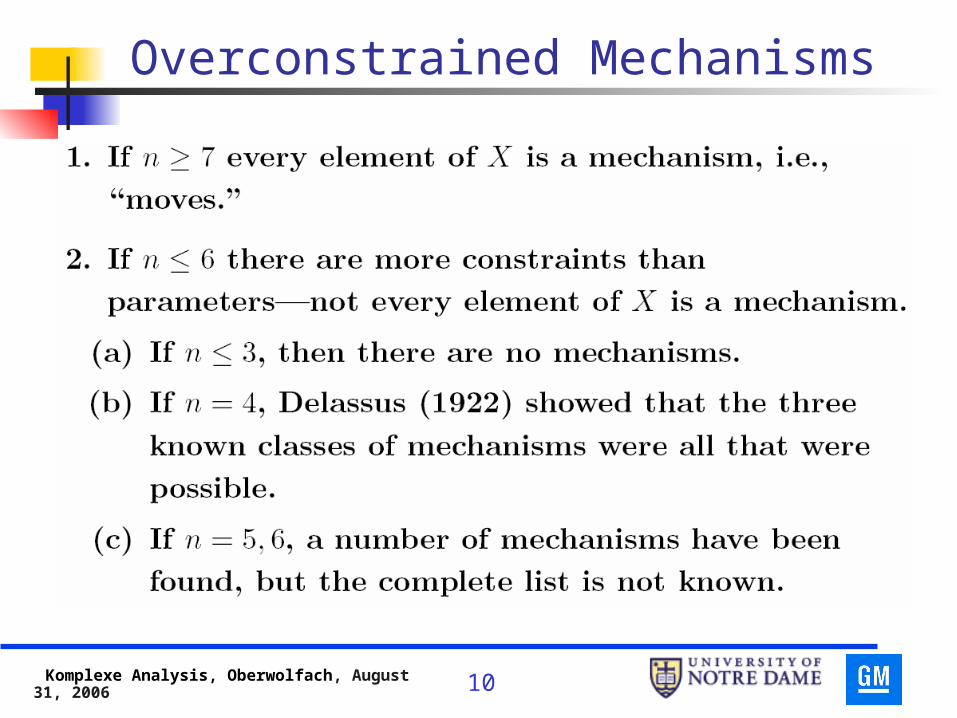
Overconstrained Mechanisms
Komplexe Analysis, Oberwolfach, August 31, 2006 11
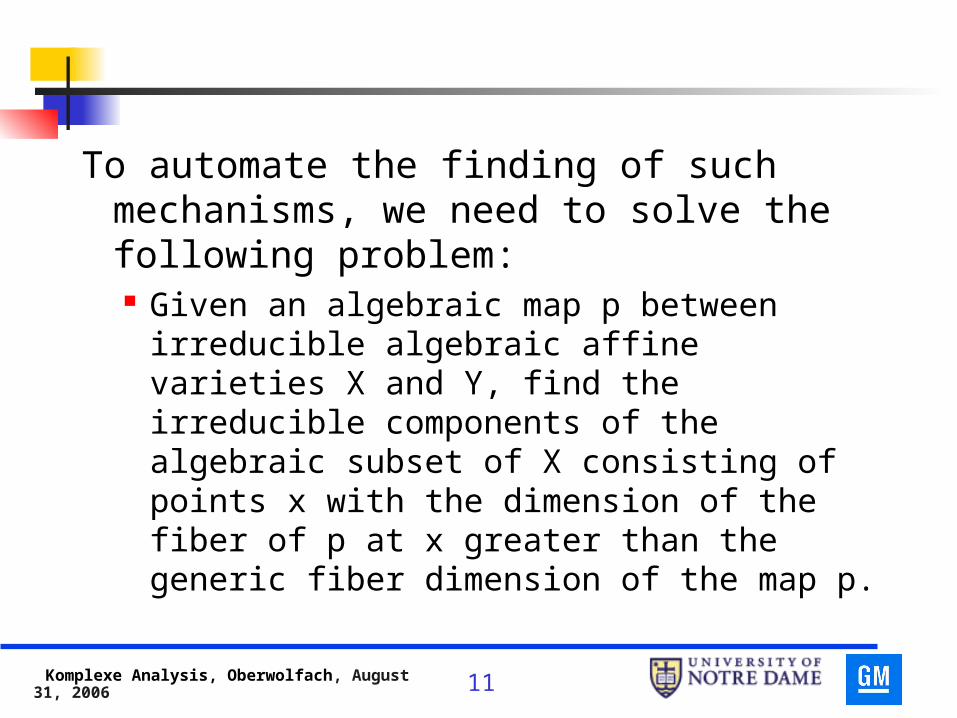
To automate the finding of such mechanisms, we need to solve the following problem: Given an algebraic map p between irreducible
algebraic affine varieties X and Y, find the irreducible components of the algebraic subset of X consisting of points x with the dimension of the fiber of p at x greater than the generic fiber dimension of the map p.

