kalasalingam university (kalasalingam academy...
TRANSCRIPT
M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
1
M. TECH. CURRICULAM & SYLLABUS M.Tech - PROCESS CONTROL & AUTOMATION ENGINEERING (REGULATION-2011)
KALASALINGAM UNIVERSITY (Kalasalingam Academy of Research and Education)
(Under Section of UGC Act 1956) Anand Nagar, Krishnan Koil – 626 126.
Srivilliputtur (via), Virudhunagar Dt., Tamil Nadu, INDIA.
M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
2
VISION AND MISION OF THE UNIVERSITY VISION
To be a Center of Excellence of International Repute in Education and Research.
MISSION
To Produce Technically Competent, Socially Committed Technocrats and Administrators through Quality Education and Research.
VISION OF THE DEPARTMENT
VISION
To emerge as a diversified knowledge sharing and research driven base in the domain of Instrumentation and Control Engineering.
MISSION � To provide quality education in the domain of Instrumentation and Control Engineering
through updated curriculum, effective Teaching and Learning process and state of the art Laboratory facilities.
� To provide opportunities for students and researchers to carryout research on advanced topics of Instrumentation and control system.
� To produce technically competent and readily employable Instrumentation and Control graduates with ample exposure towards team work, ethical standards and social responsibilities.
PROGRAMME EDUCATIONAL OBJECTIVES
The graduates of the department of Instrumentation and Control Engineering will be capable of:
PEO 1- Graduates of the programme will have professional competency by successful career in Process control, automation and inter- disciplinary fields PEO 2- Graduates of the programme will demonstrate life-long independent skills in research and contribute to technological growth in Process control and instrumentation PEO 3- Graduates of the programme will exhibit project management skills and ability to work in team to perform collaborative, multidisciplinary tasks in their profession.
PROGRAMME OUTCOMES The Outcomes of Under Graduate Programme in the Department of Instrumentation and Control Engineering are as follows:
On completion of the Post Graduate Programme, the students would possess the ability to:
1. Apply the knowledge gained through Science, Mathematics, fundamentals of Engineering and preliminary ideals of Instrumentation and Automation Engineering to invoke a basic framework of Engineering models.

M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
3
2. Identify, formulate and solve complicated problems arising in the domains of Linear and non linear systems, Sensors & Transducers, process control, industrial automation and Digital signal processing, to derive a conclusion using the principles of Mathematics and fundamental Engineering.
3. Indulge in the process of designing/development of Digital control systems, Programmable logic controller, Distributed control system and Industrial Automation through software, so as to meet the large scale professional requirements and expectations of industries.
4. Design and perform experiments in relation to Process Control, Robotics, Intelligent Instrumentation, intensified data analysis and conversions to derive out conclusive statements through the processes of simulation, numerical calculations and graphical representations.
5. Create, Select, learn and apply appropriate techniques, resources, and modern engineering and IT tools, including prediction and modeling, to complex control engineering with an understanding of the process complexity.
6. Assess social, legal and culture associated issues, with a clear knowledge about the roles and responsibilities of an engineer through a professional approach in collaborative and interdisciplinary research.
7. Gain knowledge about the ongoing contemporary issues in the field of control and Instrumentation and apply it in one’s work as a member and leader in a team.
8. Understand social responsibilities and professional ethics, and follow them regularly and Communicate with the engineering community, and with society at large, regarding complex engineering issues.
9. Able to engage in life-long learning independently, with a high level of confident and commitment to improve knowledge in Process control and Automation.
10. Appreciable communication schemes and drafting out significant reports and recording the processes/operations through effective documentation, with subsequent best impressions to the clients/customers/organization through presentations.
11. Handle and improvise projects related to engineering and management principles through the knowledge gained during the period of study.
12. Compatibility and long term self learning ability to meet the needs of Instrumentation and Control related Engineering.
M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
4
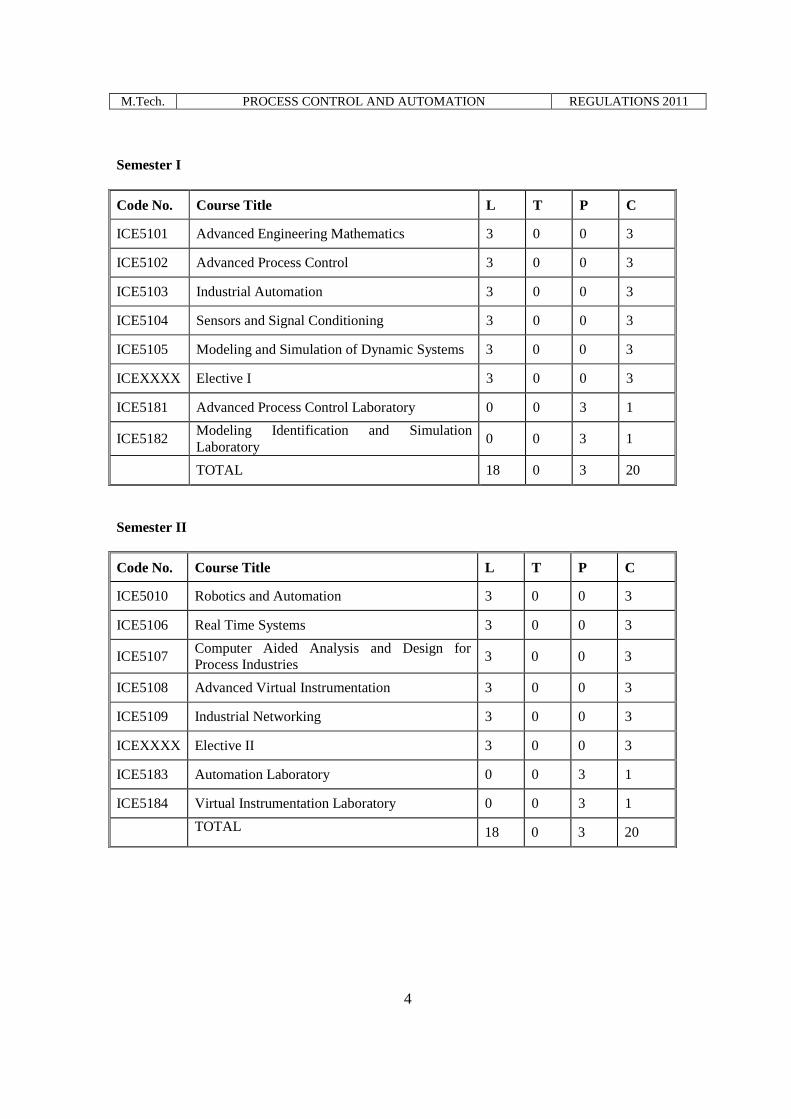
Semester I
Code No. Course Title L T P C
ICE5101 Advanced Engineering Mathematics 3 0 0 3
ICE5102 Advanced Process Control 3 0 0 3
ICE5103 Industrial Automation 3 0 0 3
ICE5104 Sensors and Signal Conditioning 3 0 0 3
ICE5105 Modeling and Simulation of Dynamic Systems 3 0 0 3
ICEXXXX Elective I 3 0 0 3
ICE5181 Advanced Process Control Laboratory 0 0 3 1
ICE5182 Modeling Identification and Simulation Laboratory
0 0 3 1
TOTAL 18 0 3 20
Semester II
Code No. Course Title L T P C
ICE5010 Robotics and Automation 3 0 0 3
ICE5106 Real Time Systems 3 0 0 3
ICE5107 Computer Aided Analysis and Design for Process Industries
3 0 0 3
ICE5108 Advanced Virtual Instrumentation 3 0 0 3
ICE5109 Industrial Networking 3 0 0 3
ICEXXXX Elective II 3 0 0 3
ICE5183 Automation Laboratory 0 0 3 1
ICE5184 Virtual Instrumentation Laboratory 0 0 3 1
TOTAL 18 0 3 20
M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
5
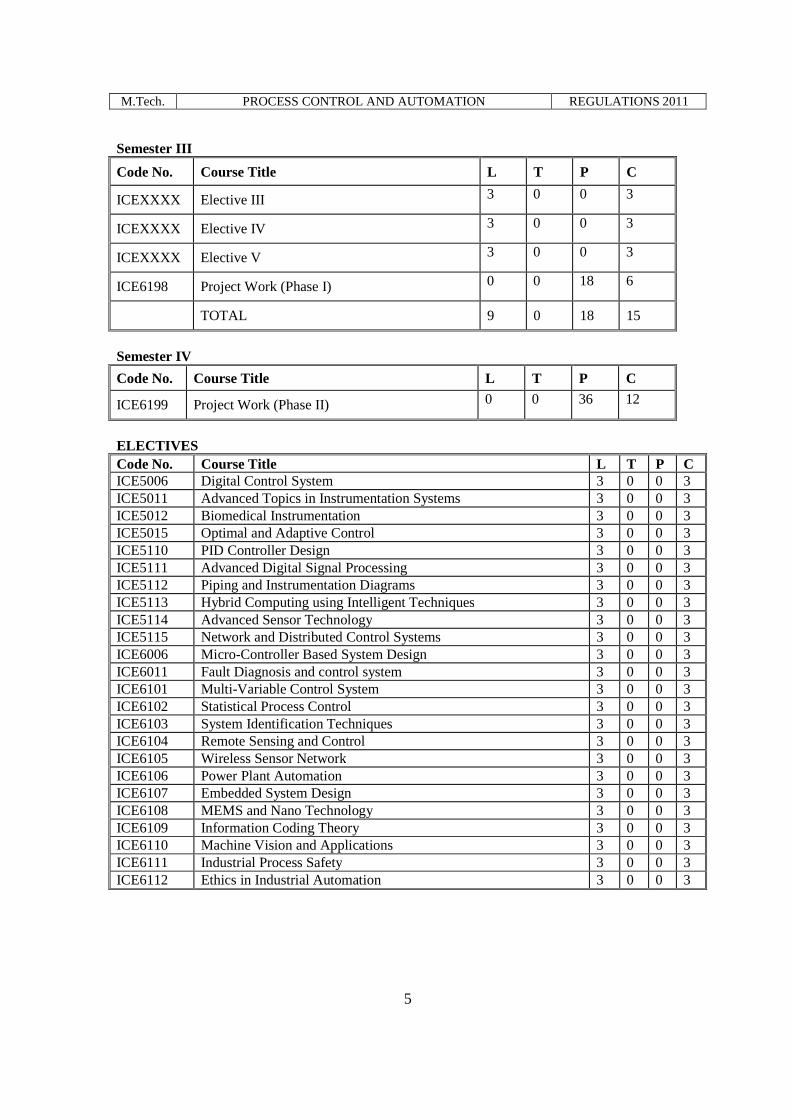
Semester III
Code No. Course Title L T P C
ICEXXXX Elective III 3 0 0 3
ICEXXXX Elective IV 3 0 0 3
ICEXXXX Elective V 3 0 0 3
ICE6198 Project Work (Phase I) 0 0 18 6
TOTAL 9 0 18 15
Semester IV
Code No. Course Title L T P C
ICE6199 Project Work (Phase II) 0 0 36 12
ELECTIVES Code No. Course Title L T P C ICE5006 Digital Control System 3 0 0 3 ICE5011 Advanced Topics in Instrumentation Systems 3 0 0 3 ICE5012 Biomedical Instrumentation 3 0 0 3 ICE5015 Optimal and Adaptive Control 3 0 0 3 ICE5110 PID Controller Design 3 0 0 3 ICE5111 Advanced Digital Signal Processing 3 0 0 3 ICE5112 Piping and Instrumentation Diagrams 3 0 0 3 ICE5113 Hybrid Computing using Intelligent Techniques 3 0 0 3 ICE5114 Advanced Sensor Technology 3 0 0 3 ICE5115 Network and Distributed Control Systems 3 0 0 3 ICE6006 Micro-Controller Based System Design 3 0 0 3 ICE6011 Fault Diagnosis and control system 3 0 0 3 ICE6101 Multi-Variable Control System 3 0 0 3 ICE6102 Statistical Process Control 3 0 0 3 ICE6103 System Identification Techniques 3 0 0 3 ICE6104 Remote Sensing and Control 3 0 0 3 ICE6105 Wireless Sensor Network 3 0 0 3 ICE6106 Power Plant Automation 3 0 0 3 ICE6107 Embedded System Design 3 0 0 3 ICE6108 MEMS and Nano Technology 3 0 0 3 ICE6109 Information Coding Theory 3 0 0 3 ICE6110 Machine Vision and Applications 3 0 0 3 ICE6111 Industrial Process Safety 3 0 0 3 ICE6112 Ethics in Industrial Automation 3 0 0 3

