isogeometric analysis application to car crash simulation · isogeometric analysis application to...
TRANSCRIPT

Isogeometric Analysis Applicationto Car Crash Simulation
S. Bouabdallah2, C. Adam2,3, M. Zarroug2, H. Maitournam3
1De Vinci Engineering Lab, Ecole Superieure d’Ingenieurs Leonard de Vinci2Direction Scientifique et Technologies Futures, PSA Peugeot Citroen
3Laboratoire de Mecanique des Solides, Ecole Polytechnique
Forum Teratec 2014 - July 2, 2014

Introduction Timoshenko beams Reissner-Mindlin plates Reissner-Mindlin shells Non-linear solid shells Conclusions
Outline
1 IntroductionIndustrial contextNumerical locking
2 Timoshenko beamsPure bending problemMembrane and transverse shear locking1D B-Spline reduced quadrature rules
3 Reissner-Mindlin platesPure bending problem2D B-Spline reduced quadrature rules
4 Reissner-Mindlin shellsShell modelShell obstacle course
5 Non-linear solid shellsBenchmark problems
6 Conclusions
S. Bouabdallah, C. Adam, M. Zarroug, H. Maitournam Teratec 2014 - IGA Application to Car Crash Simulation 1 / 26

Introduction Timoshenko beams Reissner-Mindlin plates Reissner-Mindlin shells Non-linear solid shells Conclusions
Industrial context
Good predictive capability expected.
Complete mesh size: ' 3 million elements.
=⇒ Explicit simulations performed on the whole model.
Stable time step: ' 1 µs.
10 hours to simulate ' 130ms on 96 CPUs.
=⇒ Excessive computational cost.
≥ 90% of the geometry meshed with linear Reissner-Mindlin shellelements.
Figure: Model size evolution
S. Bouabdallah, C. Adam, M. Zarroug, H. Maitournam Teratec 2014 - IGA Application to Car Crash Simulation 2 / 26

Introduction Timoshenko beams Reissner-Mindlin plates Reissner-Mindlin shells Non-linear solid shells Conclusions
Industrial context
Geometry has proved to be very significant.Need to refine some components.
=⇒ Stable time step greatly penalized.Accurate and smooth geometry preferred for contact problems.Large time used for preparing and meshing parts.
21
32
14
4
14
6 6 84 5
1
Figure: Estimation of relative time costs for model generation and analysisprocess
S. Bouabdallah, C. Adam, M. Zarroug, H. Maitournam Teratec 2014 - IGA Application to Car Crash Simulation 3 / 26

Introduction Timoshenko beams Reissner-Mindlin plates Reissner-Mindlin shells Non-linear solid shells Conclusions
Industrial context
=⇒ IsoGeometric Analysis for automobile crashworthiness.
Parametrized CAD geometry for optimisation process.
Analysis and Design share the same model.
Higher regularity between elements within a patch.
Figure: Numerical simulation process in isogeometric analysis.
S. Bouabdallah, C. Adam, M. Zarroug, H. Maitournam Teratec 2014 - IGA Application to Car Crash Simulation 4 / 26
Introduction Timoshenko beams Reissner-Mindlin plates Reissner-Mindlin shells Non-linear solid shells Conclusions
Numerical locking
Fully integrated low order elements, based on Timoshenko/Mindlinhypothesis, present poor performances with thin beams, plates andshells.Transverse shear and membrane locking appear.Classical Lagrange-based reduced and selective integration rules donot remove these pathologies.
=⇒ Need to define B-Spline/NURBS-based integration schemes.Framework:
Multi-patch problems with uniform regularity within each patch.Quadratic and cubic polynomials, regularity r from 0 to p − 1.
C0
Cr
Figure: Multi-patch problems.S. Bouabdallah, C. Adam, M. Zarroug, H. Maitournam Teratec 2014 - IGA Application to Car Crash Simulation 5 / 26

Introduction Timoshenko beams Reissner-Mindlin plates Reissner-Mindlin shells Non-linear solid shells Conclusions
1 IntroductionIndustrial contextNumerical locking
2 Timoshenko beamsPure bending problemMembrane and transverse shear locking1D B-Spline reduced quadrature rules
3 Reissner-Mindlin platesPure bending problem2D B-Spline reduced quadrature rules
4 Reissner-Mindlin shellsShell modelShell obstacle course
5 Non-linear solid shellsBenchmark problems
6 Conclusions
S. Bouabdallah, C. Adam, M. Zarroug, H. Maitournam Teratec 2014 - IGA Application to Car Crash Simulation 6 / 26