Komplexe Analysis, Oberwolfach, August 31, 2006 12
One Approach
A method to find the exceptional sets A.J. Sommese and C.W. Wampler, Exceptional
sets and fiber products, preprint.
A method to solve large systems with few solutions A.J. Sommese, J. Verschelde and C.W.
Wampler, Solving polynomial systems equation by equation, preprint.

Komplexe Analysis, Oberwolfach, August 31, 2006 13
Exceptional Sets

Komplexe Analysis, Oberwolfach, August 31, 2006 14
A Simple Example

Komplexe Analysis, Oberwolfach, August 31, 2006 15
Setup

Komplexe Analysis, Oberwolfach, August 31, 2006 16
Problem Statement

Komplexe Analysis, Oberwolfach, August 31, 2006 17
For
0);(212
11
xxq
xqqxf

Komplexe Analysis, Oberwolfach, August 31, 2006 18
Fiber Products

Komplexe Analysis, Oberwolfach, August 31, 2006 19

Komplexe Analysis, Oberwolfach, August 31, 2006 20
Main Components

Komplexe Analysis, Oberwolfach, August 31, 2006 21
The Notion of a Main Component

Komplexe Analysis, Oberwolfach, August 31, 2006 22

Komplexe Analysis, Oberwolfach, August 31, 2006 23

Komplexe Analysis, Oberwolfach, August 31, 2006 24
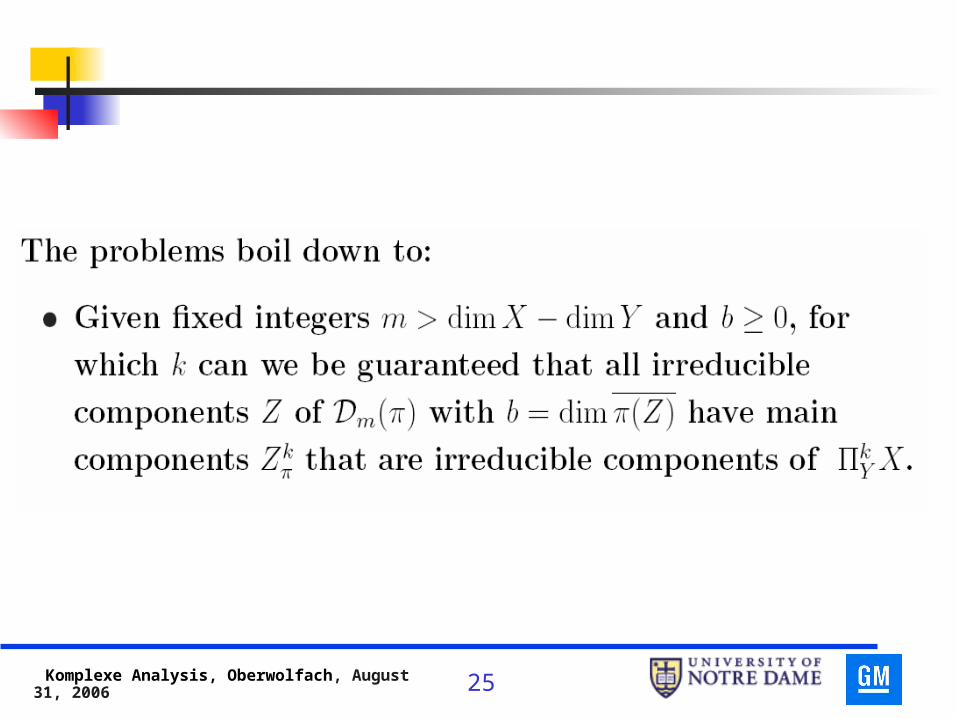
It is easy to recognize main components. An irreducible subset W of is a main component if
XkY
kZ
Komplexe Analysis, Oberwolfach, August 31, 2006 25