M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
6
PREREQUISITE Basic concepts of matrix theory, differentiation, integration, Random process and differential equations. COURSE OBJECTIVES
• To familiarize the students with the concept and techniques of differentiation and integration and their applications to engineering problems.
• To study the Eigen value problems and Differential equations. • To grasp the concepts in three dimensional geometry.
COURSE OUTCOMES
CO1: Find the Eigen values of a matrix and to use Cayley-Hamilton theorem & Jordan canonical form for finding the inverse of a matrix. CO2: find the calculus of variation using different methods. CO3: Apply partial derivatives to linear problems. CO4: Apply optimality concept for various dynamics problems CO5: Apply the random theory for performing random theory. COMPLEX VARIABLES Review of complex variables – Conformal mapping and transformations – Function of complex variables – Pole and singularity – Integration with respect to complex argument – Residues and basic theorems on residues. NUMERICAL ANALYSIS Introduction – Interpolation formulae – Difference equation – Roots of equations – Solution of simultaneous linear and non-linear equations – Solution techniques for ODE and PDE – Introduction to stability – Matrix Eigen value and Eigen vector problems. OPTIMIZATION TECHNIQUE Calculus of several variables – Implicit function theorem – Nature of singular points – Necessary and sufficient conditions for optimization – Elements of calculus variation – Constrained Optimization – Lagrange multipliers – Gradient method – Dynamic programming. LINEAR ALGEBRA Vector space – Linear dependence of vectors – basis – linear transformations – inner product space – rank and inverse of a matrix – solution of algebraic equations – consistency conditions – Eigen values and Eigen vectors – Hermitian and Skew Hermitian matrices. RANDOM PROCESS Classification – stationery random processes – auto correlation – cross correlations – power spectral density – linear system with input – Gaussian process.
ICE5101 ADVANCED ENGINEERING MATHEMATICS
L T P C
3 0 0 3
SEMESTER -I
M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
7
REFERENCES 1. John B. Conway, Functions of one complex variable, Springer International, Vol.11, 1978. 2. James Ward Brown and Ruel V. Churchill, Complex variable and application, McGraw Hill
International edition, 8th edition, 2008. 3. John H. Mathews, Numerical Methods for Mathematics , science and Engineering, PHI, edition 4. Sanyal.D.C and Das.K, A text Book of Numerical analysis, U.N. Dhar and Sons Pvt. Ltd. 5. Rao.S.S,, Optimisation theory and application, Wiely Eastern limited Hoffman and Kunze. R,
Linear Algebra, PHI, 2009. 6. Peebles Jr., Probability, Random Variables and Random Signal Principles, McGraw Hill Inc., 4th
edition, 1998.
PRE-REQUISITE:
Knowledge of system transfer function, control action, controllers and final control element is required.
COURSE OBJECTIVES: � To study the basic characteristics of first order and higher order processes. � To get adequate knowledge about the characteristics of various controller modes and
methods of controller tuning. � To study about various complex control schemes. � To study about the construction, characteristics and application of control valves.
COURSE OUTCOME: After the successful completion of the course, the students will be able to:
CO1 – Understand the mathematical modeling, controllers, final control elements and tuning processes. CO2: Apply fundamental knowledge of mathematics to modeling and analysis of fluid flow, level, pressure, temperature problems. CO3: Conduct experiments in pipe flows and open-channel flows and interpreting data from model studies to prototype cases. Documenting them in engineering reports. CO4: Understand the possible disasters caused by an incorrect Design/Analysis in hydraulic, pneumatic engineering system.
REVIEW OF SYSTEMS Review of first and higher order systems – closed and open loop response – Response to step – impulse and sinusoidal disturbances - Control valve types-linear – equal percentage and quick opening valve - Design of valves - Computing relays – simple alarms – Transient response - Block diagrams. STABILITY ANALYSIS Frequency response – design of control system – controller tuning and process identification. Ziegler-Nichols and Cohen-Coon tuning methods – Bode-Nyquist Plots - Process modeling. SPECIAL CONTROL TECHNIQUES Advanced control techniques – cascade – ratio – feed forward – adaptive control – selective controls – Smith predictor – internal model control – Model Predictive Control – Adaptive Control – MRAC – STR – STC theoretical analysis of complex processes.
ICE5102 ADVANCED PROCESS CONTROL
L T P C
3 0 0 3

M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
8
MULTIVARIABLE CONTROL Analysis of multivariable systems – Interaction – examples of storage tanks - Review of matrix algebra – Bristol arrays – Niederlinski index – Tuning of multivariable controllers. Nonlinear multivariable control – Model predictive control – quadratic DMC – generic model control – GMC application to chemical engineering systems – one step reference trajectory control SAMPLE DATA CONTROLLERS Basic review of Z transforms – Response of discrete systems to various inputs - Open and closed loop response to step – impulse and sinusoidal inputs – closed loop response of discrete systems - Design of digital controllers. REFERENCES 1. Coughanour.D.R, Process Systems analysis and Control, McGraw Hill, II Edition, 1991. 2. Seborg.D.E, Edger.T.F, and Millichamp.D.A, John Wiley and Sons, Process Dynamics and
Control, II Edition, 2004. 3. Smith.C.A and Corripio.A.B, John Wiley and Sons, Principle and Practice of Automatic Process
Control, 2nd Edition, 1997. 4. Luyben.W.L, Process Modeling Simulation and Control for Chemical Engineers, McGraw Hill, II
Edition, 1990. 5. Stephanopoulos, Chemical Process Control – Theory and Practice, Prentice Hall of India Ltd.,
1984. 6. Roffel.B, Betlem.B.H.L, Advanced Practical Process Control, Springer, 2004.
ICE5103 INDUSTRIAL AUTOMATION L T P C 3 0 0 3
PRE-REQUISITE To introduce the knowledge on the principle of sampled data control system. To impart the ideas of system modeling and identification of process. COURSE OBJECTIVES: To impart knowledge on Sampled data control system. Various discrete control algorithms and parameter estimation methods. Adaptive control algorithms COURSE OUTCOMES: Upon completion of this course, students should be able to: CO1: Understand the concept of digital control system. CO2. Analyze the need of discrete control system. CO3. Analyze the need for Feed forward intelligent and adaptive controllers. CO4. Apply the working knowledge of PLC,SCADA and DCS in real time applications. AUTOMATION OF ASSEMBLY LINES Concept of automation - mechanization and automation - Concept of automation in industry- balancing of assembly line using available algorithms - Transfer line-monitoring system (TLMS) using Line Status- Line efficiency- Buffer stock Simulation in assembly line. AUTOMATION USING HYDRAULIC AND ELECTRONIC SYSTEMS Design aspects of various elements of hydraulic systems such as pumps – valves – filters – reservoirs – accumulators – actuators - intensifiers etc - Selection of hydraulic fluid- practical case studied on

