k-dimensional coding schemes in hilbert spaces · special case: k-means ... irk!h there is an...
TRANSCRIPT

K-dimensional coding schemes in Hilbert spaces
Massimiliano Pontil
November 9, 2015
1 / 38
Plan
I Problem formulation
I Examples: PCA, K -means clustering, sparse coding,nonnegative matrix factorization, subspace clustering
I Risk bounds
I Application to the above examples
Main reference: A. Maurer and M. Pontil. K-dimensional coding schemes
in Hilbert spaces. IEEE Transactions on Information Theory, 2010
2 / 38
Problem formulation - I
Let H be a Hilbert space and µ a probability measure on H suchthat ‖X‖ ≤ 1 a.s. We want to approximate vectors x ∼ µ as
x ≈ Ty = t1y1 + · · ·+ tKyK
I T : IRK → H is a bounded linear operator (dictionary). IfH = IRp we identify it with a p × K matrix [t1, ..., tK ]. Thevectors tk = Tek are called the dictionary elements
I y = (y1, ..., yK ) ∈ RK is called the codevector and takesvalue in a set Y (codebook)
I The reconstruction error of T on input x is miny∈Y‖x − Ty‖2
Application: H = Rp, µ is a distribution of random patchesextracted from natural images, K may be larger than p
3 / 38
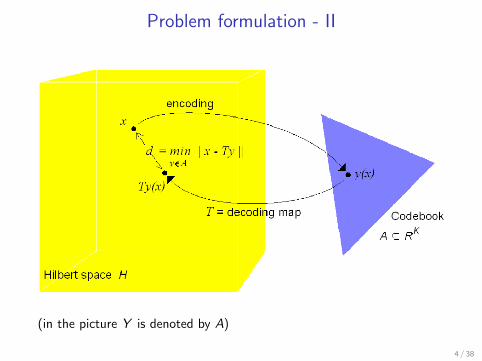
Problem formulation - II
(in the picture Y is denoted by A)
4 / 38

Problem formulation - III
LetfT (x) = min
y∈Y‖x − Ty‖2
I Average reconstruction error:
R(T ) = EfT (X ) =
∫fT (x)dµ(x)
I Think of fT as the loss and R(T ) as the expected risk of T
I Goal is to find a dictionary T within a prescribed set T , whichminimizes the risk
5 / 38
Learning method
Measure µ in unknown. Given a sample x1, . . . , xm i.i.d. from µ,learn the dictionary by minimizing the average empiricalreconstruction error
R(T ) := EfT =1
m
m∑i=1
fT (xi ) =1
m
m∑i=1
miny∈Y‖xi − Ty‖2
2
I For fixed T we solve a constrained least squares problem
I The loss function is typically not convex and the optimizationproblem is hard to solve, so we are fine to just reach astationary point with small error
6 / 38
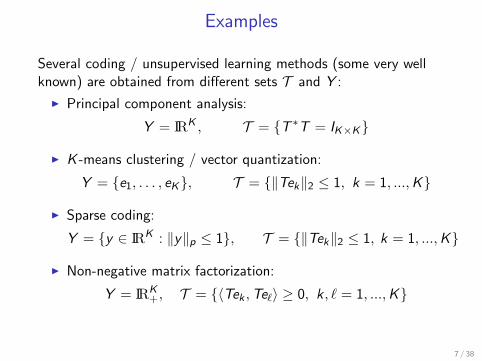
Examples
Several coding / unsupervised learning methods (some very wellknown) are obtained from different sets T and Y :
I Principal component analysis:
Y = IRK , T = T ∗T = IK×K
I K -means clustering / vector quantization:
Y = e1, . . . , eK, T = ‖Tek‖2 ≤ 1, k = 1, ...,K
I Sparse coding:
Y = y ∈ IRK : ‖y‖p ≤ 1, T = ‖Tek‖2 ≤ 1, k = 1, ...,K
I Non-negative matrix factorization:
Y = IRK+, T = 〈Tek ,Te`〉 ≥ 0, k, ` = 1, ...,K
7 / 38

