itapêrobota
DESCRIPTION
teste Adriano SESITRANSCRIPT
ItapêRobotaRobot Design Executive Summary (RDES)

ItapêRobota Brazil
We are the SESI
ItapêRobota’s team, number
4041, from Brazil. We worked
hard and also, had a lot of fun
to get here. It’s an honor and
a dream coming true to
participate of this Open
European Championship.
We like too much making
noise and music and these
bring us happy and this way,
we are always animated. Our
highlights characteristics are
animation, energy and the
desire to accomplish our
goals.
Get to know better our great
spirited team that loves what
do and follows the FIRST®
values.

QUILTING
WOOD WORKING
STOVE
MEDICINE
BOWLING
SERVICE ANIMALS
WHERE TO GO ???
HOW TO START ???

S
TRATEGY
DESIGN P
RO
CE
SS
FUN
ROBOT F
AC
TS

INN
OV
ATION P
RO
GR
A
MMING
ME
ET
BR
AZIL
ME
CH
AN
ICA
L D
ESIGN

Robot Facts
We’ve used three light sensors strategically positioned, enabling it follows, align
or stop on black or green lines in different places on mat and one color sensor
to find the green medicine.
There are two kind s of drivetrain s in the robot: one of them is the
movement through the motors B and C to the rear wheels enabling the rear
drive, while the other is the movement through the motor A to attachments with
a reduction on attachment motor with gears, making it has more power t o
support the attachments.

Besides this, our robot has 13 attachments and approximately, XXX pieces and
all robot programming, is carried out by LEGO Mindstorms NXT v2.0.f4
programming.

To execute all missions, the NXT carries just
five programs to each group of missions:
1st Mission – Dog Size: 11, 4 KB;
2nd
Mission – Bowling Size: 28, 9 KB;
3rd
Mission – Plant Size: 15, 0 KB;
4th Mission – Ball Size: 7, 2 KB;
5th Mission – Platform Size: 7, 0 KB.


FUN
The funniest part of robot Project can be considered
the moment that the drivers put robot on practice, because
beyond we stay in expectation of a possible strike , each
of us give an opinion about how many pins will be knocked
and we pay attention when the ball will be ejected from the
Ball Game.
However, the most challenging parts are the construction and programming that we have to
analyze strategies and mechanisms that execute something safe and reliable.

The robot is called Robotinha, whose name was chose by the constructor when playing with
our team’s name ItapeRobota making the robot become called by the diminutive of Robota.
Sometimes we think that Robotinha has feelings, because when someone is upset with him,
he doesn’t execute what used to do, but when someone encourages him, he does all the things
right.

STRATEGY
After studying the best missions group that could spend less time through several
kinds of paths, we defined what ways the robot would perform on mat and then, we
started the build of attachments abl e to determined tasks. Thus , we tried balance two
aspects when performing a mission due the time and often that it happens: speed and
accuracy, because with a high speed, the accuracy will be smaller and vice -versa.
Therefore, we keep a good frequency of success when executing missions.

Our fav orite m ission, no doubt , is the Bowling, because we make six missions
with just one program and because we use light and color sensors, several ki nds of
resources like to find or to follow a line and align to wall and a different mechanism: the
pneumatic that lifts the lever of Strength Exercise.

DESIGN PROCESS
At beginning , we defined what wheel the robot could have through its
size balancing accuracy with speed. Therefore, we chose a wheel that has 4, 75
cm of radius and regulating the power’ motors , the robot becomes fast and
accurate bringing us, at moments like base returning, speed and time. Soon, we
defined the motors position to start build the chassis, because depending on the
position of them, they could have more entrances to beams and connectors
enabling strong rigidity in base and soon, we calculated the distance between
rear wheels and we’ve defined as a NXT in horizontal position to give better
accuracy on curves.
After this, we’ve started the build of robot’s coverage prioritizing the
rectangular shape to align on table walls and a long armor to protect light
sensors from ambient luminosity. Then, we built the structure to fix the
attachment’s motor and in it, we made a reduction with gears to have higher
torque (angular power of motor) and we put the light sensors and the NXT in a
position to facilitate view and program changing and also assist in practice of
battery changing.