Introduction Timoshenko beams Reissner-Mindlin plates Reissner-Mindlin shells Non-linear solid shells Conclusions
Pure bending problem
Thick curved beam of length L and radius R clamped at one end.
Moment of inertia for a rectangular section: I = bh3
12 .
Distributed loading moment proportional to thebending stiffness:
m(s) = EI( π
2L
)2
sin( π
2Ls).
=⇒ Exact solution known, depends only of L and R:
un(s) =2Lπ
1− ( 2LπR )2
(cos
( s
R
)− cos
( π2L
s))
.
Exact membrane and shear strains are zero.
Severe test for membrane and shear locking.
S. Bouabdallah, C. Adam, M. Zarroug, H. Maitournam Teratec 2014 - IGA Application to Car Crash Simulation 7 / 26
Introduction Timoshenko beams Reissner-Mindlin plates Reissner-Mindlin shells Non-linear solid shells Conclusions
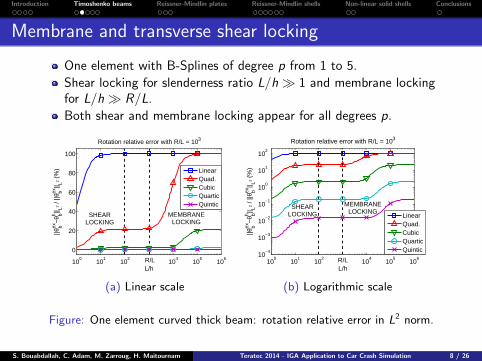
Membrane and transverse shear locking
One element with B-Splines of degree p from 1 to 5.
Shear locking for slenderness ratio L/h� 1 and membrane lockingfor L/h� R/L.
Both shear and membrane locking appear for all degrees p.
100
101
102
103
104
105
106
0
20
40
60
80
100
L/h
||θbex
−θ bh || L2
/ ||θ
bex|| L2
(%)
Rotation relative error with R/L = 103
LinearQuad.CubicQuarticQuintic
SHEARLOCKING
MEMBRANELOCKING
R/L
(a) Linear scale
100
101
102
103
104
105
106
10−4
10−3
10−2
10−1
100
101
102
L/h
||θbex
−θ bh || L2
/ ||θ
bex|| L2
(%)
Rotation relative error with R/L = 103
LinearQuad.CubicQuarticQuintic
SHEARLOCKING
R/L
MEMBRANELOCKING
(b) Logarithmic scale
Figure: One element curved thick beam: rotation relative error in L2 norm.
S. Bouabdallah, C. Adam, M. Zarroug, H. Maitournam Teratec 2014 - IGA Application to Car Crash Simulation 8 / 26

Introduction Timoshenko beams Reissner-Mindlin plates Reissner-Mindlin shells Non-linear solid shells Conclusions
Transverse shear locking
Different effects on convergence according to the couple (p,r).Degree 1: no pre-asymptotic convergence.Degree 2: slow pre-asymptotic convergence when C 0 and nopre-asymptotic convergence with few elements when C 1.Spurious constraints strengthened by the high regularity.
=⇒ Excessive bending stiffeness of the structure.
100
101
102
10−6
10−4
10−2
100
Number of elements ∝ 1 / l
||θbex
−θ bh || L2
/ ||θ
bex|| L2
(%)
Rotation relative error with L/h = 103
Linear
Quad. C0
Quad C1
Cubic C0
Cubic C1
Cubic C2
1
1
3
2
1
4
1
5
(a) Pre-asymptotic convergence withL/h = 103
100
101
102
103
10−8
10−6
10−4
10−2
100
Number of elements ∝ 1 / l
||θbex
−θ bh || L2
/ ||θ
bex|| L2
(%)
Rotation relative error with L/h = 102
Linear
Quad. C0
Quad C1
Cubic C0
Cubic C1
Cubic C2
4
1
31
4
1
3
1
1
5
21 1 2
(b) Pre-asymptotic and asymptoticconvergence with L/h = 102
Figure: Rotation relative error in L2 norm for a straight Timoshenko beam.S. Bouabdallah, C. Adam, M. Zarroug, H. Maitournam Teratec 2014 - IGA Application to Car Crash Simulation 9 / 26