PCA
If Y = RK we recover PCA, since
miny∈RK
‖x − Ty‖22 = ‖x − PT (x)‖2
2
where PT is the orthogonal projection on the range of T
I Require w.l.o.g. the tk be orthonormal (i.e. T ∗T = IK×K ), so
miny∈RK
‖xi − Ty‖22 = ‖xi‖2
2 − ‖T ∗xi‖22
I Minimizing the average reconstruction error is the same asfinding the K -dimensional linear subspace of maximumvariance
8 / 38
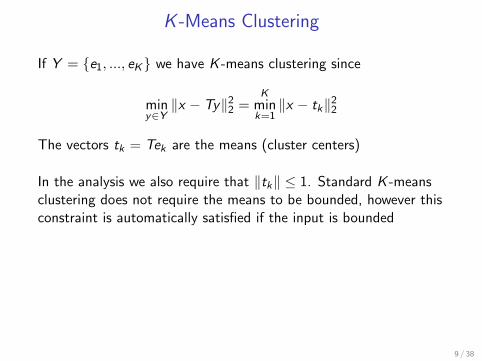
K -Means Clustering
If Y = e1, ..., eK we have K -means clustering since
miny∈Y‖x − Ty‖2
2 =K
mink=1‖x − tk‖2
2
The vectors tk = Tek are the means (cluster centers)
In the analysis we also require that ‖tk‖ ≤ 1. Standard K -meansclustering does not require the means to be bounded, however thisconstraint is automatically satisfied if the input is bounded
9 / 38
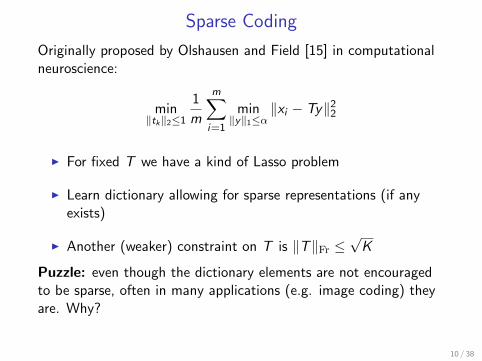
Sparse Coding
Originally proposed by Olshausen and Field [15] in computationalneuroscience:
min‖tk‖2≤1
1
m
m∑i=1
min‖y‖1≤α
‖xi − Ty‖22
I For fixed T we have a kind of Lasso problem
I Learn dictionary allowing for sparse representations (if anyexists)
I Another (weaker) constraint on T is ‖T‖Fr ≤√K
Puzzle: even though the dictionary elements are not encouragedto be sparse, often in many applications (e.g. image coding) theyare. Why?
10 / 38
Matrix Factorization
Reformulation as a matrix factorization problem:
minT ,Y‖X − TY ‖2
Fr
whereX = [x1, ..., xm], Y = [y1, ..., ym]
I Earlier work on non-negative matrix factorization [11]:H = IRd , require that T ,Y ≥ 0
11 / 38
Uniform bound
We study the uniform deviation of the random variable
EfT − EfT
The bound is controlled by n, K , and the size of the sets Y and TI A uniform bound is useful to bound the empirical error
minimizer
I It also leads to a bound for the excess risk
R(T )− minT∈T
R(T )
12 / 38

Bounding the excess risk
I Recall R(T ) = EfT (X ) and R(T ) = 1m
m∑i=1
fT (xi )
I Let T ∗ such that R(T ∗) = minT∈T
R(T )
Decompose the excess risk as
R(T )−R(T ∗) = R(T ∗)−R(T ∗)︸ ︷︷ ︸unif. bound
+ R(T )−R(T ∗)︸ ︷︷ ︸≤0
+R(T )−R(T )︸ ︷︷ ︸unif. bound
Uniform bound is also nice if we can’t find T because ofnon-convexity!
13 / 38

Uniform bound
Theorem 1. If c = supT∈T ‖T‖∞ ≥ 1, Y ⊆ ‖y‖2 ≤ 1 andδ ∈ (0, 1), then with prob. ≥ 1− δ in the observed data x ∼ µm
supT∈T
EfT − EfT
≤ 6c2K
32
√π
m+ c2
√8 ln 1/δ
m
Corollary 2. If supT∈T ‖T‖∞ ≤ ∞ and Y ⊆ ‖y‖2 ≤ 1 then asm→∞
EfT −→ minT∈T
EfT
14 / 38

