josefina lópez herrera institut d’informàtica i robòtica industrial universitat politècnica de...
Post on 22-Dec-2015
214 views
TRANSCRIPT

Josefina López HerreraInstitut d’Informàtica i Robòtica Industrial
Universitat Politècnica de Catalunya
Edifici Nexus
Gran Capità 2-4
Barcelona 08034, Spain
Improving the Forecasting Capability of Fuzzy Inductive
Reasoning by Means of Dynamic Mask Allocation
François E. CellierElectrical & Computer Engineering Dept.
University of Arizona
P.O.Box 210104
Tucson, AZ 85721-0104
U.S.A

Table of Contents
• Introduction.
• Dynamic Mask Allocation.
• DMAFIR and QDMAFIR.
• Multiple Regimes.
• Variable Structure Systems.
• Conclusions.
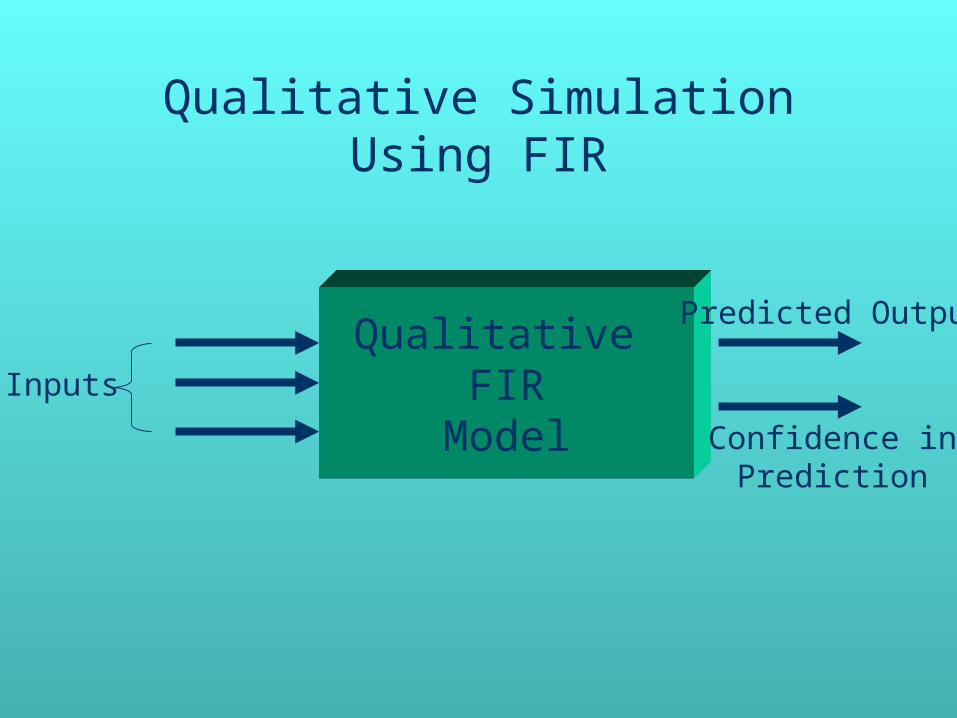
Qualitative Simulation Using FIR
Qualitative FIR
ModelInputs
Confidence inPrediction
Predicted Output
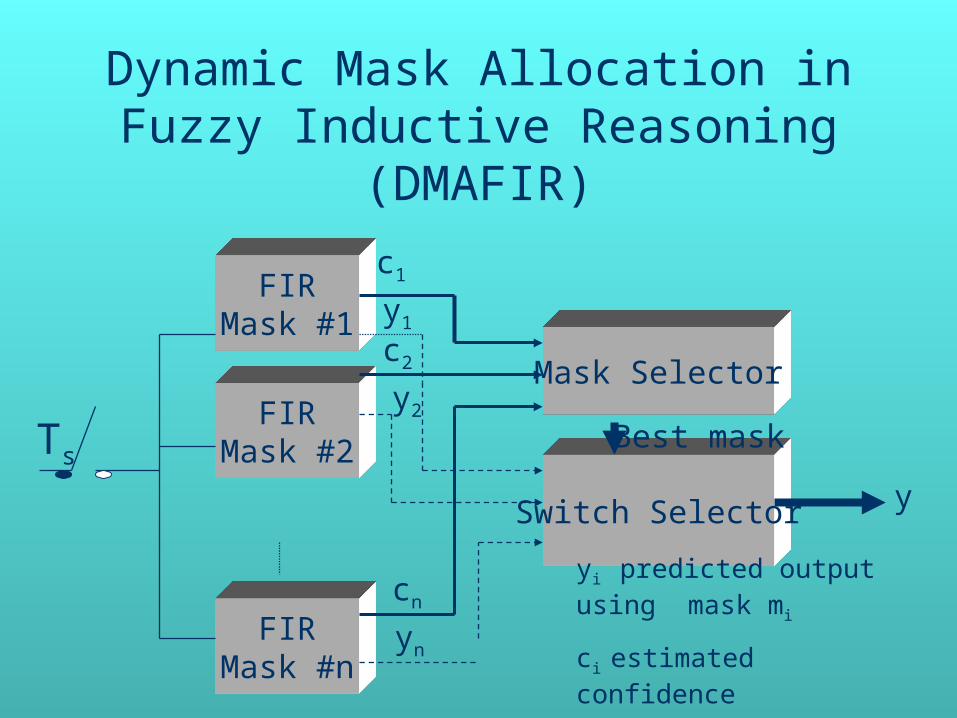
Dynamic Mask Allocation in Fuzzy Inductive Reasoning (DMAFIR)
FIRMask #1
FIRMask #2
Mask Selector
FIRMask #n
Switch Selector
c1
c2
yn
y1
y2
cn
Best mask
y
Ts
yi predicted output using mask mi
ci estimated confidence