Introduction Timoshenko beams Reissner-Mindlin plates Reissner-Mindlin shells Non-linear solid shells Conclusions
Mathematical framework
Based on the work in FEA of [Prathap,93].
Field-consistency paradigm in thick structural elements.
Transverse shear strain in straight beam:
γs(s) = w,s(s)− θ(s).
In the limit of an infinitely thin beam, the shear strain energy mustvanish.
=⇒ Different physical and spurious constraints are obtained according tothe couple (p,r).
Mathematical induction is performed adding elements one-by-one.
New unknowns and conditions are numbered.
An over-constrained linear system leads to numerical lockingwhereas an under-constrained system produces zero energy modes.
S. Bouabdallah, C. Adam, M. Zarroug, H. Maitournam Teratec 2014 - IGA Application to Car Crash Simulation 10 / 26

Introduction Timoshenko beams Reissner-Mindlin plates Reissner-Mindlin shells Non-linear solid shells Conclusions
1D B-Spline reduced quadrature rules
Optimal selective reduced integration schemes adapted to highregularity basis functions.
The higher the regularity is, the fewer Gauss points are needed.
Shear and membrane locking are completely removed.
Improved accuracy of curved beam B-Spline elements.
0 1
Order 3 C2
Order 3 C1
Order 3 C0
Order 2 C1
Order 2 C0
Order 1 C0
ξ = s / L
Reduced integration for transverse shear: Gauss points
100
101
102
10−6
10−4
10−2
100
Number of elements
||θex
− θ
h || L2 / |
|θex
|| L2Quadratic B−spline
C0 full
C0 selec.
C1 full
C1 selec.
1
3
21
1
4
100
101
102
10−6
10−4
10−2
100
Number of elements
||θex
− θ
h || L2 / |
|θex
|| L2
Cubic B−spline
C0 full
C0 selec.
C1 full
C1 selec.
C2 full
C2 selec.
1
1
3
1
4
5
Figure: Rotation relative error in L2 norm with full and selective reducedintegrations.
S. Bouabdallah, C. Adam, M. Zarroug, H. Maitournam Teratec 2014 - IGA Application to Car Crash Simulation 11 / 26

Introduction Timoshenko beams Reissner-Mindlin plates Reissner-Mindlin shells Non-linear solid shells Conclusions
1 IntroductionIndustrial contextNumerical locking
2 Timoshenko beamsPure bending problemMembrane and transverse shear locking1D B-Spline reduced quadrature rules
3 Reissner-Mindlin platesPure bending problem2D B-Spline reduced quadrature rules
4 Reissner-Mindlin shellsShell modelShell obstacle course
5 Non-linear solid shellsBenchmark problems
6 Conclusions
S. Bouabdallah, C. Adam, M. Zarroug, H. Maitournam Teratec 2014 - IGA Application to Car Crash Simulation 12 / 26

Introduction Timoshenko beams Reissner-Mindlin plates Reissner-Mindlin shells Non-linear solid shells Conclusions
Pure bending problem
Same behaviours as with beams.
High regularity wanted for more accurate results with fewer controlpoints.
Need to unlock B-Splines especially when C p−1 regularity.
Possibility to extend integration rules from beams to plates andshells.
0 5 10 15
0
20
40
60
80
100
Number of elements in each direction
wc /
wcre
f (%
)
Vertical displacement of point C: concentrated load
Reference
Linear C0 L/h = 103
Linear C0 L/h = 105
Quad. C0 L/h = 103
Quad. C0 L/h = 105
Quad. C1 L/h = 103
Quad. C1 L/h = 105
Figure: Central deflection of a simply supported plate (L/h = 103, 105).
S. Bouabdallah, C. Adam, M. Zarroug, H. Maitournam Teratec 2014 - IGA Application to Car Crash Simulation 13 / 26

Introduction Timoshenko beams Reissner-Mindlin plates Reissner-Mindlin shells Non-linear solid shells Conclusions
Pure bending problem
Same behaviours as with beams.
High regularity wanted for more accurate results with fewer controlpoints.
Need to unlock B-Splines especially when C p−1 regularity.
Possibility to extend integration rules from beams to plates andshells.
0 5 10 15
0
20
40
60
80
100
Number of elements in each direction
wc /
wcre
f (%
)
Vertical displacement of point C: uniform pressure
Reference
Linear C0 L/h = 103
Linear C0 L/h = 105
Quad. C0 L/h = 103
Quad. C0 L/h = 105
Quad. C1 L/h = 103
Quad. C1 L/h = 105
Figure: Central deflection of a simply supported plate (L/h = 103, 105).
S. Bouabdallah, C. Adam, M. Zarroug, H. Maitournam Teratec 2014 - IGA Application to Car Crash Simulation 13 / 26