Uniform bound (cont.)
Theorem 3. If c = supT∈T ‖T‖∞ ≥ 1, Y ⊆ ‖y‖2 ≤ 1 andδ ∈ (0, 1), then with prob. ≥ 1− δ in the observed data x ∼ µm
supT∈T
EfT − EfT
≤ 6c2K
32
√π
m+ c2
√8 ln 1/δ
m
Method: we bound the Rademacher average,
R(F , µ) =2
mEx∼µmEσ sup
T∈T
m∑i=1
σi fT (xi )
where σ1, ..., σm are iid Rademacher. Then use
Theorem 4 ([2, 9]). If F is a [0, b]-valued function class, then withprob. ≥ 1− δ
supf∈F
Ef − Ef
≤ R(F , µ) + b
√log 1
δ
2m
15 / 38
Proof I
Recall fT (x) = miny∈Y‖x − Ty‖2, let
F = fT : T ∈ T
and let b = maxx maxT fT (x)First we easily obtain
‖x − Ty‖2 ≤ 1 + ‖Ty‖2 − 2〈x ,Ty〉 ≤ 1 + c2 + 2c = (1 + c)2
so since c ≥ 1 we can set b = 4c2.
We proceed to bound the Rademacher average:
R(F , µ) =2
mEx∼µmEσ sup
T∈T
m∑i=1
σi fT (xi )
16 / 38

Proof - II
Let γ1, . . . , γm be i.i.d. N(0, 1). By the inequality [10]
Eσ supT∈T
m∑i=1
σi fT (xi ) ≤√π
2Eγ sup
T∈T
m∑i=1
γi fT (xi ) (1)
so the Rademacher average is controlled by the Gaussian average,which we bound by Slepian’s Lemma
Lemma 5 ([18]). If ΩT : T ∈ T and ΘT : T ∈ T areGaussian processes such that
E (ΩT1 − ΩT2)2 ≤ E (ΘT1 −ΘT2)2 ∀T1,T2 ∈ T
thenE sup
T∈TΩT ≤ E sup
T∈TΘT
17 / 38
Proof - III
We choose ΩT =m∑i=1
γi fT (xi ) and
ΘT =√
8m∑i=1
K∑k=1
γik 〈xi ,Tek〉+√
2m∑i=1
K∑k,`=1
γi`k 〈Te`,Tek〉
A direct computation then gives
E (ΩT1 − ΩT2 )2 ≤ E (ΘT1 −ΘT2 )2 ∀T1,T2 ∈ T
So, by Slepian’s Lemma
E supT∈T
ΩT ≤ E supT∈T
ΘT
≤√
8E supT∈T
∑i,k
γik 〈xi ,Tek〉︸ ︷︷ ︸≤cK√
8m
+√
2E supT∈T
∑i,k,`
γik` 〈Tel ,Tek〉︸ ︷︷ ︸≤c2K
32√
2m
18 / 38

Proof IV
The last two inequalities follows by Cauchy-Schwarz’, Jensen’sinequalities and the orthogaussian properties of the γik and γik`:
E supT∈T
K∑k=1
m∑i=1
γik 〈xi ,Tek〉 ≤ cEK∑
k=1
∥∥∥∥∥m∑i=1
γikxi
∥∥∥∥∥ ≤ cK√m
and
E supT∈T
K∑k,`=1
m∑i=1
γik` 〈Tek ,Te`〉 = E supT∈T
∑k
⟨ek ,T
∗T∑i,`
γik`e`
⟩≤ Ec2
∑k
‖∑i,`
γik`e`‖
≤ c2K
√E‖∑i,`
γi`e`‖2 = c2K√Km
Multiply by√
2π/m to get a bound on the Rademacher complexity of
R (F , µ) ≤ 4cK
√π
m+ 2c2K 2
√π
m≤ 6c2K
32
√π
m.
19 / 38