M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
9
hydraulic circuit design and performance analysis - signals processing- servo systems- programming of microprocessors using 8051 instruction. AUTOMATION USING PNEUMATIC SYSTEMS Pneumatic fundamentals - control elements - position and pressure sensing -logic circuits - switching circuits - fringe conditions modules and these integration - sequential circuits -cascade methods - mapping methods – step counter method - compound circuit design -combination circuit design - Pneumatic equipments - selection of components – design calculations - application - fault finding – hydro pneumatic circuits - use of microprocessors for sequencing – PLC – Real time – non real time process - HMI interface. AUTOMATED WORK PIECE HANDLING Working principles and techniques- job orienting and feeding devices - Transfer mechanisms automated feed cut of components- performance analysis - Uses of various types of handling systems including AGV and its various guiding technologies. CASE STUDY CNC Motion controller - Power plant controller - Cement plant control - Sugar plant control - Textile plant control REFERENCES 1. Groover, M.P., CAD/CAM, Prentice Hall, 1983. 2. Yoram Koren, Robotics for Engineers, McGraw Hill 1992 3. Paul, R.P., Robot Manipulators, MIT Press 1993 4. Pressman R.S, Numerical Control and CAM, John Wiley 1993. 5. Shearer P., Fluid Power Control, John Wiley. 6. Andrew Parr, Hydraulic and Pneumatics, Jaico Publishing House, 2011. 7. Bolton.W, Pneumatic and Hydraulic Systems, Butterworth Heineman, 1997.
ICE5104 SENSORS AND SIGNAL CONDITIONING
L T P C
3 0 0 3 PRE-REQUISITE:
a. Fundamentals of Basic Engineering b. Basic Knowledge in measurements c. Basic Idea about sensors
COURSE OBJECTIVES: To learn about a. Measurement Systems b. Working and applications of Various Transducers
COURSE OUTCOMES: After the successful completion of the course, the students will be able to: CO1: Understand various types of Sensors & Transducers and their working principle CO2: Analyze the smart sensors for their relevant applications. CO3: Develop the knowledge of some of the semiconductor& IC sensor. CO4: Understand the characteristics of various transducers CO5: Apply the knowledge of signal condition to various transducers. OVERVIEW
M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
10
Generalized instrumentation system – sensors – signal conditioning – single processing – display devices – PC based instrumentation system- data acquisition systems – PC interfaces – software – features. SIGNAL CONDITIONING Introduction to signal conditioning - Principles of signal conditioning – common signal conditioning operations – amplification – filtering – isolation – linearization – voltage or current excitation - Bridge amplifiers – amplifying bridge outputs – linearizing bridge outputs quarter bridge and half bridge - Filtering – radio frequency interference – filtering power supply – filtering amplifier inputs- filtering amplifier outputs. SIGNAL CONDITIONING CIRCUITS FOR SENSORS Signal conditioning for thermocouples – amplification - cold junction compensation –linearization - signal conditioner ICs - Signal conditioning for RTD – bridge amplifier - load resistance elimination - linearization and sensor fault detection - Signal conditioning for thermistors - bridge amplifier - linearization - Signal conditioning for strain gauges - Signal conditioning for LVDT - Signal conditioning for piezo electric sensors. PRINCIPLES OF DATA ACQUISITION Data acquisition systems – analog input/ output - digital input/ output – timing input/ output – data acquisition configurations – local data acquisition – plug-in data acquisition - parallel data acquisition – GPIB data acquisition - data acquisition using serial interfaces – UART interface - USB interface – IEEE – 1394 interface. NETWORKED DATA ACQUISITION Network data communication – Analog transmission – Digital transmission -Hybrid communication- Comparison of communication protocols. Local area networks – OSI model- LAN characteristics – LAN types – TCP/IP protocols – Network devices – Wireless LAN. REFERENCES 1. Mathivanan.N, PC-based Instrumentation-Concepts and Practice, Prentice-Hall. 2. Patranabis.D, Sensors and Transducers, Tata McGraw Hill, II Edition, 2003. 3. Doebelin.E.O, Measurement Systems Application and Design, McGraw Hill, 4th Edition, 2003. 4. Murty.D.V.S, Transducers and Instrumentation, PHI, New Delhi, 2009.
ICE5105 MODELING AND SIMULATION OF DYNAMIC SYSTEMS
L T P C
3 0 0 3
PRE-REQUISITE: Fundamentals of Basic Engineering, Basic Knowledge in process control, Basic Idea about mathematical modeling. COURSE OUTCOME: CO1: Understand the basic concept of modeling CO2: Develop a system with conventional modeling techniques. CO3: Understand the concept of modeling with recent scenario. CO4: Solve the problem using Eulers methods. CO5: design the parameter modeling
M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
11
INTRODUCTION TO MODELING A systematic approach to model building- classification of models - Conservation principles- thermodynamic principles of process systems. CONVENTIONAL MODELING TECHNIQUES Development of steady state and dynamic lumped and distributed parameter models based on first principles - Analysis of ill-conditioned systems. RECENT MODELING TECHNIQUES Development of grey box models - Empirical model building - Statistical model calibration and validation - Population balance models - Examples. SOLUTION STRATEGIES FOR LUMPED PARAMETER MODELS. Stiff differential equations - Solution methods for initial value and boundary value problems - Euler’s method - RK method- shooting method- finite difference methods - Solving the problems using MATLAB/SCILAB. SOLUTION STRATEGIES FOR DISTRIBUTED PARAMETER MODELS. Solving parabolic- elliptic and hyperbolic partial differential equations - Finite element and finite volume methods – Case study – Matlab – ODE – Discritization methods. REFERENCES 1. Hangos.K.M and Cameron.I.T, Process Modeling and Model Analysis, Academic Press, 2001. 2. Luyben.W.L, Process Modeling, Simulation and Control for Chemical Engineers, 2nd Edn.,
McGraw Hill Book Co., New York, 1990. 3. Ramirez.W.F, Computational Methods for Process Simulation, Butterworths, 1998. 4. Mark E. Davis, Numerical Methods and Modeling for Chemical Engineers, John Wiley and Sons,
1984. 5. Singiresu S. Rao, Applied Numerical Methods for Engineers and Scientists, Prentice Hall, Upper
Saddle River, NJ, 2001.
ICE5181 ADVANCED PROCESS CONTROL LAB L T P C
0 0 3 1
PRE-REQUISITE
The knowledge about basic control system design, Fundamentals of Mathematical equations
are required.
COURSE OBJECTIVES:
� Use and apply modern computational techniques and tools for solving chemical process control problems
� Become familiar with industrial Chemical Process Systems
COURSE OUTCOME: After the successful completion of the course, the students will be able to:
M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
12
CO1: Apply the control system to industrial parameters like that- fluid flow, level, pressure, temperature problems. CO2: Conduct experiments (in teams) in pipe flows and open-channel flows and interpreting data from model studies to prototype cases, as well as documenting them in engineering reports. CO3: Understand disasters caused by incorrect design/analysis in hydraulic, pneumatic engineering system. CO4: Identify optimal values for PID controller for any application.
1. Modeling of thermal process 2. Modeling of flow process 3. Modeling of level process 4. Modeling of pressure station 5. Modeling of interacting tank process 6. Modeling of non - interacting tank process 7. PID Controller tuning for real time processes 8. Fuzzy based PID controller tuning 9. Design of Fuzzy logic controller 10. PID controller using PLC 11. Cascade Control 12. Ratio Control
ICE5182 MODELING IDENTIFICATION AND SIMULATION LABORATORY
L T P C
0 0 3 1
PRE-REQUISITE
The knowledge about basic control system design, Fundamentals of Mathematical equations
are required.
COURSE OBJECTIVES:
� Use and apply modern computational techniques and tools for solving chemical process problems
� Become familiar with modeling of Chemical Process Systems.
COURSE OUTCOME: After the successful completion of the course, the students will be able to: CO1: Apply the control system to industrial parameters like that- fluid flow, level, pressure, temperature problems. CO2: Conduct experiments in pipe flows and open-channel flows and interpreting data from model studies to prototype cases, as well as documenting them in engineering reports. CO3: Understand disasters caused by incorrect design/analysis in hydraulic, pneumatic engineering system. CO4: Identify optimal values for fuzzy controller for any application.
1. Design a lead compensator for a Temperature control system.
M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
13
2. Design an estimator for a simple Pendulum and also design a reduced order estimator for the same.
3. Design a full order and reduced order compensator for satellite altitude control. 4. Design an integral control law for a motor speed system. 5. Design a system with pure time delay on heat exchanger model. 6. Design a full order observer for specified pole locations on a satellite model. 7. Design a tracking control to follow a sinusoid for a disk drive servomechanism using Matlab and
Simulink. 8. Design a fuzzy logic controller for liquid level system. 9. Realization of z-transforms and its properties for given systems. 10. Basics of Labview programming 11. Robust controller design for a process control application 12. System identification methods for various process control application
ICE5010 ROBOTICS AND AUTOMATION L T P C
3 0 0 3
PRE-REQUISITE:
Knowledge of sensors, drives (Actuators) and basic concept in Programming. OBJECTIVES:
• To provide comprehensive knowledge of robotics in the design, analysis and control point of view.
• Gaining knowledge to design a robot for Industrial applications. COURSE OUTCOME: Student will be able to, CO1: Know the concept, types and general applications of robotics. CO 2: Know the various parts of robot. CO 3: Study the various kinematics and dynamics of robots. CO 4: Know the various programming methods. CO5: Study the applications of robots in manufacturing and non-manufacturing sectors. INTRODUCTION TO ROBOT TECHNOLOGY Robot physical configuration and basic robot motions- Types of manipulators- constructional features- servo and non servo manipulators - Feedback systems and sensors- encoders and other feedback systems- vision- ranging systems- tactile sensors- Programming language description of VAL and other languages - Artificial intelligence- legged locomotion and Expert systems. MECHANICAL DESIGN OF ROBOT SYSTEM Robot motion – kinematics of robot motion – direct and inverse kinematics - Homogeneous transformations – rotation matrices - composite rotation matrices – Euler angle representation – Denavit Hattenberg representation and various arm configurations - linkages and joints – mechanism – method for location and orientation of objects – drive systems – end effectors – types – selection - classification and design of grippers – gripper force analysis.
SEMESTER -II
M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
14
ROBOT ARM DYNAMICS AND SENSORS Lagrange – Euler formulation - joint velocities – kinetic energy – potential energy and motion equations – generalized D’Alembert equations of motion -Functions of sensors – position and proximity’s sensing – tactile sensing – sensing - Joint forces – vision system – object recognition and image transformation – safety - Monitoring sensor systems – image analysis – application of image processing. ROBOT PROGRAMMING AND AI TECHNIQUES Types of programming – Teach pendant programming – basic concepts in AI Techniques – concept of knowledge representations – expert system and its Components. ROBOTIC WORK CELLS AND APPLICATIONS OF ROBOTS Robotic cell layouts – inter locks – humanoid robots – micro robots – application of Robots in surgery - manufacturing industries - space and underwater. REFERENCES 1. Yoram Koren, Robotics, McGraw Hill 1992 2. Groover.M.P, Industrial Robotics, Prentice Hall, 1992 3. Janakiraman P.A., Robotics and Image Processing, Tata McGraw Hill, 1995 4. Wesley, E. Sryda, Industrial Robots: Computer interfacing and Control PHI, 1985 5. Saeed B. Niku, Introduction to Robotics, Analysis, systems and Applications, Pearson Education,
2002. 6. Asada, Slotine, Robot Analysis and Control, John Wiley and Sons, 1986 7. Groover.M.P. Mitchell Wesis., Industrial Robotics Technology Programming and Applications,
Tata McGraw Hill, 1986
ICE5106 REAL TIME SYSTEMS
L T P C
3 0 0 3
COURSE OBJECTIVES: 1. Understand the general embedded system concepts , design of embedded hardware and software development tools 2. Learn the basics of real time operating and embedded systems and apply them to real world processes. 3. Understand key issues such as CPU scheduling, memory management, task synchronization, and file system in the context of real-time embedded systems. COURSE OUTCOMES: After completing this course the student will be able to CO1. Able to design real-time systems CO2. Define the unique design problems and challenges of real-time systems and program CO3. Identify the unique characteristics of real-time operating systems and evaluate the need for real-time operating system and explain the general structure of a real-time system with reference to applications. CO4. Utilize and use RTOS to build an simple embedded real-time system SYSTEM DESIGN
M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
15
Definitions - Classifications and brief overview of microcontrollers - microprocessors and DSPs - Embedded processor architectural definitions - Typical application scenarios of embedded systems – OS and RTOS for Embedded System. INTERFACE ISSUES RELATED TO EMBEDDED SYSTEMS A/D - D/A converters – timers – actuators – power – FPGA – ASIC - diagnostic port AXI interface - Advanced microcontroller bus architecture. TECHNIQUES FOR EMBEDDED SYSTEMS State machine - state tables in embedded design - simulation – types – discrete - cycle bared - continuous time - coupled analytic - random input - emulation of embedded systems - High-level language descriptions of S/W for embedded system - Java embedded system design REAL TIME MODELS, LANGUAGE AND OPERATING SYSTEMS Event based - process based - graph based models - Petrinet models - Real time languages - real time kernel - OS tasks - task states - task scheduling - interrupt processing – clocking - communication – threads – synchronization - Control blocks - memory requirements – control - kernel services CASE STUDIES Examples of complete embedded systems using MC68 HC11 - MC8051 - ADSP2181 - PIC series of microcontroller REFERENCES 1. Evesham, Developing Real Time Systems - A Practical Introduction, Galgotia Publications, New
Delhi, 1996 2. Levi S., Agrawala A.K., Real Time System Design, McGraw Hill, Singapore, 1990 3. Ball S.R., Embedded microprocessor systems - Real World Design, Prentice Hall, 2002 4. Herma K., Real Time Systems - Design for Distributed Embedded Applications, Kluwer
Academic, 2011. 5. Gajski D.D, Vahid F, Narayan S., Specification and Design of Embedded Systems, PRT Prentice
Hall, New Dehi, 1994 6. Slater M., Microprocessor based design, a Comprehensive guide to effective hardware design,
Prentice Hall, New Jersey, 1989
ICE5107 COMPUTER AIDED ANALYSIS AND DESIGN FOR PROCESS INDUSTRIES
L T P C
3 0 0 3
PRE-REQUISITE To gain knowledge in compensator and controller design, state variable analysis, non-linear systems and optimal control. COURSE OBJECTIVES: The objective of this course is to expose students to the methods of control engineering that emerged in the field during the past 5 decades. As the industry is geared towards adopting these methods to build large scale and complex systems, this course prepares the student to take up such challenges in his profession. COURSE OUTCOME: Upon completing the course, the student should have

M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
16
CO1: Understand the concept of physical system and algorithm for system simulation. CO2: Analyze the system using system design. CO3: Understand the simulation of control system. CO4: Perform closed loop control system. CO5: Synthesis the controller in various controller software programming. ALGORITHM FOR SYSTEM SIMULATION Linear and non linear equation – solution – computation algorithm – transfer function and state space model – realization – simulation – properties CONTROLLER DESIGN Algorithms for developing bode – nyquist – polar plots - optimization – controller design – system performance evaluation SIMULATION OF PHYSICAL SYSTEMS Simulation of electrical – mechanical – hydraulic – thermal – process systems CLOSED LOOP OPERATION Design of controllers – sensor dynamics – noise generation – closed loop simulation SYMBOLIC PROGRAMMING Introduction- symbolic programming – programming constructs – data structure – computation with formulae - procedures – numerical programming REFERENCES 1. Chen, System and signal analysis, second edition, Oxford University press, II Edition, 2004. 2. Dorf and Bishop, Modern control engineering, Addison Wesley, 12th Edition, 2010. 3. Ogatta.K., Modern control Engineering , 5th edition, Pearson education 2002 4. MATLAB/ SIMULINK user manual, MATHCAD / VIS SIM user manual.
ICE5108 ADVANCED VIRTUAL INSTRUMENTATION
L T P C
3 0 0 3 PREREQUISITE Concepts of Data Acquisition Systems and Basics of LabVIEW Programming COURSE OBJECCTIVES
• To know about virtual versus traditional instruments, programming techniques • To know about A/D and D/A converter and data acquisition. • To know about PC buses, Instrumentation buses and network protocols. • To design using VI software of controllers To know about PC operating system and
instrumentation COURSE OUTCOMES CO1: Develop ability for programming in LabVIEW using various data structures, program structures, plotting the graphs and charts for system monitoring, processing and controlling CO 2: Understand the basics of interfacing and programming using related hardware CO 3: Understand the interfacing of DAQ devices and customized user designed hardware with Lab VIEW