Introduction Timoshenko beams Reissner-Mindlin plates Reissner-Mindlin shells Non-linear solid shells Conclusions
2D B-Spline reduced quadrature rules
Uni-dimensional B-Spline-based reduced quadrature rules extendedto bi-dimensional rules by tensor product.
The high regularity lowers the required number of Gauss points.
Hourglass modes are suppressed using additional quadrature pointsin boundary elements, where the control points accumulate.
0 0.25 0.5 0.75 1 0
0.25
0.5
0.75
1
B−spline selective integration: Gauss points
ξ
η
(a) Quadratic C 1
0 0.25 0.5 0.75 10
0.25
0.5
0.75
1
B−spline selective integration: Gauss points
ξ
η
(b) Cubic C 1
0 0.25 0.5 0.75 1 0
0.25
0.5
0.75
1
B−spline selective integration: Gauss points
ξ
η
(c) Cubic C 2
Figure: B-Spline selective integration quadrature rules and central deflection.
S. Bouabdallah, C. Adam, M. Zarroug, H. Maitournam Teratec 2014 - IGA Application to Car Crash Simulation 14 / 26

Introduction Timoshenko beams Reissner-Mindlin plates Reissner-Mindlin shells Non-linear solid shells Conclusions
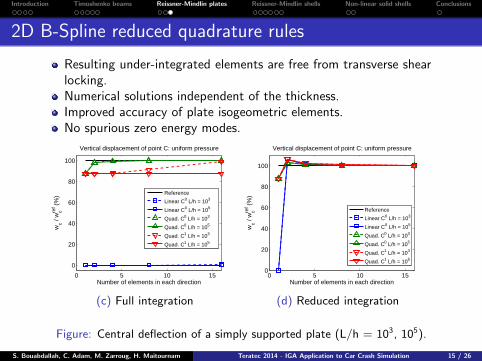
2D B-Spline reduced quadrature rules
Resulting under-integrated elements are free from transverse shearlocking.Numerical solutions independent of the thickness.Improved accuracy of plate isogeometric elements.No spurious zero energy modes.
0 5 10 15
0
20
40
60
80
100
Number of elements in each direction
wc /
wcre
f (%
)
Vertical displacement of point C: concentrated load
Reference
Linear C0 L/h = 103
Linear C0 L/h = 105
Quad. C0 L/h = 103
Quad. C0 L/h = 105
Quad. C1 L/h = 103
Quad. C1 L/h = 105
(a) Full integration
0 5 10 150
20
40
60
80
100
Number of elements in each direction
wc /
wcre
f (%
)
Vertical displacement of point C: concentrated load
Reference
Linear C0 L/h = 103
Linear C0 L/h = 105
Quad. C0 L/h = 103
Quad. C0 L/h = 105
Quad. C1 L/h = 103
Quad. C1 L/h = 105
(b) Reduced integration
Figure: Central deflection of a simply supported plate (L/h = 103, 105).
S. Bouabdallah, C. Adam, M. Zarroug, H. Maitournam Teratec 2014 - IGA Application to Car Crash Simulation 15 / 26
Introduction Timoshenko beams Reissner-Mindlin plates Reissner-Mindlin shells Non-linear solid shells Conclusions
2D B-Spline reduced quadrature rules
Resulting under-integrated elements are free from transverse shearlocking.Numerical solutions independent of the thickness.Improved accuracy of plate isogeometric elements.No spurious zero energy modes.
0 5 10 15
0
20
40
60
80
100
Number of elements in each direction
wc /
wcre
f (%
)
Vertical displacement of point C: uniform pressure
Reference
Linear C0 L/h = 103
Linear C0 L/h = 105
Quad. C0 L/h = 103
Quad. C0 L/h = 105
Quad. C1 L/h = 103
Quad. C1 L/h = 105
(c) Full integration
0 5 10 150
20
40
60
80
100
Number of elements in each direction
wc /
wcre
f (%
)
Vertical displacement of point C: uniform pressure
Reference
Linear C0 L/h = 103
Linear C0 L/h = 105
Quad. C0 L/h = 103
Quad. C0 L/h = 105
Quad. C1 L/h = 103
Quad. C1 L/h = 105
(d) Reduced integration
Figure: Central deflection of a simply supported plate (L/h = 103, 105).
S. Bouabdallah, C. Adam, M. Zarroug, H. Maitournam Teratec 2014 - IGA Application to Car Crash Simulation 15 / 26