Special case: K -means clustering
If Y = e1, . . . , eK and T = ‖Tek‖ ≤ 1, k = 1, ...,K we obtainK -means clustering:
fT (x) =K
mink=1‖x − Tek‖2
In this case Theorem 3 improves to
Theorem 6 (see also [4]). Let δ ∈ (0, 1). With probabilitygreater 1− δ in the sample x ∼ µm we have for all T ∈ T
Ex∼µfT (x) ≤ 1
m
m∑i=1
fT (xi ) + K
√18π
m+
√8 ln (1/δ)
m.
20 / 38
Proof
Use again Slepian’s Lemma, choosing ΩT as above but now choose
ΘT =m∑i=1
K∑k=1
γik ‖xi − Tek‖2
Then compute
E supT∈T
ΘT ≤ 2E supT∈T
m∑i=1
K∑k=1
γik 〈xi ,Tek〉+ E supT∈T
m∑i=1
K∑k=1
γik ‖Tek‖2
≤ 3c2K√m,
Multiply by√
2π/m as above to bound the Rademacher average, thenuse Theorem 4
21 / 38

Improved uniform bound
Let b = maxT∈T
max‖x‖≤1
fT (x), let ‖T‖Y = supy∈Y‖Ty‖ and assume that
ρ := supT∈T
supy∈Y‖Ty‖ ≥ 1
Theorem 7. Let δ ∈ (0, 1). With probability at least 1− δ in theobserved data x ∼ µm we have
supT∈T
EfT − EfT
≤ K√
m
(14ρ+
b
2
√ln (16mρ2)
)+ b
√ln 1/δ
2m
Idea: we decompose the function class by a finite union and use
Theorem 8. Let Fn : 1 ≤ n ≤ N be a finite collection of [0, b]-valuedfunction classes. With prob. ≥ 1− δ we have
maxn≤N
supf∈Fn
[Ef − Ef
]≤ max
n≤NRm (Fn, µ) + b
√lnN + ln
(1δ
)2m
22 / 38

Decomposition of the function class
For every map T : IRK → H there is an isometry U ∈ L(IRK ,H)and S ∈ IRK×K such that
T = US
We then have the decomposition:
F =⋃S∈SGS
GS = x 7→ miny∈Y‖x − USy‖2 : U∗U = I
where S = S ∈ IRK×K : ‖S‖Y ≤ ρ
23 / 38

Using covering numbers
Lemma 9. With probability at least 1− δ, for all T ∈ T
EfT − EfT ≤ supS∈SRm(GS , µ) +
bK
2
√ln (16mρ2)
m+
8ρ√m
+ b
√ln(1/δ)
2m.
Proof follows by a covering number argument and Theorem 8.
Step 1. There exists Sε ⊆ S, of cardinality |Sε| ≤ (4 ‖T ‖Y /ε)K 2
suchthat for every S ∈ S there exists Sε ∈ Sε with ‖S − Sε‖Y ≤ ε
Step 2. For every T ∈ T , T = US , there is Tε = USε such that‖S − Sε‖Y ≤ ε and
maxx|fT (x)− fUSε
(x)| ≤ 4 maxT
maxy‖Ty‖ε = 4ρε
Step 3. Use Theorem 8
24 / 38

Step 2
I Decompose T = US with U∗U = IK×K and S ∈ IRK×K
I Since U is an isometry ‖S‖Y = ‖T‖Y ≤ ‖T ‖YI Choose Sε ∈ Sε such that ‖Sε − S‖Y < ε
I For every x ∈ H, ‖x‖ ≤ 1, we have
|fT (x)− fUSε (x)| =
∣∣∣∣ infy∈Y‖x − USy‖2 − inf
y∈Y‖x − USεy‖2
∣∣∣∣≤ sup
y∈Y
∣∣∣‖x − USy‖2 − ‖x − USεy‖2∣∣∣
= supy∈Y|〈USεy − USy , 2x − (USy + USεy)〉|
≤ (2 + 2 ‖T ‖Y ) supy∈Y‖(Sε − S) y‖
≤ 4 ‖T ‖Y ε = 4ρε
25 / 38

