interaction design - tu/e · interaction design specification prof ... mathematical structures for...
TRANSCRIPT
Interaction DesignSpecification
Prof. Dr. Matthias RauterbergFaculty Industrial Design
Technical University of Eindhoven
21-February-2008
(c) M. Rauterberg, TU/e 2/59
Key references/literature:
• Lifecycle Model:Mayhew, D. (1999), The usability engineering lifecycle. Morgan Kaufmann. [ISBN 1-55860-661-4]
• STD:Gersting, J.L. (1999), Mathematical Structures for Computer Science. 4th Edition, Freeman. [ISBN: 0716783061]
• PN:Reisig, W. (1992), A Primer in Petri Net Design. Springer. [ISBN: 0387520449]
• GOMS: Card S, Moran T, & Newell A (1983), The psychology of human computer interaction, Lawrence Erlbaum Assoc, Hillsdale, NJ
• UAN:Hartson, H. R., Siochi, A.C., & Hix, D. (1990), "The UAN: A User-Oriented Representation for Direct Manipulation Interface Designs", ACM Transactions of Information Systems, 8(3), pp. 181-203.
• Hix, D. & Hartson, H. R., (1993) “Developing User Interfaces”, Wiley. (Chapter 6 and 7)
• Hartson, H.R. & Gray P. D. (1992), "Temporal Aspects of Tasks in the User Action Notation”, Human Computer Interaction, 7(92), pp. 1-45.