Introduction Timoshenko beams Reissner-Mindlin plates Reissner-Mindlin shells Non-linear solid shells Conclusions
1 IntroductionIndustrial contextNumerical locking
2 Timoshenko beamsPure bending problemMembrane and transverse shear locking1D B-Spline reduced quadrature rules
3 Reissner-Mindlin platesPure bending problem2D B-Spline reduced quadrature rules
4 Reissner-Mindlin shellsShell modelShell obstacle course
5 Non-linear solid shellsBenchmark problems
6 Conclusions
S. Bouabdallah, C. Adam, M. Zarroug, H. Maitournam Teratec 2014 - IGA Application to Car Crash Simulation 16 / 26

Introduction Timoshenko beams Reissner-Mindlin plates Reissner-Mindlin shells Non-linear solid shells Conclusions
Shell model
Reissner-Mindlin shell model obtained froma degenerated three-dimensional model.
First-order kinematic description throughthe thickness with transverse shear.
Exact geometry of the shell defined by
x(ξ) =nm∑A=1
RA(ξ, η)XA +h
2ζn(ξ, η).
Interpolated displacements described by
u(ξ) =nm∑A=1
RA
(UA +
h
2ζθA ∧ n
).
S. Bouabdallah, C. Adam, M. Zarroug, H. Maitournam Teratec 2014 - IGA Application to Car Crash Simulation 17 / 26

Introduction Timoshenko beams Reissner-Mindlin plates Reissner-Mindlin shells Non-linear solid shells Conclusions
Characterization of the normal
Several possibilities:1 Exact normal:
n =x,ξ ∧ x,η
||x,ξ ∧ x,η||2.
2 Collocated normal:
n = nA ∀A ∈ [|1, nm|].a. nA defined by the orthogonal projection of the associated control
point XA onto the mid-surface of the shell,b. nA defined by a uniform distribution of the shell normals in the
parametric space,c. nA defined at the Greville abscissae in the parametric space.
Exact normal formulation is incompatible with reduced integration.
Collocation at Greville abscissae results in good compromise betweenaccuracy and computation time.
S. Bouabdallah, C. Adam, M. Zarroug, H. Maitournam Teratec 2014 - IGA Application to Car Crash Simulation 18 / 26

Introduction Timoshenko beams Reissner-Mindlin plates Reissner-Mindlin shells Non-linear solid shells Conclusions
Shell obstacle course problems
Evaluate time efficiency and accuracy of the proposedunder-integrated elements.
Linear elasticity benchmark problems.
Bending dominated problems: transverse shear and membranelocking.
(a) Scordelis-Lo roof (b) Pinched cylinder (c) Pinched hemisphere
Figure: The shell obstacle course: problem descriptions and data.
S. Bouabdallah, C. Adam, M. Zarroug, H. Maitournam Teratec 2014 - IGA Application to Car Crash Simulation 19 / 26

Introduction Timoshenko beams Reissner-Mindlin plates Reissner-Mindlin shells Non-linear solid shells Conclusions
Accuracy
0 5 10 15 20 25 30 35
0
20
40
60
80
100
Number of elements per side
wB /
wBre
f (%
)
Vertical displacement of point B : full integration
Reference
Linear C0
Quad. C0
Quad. C1
Cubic C0
Cubic C1
Cubic C2
(a) Roof: full
0 5 10 15 20 25 30 35
0
20
40
60
80
100
Number of elements per side
wC
/ w
Cref (
%)
Vertical displacement of point C: full integration
Reference
Linear C0
Quad. C0
Quad. C1
Cubic C0
Cubic C1
Cubic C2
(b) Cylinder: full
0 5 10 15 20 25 30 35
0
20
40
60
80
100
Number of elements per side
u A /
u Aref (
%)
Horizontal displacement of point A: full integration
Reference
Linear C0
Quad. C0
Quad. C1
Cubic C0
Cubic C1
Cubic C2
(c) Hemisphere: full
0 5 10 15 20 25 30 35
0
20
40
60
80
100
Number of elements per side
wB /
wBre
f (%
)
Vertical displacement of point B : reduced integration
Reference
Linear C0
Quad. C0
Quad. C1
Cubic C0
Cubic C1
Cubic C2
(d) Roof: reduced
0 5 10 15 20 25 30 35
0
20
40
60
80
100
Number of elements per side
wC
/ w
Cref (
%)
Vertical displacement of point C: reduced integration
Reference
Linear C0
Quad. C0
Quad. C1
Cubic C0
Cubic C1
Cubic C2
(e) Cylinder: reduced
0 5 10 15 20 25 30 35
0
20
40
60
80
100
Number of elements per side
u A /
u Aref (
%)
Horizontal displacement of point A: reduced integration
Reference
Linear C0
Quad. C0
Quad. C1
Cubic C0
Cubic C1
Cubic C2
(f) Hemisphere: reduced
Figure: Shell obstacle course: displacement convergence
S. Bouabdallah, C. Adam, M. Zarroug, H. Maitournam Teratec 2014 - IGA Application to Car Crash Simulation 20 / 26