Komplexe Analysis, Oberwolfach, August 31, 2006 26
A Bound

Komplexe Analysis, Oberwolfach, August 31, 2006 27
An Alternate Bound

Komplexe Analysis, Oberwolfach, August 31, 2006 28
Numerical Algebraic Geometry
Isolated Solutions Positive Dimensional Solutions Bertini A Case Study

Komplexe Analysis, Oberwolfach, August 31, 2006 29
Computing Isolated Solutions
Find all isolated solutions in of a system on n polynomials:
NC
0
),...,(f
),...,(f
1n
11
N
N
xx
xx

Komplexe Analysis, Oberwolfach, August 31, 2006 30
Solving a system
Homotopy continuation is our main tool: Start with known solutions of a known start
system and then track those solutions as we deform the start system into the system that we wish to solve.

Komplexe Analysis, Oberwolfach, August 31, 2006 31
Path Tracking
This method takes a system g(x) = 0, whose solutions
we know, and makes use of a homotopy, e.g.,
Hopefully, H(x,t) defines “paths” x(t) as t runs
from 1 to 0. They start at known solutions of
g(x) = 0 and end at the solutions of f(x) at t = 0.
tg(x). t)f(x)-(1 t)H(x,

Komplexe Analysis, Oberwolfach, August 31, 2006 32
The paths satisfy the Davidenko equation
To compute the paths: use ODE methods to predict and Newton’s method to correct.
t
H
dt
dx
x
H
dt
t)dH(x(t),0
N
1
i
i
i

Komplexe Analysis, Oberwolfach, August 31, 2006 33
Solutions of
f(x)=0
Known solutions of g(x)=0
t=0 t=1H(x,t) = (1-t) f(x) + t g(x)
x3(t)
x1(t)
x2(t)
x4(t)

Komplexe Analysis, Oberwolfach, August 31, 2006 34
Newton correction
prediction
{
t
xj(t)
x*
01

Komplexe Analysis, Oberwolfach, August 31, 2006 35
Algorithms
middle 80’s: Projective space was beginning to be used, but the methods were a combination of differential topology and numerical analysis with homotopies tracked exclusively through real parameters.
early 90’s: algebraic geometric methods worked into the theory: great increase in security, efficiency, and speed.

Komplexe Analysis, Oberwolfach, August 31, 2006 36
Uses of algebraic geometry
Simple but extremely useful consequence of algebraicity [A. Morgan (GM R. & D.) and S.]
Instead of the homotopy H(x,t) = (1-t)f(x) + tg(x)
use H(x,t) = (1-t)f(x) + tg(x)