Since the first stage to now, we’ve already participated of three selective
tournaments and our robot’ attachments (mainly the Transitions’ attachment)
and strategies have changed. A t the first tournament, we don´t used to do the
Medicine and Animals Service’ missions and the Transitions’ attachment was a
green ramp.
At the next tournament, we started to do the Animals Service mission,
but we didn’t do the Medicine mission and we did n’t put the chair under table.
Besides this, the Transitions’ attachment was a structure with white wheels that
elevated the robot to drive up the ramp.
After this tournament, we did all missions (but we just spin the
Cardiovascular Exercise roulette one time, like in the others tournaments) and
created an enormous structure to do the Video Call (TV), Quilting and Animals
Service missions at one time and another to do the Ball Game at the finally
seconds and the Transitions’ attachment becomes a inclined green platform
with robot on top. And now, we a lso do these missions, but the Strength
Exercise and Transitions’ attachments have changed. The first one, becomes a
structure made with pneumatic system and the other, a straight red and black
platform.
All the members’ team collaborated to the robot’s o r attachment’s build through
ideas projected as drawings or writings or trying build on practice with
imagination.

MECHANICAL DESIGN
The robot has a very well fixed and rigid chassis allowing to support the
rest of the structure. Besides this, the robot armor blocks up some movements
that can shake the structure due the cross shape.
Beams protect the robot and let it more robust. With this, we planned the
robot to be symmetrical ( vertically, both sides have the same weight to don’t
have unbalance and future problems with attachments weight ), compact, stable
and robust.
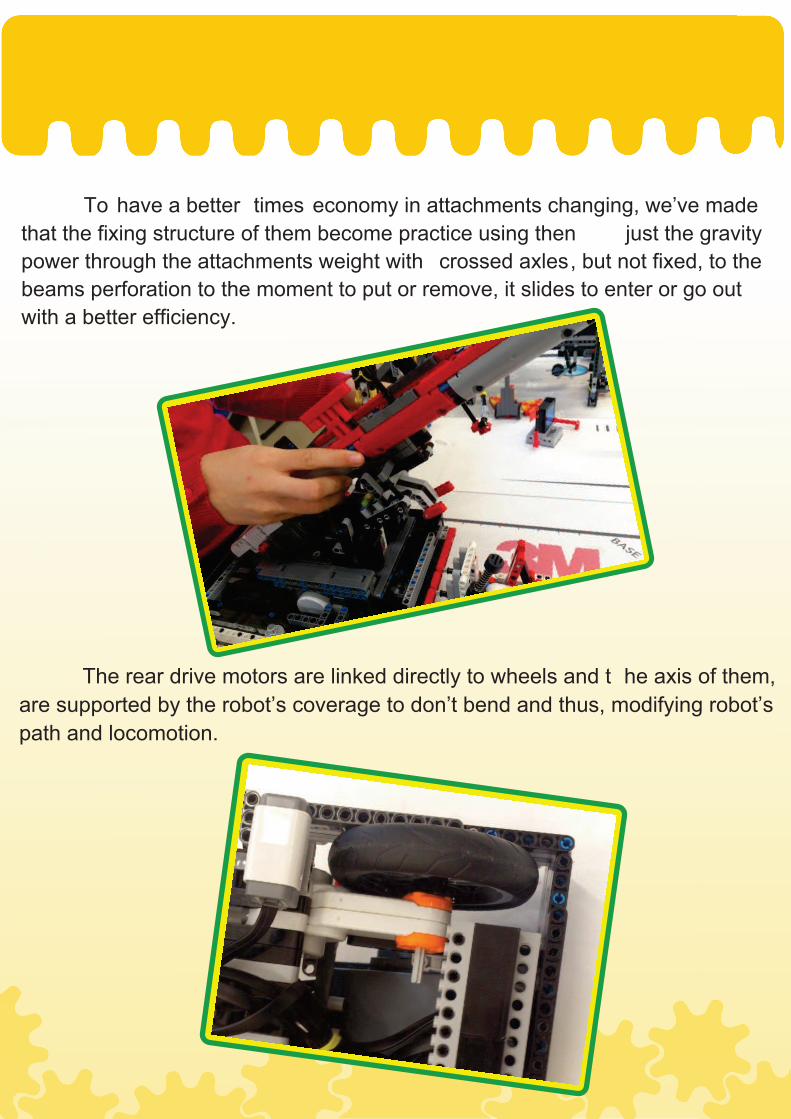
To have a better times economy in attachments changing, we’ve made
that the fixing structure of them become practice using then just the gravity
power through the attachments weight with crossed axles, but not fixed, to the
beams perforation to the moment to put or remove, it slides to enter or go out
with a better efficiency.
The rear drive motors are linked directly to wheels and t he axis of them,
are supported by the robot’s coverage to don’t bend and thus, modifying robot’s
path and locomotion.