Quality-adjusted Dynamic Mask Allocation (QDMAFIR)
(t)conf(t)Q(t)Q simireldyn
Qi is the mask quality of the selected mask mi
opt
irel Q

Optimal and Suboptimal Mask for Barcelona Time Series

Dynamic Mask Allocation Applied to Barcelona Time Series
• Comparison of FIR and DMAFIR for Barcelona time series.
• Comparison of FIR and QDMAFIR for Barcelona time series.

Qualitative Simulation with FIR
)4,9()3,8()2,7()1,6()5(
)4,8()3,7()2,6()1,5()4(
)4,7()3,6()2,5()1,4()3(
)4,6()3,5()2,4()1,3()2(
)4,5()3,4()2,3()1,2()(
)4,4()3,3()2,2()1,()(
)4,3()3,2()2,()1,()(
)4,2()3,()2,()1,()2(
)4,()3,()2,()1,2()3(
)4,()3,()2,2()1,3()4(
ttyttyttyttytty
ttyttyttyttytty
ttyttyttyttytty
ttyttyttyttytty
ttyttyttyttytty
ttyttyttyttyty
ttyttyttytytty
ttyttytyttytty
ttytyttyttytty
tyttyttyttytty
Y
)4,9()3,8()2,7()1,6()5(
)4,8()3,7()2,6()1,5()4(
)4,7()3,6()2,5()1,4()3(
)4,6()3,5()2,4()1,3()2(
)4,5()3,4()2,3()1,2()(
)4,4()3,3()2,2()1,()(
)4,3()3,2()2,()1,()(
)4,2()3,()2,()1,()2(
)4,()3,()2,()1,2()3(
)4,()3,()2,2()1,3()4(
ttyttyttyttytty
ttyttyttyttytty
ttyttyttyttytty
ttyttyttyttytty
ttyttyttyttytty
ttyttyttyttyty
ttyttyttytytty
ttyttytyttytty
ttytyttyttytty
tyttyttyttytty
Y
prediction for time ),( ktnty tnt using k steps
real data predicted data