Introduction Timoshenko beams Reissner-Mindlin plates Reissner-Mindlin shells Non-linear solid shells Conclusions
Time efficiency
10−2
10−1
100
101
0
20
40
60
80
100
Computational time (s)
wB /
wBre
f (%
)
Vertical displacement of point B : full integration
Reference
Linear C0
Quad. C0
Quad. C1
Cubic C0
Cubic C1
CubicC2
(a) Roof: full
10−2
10−1
100
101
0
20
40
60
80
100
Computational time (s)
wC
/ w
Cref (
%)
Vertical displacement of point C: full integratione
Reference
Linear C0
Quad. C0
Quad. C1
Cubic C0
Cubic C1
Cubic C2
(b) Cylinder: full
10−2
10−1
100
101
0
20
40
60
80
100
Computational time (s)
u A /
u Aref (
%)
Horizontal displacement of point A: full integration
Reference
Linear C0
Quad. C0
Quad. C1
Cubic C0
Cubic C1
Cubic C2
(c) Hemisphere: full
10−2
10−1
100
101
0
20
40
60
80
100
Computational time (s)
wB /
wBre
f (%
)
Vertical displacement of point B : reduced integration
Reference
Linear C0
Quad. C0
Quad. C1
Cubic C0
Cubic C1
Cubic C2
(d) Roof: reduced
10−2
10−1
100
101
0
20
40
60
80
100
Computational time (s)
wC
/ w
Cref (
%)
Vertical displacement of point C: reduced integration
Reference
Linear C0
Quad. C0
Quad. C1
Cubic C0
Cubic C1
Cubic C2
(e) Cylinder: reduced
10−2
10−1
100
101
0
20
40
60
80
100
Computational time (s)
u A /
u Aref (
%)
Horizontal displacement of point A: reduced integration
Reference
Linear C0
Quad. C0
Quad. C1
Cubic C0
Cubic C1
Cubic C2
(f) Hemisphere: reduced
Figure: Shell obstacle course: displacement convergence
S. Bouabdallah, C. Adam, M. Zarroug, H. Maitournam Teratec 2014 - IGA Application to Car Crash Simulation 21 / 26

Introduction Timoshenko beams Reissner-Mindlin plates Reissner-Mindlin shells Non-linear solid shells Conclusions
Total number of Gauss points
Lagrange-based quadrature:
nbendingGP =
(e(⌈
2p+12
⌉))2and nshear
GP =(e(⌈
2p+12
⌉− 1
))2.
B-Spline-based quadrature:
nbendingGP = nshear
GP =(e(⌈
2p+12
⌉− 1− r
)+ 2r
)2.
Computational effort depends on the difference p − r whenperforming B-Spline-based reduced integration.Speed up factor greater than 5 (resp. 6) is reached with theunder-integrated quadratic (resp. cubic) C p−1 elements.
0 5 10 15 20 25 30 350
5
10
15
20
Computation time: full integration
Number of elements per side
Com
puta
tion
time
(s)
Linear C0
Quad. C0
Quad. C1
Cubic C0
Cubic C1
Cubic C2
(a) Full integration
0 5 10 15 20 25 30 350
5
10
15
20
Computation time: selective integration
Number of elements per side
Com
puta
tion
time
(s)
Linear C0
Quad. C0
Quad. C1
Cubic C0
Cubic C1
Cubic C2
(b) Selective integration
Figure: Computation time for the pinched cylinder problem.
S. Bouabdallah, C. Adam, M. Zarroug, H. Maitournam Teratec 2014 - IGA Application to Car Crash Simulation 22 / 26