M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
17
CO 4: Acquire knowledge about implementation and designing of Machine Vision and motion control CO 5: Write the Certified LabVIEW Associate Developer (CLAD) exam, administered by National Instruments, for the certification and leading to placements in core companies INTRODUCTION Historical perspective - basic concepts - blocks diagram and Architecture of a virtual instrument - data-flow techniques - graphical programming in data flow- comparison with conventional programming - Development of Virtual Instrument using GUI - LabVIEW- front panel – block diagram - Evolution of LabVIEW - advantages of LabVIEW.
LABVIEW PROGRAMMING TECHNIQUES VIs and sub-VIs - loops and charts- arrays - clusters and graphs - case and sequence structures - formula nodes - local and global variables - string and file I/O-tables-Property node-invoke nodes-memory management and multithreading- Configuring VI-VI server-calling code from other language - Object oriented programming in LabVIEW.
DATA ACQUISITION AND INSTRUMENT INTERFACE Introduction to data acquisition on PC - Sampling fundamentals - Input/Output techniques and buses - ADC-DAC-Digital I/O - counters and timers - DMA-Current loop- RS 232C/ RS485, GPIB, USB, PCMCIA, VXI, SCSI, PCI, PXI - Fire wire - PXI system controllers- Ethernet control of PXI - Networking basics for office and Industrial applications- VISA and IVI - Active-X Programming - VISA programming. CONTROL SYSTEM AND PID CONTROLLER DESIGN Creating models-Creating continuous-time- discrete-time- transfer function- state space model- PID controllers-Writing/Reading models to/from file - Converting Control Design models to/from Simulation Module models – Simulation - time response - Frequency response - PID - PID Advanced - PID Auto tuning - PID Set point Profile -PID Control Input Filter-PID Gain Schedule-PID Output Rate Limiter-The PID Lead-Lag. Control system analysis and simulation APPLICATIONS OF VIRTUAL INSTRUMENTATION Simulation of State feedback controller design for satellite altitude control - Simulation of house heating system - Simulation of smith predictor algorithm - Simulation of horizontal nonlinear tank. REFERENCES 1. Gary Johnson, LabVIEW Graphical Programming, Second edition, McGraw Hill, Newyork,
2006. 2. Lisa K. wells and Jeffrey Travis, LabVIEW for everyone, Prentice Hall, New Jersey, 3rd edition,
2006. 3. Rick Bitter, Taqi Mohiuddin, Matt Nawrocki, LabVIEW Advanced programming techniques,
CRC Press/Taylor and Francis Group, 2007 4. Kevin James, PC Interfacing and Data Acquisition: Techniques for Measurement,
Instrumentation and Control, Newnes, 2000. 5. Sumathi.S, P.Surekha, LabVIEW based advanced instrumentation systems, Springer, 2007.
M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
18
ICE5109 INDUSTRIAL NETWORKING L T P C
3 0 0 3
COURSE OUTCOME: After the successful completion of the course, the students will be able to: COURSE OUTCOME: After the successful completion of the course, the students will be able to: CO1: Understand the basic principle of communication and the modes of data transmission CO2: Understand the various types of bus devices used for data communication in industry. CO3: Understand about profibus for data communication. CO4: Use HART protocols used for data analysis. CO5: design the network using profibus-PA to relevant applications INTERFACE Introduction - principles of interface - serial interface and its standards - Parallel interfaces and buses. FIELDBUS Use of field buses in industrial plants – functions - international standards – performance - use of Ethernet networks - field bus advantages and disadvantages - Field bus design- installation- economics and documentation – MODBUS protocol PROFIBUS Basics – architecture – model - network design and system configuration – PROFIBUS-DP and PROFIBUS-PA INSTRUMENTATION NETWORK DESIGN AND UPGRADE Instrumentation design goals - cost optimal and accurate sensor networks - Global system architectures- advantages and limitations of open networks - HART network and foundation field bus network DESIGNING PROFIBUS-PA AND FOUNDATION FIELD BUS SEGMENTS General considerations - network design – communication wireline and wireless protocol – MATLAB toolbox REFERENCES 1. Noltingk B.E., Instrumentation Reference Book, 2nd Edition, Butterworth Heinemann,
1995. 2. Liptak.B.G, Process software and digital networks, 3rd Edition, CRC press, Florida. 3. Madhuchchaanda Mitra and Samarjit Sen Gupta, PLCs and Industrial Automation Introduction,
2008. 4. Bjorn Axelsson and Geoff Easten, Industrial network: a new view of reality, 1992.

M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
19
ICE5183 AUTOMATION LABORATORY L T P C
0 0 3 1
COURSE OBJECTIVES: To design the automatic control for complex process. COURSE OUTCOME: After successful completion of this course the students can be able to: CO1: Design of signal conditioning circuits for various applications CO2: Analyze signal transmission techniques and their design CO3: Use the data acquisition systems interface techniques in to relevant applications. CO4: Understand the function of distributed control systems List of Experiments: 1. PLC with system I/O 2. PLC networking 3. Open PLC software 4. Introduction to motion control 5. GPIB interface 6. Study and application of robot manipulator 7. Study and application of SCADA trainees system 8. Operation of PLC counter 9. Design of ladder logic for automated system 10. Serial communication interface 11. HART protocol 12. Ethernet 13. Application of PROFIBUS 14. Application of DCS
ICE5184 VIRTUAL INSTRUMENTATION LABORATORY
L T P C
0 0 3 1
COURSE OBJECTIVES: 1. It provides new concepts towards measurement and automation through LabVIEW. 2. It gives knowledge about how to control an external measuring device by interfacing a computer. 3. To become competent in data acquisition and instrument control. 4. It gives knowledge networking 5. It provides knowledge on developing different applications in Digital image processing ,control system, signal processing, and in simulation. COURSE OUTCOMES: Upon completion of this course, students should be able to: CO1: Design virtual instrument for any application CO2: Acquire ,analyze and display the result of any project performed CO3: Suggest a device to be interfaced based on the design constrains
M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
20
List of Experiments: 1. Development of virtual instrument using GUI 2. Circuit simulation using LabVIEW. 3. Development of Sub VI's 4. Development of digital logic using LabVIEW. 5. Measurement of strain of a given structure and publishing it in the web 6. Thermocouple Cold junction compensation using LabVIEW. 7. Development of temperature control system using LabVIEW. 8. Development of Level control system using LabVIEW. 9. Control of a given process using Real Time Embedded controller 10. Dead beat control of nonlinear system using LabVIEW. 11. Minimum order observer design for inverted pendulum. 12. Circuit Simulation using NI-ELVIS. 13. Control of a given process using fieldbus.
ICE5006 DIGITAL CONTROL SYSTEM
L T P C
3 0 0 3 PRE-REQUISITE To provide sound knowledge on the principles of discrete data control system COURSE OBJECTIVES: � To equip the students with the basic knowledge of A/D and D/A conversion � To understand the basics of Z- Transform � To study the stability analysis of digital control system � To equip the basic knowledge of digital process control design COURSE OUTCOMES: Student can be able to: CO1: Students will have the basic knowledge of A/D and D/A conversion CO2: Students will have the knowledge of Z- Transform CO3: Students will have knowledge of digital process control design CO4: Design and compensate the digital control system. INTRODUCTION Sampling and holding – Sample and hold devices – D/A and A/D conversion – Reconstruction – Z transform – Inverse Z transform – Properties – Pulse transfer function - state variable approach – Review of controllability - observability DESIGN USING TRANSFORM TECHNIQUES Methods of discretisation – Comparison – Direct design – Frequency response methods DESIGN USING STATE SPACE TECHNIQUES State space design – Pole assignment – Optimal control – State estimation in the presence of noise – Effect of delays COMPUTER BASED CONTROL Selection of processors – Mechanization of control algorithms – PID control laws predictor merits and demerits – Application to temperature control – Control of electric drives – Data communication for control
ELECTIVES

M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
21
QUANTIZATION EFFECTS AND SAMPLE RATE SELECTION Analysis of round off error – Parameter round off – Limit cycles and dither – Sampling theorem limit – Time response and smoothness – Sensitivity to parameter variations – Measurement noise and anti aliasing filter – Multi-rate sampling REFERENCES 1. Gopal. M., Digital control Engineering, Wiley Eastern Ltd.1989 2. Franklin G. F. , David Powell J., Michael Workman, Digital control of Dynamic Systems, 3rd
Edition, Addison Wesley, 2005 3. Paul Katz, Digital control using Microprocessors, Prentice Hall, 1981 4. Forsytheand. W. Goodall. R. N., Digital Control, McMillan,1991 5. Chesmond, Wilson, Lepla, Advanced Control System Technology, Viva – low price edition, 1998
ICE5011 ADVANCED TOPICS IN INSTRUMENTATION SYSTEMS
L T P C
3 0 0 3
PRE – REQUISITE: Knowledge of sensors measurements system is required. OBJECTIVES:
• To provide comprehensive knowledge of instrumentation in the design, analysis and control point of view.
• Gaining knowledge to design an Instrument for Industrial applications. COURSE OUTCOME: Student will be able to CO1: Know the concept, types and general principles of Fibre optic instrumentation. CO2: Study the concept of Laser technology and its usage in Instrumentation. CO3: Understand the concept and application of microcontroller based instrumentation. CO4: Get an idea for the usage of smart instruments in process industries. CO5: Have an idea about the utilization of virtual instruments in industries. FIBRE OPTIC INSTRUMENTATION Fiber optics sensors - fiber optic instrumentation system - different types of modulators – detectors - interferometer method of measurement of length - moire fringes - measurement of pressure - temperature – current – voltage - liquid level and strain - fiber optic gyroscope-polarization maintaining – characteristics. LASER INSTRUMENTATION Laser for measurement of distance – length – velocity – acceleration – current – voltage - atmospheric effect - material processing - laser heating – welding - melting and trimming of materials - removal and vaporization EMBEDDED INSTRUMENTATION Terminology – Gates – Timing diagram – Memory – Microprocessor buses – Direct memory access – Interrupts – Built interrupts – Interrupts basis – Shared data problems – Interrupt latency - Embedded system evolution trends – Interrupt routines in an RTOS environment.

M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
22
SMART INSTRUMENTS Smart/intelligent transducer - comparison with conventional transducers - self diagnosis and remote calibration features - smart transmitter with hart communicator - measurement of strain – flow - and PH with smart transmitters ULTRASONIC INSTRUMENTS Ultrasonic method of measuring thickness – depth – flow – variables affecting ultrasonic testing in various applications – ultrasonic applications – ultrasonic applications in medical diagnosis – therapy – acoustical holography. REFERENCES 1. Chapman P., Smart Sensors, ISA Publications,1996 2. Jasprit Singh, Semiconductor Opto-electronics, McGraw Hill, 1995 3. Raj Kamal, “Embedded Systems - Architecture, Programming and Design” Tata McGraw Hill,
2006. 4. Smith, H.M., Principles of Holography, Second edition, John Wiley and Sons, New Yark, 1975. 5. Krautkramer, J and Krautkramer H., Ultrasonic Testing of Materials, Narosa Publishing House,
New Delhi, 4th edition 1993.
ICE5012 BIO MEDICAL INSTRUMENTATION L T P C
3 0 0 3 PRE-REQUISITE: EIE201, EIE281, EIE303 COURSE OBJECTIVES :
• This course gives knowledge of the principle of operation and design of biomedical instruments. It attempts to render a broad and modern account of biomedical instruments.
• It gives the introductory idea about human physiology system which is very important with respect to design consideration
• Understand the functional components of various instruments • Suggest a range of methods which are used to diagnose, monitor or manage conditions.
COURSE OUTCOME: CO1: Students will have a clear knowledge about human physiology system. CO2: They will have knowledge of the principle operation and design and the background of biomedical instruments and specific applications of biomedical engineering. CO3: Electrical safety: physiological effects of electricity, macro- and microshock hazards, protection, electrical safety codes and standards CO4: Measurement of flow and volume of blood CO5: Describe situations when CT imaging is preferred to MRI imaging. BASIC CONCEPTS OF BIO MEDICAL INSTRUMENTATION Terminology – Generalized medical instrumentation system – Measurement constrains – Classification – Interfacing and modifying inputs – Bio statistics – Static and dynamic characteristic – Regulation of medical devices – Electrical safety in medical environment BASIC SENSORS AND SIGNAL PROCESSING Displacement measurements – Resistive sensors – Bridge circuits – Inductance - capacitance and piezo electric sensor – Temperature measurements – Thermocouples – Radiation thermometry – Fiber optic temperature sensors – optical measurements – op-amp circuits – Phase sensitive demodulation –
M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
23
Oscillographic - galvanometric and potentiometric recorders – Microcomputers in bio medical instrumentation BIO POTENTIALS AND MEASUREMENTS Electric activity and excitable cells – Functional organization of peripheral nervous system – ENG – EMG – ECG - EEG and ERG (Electro Retino Graphy) – Bio-potential electrodes – Electrolyte interface - Polarization – Body surface recording electrodes – Electrodes for electric simulation of tissues – Practical hints for using electrodes – Bio potential amplifiers BLOOD PRESSURE, FLOW AND SOUND MEASUREMENT Direct and indirect blood pressure measurement and analysis – Bandwidth requirement – Typical waveforms – Phonocardiography – Tonometry – Electromagnetic and ultrasonic flow meters – Photo plethysmography- Vector Cardiography CLINICAL MEASUREMENT AND IMAGING SYSTEMS Respiratory instruments – Transducers – spirometers - pulmonary measurements and instruments – Oxymeter – Laser application in medicines – Pulsed ruby - Nd Yag - Argon and Carbon-dioxide lasers – X-ray machines – Fluoroscopic machines- thermogram equipments – Ultrasonic imaging – Scanning methods and applications – Image evaluation and processing in medical field – Artificial assist devices REFERENCES 1. Khandpur R. S., Handbook of Biomedical Instrumentation, Tata McGraw Hill Publication
Company, 2004 2. All Evans, The Evaluation of Medical Images, Adam Hilger publication, 1981 3. Dean D. E. Marre A., Bio electronic Measurements, Prentice Hall, 1983 4. John G. Webster, Medical Instrumentation Application and Design, John Wiley and Sons, 1999 5. Cromwell. L. Fred J. Webbell, Bio medical Instrumentation and Measurements, Prentice Hall,
1995
ICE5015 OPTIMAL AND ADAPTIVE CONTROL L T P C
3 0 0 3 PRE-REQUISITE To provide a knowledge of existing algorithms for adaptive control, with a basic understanding of their stability properties and of how to implement them. COURSE OBJECTIVE: • To introduce the theory of optimal control and its applications. • To provide knowledge of dynamic optimization • To deal with design optimal control system COURSE OUTCOME: Upon the successful completion of course student can be able to: CO1: Apply optimal control concepts to systems. CO2: Use dynamic optimization techniques to controllers. CO3: Design optimal control algorithms for real time systems. CO4: Understand the adaptive controller strategy PROBLEM FORMULATION