Prediction ErrorPrediction Error
)(0.25iiii dynstdmeantot errerrerrerr
))()(( terrterrmeanerriii simabsdyn ))()(( terrterrmeanerr
iii simabsdyn
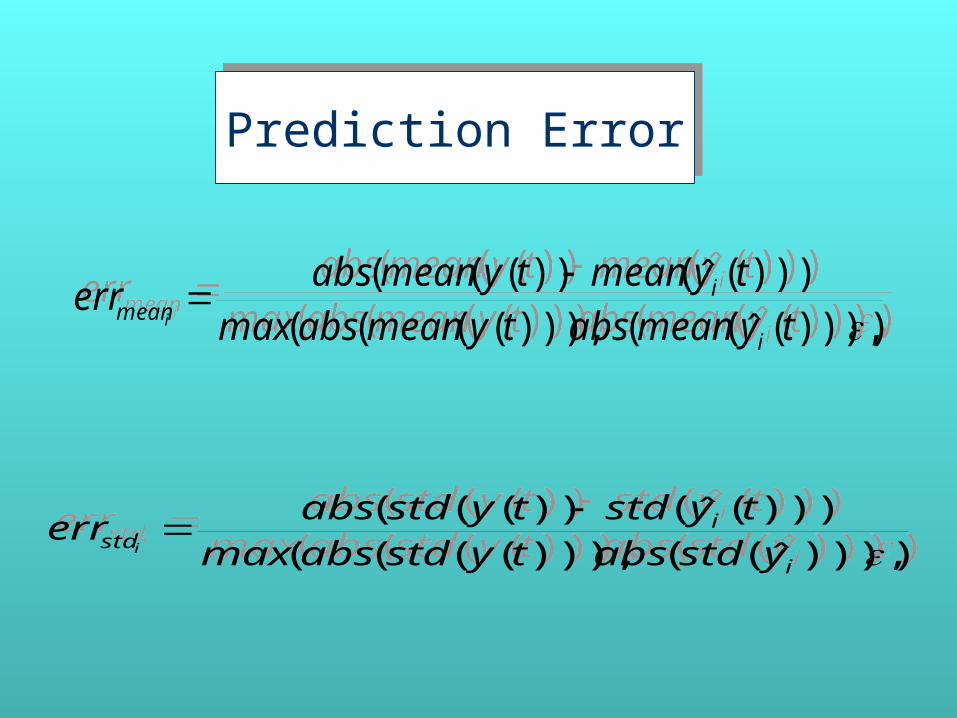
Prediction ErrorPrediction Error
)))),(ˆ(())),(((()))(ˆ())(((
tymeanabstymeanabsmaxtymeantymeanabs
erri
imeani
)))),(ˆ(())),((((
)))(ˆ())(((tymeanabstymeanabsmax
tymeantymeanabserr
i
imeani
)))),ˆ(())),(((()))(ˆ())(((
i
istd ystdabstystdabsmax
tystdtystdabserr
i
)))),ˆ(())),((((
)))(ˆ())(((i
istd ystdabstystdabsmax
tystdtystdabserr
i

Prediction ErrorPrediction Error
))(ˆ),(( tytymaxy imax ))(ˆ),(( tytyminy imin
),()(
)(minmax
minnorm yymax
ytyty
),()(
)(minmax
minnorm yymax
ytyty
),(
)(ˆ)(minmax
mininorm yymax
ytyty
i
),()(ˆ)(
minmax
mininorm yymax
ytyty
i
))()(()( tytyabsterrii normnormabs ))()(()( tytyabsterr
ii normnormabs
)),(),((
))(),(()(
tytymax
tytymintsim
i
i
normnorm
normnormi
)),(),((
))(),(()(
tytymax
tytymintsim
i
i
normnorm
normnormi
)(0.1 tsimerr isimi )(0.1 tsimerr isimi