Komplexe Analysis, Oberwolfach, August 31, 2006 37
Genericity
Morgan + S. : if the parameter space is irreducible, solving the system at a random points simplifies subsequent solves: in practice speedups by factors of 100.
Komplexe Analysis, Oberwolfach, August 31, 2006 38
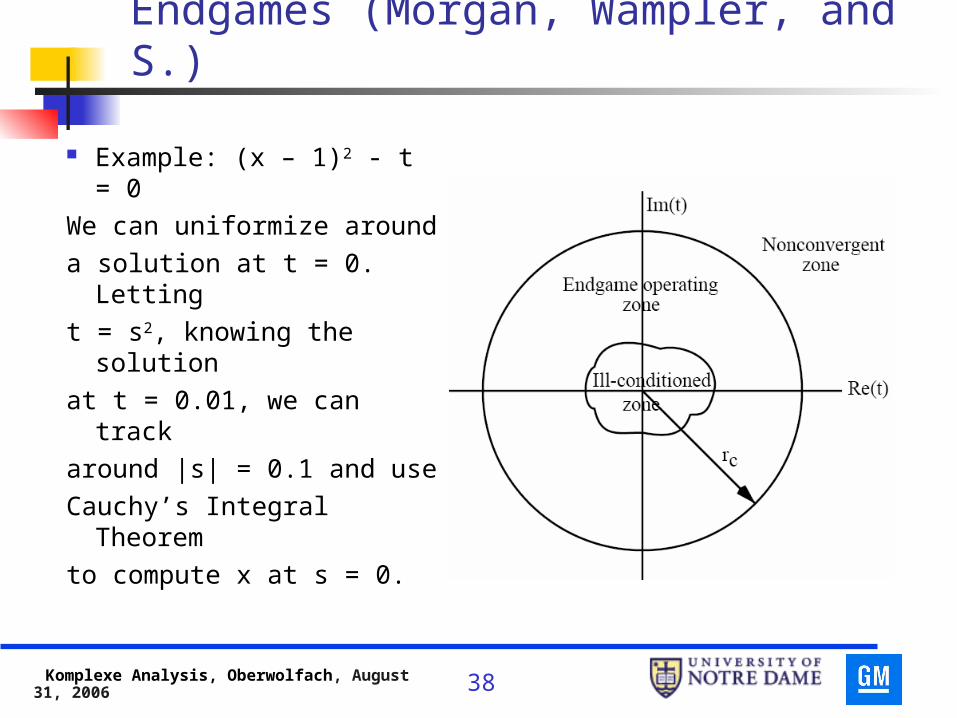
Endgames (Morgan, Wampler, and S.)
Example: (x – 1)2 - t = 0
We can uniformize around
a solution at t = 0. Letting
t = s2, knowing the solution
at t = 0.01, we can track
around |s| = 0.1 and use
Cauchy’s Integral Theorem
to compute x at s = 0.

Komplexe Analysis, Oberwolfach, August 31, 2006 39
Special Homotopies to take advantage of sparseness

Komplexe Analysis, Oberwolfach, August 31, 2006 40
Multiprecision
Not practical in the early 90’s! Highly nontrivial to design and dependent on
hardware Hardware too slow

Komplexe Analysis, Oberwolfach, August 31, 2006 41
Hardware
Continuation is computationally intensive. On average: in 1985: 3 minutes/path on largest mainframes.

Komplexe Analysis, Oberwolfach, August 31, 2006 42
Hardware
Continuation is computationally intensive. On average: in 1985: 3 minutes/path on largest mainframes. in 1991: over 8 seconds/path, on an IBM 3081;
2.5 seconds/path on a top-of-the-line IBM 3090.

Komplexe Analysis, Oberwolfach, August 31, 2006 43
Hardware
Continuation is computationally intensive. On average: in 1985: 3 minutes/path on largest mainframes. in 1991: over 8 seconds/path, on an IBM 3081;
2.5 seconds/path on a top-of-the-line IBM 3090. 2006: about 10 paths a second on an single
processor desktop CPU; 1000’s of paths/second on moderately sized clusters.

Komplexe Analysis, Oberwolfach, August 31, 2006 44
A Guiding Principle then and now
Algorithms must be structured – when possible – to avoid paths leading to singular solutions: find a way to never follow the paths in the first place.

Komplexe Analysis, Oberwolfach, August 31, 2006 45
Continuation’s Core Computation
Given a system f(x) = 0 of n polynomials in n unknowns, continuation computes a finite set S of solutions such that: any isolated root of f(x) = 0 is contained in S; any isolated root “occurs” a number of times
equal to its multiplicity as a solution of f(x) = 0; S is often larger than the set of isolated
solutions.

Komplexe Analysis, Oberwolfach, August 31, 2006 46
References
A.J. Sommese and C.W. Wampler, Numerical solution of systems of polynomials arising in engineering and science, (2005), World Scientific Press.
T.Y. Li, Numerical solution of polynomial systems by homotopy continuation methods, in Handbook of Numerical Analysis, Volume XI, 209-304, North-Holland, 2003.
Komplexe Analysis, Oberwolfach, August 31, 2006 47
Positive Dimensional Solution Sets
We now turn to finding the positive dimensional solution sets of a system
0
),...,(f
),...,(f
1n
11
N
N
xx
xx