Step 3
We apply Theorem 8 to the finite collection of function classesGS : S ∈ Sε to see that with probability at least 1− δ
supT∈T
Ex∼µfT (x)− 1
m
m∑i=1
fT (xi )
≤ maxS∈Sε
supU
Ex∼µfUS (x)− 1
m
m∑i=1
fUS (xi ) + 8ρε
≤ maxS∈Sε
Rm (GS , µ) + b
√ln |Sε|+ ln (1/δ)
2m+ 8ρε
≤ supS∈SRm (GS , µ) +
bK
2
√ln (16mρ2)
m+
8ρ√m
+ b
√ln (1/δ)
2m
The last line follows from the bound on |Sε|, the choice ε =√
1m
and subadditivity of the square root
26 / 38
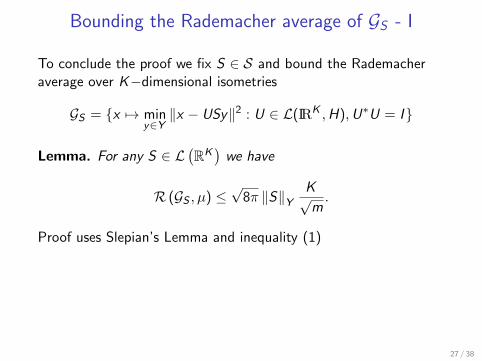
Bounding the Rademacher average of GS - I
To conclude the proof we fix S ∈ S and bound the Rademacheraverage over K−dimensional isometries
GS = x 7→ miny∈Y‖x − USy‖2 : U ∈ L(IRK ,H),U∗U = I
Lemma. For any S ∈ L(RK)
we have
R (GS , µ) ≤√
8π ‖S‖YK√m.
Proof uses Slepian’s Lemma and inequality (1)
27 / 38
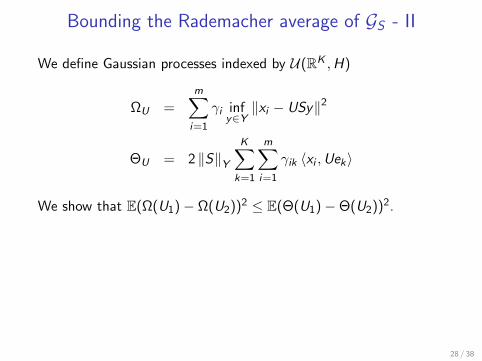
Bounding the Rademacher average of GS - II
We define Gaussian processes indexed by U(RK ,H)
ΩU =m∑i=1
γi infy∈Y‖xi − USy‖2
ΘU = 2 ‖S‖YK∑
k=1
m∑i=1
γik 〈xi ,Uek〉
We show that E(Ω(U1)− Ω(U2))2 ≤ E(Θ(U1)−Θ(U2))2.
28 / 38

Bounding the Rademacher average of GS - III
E (ΩU1 − ΩU2 )2 =m∑i=1
(infy∈Y‖xi − U1Sy‖2 − inf
y∈Y‖xi − U2S‖2
)2
≤m∑i=1
(supy∈Y‖xi − U1Sy‖2 − ‖xi − U2S‖2
)2
≤m∑i=1
supy∈Y
4〈xi , (U2 − U1)Sy〉2
≤ 4 ‖S‖2Y
m∑i=1
K∑k=1
(〈xi ,U1ek〉 − 〈xi ,U2ek〉)2
= E (ΘU1 −ΘU2 )2
Then ERγsupU
Ω(U) ≤︸︷︷︸Slepian
EsupU
ΘU ≤︸︷︷︸C.S.&Jensen
2 ‖S‖Y K√m
29 / 38