Introduction Timoshenko beams Reissner-Mindlin plates Reissner-Mindlin shells Non-linear solid shells Conclusions
1 IntroductionIndustrial contextNumerical locking
2 Timoshenko beamsPure bending problemMembrane and transverse shear locking1D B-Spline reduced quadrature rules
3 Reissner-Mindlin platesPure bending problem2D B-Spline reduced quadrature rules
4 Reissner-Mindlin shellsShell modelShell obstacle course
5 Non-linear solid shellsBenchmark problems
6 Conclusions
S. Bouabdallah, C. Adam, M. Zarroug, H. Maitournam Teratec 2014 - IGA Application to Car Crash Simulation 23 / 26
Introduction Timoshenko beams Reissner-Mindlin plates Reissner-Mindlin shells Non-linear solid shells Conclusions
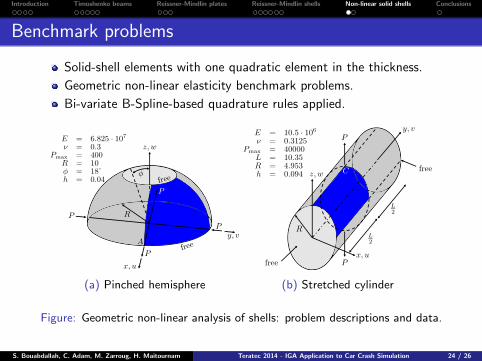
Benchmark problems
Solid-shell elements with one quadratic element in the thickness.
Geometric non-linear elasticity benchmark problems.
Bi-variate B-Spline-based quadrature rules applied.
(a) Pinched hemisphere (b) Stretched cylinder
Figure: Geometric non-linear analysis of shells: problem descriptions and data.
S. Bouabdallah, C. Adam, M. Zarroug, H. Maitournam Teratec 2014 - IGA Application to Car Crash Simulation 24 / 26
Introduction Timoshenko beams Reissner-Mindlin plates Reissner-Mindlin shells Non-linear solid shells Conclusions
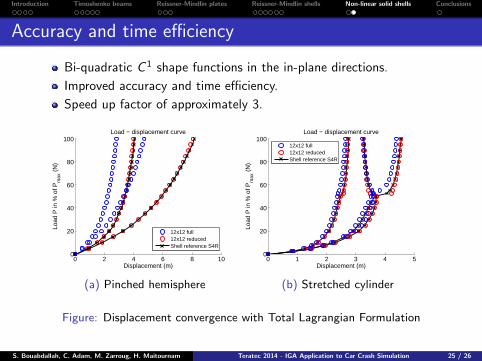
Accuracy and time efficiency
Bi-quadratic C 1 shape functions in the in-plane directions.
Improved accuracy and time efficiency.
Speed up factor of approximately 3.
0 2 4 6 8 100
20
40
60
80
100
Displacement (m)
Load
P in
% o
f Pm
ax (
N)
Load − displacement curve
12x12 full12x12 reducedShell reference S4R
(a) Pinched hemisphere
0 1 2 3 4 50
20
40
60
80
100
Displacement (m)
Load
P in
% o
f Pm
ax (
N)
Load − displacement curve
12x12 full12x12 reducedShell reference S4R
(b) Stretched cylinder
Figure: Displacement convergence with Total Lagrangian Formulation
S. Bouabdallah, C. Adam, M. Zarroug, H. Maitournam Teratec 2014 - IGA Application to Car Crash Simulation 25 / 26
Introduction Timoshenko beams Reissner-Mindlin plates Reissner-Mindlin shells Non-linear solid shells Conclusions
Conclusions
Severe numerical locking appear in quadratic and cubic C p−1
elements.
=⇒ Reduced integration to improve the performances of IG elements.
Classical reduced/selective quadrature rules remove numericallocking in C 0 elements only.
Mathematical framework to define B-Spline-based reduced 1Dquadrature rules.
Extension to 2D quadrature rules by tensor product.
=⇒ Efficient thick shell elements obtained as in FEA.
Improved accuracy and time efficiency.
Computational cost depends on the difference p − r .
S. Bouabdallah, C. Adam, M. Zarroug, H. Maitournam Teratec 2014 - IGA Application to Car Crash Simulation 26 / 26