M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
24
Mathematical model – Physical constraints - Performance measure optimal control problem - Performance measures for optimal control problem - Selection a performance measure DYNAMIC PROGRAMMING Optimal control law – Principle of optimality - An optimal control system - A recurrence relation of dynamic programming – computational procedure - Characteristics of dynamic programming solution - Hamilton – Jacobi – Bellman equation - Continuous - linear regulator problems CALCULUS OF VARIATIONS Fundamental concepts – Functional - Piecewise – smooth externals constrained extrema VARIATIONAL APPROACH TO OPTIMAL CONTROL PROBLEMS Necessary conditions for optimal control – Linear regulator problems - Linear tracking problems - Pontryagin’s minimum principle and state inequality constraints ADAPTIVE CONTROL-CLASSIFICATION MRAC systems – Different configuration – classification - mathematical description – direct and indirect MRAC – self tuning regulator – different approach to self tuning - recursive parameter estimation - implicit and explicit STR - MATLAB toolbox REFERENCES 1. Donald E. Kirk, Optimal Control Theory: An Introduction, Prentice-Hall networks series, 1970 2. Chalam V. V, Adaptive control systems Marcel Dekker, INC New York and Bassel, 1987 3. Anderson .B. D. O, Moore .J. B, Optimal control linear Quadratic methods, Prentice Hall of
India, New Delhi, 1991 4. Sage A. P, White .C. C, Optimum Systems Control, Second Edition, Prentice Hall, 1977 5. Astrom K. J., and Wittenamrk B. Adaptive control, Addison Wesley Publishing Co. USA, 1989
ICE5110 PID CONTROLLER DESIGN L T P C
3 0 0 3 PRE-REQUISITE:
Process control, Sensors and transducers. COURSE OUTCOME: Students will be able to, CO1: Understand the concept of PID controller design. CO2: Design the PID controller using mathematical techniques. CO3: Analyze the robustness of the controller CO4: Design the adaptive control for different process. CO5: Develop the industrial PID controller. INTRODUCTION Feedback fundamentals - PID controller - Two degree freedom controller - Issues related to implementation- integral windup. Stability - sensitivity functions - robustness to process variations - requirements and specifications. PI, PID stabilization – characterization and Computation. PID CONTROLLER DESIGN Z-N and related methods - rule based empirical tuning - pole placement - lambda tuning - algebraic design - optimization methods - robust loop shaping - frequency response methods. IMC based PID tuning. Design for disturbance rejection.
M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
25
ROBUST PERFORMANCE AND PERFORMANCE ASSESSMENT Modeling uncertainty - performance in the presence of uncertainty - robust pole placement - design for robust performance. PID controller performance assessment. ADAPTIVE PID CONTROL Auto tuning - Adaptive Technique-model based methods - rule based methods - Multimodel based PID Controller design - nonlinear PID Controller design. INDUSTRIAL PID CONTROLLER Application to Aircraft control – satellite control – sugar industry – cement industry – power plant. REFERENCES 1. Karl J. Astrom and Tore Haggland, Advanced PID Control, ISA Publications, 2005. 2. Silva. G.J, Aniruddha datta, SP.Bhattacharyya, PID control for time delay systems, Springer,
2005. 3. Antonio Visioli, Practical PID control, Springer, 2010 4. Wang, Z. Ye, W.J. Cai, C.C. Hang, PID control for Multivariable Process, Springer, 2008.
ICE5111 ADVANCED DIGITAL SIGNAL PROCESSING L T P C
3 0 0 3
PRE-REQUISITE: MAT201, EIE206, MAT211 COURSE OBJECTIVES : To familiarise the students with
• The basic concepts and techniques for processing signals on a computer. • Signals, systems, time and frequency domain concepts which are associated with the
mathematical tools. ie fundamental to all DSP techniques. • To provide a thorough understanding and working knowledge of design, implementation,
analysis and comparison of digital filters for processing of discrete time signals. • To study various sampling techniques and different types of filters and will also understand
basic principles of estimation theory. • The most important methods in DSP, including digital filter design, transform-domain
processing and importance of signal processors.
COURSE OUTCOME: Students will be able to, CO1:Analyse and process signals in discrete domain. CO2: Design IIR filters to suit specific requirements for specific applications. CO3: Design FIR filters to suit specific requirements for specific applications. CO4: Compute statistical analysis and inference on random signals. CO5: Design multirate signal processing algorithms to suite specific needs. PARAMETRIC METHODS FOR POWER SPECTRUM ESTIMATION Relationship between the auto correlation and the model parameters – the Yule – Walker method for the AR model parameters – the burg method for the AR model parameters – unconstrained least-squares method for the AR model parameters – sequential estimation methods for the AR model parameters – selection of AR model order – MATLAB toolbox.

M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
26
ADAPTIVE SIGNAL PROCESSING FIR adaptive filters – steepest descent adaptive filter – LMS algorithm – convergence of LMS algorithms – application - noise cancellation – channel equalization – adaptive recursive filters – recursive least squares. MULTIRATE SIGNAL PROCESSING Decimation by a factor D – interpolation by a factor I – filter design and implementation for sampling rate conversion - direct form FIR filter structures – polyphase filter structure. SPEECH SIGNAL PROCESSING Digital models for speech signal - mechanism of speech production – model for vocal tract - radiation and excitation – complete model – time domain processing of speech signal - pitch period estimation – using autocorrelation function – linear predictive coding: basic principles – autocorrelation method – Durbin recursive solution - MATLAB toolbox. WAVELET TRANSFORMS Fourier transform: its power and limitations – short time Fourier transform – the Gabor transform - discrete time Fourier transform and filter banks – continuous wavelet transform – wavelet transform ideal case – perfect reconstruction filter banks and wavelets – recursive multi-resolution decomposition – HAAR wavelet – Daubechies wavelet - MATLAB toolbox. REFERENCES 1. John G.Proakis, Dimitris G.Manobakis, Digital Signal Processing, Principles, Algorithms and
Applications, 4th edition, PHI, 2006. 2. Monson H.Hayes, Statistical Digital Signal Processing and Modeling, Wiley, 2002. 3. Rabiner.L.R and Schaber.R.W, Digital Processing of Speech Signals, Pearson Education (1979). 4. Roberto Crist, Modern Digital Signal Processing, Thomson Brooks/Cole (2004) 5. Raghuveer. M. Rao, Ajit S.Bopardikar, Wavelet Transforms, Introduction to Theory and
applications, Pearson Education, Asia, 2000.
M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
27
ICE5112 PIPING AND INSTRUMENTATION DIAGRAMS
L T P C
3 0 0 3
PRE-REQUISITE:
Knowledge of system transfer function, control action, controllers and final control element is required.
COURSE OBJECTIVES: � To study the basic characteristics of first order and higher order processes. � To get adequate knowledge about the characteristics of various controller modes and
methods of controller tuning. � To study about various complex control schemes. � To study about the construction, characteristics and application of control valves.
COURSE OUTCOME: After the successful completion of the course, the students will be able to:
CO1 – Understand the mathematical modeling, controllers, final control elements and tuning processes. CO2: Apply fundamental knowledge of mathematics to modeling and analysis of fluid flow, level, pressure, temperature problems. CO3: Conduct experiments in pipe flows and open-channel flows and interpreting data from model studies to prototype cases. Documenting them in engineering reports. CO4: Understand the possible disasters caused by an incorrect Design/Analysis in hydraulic, pneumatic engineering system.
FLOW SHEET DESIGN Types of flow sheets - flow sheet presentation - flow sheet symbols - line symbols – designation - process flow diagram - synthesis of steady state flow sheet - flow sheeting software PIPING AND INSTRUMENTATION DIAGRAM EVALUATION AND PREPARATION P and I symbols - line numbering - line schedule - P and I development - various stages of P and ID - P and ID for pumps - compressors process vessels – absorber - evaporator CONTROL SYSTEMS AND INTERLOCKS FOR PROCESS OPERATION Need of Interlock - Types of Interlocks - Interlock for Pumps – Compressor – Heater -Control System For Heater – CSTR - Distillation Column - Expander INSTRUMENT LINE DIAGRAM Line Diagram Symbols - Logic Gates - Representation of Line Diagram APPLICATION OF P AND ID’S Applications of P and ID in Design State - Construction Stage - Commissioning State - Operating Stage Revamping State - Applications of P and ID in Hazaps and Risk Analysis. REFERENCES 1. Ernest E. Ludwig, Applied Process Design for Chemical and Petrochemical Plants, Vol.3, 3rd
edition, Gulf Publishing Company, Houston, 2001 2. Max S. Peters and Timmerhaus, K.D., Plant Design and Economics for Chemical Engineers, 4th
Edition, McGraw Hill Inc., New York, 5th edition,2002 3. Anil Kumar, Chemical Process Synthesis and Engineering Design, Tata McGraw Hill, New
Delhi, 1982
M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
28
4. Westerberg A.N., et al., Process Flow sheeting, Cambridge University Press, New Delhi, 1979
ICE5113 HYBRID COMPUTING USING INTELLIGENT TECHNIQUES
L T P C
3 0 0 3
PRE-REQUISITE: Students are required to be familiar with Basic concepts in controller design and Matrices.
COURSE OBJECTIVES: To learn the design, tuning, and development of ANN &Fuzzy Logic Controllers (FLC) To acquire basic understanding of the various algorithms involved in Neural Networks, Genetic & Fuzzy logic To apply the intelligent controller in process control application. COURSE OUTCOME: Upon the completion of this subject, the student will be able to CO1: Understand the basic intelligent controller concept CO2: Understand concepts of feed forward neural networks and learning and understanding of feedback neural networks. CO3: Understand and analyze the concept of genetic algorithm. CO4: Understand the knowledge of fuzzy logic control. CO5: Apply the knowledge of fuzzy logic control, genetic algorithm and neural network to the real problems. FUZZY SET THEORY Introduction to Neuro – fuzzy and soft computing – fuzzy sets – basic definition and terminology – set-theoretic operations – member function formulation and parameterization – fuzzy rules and fuzzy reasoning – extension principle and fuzzy relations – fuzzy if-then rules – fuzzy reasoning – fuzzy inference systems – Mamdani fuzzy models – Sugeno fuzzy models – Tsukamoto fuzzy models – input space partitioning and fuzzy modeling. NEURAL NETWORKS Biological Neuron - Artificial Neural network – Types of layers- Supervised learning neural networks – perceptions - Adaline – back propagation multilayer perceptions – radial basis function networks – unsupervised learning neural networks – competitive learning networks – kohonen self-organizing networks – learning vector NEURO FUZZY MODELING Adaptive neuro - fuzzy inference systems – architecture – hybrid learning algorithm – learning methods that cross - fertilize ANFIS and RBFN – coactive neuro fuzzy modeling – framework neuron functions for adaptive networks – neuro fuzzy spectrum. OPTIMIZATION Derivative - based optimization – descent methods – the method of steepest descent – classical Newton’s method – step size determination – derivative - free optimization – genetic algorithms – simulated annealing – random search – downhill simplex search- Evolution algorithms – Swarm algorithm. APPLICATIONS OF COMPUTATIONAL INTELLIGENCE Printed character recognition – inverse kinematics problems – automobile fuel efficiency prediction – soft computing for color recipe prediction.
M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
29
REFERENCES 1. Jang.J.S.R, Sun.C.T and Mizutani.E, Neuro-Fuzzy and Soft Computing, PHI, 2004, Pearson
Education 2004. 2. Timothy J.Ross, Fuzzy Logic with Engineering Applications, McGraw-Hill, 3rd edition, 2010. 3. Jack M. Zurada, Introduction To Artificial Neural Systems, Jaico Publishing House, 1999. 4. Davis E.Goldberg, Genetic Algorithms: Search, Optimization and Machine Learning, Addison
Wesley, N.Y., 1989. 5. S. Rajasekaran and G.A.V.Pai, Neural Networks, Fuzzy Logic and Genetic Algorithms, PHI,
2003. 6. R.Eberhart, P.Simpson and R.Dobbins, Computational Intelligence - PC Tools, AP Professional,
Boston, 1996.
ICE5114 ADVANCED SENSOR TECHNOLOGY L P
3 0 0 3 PRE-REQUISITE:
a. Fundamentals of Basic Engineering b. Basic Knowledge in measurements c. Basic Idea about sensors
COURSE OBJECTIVES: To learn about c. Measurement Systems d. Working and applications of Various Transducers
COURSE OUTCOME: After successful completion of the course students can be able to: CO1: Understand the application of different chemical sensors for chemical process industry. CO2: Apply the principles of optic fiber system and mode of light transfer to the various applications. CO3: Apply the different sensors to the various biomedical applications. CO4: Understand the different type of electrodes and its usage. CHEMICAL SENSORS Physical Sensors – Surface Micro Machined Capacitive Pressure sensor - Integrated flow sensor - Chemical and Biochemical Sensors – Conductivity sensor- Hydrogen Sensitive MOSFET - Tri-Oxide Sensors - Schottky diode type sensor - Solid Electrolyte - Electrochemical Sensors - Sensor Matrix for Two dimensional measurement of concentrations OPTICAL SENSOR Holography - Echolocation and bio holography - Sensors used in space and environmental applications - Application in meterorology - natural resources application sensor used in Instrumentation methods BIOMEDICAL SENSORS Biological Sensors in Human Body – Different types of Transducer system – Physiological Monitoring – chemo receptors – Hot and cold receptors – sensors for smell – sound - vision taste - Cardiovascular measurements and devices. ELECTRODES PH –EEG – ECG – EMG - Bio sensors – Plethysmography - Instruments based on knot of sound - Ultrasonic Transducers for Measurement and therapy – radiation detectors – NIR spectroscopy – NMR –Spectroscopy- MRI