Examples
Leading term in the upper bound:
I Principal component analysis: cK√
log(m)m (can be improved
to c√
Km )
I K -means clustering: cK√
log(m)m (can be improved to c K√
m)
I Sparse coding: cK 2−1/p
√log(mK2−2/p)
m
I Non-negative matrix factorization cK 3/2√
log(mK)m
30 / 38
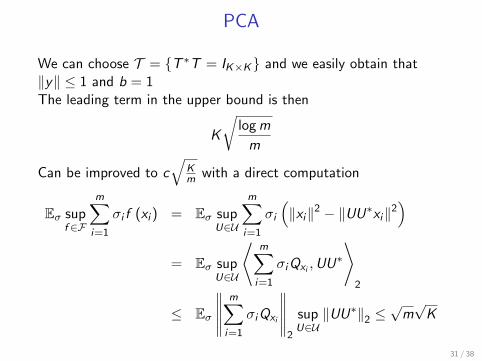
PCA
We can choose T = T ∗T = IK×K and we easily obtain that‖y‖ ≤ 1 and b = 1The leading term in the upper bound is then
K
√logm
m
Can be improved to c√
Km with a direct computation
Eσ supf ∈F
m∑i=1
σi f (xi ) = Eσ supU∈U
m∑i=1
σi
(‖xi‖2 − ‖UU∗xi‖2
)= Eσ sup
U∈U
⟨m∑i=1
σiQxi ,UU∗
⟩2
≤ Eσ
∥∥∥∥∥m∑i=1
σiQxi
∥∥∥∥∥2
supU∈U‖UU∗‖2 ≤
√m√K
31 / 38

Sparse coding
I Y = y : y ∈ RK , ‖y‖p ≤ 1
I T = T : RK → H : ‖Tek‖ ≤ 1, k = 1, ...,K
If p ≥ 1 we have
‖Ty‖ ≤K∑
k=1
|yk |‖Tek‖ ≤
(K∑
k=1
‖Tek‖q) 1
q
≤ K1q = K 1− 1
p
We then bound the estimation error by Theorem 8 with b = 1
K√m
(14K 1−1/p +
1
2
√ln(16mK 2−2/p
))+
√ln (1/δ)
2m
For p = 1 the order is comparable to K -means clustering
32 / 38
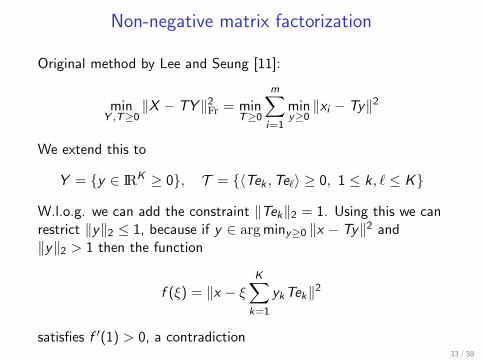
Non-negative matrix factorization
Original method by Lee and Seung [11]:
minY ,T≥0
‖X − TY ‖2Fr = min
T≥0
m∑i=1
miny≥0‖xi − Ty‖2
We extend this to
Y = y ∈ IRK ≥ 0, T = 〈Tek ,Te`〉 ≥ 0, 1 ≤ k, ` ≤ K
W.l.o.g. we can add the constraint ‖Tek‖2 = 1. Using this we canrestrict ‖y‖2 ≤ 1, because if y ∈ argminy≥0 ‖x − Ty‖2 and‖y‖2 > 1 then the function
f (ξ) = ‖x − ξK∑
k=1
ykTek‖2
satisfies f ′(1) > 0, a contradiction33 / 38
Non-negative matrix factorization (cont.)
I Y = y ∈ IRK ≥ 0
I T = ‖Tek‖ = 1, 〈Tek ,Te`〉 ≥ 0, 1 ≤ k, ` ≤ K
Since ‖y‖2 ≤ 1 we have
‖Ty‖ ≤K∑
k=1
yk‖Tek‖ ≤
√√√√ K∑k=1
‖Tek‖2 =√K
By Theorem 8 with b = 1 the estimation error is bounded as
K√m
(14√K +
1
2
√ln (16mK )
)+
√ln (1/δ)
2m
34 / 38
Subspace clustering
Let y = (y (1), ..., y (N)) ∈ RK1 × · · · × RKN ,N∑i=1
Ki = K and choose
Y =y : at most one y (i) 6= 0, and ‖y (i)‖2 ≤ α ∀i
Write T = [T (1), ...,T (N)], with T (i) ∈ L(RKi ,H), to obtain theproblem
miny∈Y‖x − Ty‖2
2 =N
mini=1
min‖y (i)‖2≤α
‖x − T (i)y (i)‖22
I Encourage input to lie on one of many (low dimensional)subspaces
I If Ki = q ∀i this is known as k-q-flats (see e.g. [5], in ourcase k = N) or subspace clustering
35 / 38