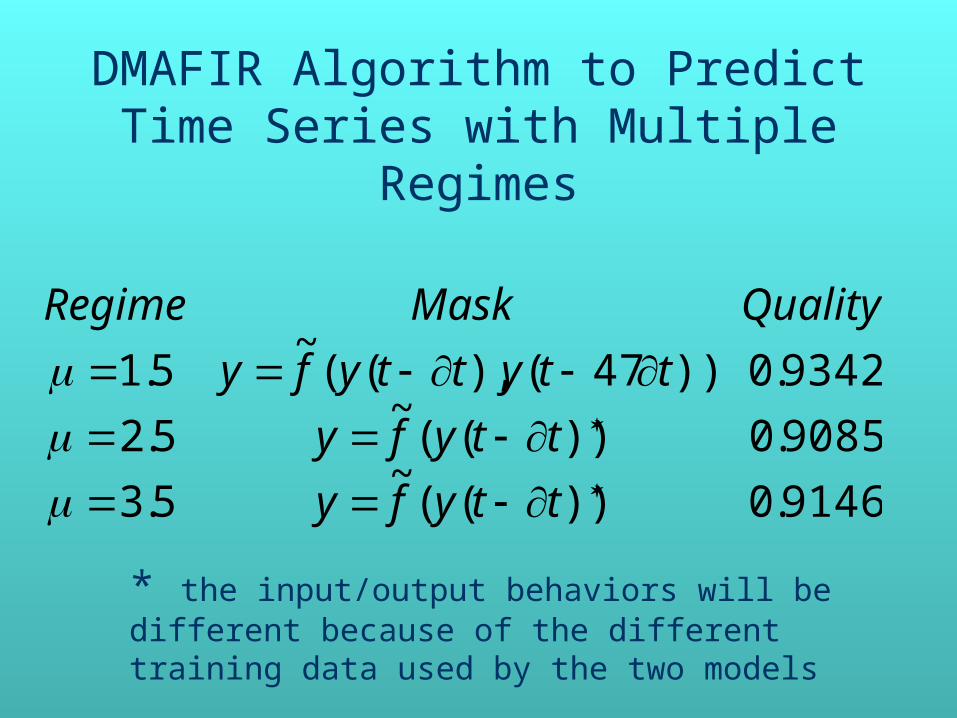
DMAFIR Algorithm to Predict Time Series with Multiple Regimes
• The behavioral patterns change between segments.
• Van-der-Pol oscillator series is introduced. This oscillator is described by the following second-order differential
equation: 0)1( 2 xxxx
x1• By choosing the outputs of the two integrators as two state
variables:
x2• The following state-space model is obtained:
21 12
212 )1(
2y
2 Output Time Series