(c) M. Rauterberg, TU/e 3/59
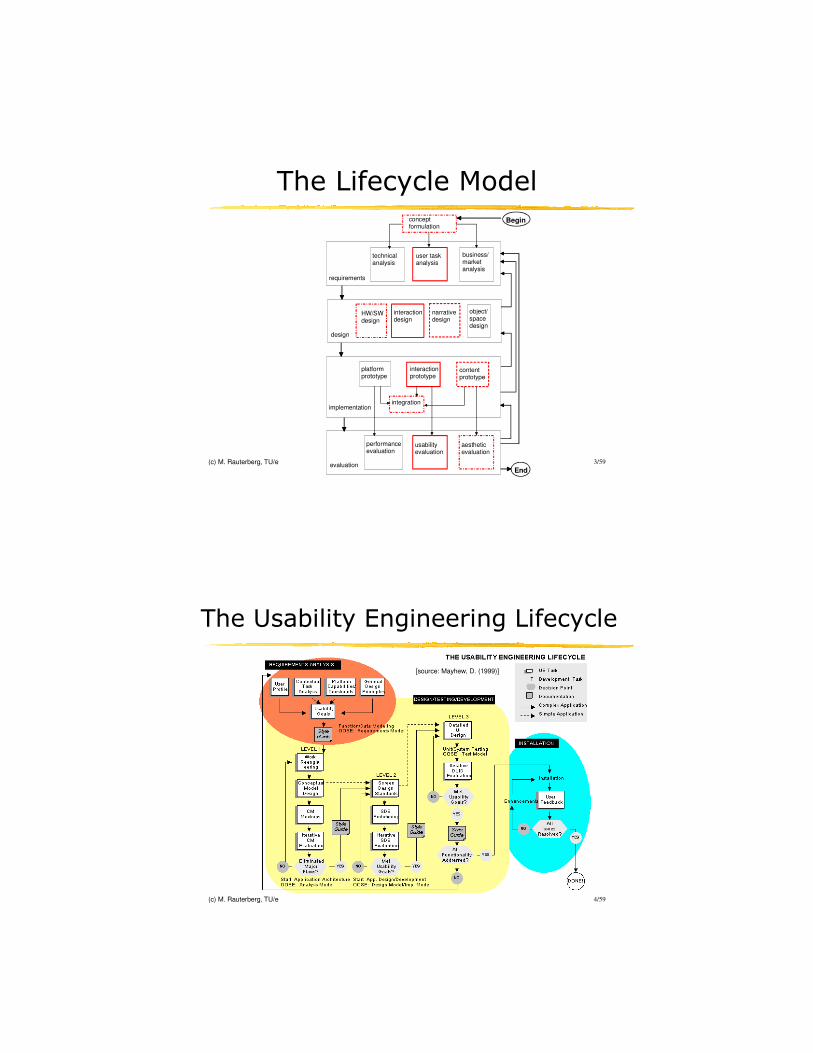
The Lifecycle Model
requirements
design
implementation
evaluation
Begin
End
conceptformulation
technicalanalysis
user taskanalysis
business/marketanalysis
HW/SWdesign
interactiondesign
narrativedesign
object/spacedesign
platformprototype
interactionprototype
contentprototype
integration
performanceevaluation
usabilityevaluation
aestheticevaluation
(c) M. Rauterberg, TU/e 4/59
The Usability Engineering Lifecycle
[source: Mayhew, D. (1999)]
(c) M. Rauterberg, TU/e 5/59
User Interaction Specification
• Many approaches/notations to specifying interaction
– State-Transition-Diagrams (STD)
– Petri Nets (PN)
– Goal-Operation-Methods-Selections (GOMS)
– User Action Notation (UAN)
• Aim to provide more detailed descriptions of interaction between user and system
• Refinement of task model in terms closer to system
• Provides medium of discussion and review between human factors designers and systems developers
(c) M. Rauterberg, TU/e 6/59
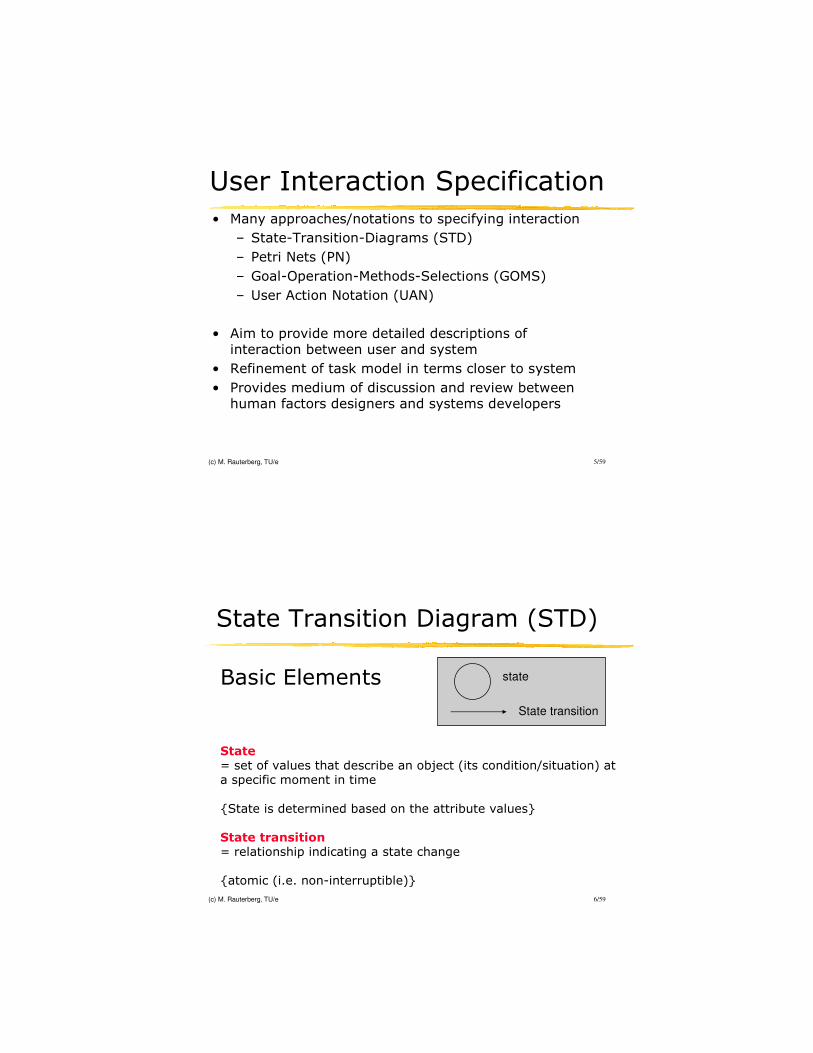