M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
30
ADVANCED SENSOR DESIGN Sensor design a sensor characteristics - Design of signal conditioning devices for sensors - Design of 2 and 4 wire transmitters with 4–20 mA output - Pressure Sensor using SISI bonding - Catheter pressure sensors - TIP pressure sensors - High pressure sensors - Silicon accelerometers - Aerospace Sensor - Gyroscope laser and fibre optic gyroscopes- accelerometers - Laser- Aerospace application of laser- Resolvers – Altimeters - Angle of attack sensors - servos REFERENCES 1. Sabaree Soloman, Sensors Hand Book, McGraw Hill , 2nd edition, 2009. 2. Carr and Brown, Introduction to Medical Equipment Technology, Addison Wesley, 1999 3. Smith H. M. Principles of Holography, John Wiley and Sons, New York, 1976 4. Webster.J.G, Medical instrumentation Application and Design, Houghton Mifilin Co. 5. Culshaw.B and Dakin J (Eds), Optical Fibre Sensors, Vol. 1 and 2 Artech House, Norwood, 1989 6. Garnell.P, Guided Weapon Control Systems, Pergamon Press, 1980
ICE5115 NETWORK AND DISTRIBUTED CONTROL SYSTEMS
L P
3 0 0 3 COURSE OUTCOME: After the successful completion of the course, the students will be able to: CO1: Understand the basic principle of communication and the modes of data transmission CO2: Understand the various types of bus devices used for data communication in industry. CO3: Understand the basics of distributed control system. . CO4: Analyze the interfacing devices used in DCS CO5: Use and calibrate the HART system for different applications. DATA NETWORK FUNDAMENTALS Network hierarchy and switching – Open system interconnection model of ISO – Data link control protocol – BISYNC – SLDC – HLDC – Media access protocol – Command – Token passing – CSMA/CD – TCP/IP. INTERNETWORKING Bridges –Routers – Gateways – Open system with bridge configuration – Open system with gateway configuration – Standard ETHERNET and ARCNET configuration – Special requirement for networks used for control. DISTRIBUTED CONTROL SYSTEM Evolution – Architectures – Comparison – Local control unit – Process interfacing issues – Communication facilities. INTERFACES IN DCS Operator interfaces – Low level and high level operator interfaces – Operator displays – Engineering interfaces – Low level and high level engineering interfaces – General purpose computers in DCS. HART AND FIELD BUS Evolution of signal standards – HART communication protocol – Communication modes – HART networks – Control system interface – HART and OSI model – Filed bus introduction – General field bus architecture – Basic requirements of field bus standard – Field bus topology – Inter operability. REFERENCES 1. A.S. Tanenbaum, ‘Computer Networks’, 3rd Edition, Pearson Education, 1996 / PHI. 2. Michael P. Lukas, ‘Distributed Control System’, Van Nostrand Reinhold Co., Canada, 1986. 3. G. K. McMillan, ‘Process/Industrial Instruments Hand book’, Tata McGraw Hill, New York, 1999.
M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
31
4. Romily Bowden, ‘HART application Guide and OSI communication Foundation’, 1999. 5. W. Buchanan, ‘Computer Buses’, Arnold Publishers, London, 2000.
ICE6006 MICRO CONTROLLER BASED SYSTEM DESIGN L T P C
3 0 0 3 COURSE OBJECTIVES: 1. To learn the Architecture, addressing modes and instruction set of micro controller. 2. To learn the programming concepts of microcontroller. COURSE OUTCOMES: After going through this course the student will be able to CO1: understand the role of micro controller in industrial applications. CO2: Understand the basic resources needed for microcontroller. CO3. Design and implement microcontroller based systems. CO4:Understand the Hardware and software interaction and integration MOTOROLA MICROCONTROLLER Instructions and addressing modes of 68hc11 – operating modes – hardware reset, Interrupt system – parallel i/o ports – flats – real time clock – programmable timer – Pulse accumulator – serial communication interface – analog to digital converter – Hardware expansion – basic assembly language programming. ARM CONTROLLER Architecture – memory organization – pipeline and cache concepts – ARM (32 bit) Architecture - instruction set and assembly language programming - ARM instruction Set and thumb instruction set - switching between arm and thumb instructions. PIC MICROCONTROLLER Architecture – memory organization – addressing modes – instruction set – PIC Programming in assembly & C –I/O port, data conversion - RAM & ROM allocation - timer Programming - µp-lab. PERIPHERAL OF PIC MICROCONTROLLER Timers – interrupts, I/O ports- I2C bus-A/D converter-UART- CCP modules -ADC, DAC and sensor interfacing –flash and EEPROM memories. SYSTEM DESIGN – CASE STUDY Interfacing LCD display – keypad interfacing - generation of gate signals for converters and inverters - motor control – controlling AC appliances –measurement of frequency - Stand alone data acquisition system. REFERENCES 1. Muhammad Ali Mazidi, Rolin D. Mckinlay, Danny Causey ‘ PIC Microcontroller and Embedded
Systems using Assembly and C for PIC18’, Pearson Education 2008 2. Myke Predko, “Programming and customizing the 8051 microcontroller”, Tata McGraw Hill
2001. 3. John B. Peatman, Design with PIC Micro controller, Pearson Education, 2003. 4. Steave Furber, ARM system – on – chip architecture, Addison Wesley, 2000.
M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
32
ICE6011 FAULT DIAGNOSIS AND CONTROL SYSTEM
L T P C
3 0 0 3
COURSE OUTCOME: Upon the successful completion of the course the students can be able to: CO1: Understand the different Fault Detection and Diagnosis methods CO2: Design and detect sensor and actuators faults using structured residual approach as well as directional structured residual approach CO3: Design and detect faults in sensor and actuators using GLR and MLR based Approaches CO4: Understand various types of fault tolerant control schemes such as Passive and active approaches CO5: Detect and quantify and compensate stiction in Control valves INTRODUCTION Introduction- definition for fault -fault detection and diagnosis - process monitoring Procedures - process monitoring measures-monitoring MULTIVARIATE STATISTICS AND PATTERN CLASSIFICATION Data pre-treatment-univariate statistical monitoring-T2 statistic- threshold for T2 statistic- Data requirement- Discriminant analysis- feature DATA DRIVEN METHODS Principal component analysis- reduction order-fault detection – identification – diagnosis - Dynamic PCA and other methods- fisher discriminant analysis- partial least squares- Canonical variate analysis ANALYTICAL AND KNOWLEDGE-BASED METHODS Fault description- parameter estimation- observer based methods- parity relations- casual Analysis - expert system- pattern- combination of various techniques APPLICATIONS Tennessee Eastman process- application description - case studies results and discussion- Fault Diagnosis-Control valve- centrifugal pump – DC motor. REFERENCES 1. Chiang.L.H, Russell.E.L and Braatz.R.D, Fault Detection and Diagnosis in Industrial Systems,
Springer, 2000. 2. George Vachtsevanos, Frank L.Lewis, Michael Roemer, Andrew Hess, Intelligent Fault
Diagnosis and Prognosis for Engineering Systems, Wiley, 2006s, 1987. 3. Computational Intelligence in Fault Diagnosis(Advanced Information and Knowledge
Processing) Springer, 2006. 4. Krzysztof Patan, Artificial Neural Networks for Modelling and Fault Diagnosis of Technical
Processes, Springer, 2008-07.
ICE6101 MULTI-VARIABLE CONTROL SYSTEM L T P C
3 0 0 3

M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
33
PRE-REQUISITE To provide sound knowledge on the principles of discrete data control system COURSE OBJECTIVES: To understand the basics of Z- Transform To study the stability analysis of digital control system To equip the basic knowledge of digital process control design To study about multivariable control system. COURSE OUTCOMES: Student can be able to: CO1: Understand the state and state variable of the system CO2: Analyze the linear system using state space analysis. CO3: Students will have the knowledge of Z- Transform CO4: Design and compensate the digital control system. CO5: Understand the different types of multivariable control for different applications. REVIEW OF SYSTEMS Review of first and higher order systems - closed and open loop response - Response to step - impulse and sinusoidal disturbances - Control valve types – linear - equal percentage and quick opening valve - Design of valves - Transient response - Block diagrams. CLASSIFICATION OF LINEAR CONTROLLABLE SYSTEMS Autonomous systems - discrete and periodic systems - stabilization controllability and observability of linear autonomous systems - Controllability and observability conditions of linear autonomous systems - observing the state of a linear system. DISCRETE TIME SYSTEMS Reachability and constructability - some examples to discuss the above fundamentals - representation of non controllable realizations- minimal realizations SPECIAL CONTROL TECHNIQUES Advanced control techniques – cascade – ratio - feed forward - adaptive control - selective controls - computing relays - simple alarms - Smith predictor - internal model control- theoretical analysis of complex processes. MULTIVARIABLE CONTROL Analysis of multivariable systems – Interaction - examples of storage tanks - Review of matrix algebra - Bristol arrays - Niederlinski index - Tuning of multivariable controllers. REFERENCES 1. Coughanour.D.R, ‘Process Systems analysis and Control’,Mc.Graw Hill, II Edition, 2011. 2. Seborg.D.E, Edger.T.F, and Millichamp.D.A, John Wiley and Sons ‘Process Dynamics and
Control’, , II Edition, 2004. 3. Wonham.W.M, Multivariable Control System 4. Sinha.K.N, Multivariable Control Marcel Dekker Inc., New York
M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
34
COURSE OBJECTIVES: To understand how to apply statistical process control concepts to different processes COURSE OUTCOME: After completion of the course, the student should be able to CO1: understand how to identify processes and implement different control algorithms for efficient control. CO2: Understand why the variation happened in the measurement. CO3: Select and analyze the control charts for different applications. CO4: Understand the process capability and analyze it. HISTORY OF STATISTICAL PROCESS CONTROL Quality and quality management techniques - basic principles of statistics and probabilities (application of set theories and modern methods of determination of probabilities) - normal- student’s - Tx2 (chi-square) - exponential and Poisson’s distributions - Hypothesis Testing- concept of type I and II error - sampling techniques. VARIATION Accuracy-Precision -The Standard Deviation-Calculating the Standard Deviation - The Excel Formula-The Histogram-Accuracy and Precision Example-The Normal Distribution- The Bell Shaped Curve -Calculating the Area -Normal Distribution Tables Examples I PARAMETER SELECTION TO CONTROL A PROCESS Different types of control charts- preparation of control charts for variables (X and R bar charts) - control charts for attributes (P and NP-chart, C-chart, U-chart) - general patterns of plots to determine the assignable causes- control charts for standard deviation and mean- control charts for individual items- trend chart- moving average control chart- cumulative control chart- acceptance control chart INTRODUCTION TO PROCESS CAPABILITY Specification and control limits - natural tolerance limits - process capability indices - process capability analysis procedure - setting tolerances on assemblies and components - estimation of natural tolerance INTRODUCTION TO ACCEPTANCE SAMPLING Producer’s and consumer’s risk - O.C curve - types of sampling plans - sampling plans for continuous production - lot by lot attribute sampling plans - variable sampling plans for a process parameter. REFERENCES 1. David S. C., Understanding statistical process control, SPC PRESS, second edition,1992 2. Leonard A Doty, Statistical Process Control, 2nd Edition 1996 3. Robat L. Maron, John C. Young, Multivariate statistical Process Control with industrial
applications, 2004. 4. Donald J. W., Advanced Topics in Statistical Process Control: The Power of Shewhart's Charts,
SPC PRESS (Statistical Process Control); 2 edition, 2004. 5. William A. L., Statistical Process Control for Real-World Applications, CRC Press; Har/Com
edition, 2010
ICE6102 STATISTICAL PROCESS CONTROL L T P C
3 0 0 3