Komplexe Analysis, Oberwolfach, August 31, 2006 48
How to represent positive dimensional components?
S. + Wampler in ’95: Use the intersection of a component with
generic linear space of complementary dimension.
By using continuation and deforming the linear space, as many points as are desired can be chosen on a component.
Komplexe Analysis, Oberwolfach, August 31, 2006 49
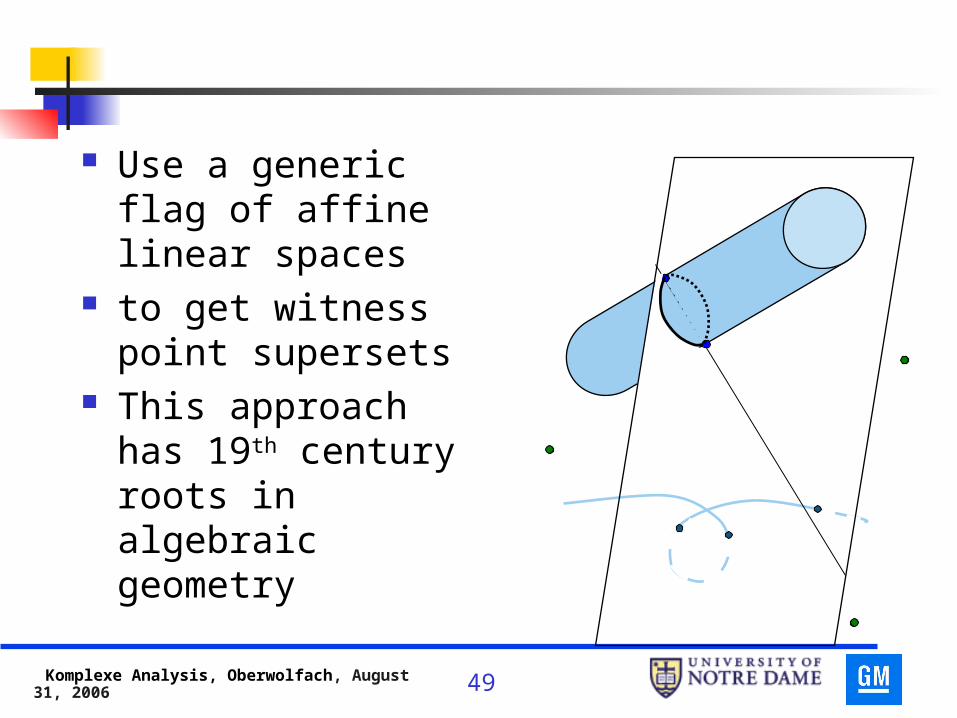
Use a generic flag of affine linear spaces
to get witness point supersets
This approach has 19th century roots in algebraic geometry

Komplexe Analysis, Oberwolfach, August 31, 2006 50
The Numerical Irreducible Decomposition
Carried out in a sequence of articles with
Jan Verschelde (Univiversity at Illinois at Chicago)
and Charles Wampler (General Motors Research and
Development) Efficient Computation of “Witness Supersets’’
S. and V., Journal of Complexity 16 (2000), 572-602. Numerical Irreducible Decomposition
S., V., and W., SIAM Journal on Numerical Analysis, 38 (2001), 2022-2046.

Komplexe Analysis, Oberwolfach, August 31, 2006 51
An efficient algorithm using monodromy S., V., and W., SIAM Journal on Numerical Analysis 40
(2002), 2026-2046.
Intersections of algebraic sets S., V., and W., SIAM Journal on Numerical Analysis 42
(2004), 1552-1571.

Komplexe Analysis, Oberwolfach, August 31, 2006 52
Symbolic Approach with same classical roots
Two articles in this direction: M. Giusti and J. Heintz, Symposia Mathematica
XXXIV, pages 216-256. Cambridge UP, 1993. G. Lecerf, Journal of Complexity 19 (2003), 564-596.

Komplexe Analysis, Oberwolfach, August 31, 2006 53
The Irreducible Decomposition

Komplexe Analysis, Oberwolfach, August 31, 2006 54
Witness Point Sets

Komplexe Analysis, Oberwolfach, August 31, 2006 55

Komplexe Analysis, Oberwolfach, August 31, 2006 56
Basic Steps in the Algorithm

Komplexe Analysis, Oberwolfach, August 31, 2006 57
Example

Komplexe Analysis, Oberwolfach, August 31, 2006 58

Komplexe Analysis, Oberwolfach, August 31, 2006 59
From Sommese, Verschelde, and Wampler,SIAM J. Num. Analysis, 38 (2001), 2022-2046.