State Transition Diagram (STD)
state
State transition
Basic Elements
State= set of values that describe an object (its condition/situation) at a specific moment in time
{State is determined based on the attribute values}
State transition= relationship indicating a state change
{atomic (i.e. non-interruptible)}
(c) M. Rauterberg, TU/e 7/59
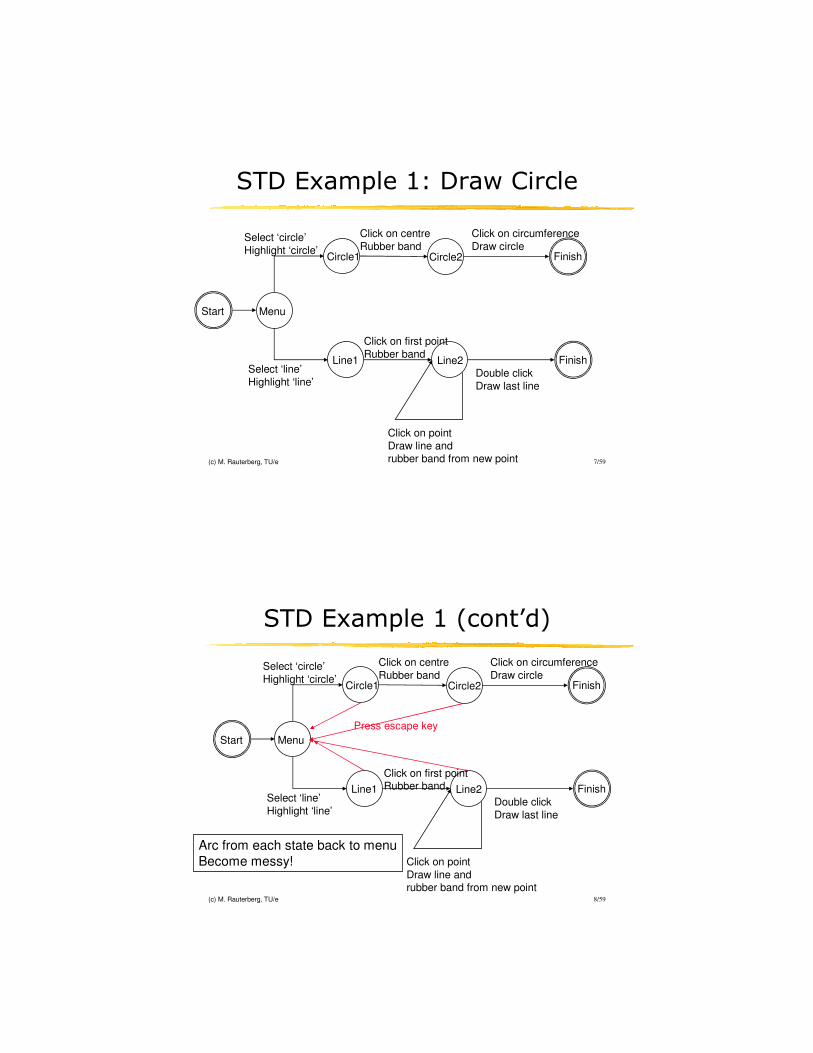
STD Example 1: Draw Circle
Start Menu
Circle1 Circle2 Finish
Line1 Line2 Finish
Select ‘circle’
Highlight ‘circle’
Select ‘line’
Highlight ‘line’
Click on centre
Rubber band
Click on first point
Rubber band
Click on circumference
Draw circle
Double click
Draw last line
Click on point
Draw line andrubber band from new point
(c) M. Rauterberg, TU/e 8/59
STD Example 1 (cont’d)
Start Menu
Circle1 Circle2 Finish
Line1 Line2 Finish
Select ‘circle’
Highlight ‘circle’
Select ‘line’
Highlight ‘line’
Click on centre
Rubber band
Click on first pointRubber band
Click on circumference
Draw circle
Double click
Draw last line
Click on point
Draw line andrubber band from new point
Press escape key
Arc from each state back to menu
Become messy!