M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
35
COURSE OBJECTIVES: The objective of this course is to expose students to different system identification concepts. COURSE OUTCOME: Upon completing the course, the student should have understood CO1: The concepts required for development of mathematical models for industrial systems. CO2: Development of models from first principles. CO3: Development of data driven models SYSTEMS AND MODELS Models of LTI systems - Linear Models - State space Models - Model sets - Structures and Identifiability - Models for Time-varying - Non-linear systems - Models with Nonlinearities – Non-linear state - space models - Black box models - Fuzzy models - Model approximation – validation - Random Process Modeling PARAMETRIC AND NON-PARAMETRIC ESTIMATION METHODS Transient response - Correlation Analysis – Frequency response analysis – Spectral Analysis – Least Square – Recursive Least Square – Maximum Likelihood – Instrumental Variable methods – Pseudo Linear Regression LINEAR AND NON-LINEAR ESTIMATION TECHNIQUES Open - Closed loop identification - Approaches – Direct - indirect identification – Joint input - output identification – Non-linear system identification – Wiener models using MATLAB – Power series expansions - Multidimensional Identification – State estimation techniques – FFT based - Model based Spectral estimation techniques Multi variable system identification Multivariable Model-Based Process Control - MIMO Models - Models of Signals - Asymptotic Method; MIMO Case - MIMO Version of the Asymptotic Theory - More on Order/Structure Selection - Model Validation - Identifying the Glass Tube Drawing Process - Industrial Case Studies Subspace Model Identification of MIMO Processes Introduction - Definition of the State Space Identification Problem - state space bases and model reduction - Stochastic Identification - Subspace Identification using Generic Input Signals - Analysis of Step Response Measurements - Treatment of Additive Perturbations - Applications of subspace Identification in Process Control. REFERENCES 1. Ljung, System Identification Theory for the User, PHI, 1987 2. Oliver Nelles, Nonlinear Systems, Springer ,2001. 3. Multivariable System Identification for Process Control , Y.Zhu , Elsevier Science & Technology
Books, 2001
ICE6103 SYSTEM IDENTIFICATION L T P C
3 0 0 3
M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
36
4. Subspace Identification For Linear Systems, theory – implementation – applications, peter van overschee, bart de moor, kluwer academic publishers, Belgium.
5. Subspace Methods for System Identification, Tohru Katayama , Springer-Verlag London Limited 2005
ICE6104 REMOTE SENSING AND CONTROL
L T P C
3 0 0 3 PREREQUISITE: Radiation theory, Digital control & Remote sensing. COURSE OUTCOME: CO1: Understand the basics of remote sensing. CO2: Analyze the electromagnetic radiation for different applications. CO3: Classify the different digital information for different applications. CO4: Understand the basics of Remote control CO5: Apply the digital information on remote sensing applications. BASIC CONCEPTS OF REMOTE SENSING Idealized remote sensing system - Physics of remote sensing - electromagnetic spectrum - black body concept - atmospheric windows – geometry of scanners - CCD arrays and platforms - history of space imaging characteristics of space platform like LANDSAT, SPOT, IRS, etc - Characteristics of sensors like MSS, TM - LISS I and LISS II Outputs from various sensors. ELECTROMAGNETIC RADIATION Classification and nature – spectral - spatial and temporal characteristics of objects - Atmospheric interaction sensors: Photographic – thermal - multi-spectral - passive microwave and active microwave sensors. Ground data acquisition: Photo-interpretation, image processing techniques, remote sensing applications. CLASSIFICATION OF DIGITAL DATA AND INFORMATION Supervised – unsupervised - Extractionprocedure for different applications and terrain evaluation – Thematic interpretation - transfer of interpreted thematic information to base map – Ground verification. TECHNIQUES OF REMOTE CONTROL Remote control in industry including oil pipelines - rocket motion and satellite movements - Aerial photography and photogrammetry: basic principles - photographic systems - visual interpretation and mapping - Ground truth verification radiometer and its application. APPLICATION OF REMOTE SENSING Civil Engineering- Earth Science- Forestry- Agriculture- Oceanography- Fisheries- Water resources- Town planning and land use/land cover mapping – GIS - application REFERENCES 1. Lille sand and Kiefer, Remote sensing and image interpretation, John Wiley and Sons 2. Floyd F. Sabins, Remote sensing principles and interpretation - WH Freeman and Co. 3. George Joseph, Fundamentals of Remote Sensing- Universities Press-Technical 4. Narayan L R A, Remote Sensing and its Applications - Universities Press-Science/Reference
M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
37
5. Gupta - Remote Sensing Ecology, 2nd edition, Springer, 2005 6. Jensen - Remote Sensing of the Environment, Pearson, 2003 7. Barett, E.C. and Curtis, L.F. Introduction to Environmental Remote Sensing, 3/e, Chapman Hall,
NewYork 1992. 8. Lo, C.P. Applied Remote Sensing, Wiley, New York 1986.
ICE6105 WIRELESS SENSOR NETWORKS
L T P C
3 0 0 3 COURSE OBJECTIVES: To introduce the technologies and applications for the emerging domain of wireless sensor networks, To impart knowledge on the design and development of the various layers in the WSN protocol stack To elaborate the various issues related to WSN implementations To familiarize the students with the hardware and software platforms used in the design of WSN COURSE OUTCOMES The students can be able to: CO1: Ability to analyze WSN with respect to various performance parameters in the protocol stack CO2: Ability to understand MAC algorithms and Network protocols used for specific WSN applications CO3: Design and develop a WSN for a given application INTRODUCTION TO WIRELESS SENSOR NETWORKS Introduction to the Concepts of sensor network – Applications – sensors - Challenges for Wireless Sensor Networks - Characteristics requirements - required mechanisms - Difference between mobile AD-HOC and sensor networks - Enabling Technologies for Wireless Sensor Networks.
NETWORK ARCHITECTURE Wireless Sensor Network architecture - Typical network architectures - Data relaying strategies - Aggregation - Role of energy in routing decisions - Single-Node Architecture - Hardware and software components of a sensor node - Tiny OS operating system - Sensor Network Scenarios - Optimization Goals and Figures of Merit - Gateway Concepts.
PHYSICAL LAYER AND LINK LAYER Wireless channel and communication fundamentals - Physical layer and transceiver design Considerations in WSNs - Contention-based protocols - Schedule-based protocols - The IEEE 802.15.4 MAC protocol - Error control – Framing - Link management.
ROUTING PROTOCOLS AND LOCALIZATION Routing Protocols- Energy-Efficient Routing- Geographic Routing- Introduction to Time Synchronization- L o c a l i z a t i o n Single- hop localization- Multi –hop localization Properties of positioning- Sensor Tasking and Control. SENSOR NETWORK PLATFORMS AND TOOLS Sensor Network Platforms and Tools- Sensor node hardware- Programming challenges- Node Level software platform- Node level simulators- Programming beyond individual nodes- Security- Privacy issues - Attacks and countermeasures. REFERENCE 1. Holger Karl, Andreas Willig, “Protocols and Architectures for Wireless Sensor Networks”,
Whiley publications, 2007

M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
38
2. Feng Zhao and Leonidas J. Guibas, “Wireless Sensor Networks - A Information Processing Approach", Elsevier, 2007.
3. Mohammad Ilyas and Imad Mahgaob,”Handbook Of Sensor Networks: Compact Wireless and Wired Sensing Systems”, CRC Press, 2005.
4. Wayne Tomasi, “Introduction To Data Communication and Networking”, Pearson Education, 2007.
5. Kazem Sohraby, Daniel Minoli, and Taieb Znati, “Wireless Sensor Networks- Technology, Protocols, and Applications”, John Wiley, 2007
6. Bhaskar Krishnamachari, ”Networking Wireless Sensors”,Cambridge Press,2011
ICE6106 POWER PLANT AUTOMATION
L T P C
3 0 0 3 PRE-REQUISITE:
Knowledge of sensors and basic control system.
OBJECTIVES:
To provide adequate knowledge in a modern power generation plant. COURSE OUTCOME: Student will be able to
CO1: Know the concept of different methods of power generation with a particular stress on thermal power generation. CO2: Know the various measurements involved in power generation plants. CO3: Gain knowledge about the different types of devices used for analysis. CO4: Impart knowledge about the different types of controls and control loop. CO5: Familiarize the methods of monitoring different parameters like speed, vibration of turbines and their control OVERVIEW OF POWER GENERATION Brief survey of methods of power generation – Hydro, thermal, nuclear, solar and wind power – Importance of instrumentation in power generation – Thermal power plants – Block diagram – Details of boiler processes - UP and I diagram of boiler – Cogeneration MEASUREMENTS AND ANALYSERS IN POWER PLANTS Electrical measurements – Non electrical parameters – Steam pressure and steam temperature – Drum level measurement – Radiation detector – Smoke density measurement – Dust monitor-Flue gas oxygen analyzer – Analysis of impurities in feed water and steam – Dissolved oxygen analyzer – Chromatography – pH meter – Fuel analyzer – Pollution monitoring instruments. BOILER /TURBINE -MONITORING AND CONTROL LOOPS Combustion control – Air/fuel ratio control – Furnace draft control – Drum level control – Main stream and reheat steam temperature control – Deaerator control – DCS in power plants – Interlocks in boiler operation- Speed, vibration, shell temperature monitoring and control – Steam pressure control – Lubricant oil temperature control – Cooling system. AUTOMATION STRATEGY
M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
39
Programmable logic controllers (PLCs)- Interfacing PLCs to equipment-PCs and networks-Levels of industrial control-Network communications for plant automation-Cell control by PLC networks- Automation strategies- semi-automated-autonomous- Introduction to distributed control system(DCS) - DCS versus PLCs - Safety issues. CASE STUDY Steel plant automation - Automation Technology- Improving Power Plant Performance - co-generation in Sugar plant - case study on automation testing- waste water treatment plant. REFERENCES 1. Sam G. Dukelow, ‘The Control of Boilers’, Instrument Society of America, 1991. 2. P.K. Nag, ‘Power Plant Engineering’, Tata McGraw Hill, 2001. 3. S.M. Elonka and A.L. Kohal, ‘Standard Boiler Operations’, Tata McGraw Hill, New Delhi, 1994. 4. R.K.Jain, ‘Mechanical and Industrial Measurements’, Khanna Publishers, New Delhi, 11th
edition, 2009. 5. E.Al. Wakil, ‘Power Plant Engineering’, Tata McGraw Hill, 1984.
ICE6107 EMBEDDED SYSTEM DESIGN L T P C
3 0 0 3 COURSE OUTCOME: After successful completion of the course the students can be able to: To provide a clear understanding on the basic concepts, Building Blocks for Embedded System CO1: Understand the fundamentals of System design with Partioning CO2: Design the embedded program for Process development Environment CO3: Analyze features of embedded system for target configuration CO4: Understand the BDM, JTAG, and Nexus &Testing of embedded system INTRODUCTION Embedded design life cycle – product specification – hardware / software partitioning - detailed hardware and software design – integration - product testing. SELECTION PROCESS AND PARTIONING DECISION Selection processes– Performance – Measuring tools - Meaningful bench marking- RTOS availability- tool chain availability- other issues in selection processes partitioning decision – hardware / software duality- coding hardware – application specific integrated circuit revolution – managing the risk- co-verification. DEVELOPMENT ENVIRONMENTS Execution environment- memory organization- system startup – hardware manipulation – memory- mapped access- speed and code density Software techniques - Interrupt service routines – watch dog timers – flash memory basic toolset – host and debugging – remote debugging – read only memory emulators- logic analyzer. INCIRCUIT EMULATORS BDM, JTAG, and Nexus – Background debug mode – ICE - Bullet proof run control – real time trace, hardware break points – timing constraints – triggers setting. TESTING
M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
40
Testing- bug tracking- reduction of risks and costs – performance – unit testing- regression testing- choosing test cases – functional tests- coverage tests- testing embedded software. REFERENCES 1. Arnold S. Berger, Embedded System Design CMP books, USA 2002. 2. Wayne Wolf, Computers as Components: Principles of Embedded Computer Systems Design,
Morgan Kaufman Publishers, 2008. 3. Jean J. Labrosse Embedded Systems Building Blocks: Complete and Ready-To- Use Modules in
C, CMP Books, 2005. 4. David E. Simon, An Embedded Software Primer, Perason education, 2003.
ICE6108 MEMS AND NANOTECHNOLOGY L T P C
3 0 0 3 COURSE OBJECTIVE: 1. Acquire knowledge about present MEMS device and their application. 2. Understanding the principle laws of physics and chemistry employed in the fabrication of MEMS devices. 3. Understand different fabrication techniques like micro-machining, etching etc. 4. Study the electronic interface and software design tools for MEMS devices. COURSE OUTCOMES: CO1: Apply fundamental knowledge of mathematics, physics and chemistry to analyze practical micro-systems. CO2: Experimenting with software simulation designs (in teams) and exploring the advantages of working on multi-physics tool for creating a blueprint for MEMS device, as well as documenting them in engineering reports. CO3: Understand the pivotal role of electronics for developing an MEMS device. CO4: Apply these techniques for development of MEMS for specific applications. INTRODUCTION Historical background - development of microelectronics – evolution of micro sensors – mems - emergence of micro machines – electronic materials – processing – introduction - electronic materials – their deposition - pattern transfer - etching electronic materials – doping semiconductors MEMS MATERIALS AND PROCESSING Overview, metals – semiconductors – ceramic - polymeric - composite materials - Silicon micro machining – bulk- etch-stop techniques - dry etching - buried oxide process - silicon fusion bonding - anodic bonding SILICON MICRO MACHINING Surface - sacrificial layer technology - material systems in sacrificial layer technology - plasma etching - combined IC technology - anisotropic wet etching. MICRO SENSORS Thermal sensors - radiation sensors - mechanical sensors – magnetic sensors - biochemical sensors - flow sensors - SAW devices – saw devices development - history, transducers in SAW devices - acoustic waves NANOTECHNOLOGY