Komplexe Analysis, Oberwolfach, August 31, 2006 60
Numerical issues posed by multiple components
Consider a toy homotopy
Continuation is a problem because the Jacobian with
respect to the x variables is singular.
How do we deal with this?
0),,(2
21
21
tx
xtxxH

Komplexe Analysis, Oberwolfach, August 31, 2006 61
Deflation
The basic idea introduced by Ojika in 1983 is
to differentiate the multiplicity away. Leykin,
Verschelde, and Zhao gave an algorithm for an
isolated point that they showed terminated.
Given a system f, replace it with
0
bzA
zJf(x)
f(x)

Komplexe Analysis, Oberwolfach, August 31, 2006 62
Bates, Hauenstein, Sommese, and Wampler:
To make a viable algorithm for multiple components, it is necessary to make decisions on ranks of singular matrices. To do this reliably, endgames are needed.

Komplexe Analysis, Oberwolfach, August 31, 2006 63
Bertini and the need for adaptive precision
Why use Multiprecision? to ensure that the region where an endgame
works is not contained the region where the numerics break down;

Komplexe Analysis, Oberwolfach, August 31, 2006 64
Bertini and the need for adaptive precision
Why use Multiprecision? to ensure that the region where an endgame
works is not contained the region where the numerics break down;
to ensure that a polynomial is zero at a point is the same as the polynomial numerically being approximately zero at the point;

Komplexe Analysis, Oberwolfach, August 31, 2006 65
Bertini and the need for adaptive precision
Why use Multiprecision? to ensure that the region where an endgame
works is not contained the region where the numerics break down;
to ensure that a polynomial is zero at a point is the same as the polynomial numerically being approximately zero at the point;
to prevent the linear algebra in continuation from falling apart.

Komplexe Analysis, Oberwolfach, August 31, 2006 66
Evaluation
To 15 digits of accuracy one of the roots of this polynomial is a = 27.9999999999999. Evaluating p(a) to 15 digits, we find that
p(a) = -2. Even with 17 digit accuracy, the approximate root a
is a = 27.999999999999905 and we still only have p(a) = -0.01.
128)( 910 zzzp

Komplexe Analysis, Oberwolfach, August 31, 2006 67
Wilkinson’s Theorem Numerical Linear Algebra
Solving Ax = f, with A an N by N matrix,
we must expect to lose digits of
accuracy. Geometrically, is
on the order of the inverse of the distance in
from A to to the set defined by det(A) = 0.
)](cond[log10 A
||||||||)( cond 1 AAA1NNP

Komplexe Analysis, Oberwolfach, August 31, 2006 68
One approach is to simply run paths that fail over at a higher precision, e.g., this is an option in Jan Verschelde’s code, PHC.
Komplexe Analysis, Oberwolfach, August 31, 2006 69
One approach is to simply run paths that fail over at a higher precision, e.g., this is an option in Jan Verschelde’s code, PHC.
Bertini is designed to dynamically adjust the precision to achieve a solution with a prespecified error. Bertini is being developed by Daniel Bates, Jon Hauenstein, Charles Wampler, and myself (with some early work by Chris Monico).

Komplexe Analysis, Oberwolfach, August 31, 2006 70
Issues
You need to stay on the parameter space where your problem is: this means you must adjust the coefficients of your equations dynamically.
Komplexe Analysis, Oberwolfach, August 31, 2006 71
Issues
You need to stay on the parameter space where your problem is: this means you must adjust the coefficients of your equations dynamically.
You need rules to decide when to change precision and by how much to change it.

Komplexe Analysis, Oberwolfach, August 31, 2006 72
The theory we use is presented in the article D. Bates, A.J. Sommese, and C.W. Wampler,
Multiprecision path tracking, preprint.
available at www.nd.edu/~sommese

Komplexe Analysis, Oberwolfach, August 31, 2006 73
Case Study: Alt’s Problem
We follow

Komplexe Analysis, Oberwolfach, August 31, 2006 74
A four-bar planar linkage is a planar quadrilateral with a rotational joint at each vertex.
They are useful for converting one type of motion to another.
They occur everywhere.