DMAFIR Algorithm to Predict Time Series with Multiple Regimes
• To start the experiment, three different models were identified using three different values of 5.35.25.1
• The first 80 data points of each time series were discarded, as they represent the transitory period. The next 800 data points were used to learn the behavior of each series and the subsequent 200 data points were used as testing data.
• With a sampling rate of 0.05, 200 data points correspond aprox. to one oscillation period. Four limit cycles were used for training the model, and one limit cycle was used for testing.
DMAFIR Algorithm to Predict Time Series with Multiple Regimes
9146.0))((~
5.3
9085.0))((~
5.2
9342.0))47(),((~
5.1
ttyfy
ttyfy
ttyttyfy
QualityMaskRegime
* the input/output behaviors will be different because of the different training data used by the two models
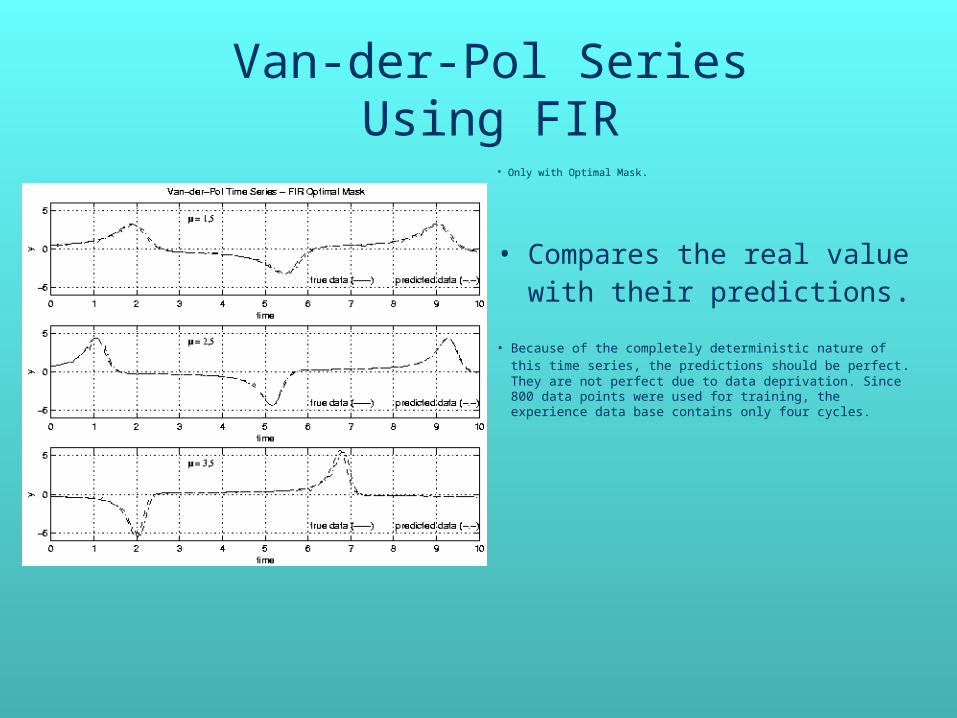
Van-der-Pol Series Using FIR
• Only with Optimal Mask.
• Compares the real value with their predictions.
• Because of the completely deterministic nature of this time series, the predictions should be perfect. They are not perfect due to data deprivation. Since 800 data points were used for training, the experience data base contains only four cycles.

One-day Predictions of the Van-der-Pol Series Using FIR With
• The model can not predict the peaks of the time series with5.3,5.2
• FIR can only predict behaviors that it has seen before.
5.1Model

Prediction Errors for Van-der-Pol Series
8272.15744.22691.4)5.3(
6463.49747.09645.2)5.2(
3922.107597.66292.2)5.1(
5.35.25.1
Model
Model
Model
Series
• The values along the diagonal are smallest and the values in the two remaining corners are largest.
• FIR during the prediction looks for five good neighbors, it only encounters four that are truly pertinent.

One-day Predictions of the Van-der-Pol
Multiple Regimes Series.• A time series be constructed in which the variable assumes a value of 1.5 during one segment, followed by a value of 2.5 during the second time segment, followed 3.5
The multiple regimes series consists of 553 samples.

Predictions Errors for Multiple Regimes Van-der-Pol Series
1195.1
9317.15.3
2978.25.2
8759.55.1
DMAFIR
errorModel
• The model obtained for
= 1.5 cannot predict the higher peaks of the second and third time segment very well.
• The DMAFIR error demostrates that this new technique can indeed be successfully applied to the problem of predicting time series that operate in multiple regimes.

Variable Structure System Prediction with DMAFIR
• A time-varing system exhibits an entire spectrum of different behavioral patterns. To demostrate DMAFIR’s ability of dealing with time-varying systems, the Van-der-Pol oscillator is used. A series was generated, in which
changes its value continuously in the range from 1.0 to 3.5. The time series contains 953 records sampled using a sampling interval of 0.05. The time series contains 953 records sampled using a sampling interval of 0.05.

One-day Prediction of the Van-der-Pol Time-Varying Series

One-day Predictions of the Van-der-Pol Time-Varying Series Using DMAFIR
with the Similarity Confidence Measure
2997.1
8791.15.3
4864.15.2
7431.55.1
DMAFIR
for
for
for
errorModel
• Predictions Errors for
Time-varying Van-der-Pol Series.

Conclusions
• FIRs confidence measure is exploited to dynamically select the one of a set of models that best predicts the behavior of the output of the given time
• The algorithm is shown to improve the quality of the forecasts made:– single regime (Barcelona)– multiple regimes (Van der Pol)– time-varying systems (Van der Pol)