M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
41
Scientific revolutions - types of nanotechnology – nanomachines - nano materials – atomic structure surfaces - dimensional space - molecular nanotechnology - nanopowders – nanomaterials - preparation and applications REFERENCES 1. Simon Sze, Semiconductor Sensors, John Wiley and Sons, Inc., New Delhi., 1994 2. Elwenspoek, M. and Wiegerink.R., Mechanical Microsensors, Springer-Verlag Berlin
Heidelberg, 2001 3. Poole, P. and Frank J. Owens., Introduction to NanoTechnology., John Wiley and Sons., INC.,
2003 4. Bharat Bhushan, Hand Book of Nano technology, Springer Publication., 1st edition, 2004 5. Julian W. Gardner and Vijay K. Varadan, Microsensors, Mems, and Smart Devices, John Wiley
and sons ltd., New Delhi, 2001 6. Massood Tabib-azar, microactuators - electrical, magnetic, thermal, optical, mechanical, chemical
and smart structures, kluwer academic publishers, New York, 1997
PREREQUISITE
Coding theory COURSE OUTCOME: After successful completion of the course the students can be able to: CO1: Understand the basic concept of information theory. CO2: Develop the coding using text, audio & speech. CO3: Develop the coding using video. CO4: develop error control code using block code. CO5: develop error control code using convolutional code. INFORMATION THEORY Information – Entropy, Information rate, classification of codes, Kraft McMillan inequality, Source coding theorem, Shannon-Fano coding, Huffman coding, Extended Huffman coding - Joint and conditional entropies, Mutual information - Discrete memoryless channels – BSC, BEC – Channel capacity, Shannon limit. SOURCE CODING: TEXT, AUDIO AND SPEECH Text: Adaptive Huffman Coding, Arithmetic Coding, LZW algorithm – Audio: Perceptual coding, Masking techniques, Psychoacoustic model, MEG Audio layers I,II,III, Dolby AC3 - Speech: Channel Vocoder, Linear Predictive Coding SOURCE CODING: IMAGE AND VIDEO Image and Video Formats – GIF, TIFF, SIF, CIF, QCIF – Image compression: READ, JPEG – Video Compression: Principles-I,B,P frames, Motion estimation, Motion compensation, H.261, MPEG standard ERROR CONTROL CODING: BLOCK CODES
ICE6109 INFORMATION CODING THEORY
L T P C
3 0 0 3
M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
42
Definitions and Principles: Hamming weight, Hamming distance, Minimum distance decoding - Single parity codes, Hamming codes, Repetition codes - Linear block codes, Cyclic codes - Syndrome calculation, Encoder and decoder - CRC ERROR CONTROL CODING: CONVOLUTIONAL CODES Convolutional codes – code tree, trellis, state diagram - Encoding – Decoding: Sequential search and Viterbi algorithm – Principle of Turbo coding REFERENCES 1. R Bose, “Information Theory, Coding and Crptography”, TMH 2007 2. Fred Halsall, “Multidedia Communications: Applications, Networks, Protocols and Standards”,
Perason Education Asia, 2002 3. Amitabha Bhattacharya, “Digital Communication”, TMH 2006 4. K Sayood, “Introduction to Data Compression” 3/e, Elsevier 2006 5. S Gravano, “Introduction to Error Control Codes”, Oxford University Press 2007
ICE6110 MACHINE VISION AND APPLICATIONS L T P C
3 0 0 3 PRE-REQUISITE: Virtual Instrumentation, Communication, Image processing. COURSE OUTCOME: After successful completion of the course the students can be able to: CO1: Understand the basics of machine vision. CO2: Acquire the image signal and from digital camera CO3: Process the image signals with the techniques available CO4: Analyze the extracted image information. CO5: Apply the image processing technique to various applications. INTRODUCTION Human vision – Machine vision and computer vision – benefits of machine vision – Block diagram and function of machine vision system implementation of industrial machine vision system. IMAGE ACQUISITION Scene constraints-lighting sources- types and setups – Lighting parameters – working principle – Analog and Digital Cameras – General problem in capturing the image – selection of camera – optics in camera. IMAGE PROCESSING Image formation – filtering technique – Pixel processing – Processing of binary and grey scale images – Operators – types – segmentation – edge detection – Morphology. IMAGE ANALYSIS Feature extraction-decision making – pattern recognition – colour image processing – 3D image processing. MACHINE VISION APPLICATION Machine vision applications in manufacturing – electronics – printing – pharmaceutical -textile and Bio medical field - Case studies REFERENCES

M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
43
1. Milan Sonka, Vaclav Hlavac, Roger Boyle, “Image Processing Analysis and machine vision publisher, 1995.
2. Richard.O.Duda, Peter.E.Hurt, Pattern Classification and Scene Analysis Publishers, 2000. 3. Rafael C.Gonzales, Richard.E.Woods, ‘Digital Image Processing Publishers, 3rd Edition, 2007. 4. Nello Zuech, ‘Understanding and Applying Machine Vision Marcel dekker Inc. 2000
PRE-REQUISITE: EIE301,EIE201,EIE306,MAT201,PHY111 COURSE OUTCOME: After the successful completion of the course, the students will be able to: CO1: Understand the different method of calibration and design instruments in industry. CO2: Design for grounding for the circuits and shields. CO3: Understand the concept of safety. CO4: prepare the documentation for industrial projects CO5: Handle the LNG project safety design. SAFETY IN PROCESS DESIGN AND PRESSURE SYSTEM DESIGN Design process – conceptual design and detail design – assessment – inherently safer design chemical reactor – types – batch reactors – reaction hazard evaluation– assessment – reactor safety – operating conditions– unit operations and equipments – utilities. Pressure system – pressure vessel design – standards and codes– pipe works and valves – heat exchangers – process machinery – over pressure protection – pressure relief devices and design – fire relief– vacuum and thermal relief – special situations – disposal – flare and vent systems failures in pressure system. PROCESS PLANT COMMISSIONING AND INSPECTION Commissioning phases and organization – pre–commissioning documents – process commissioning – commissioning problems – post commissioning documentation Plant inspection – pressure vessel – pressure piping system – non destructive testing – pressure testing – leak testing and monitoring – plant monitoring – performance monitoring – condition – vibration – corrosion – acoustic emission – pipe line inspection. PROCESS PLANT MAINTENANCE– MODIFICATION AND EMERGENCY PLANNING Management of maintenance – hazards – preparation for maintenance – isolation – purging – Cleaning – confined spaces – permit system – maintenance equipment – hot works – tank cleaning – repair and demolition – online repairs – maintenance of protective devices – modification of plant – problems – controls of modifications. Emergency planning – disaster planning – onsite emergency – offsite emergency – APELL STORAGES AND TRASPORTATION General consideration – petroleum product storages – storage tanks and vessel – storages layout segregation – separating distance – secondary containment – venting and relief – atmospheric vent – pressure – vacuum valves – flame arrestors – fire relief – fire prevention and protection – LPG storage – pressure storages – layout– instrumentation– vaporizer– refrigerated storages – LNG storages – hydrogen storages – toxic storages – chlorine storages– ammonia storages – other chemical storages – underground storages – loading and unloading facilities– drum and cylinder storage – ware
ICE6111 INDUSTRIAL PROCESS SAFETY
L T P C
3 0 0 3

M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
44
house – storage hazard assessment of LPG and LNG Hazards during transportation – pipeline transport PROCESS PLANT OPERATIONS perating discipline – operating procedure and inspection – format – emergency procedures hand over and permit system – start up and shut down operation – refinery units – operation of fired heaters – driers – storage – operating activities and hazards – trip systems – exposure of personnel. Specific safety consideration for Cement – paper – pharmaceutical – petroleum – petro – chemical – rubber – fertilizer and distilleries. REFERENCES 1. Lees, F.P. “Loss Prevention in Process Industries” Butterworths and Company, 1996. 2. “Quantitative Risk Assessment in Chemical Process Industries” American Institute of Chemical Industries, Centre for Chemical Process safety. 3. Fawcett, H.h. and Wood, “Safety and Accident Prevention in Chemical Operations” Wiley inters, Second Edition. 4. “Accident Prevention Manual for Industrial Operations” NSC, Chicago, 1982. 5. GREEN, A.E., “High Risk Safety Technology”, John Wiley and Sons,. 1984. 6. Petroleum Act and Rules, Government of India. 7. Carbide of Calcium Rules, Government of India.
PREREQUISITE Instrumentation Ethics in Engineering. COURSE OBJECTIVES To create an awareness on Engineering Ethics and Human values. To study the moral issues and decisions confronting individuals and organizations engaged in engineering profession. To study the related issues about the moral ideals, character, policies, and relationships of people and corporations involved in technological activity COURSE OUTCOMES CO1 : Understand the engineering code of ethics and be able to apply them as necessary. CO2 : Understand moral complexities in many engineering activities and decision-making processes CO3 : Understand some of the contemporary issues in the engineering professions CO4 : Effectively communicate their knowledge and understanding of engineering ethics & safety aspects. CO5 : Students learnt the moral issues and moral problems in engineering and how to find the solution to those problems in globaly. HUMAN VALUES Morals, Values and Ethics – Integrity – Work Ethic – Service Learning – Civic Virtue – Respect for Others – Living Peacefully – Caring – Sharing – Honesty – Courage – Valuing Time – Co-operation – Commitment – Empathy – Self-Confidence – Character – Spirituality – Ethical treatment of employees – Ethical treatment of customers. ENGINEERING ETHICS
ICE6112 ETHICS IN INDUSTRIAL AUTOMATION L T P C
3 0 0 3
M.Tech. PROCESS CONTROL AND AUTOMATION REGULATIONS 2011
45
Senses of Engineering Ethics – Variety of Moral Issues – Types of Inquiry – Moral Dilemmas – Moral Autonomy – Kohlberg’s Theory – Gilligan’s Theory – Consensus and Controversy – Professions and Professionalism – Professional Ideals and Virtues – Theories about Right Action – Self-Interest – Customs and Religion – Use of Ethical Theories. ENGINEERING AS SOCIAL EXPERIMENTATION Engineering as Experimentation – Engineers as Responsible Experiments – Codes of Ethics – A Balanced Outlook on Law – One Approach to Management Decision – Making Leadership – The Challenger Case Study. SAFETY, RESPONSIBILITIES AND RIGHTS Safety and Risk in Process Industries – Assessment of Safety and Risk – Risk Benefit Analysis and Reducing Risk – The Three Mile Island and Chernobyl Case Studies – Corporate Social Responsibility – Collegiality and Loyalty – Respect for Authority – Collective Bargaining – Confidentiality – Conflicts of Interest – Occupational Crime – Professional Rights – Employee Rights – Intellectual Property Rights (IPR) – Discrimination. GLOBAL ISSUES Multi-National Corporations – Environmental Ethics – Computer Ethics – Weapons Development – Engineers as Managers – Consulting Engineers – Engineers as Expert Witnesses and Advisors – Moral Leadership – Sample Code of Ethics like ASME, ASCE, IEEE, IETE. References 1. Mike Martin and Roland Schinzinger, Ethics in Engineering, McGraw Hill, New York, 1996. 2. Charles D Fledderman, Engineering Ethics, Prentice Hall, New Mexico, 1990. 3. Laura Schlesinger, How Could You Do That: The Abdication of Character, Courage, and
Conscience, Harper Collins, New York, 1996. 4. Stephen Carter, Integrity, Basic Books, New York, 1996.