Komplexe Analysis, Oberwolfach, August 31, 2006 75
How Do Mechanical Engineers Find Mechanisms?
Pick a few points in the plane (called precision points)
Find a coupler curve going through those points
If unsuitable, start over.

Komplexe Analysis, Oberwolfach, August 31, 2006 76
Having more choices makes the process faster.
By counting constants, there will be no coupler curves going through more than nine points.

Komplexe Analysis, Oberwolfach, August 31, 2006 77
Nine Point Path-Synthesis Problem
H. Alt, Zeitschrift für angewandte Mathematik und Mechanik, 1923:
Given nine points in the plane, find the set of all four-bar linkages, whose coupler curves pass through all these points.
Komplexe Analysis, Oberwolfach, August 31, 2006 78
First major attack in 1963 by Freudenstein and Roth.

Komplexe Analysis, Oberwolfach, August 31, 2006 79
D′
Pj
δj
λj
µj
u b v
CD
x
y
P0
C′

Komplexe Analysis, Oberwolfach, August 31, 2006 80
Pj
δj
µj
b-δj
v
C
y
P0
θj
yeiθj
b
v = y – b
veiμj = yeiθj - (b - δj)
= yeiθj + δj - b
C′
Komplexe Analysis, Oberwolfach, August 31, 2006 81
We use complex numbers (as is standard in this area)
Summing over vectors we have 16 equations
plus their 16 conjugates
byeeby jii jj )(
axeeax jii jj )(
beyeby jii jj )(
aexeax jii jj )(

Komplexe Analysis, Oberwolfach, August 31, 2006 82
This gives 8 sets of 4 equations:
in the variables a, b, x, y, and
for j from 1 to 8.
byeeby jii jj )(
axeeax jii jj )(
beyeby jii jj )(
aexeax jii jj )(
,y ,x ,b ,a
jjj ,,λ

Komplexe Analysis, Oberwolfach, August 31, 2006 83
Multiplying each side by its complex conjugate
and letting we get 8 sets of 3 equations
in the 24 variables
with j from 1 to 8.
0δδ - x)- a(δ )x - a(δγ x)δ - (a γ)xδ - a( jjjjjjjj
0δδ - y) - b(δ )y - b(δγ y)δ - (b γ)yδ - b( jjjjjjjj
0γγγγ jjjj
jj γ, γand y ,x ,b ,a y, x,b, a,
1eγ jiθj

Komplexe Analysis, Oberwolfach, August 31, 2006 84

Komplexe Analysis, Oberwolfach, August 31, 2006 85
in the 24 variables
with j from 1 to 8.
0δδ - x) -a (δ )x - a(δγ x)δ -(a γ)xδ - a( jjjjjjjj
0δδ - y)- b(δ )y - b(δγ y)δ - (b γ)yδ - b( jjjjjjjj
0γγγγ jjjj
jj γ, γand y ,x ,b ,a y, x,b, a,

Komplexe Analysis, Oberwolfach, August 31, 2006 86

Komplexe Analysis, Oberwolfach, August 31, 2006 87
Using Cramer’s rule and substitution we have
what is essentially the Freudenstein-Roth
system consisting of 8 equations of degree 7.
Impractical to solve: 78 = 5,764,801solutions.

Komplexe Analysis, Oberwolfach, August 31, 2006 88
Newton’s method doesn’t find many solutions: Freudenstein and Roth used a simple form of continuation combined with heuristics.
Tsai and Lu using methods introduced by Li, Sauer, and Yorke found only a small fraction of the solutions. That method requires starting from scratch each time the problem is solved for different parameter values

Komplexe Analysis, Oberwolfach, August 31, 2006 89

Komplexe Analysis, Oberwolfach, August 31, 2006 90
Solve by Continuation
All 2-homog.systems
All 9-pointsystems
“numerical reduction” to test case (done 1 time)
synthesis program (many times)

Komplexe Analysis, Oberwolfach, August 31, 2006 91