We’ve used different kind of attachments
1st Mission/Name: Dog/Missions: Video Call (TV),
Quilting and Ser vice Animals./Score: 130
points/Attachments: We built an enormous structure to
execute all these missions at one time in approximately 10
seconds with some mechanisms like elastic string, lever
(inverse power – power exercised to down to another part
of the mechanism gets up) and properly activity, in other
words, it’s not necessary motorization.

and mechanisms to each mission:
3rd Mission/Name: Plant/Missions: Gardening, Stove, Similarity Recognition and
Cooperation and Wood Working (Take the chair)./Score: 110 points/Attachments: It’s not a
coincidence that the group of these attachments is called by Humble. The design is simple:
motorized mechanisms and a device that is ejected during the execution.
2nd Mission/Name: Bowling/Missions: Strength Exercise, Bowling, Flexibility, Video Call
(Computer), Cardiovascular Exercise (3 -1) and Medicine./Score: 175 points/ Attachments: We
use four independent attachments to execute six missions i n approximately one minute.
Therefore, there are several kind of attachments design: one of them contains pneumatic, others
contains elastic string mechanism and multifunctions.

4th Mission/Name: Ball/Missions: Take a ramp with a
little car to active the Ball Game (Future Effects Of Our
Current Decisions)./Attachments: The Mega Ramp is simply a
ramp that carries a car that will be released on 5 th Mission
through an inverse power trig ger, ejecting a ball from the rack
of the Ball Game. The robot execute this mission in
approximately 15 seconds.
mission 4th

5th Mission/Name: Platform/Missions: Active the device to do the Ball Game (Future
Effects Of Our Current Decisions), Transitions and Wood Work ing (Let the chair under
table)./Score: 150 points/Attachments: The kind of mechanism utilized was Main on Top, in
other words, the robot stay on this attachment driving to the opposite direction that the
attachment moves like two engaged gears. Beside thi s, we’ve used an independent
attachment to release the trigger of the mission before. All this mission has, approximately,
15 seconds to finish.
mission 5th

PROGRAMMING
Therefore, to have precision, during the
programing execution, the robot align to wall or through
light sensors that captures light intensity on mat lines
making the robot stop or follow it.
We use the My Blocks (programming blocks compacted being variable or
constant) constituting all mission programs that the robot execute.
To a better browsing and identifying through the programming area,
we’ve used legends to say what is happening at the moment to facil itate
searching and correcting of error and this way, increasing the productivity.

INOVATION
We like to much and we are proud when the car
from Mega Ramp is release d on miss ion’s following,
because beyond bring us a lot of points, is so excinting
see Robotinha on platform with our ball in the center
position of the rack from Ball Game finishing the robot
game with golden key.



8We have FUN!
7We display Gracious
Professionalism and
Coopertition in
everything we do
6We share our
experiences
with others5What we discover
is more important
than we win
4We honor the
spirit of friendly
competition
3We know our
coaches and mentors
don´t have all the
answers; we learn
together
2We do the work to find
solutions with guidance
our coaches and
mentors
1We are a
team
BRAZIL
SESI