A bound for subspace clustering
Let y = (y (1), ..., y (N)) ∈ RK1 × · · · × RKN ,N∑i=1
Ki = K and choose
Y =y : at most one y (i) 6= 0, and ‖y (i)‖2 ≤ α ∀i
We have b = 1. W.l.o.g we can choose T (i) to be partialisometries, so
‖T‖Y ≤ maxT∈T‖Ty‖ =
Nmaxi=1
maxT (i)
max‖y (i)‖≤1
‖T (i)y (i)‖ ≤ 1
By Theorem 8 with b = 1 the estimation error is bounded as
K√m
(14 +
1
2
√ln (16m)
)+
√ln (1/δ)
2m
36 / 38

References I[1] A. Antos, L. Gyorfi, A. Gyorgy. Individual convergence rates in empirical vector quantizer design. IEEE
Transactions on Information Theory, 51(11):4013–4022, 2005.
[2] P. L. Bartlett and S. Mendelson. Rademacher and Gaussian Complexities: Risk Bounds and Structural Results.Journal of Machine Learning Research, 3: 463–482, 2002.
[3] P. Bartlett, T. Linder, G. Lugosi. The minimax distortion redundancy in empirical quantizer design. IEEETransactions on Information Theory, 44: 1802–1813, 1998.
[4] G. Biau, L. Devroye, G. Lugosi. On the performance of clustering in Hilbert spaces. IEEE Transactions onInformation Theory, 54:781–790, 2008.
[5] P.S. Bradley, O.L. Mangasarian. k-Plane clustering. Journal of Global Optimization 16(1)23-32, 2000.
[6] F. Cucker and S. Smale. On the mathematical foundations of learning, Bulletin of the American MathematicalSociety, 39 (1):1–49, 2001.
[7] W. Hoeffding. Probability inequalities for sums of bounded random variables, Journal of the AmericanStatistical Association, 58:13–30, 1963.
[8] P. O. Hoyer. Non-negative matrix factorization with sparseness constraints. Journal of Machine LearningResearch, 5:1457–1469, 2004.
[9] V. Koltchinskii and D. Panchenko. Empirical margin distributions and bounding the generalization error ofcombined classifiers, The Annals of Statistics, 30(1): 1–50, 2002.
[10] M. Ledoux, M. Talagrand. Probability in Banach Spaces, Springer, 1991.
[11] D. D. Lee and H. S. Seung. Learning the parts of objects by non-negative matrix factorization. Nature 401,788–791, 1999.
[12] S. Z. Li, X. Hou, H. Zhang, and Q. Cheng. Learning spatially localized parts-based representations. Proc.IEEE Conf. on Computer Vision and Pattern Recognition (CVPR), Vol. I, pages 207–212, Hawaii, USA, 2001.
37 / 38
References II[13] A. Maurer and M. Pontil. Generalization bounds for K -dimensional coding schemes in Hilbert spaces.
Proceedings of the 19th international conference on Algorithmic Learning Theory, pages 91, 2008,
[14] C. McDiarmid. Concentration, in Probabilistic Methods of Algorithmic Discrete Mathematics, p195-248,Springer, Berlin, 1998.
[15] B. A. Olshausen and D. J. Field. Emergence of simple-cell receptive field properties by learning a sparse codefor natural images. Nature, 381:607–609, 1996.
[16] J. Shawe-Taylor, C. K. I. Williams, N. Cristianini, J. S. Kandola. On the eigenspectrum of the Gram matrixand the generalization error of kernel-PCA. IEEE Transactions on Information Theory 51(7): 2510–2522, 2005.
[17] O. Wigelius, A. Ambroladze, J. Shawe-Taylor. Statistical analysis of clustering with applications. Preprint,2007.
[18] D. Slepian. The one-sided barrier problem for Gaussian noise. Bell System Tech. J., 41: 463–501, 1962.
[19] A.W. van der Vaart and J.A. Wallner. Weak Convergence and Empirical Processes, Springer Verlag, 1996.
[20] L. Zwald, L., O. Bousquet, and G. Blanchard. Statistical properties of kernel principal component analysis.Machine Learning 66(2-3): 259–294, 2006.
38 / 38