(c) M. Rauterberg, TU/e 9/59
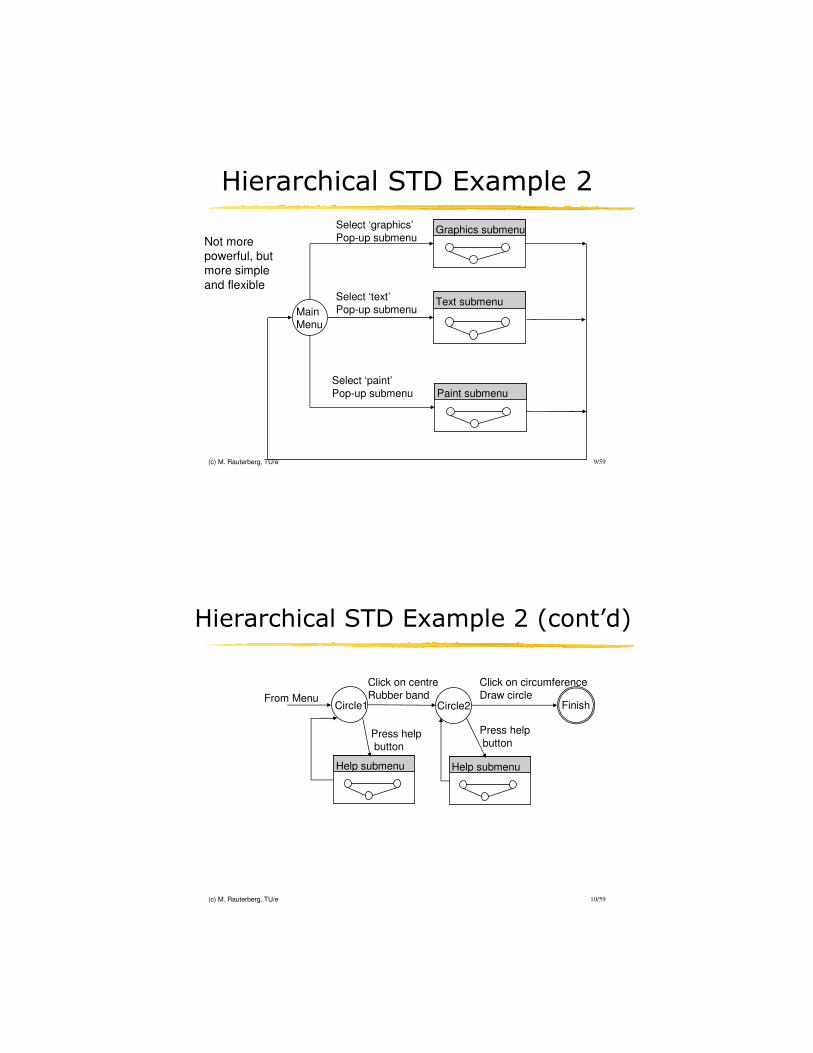
Hierarchical STD Example 2
MainMenu
Select ‘graphics’
Pop-up submenuGraphics submenu
Text submenu
Paint submenu
Select ‘text’
Pop-up submenu
Select ‘paint’
Pop-up submenu
Not more
powerful, but
more simple
and flexible
(c) M. Rauterberg, TU/e 10/59
Hierarchical STD Example 2 (cont’d)
Circle1 Circle2 FinishFrom Menu
Click on centre
Rubber band
Click on circumference
Draw circle
Help submenu Help submenu
Press helpbutton
Press help
button
(c) M. Rauterberg, TU/e 11/59
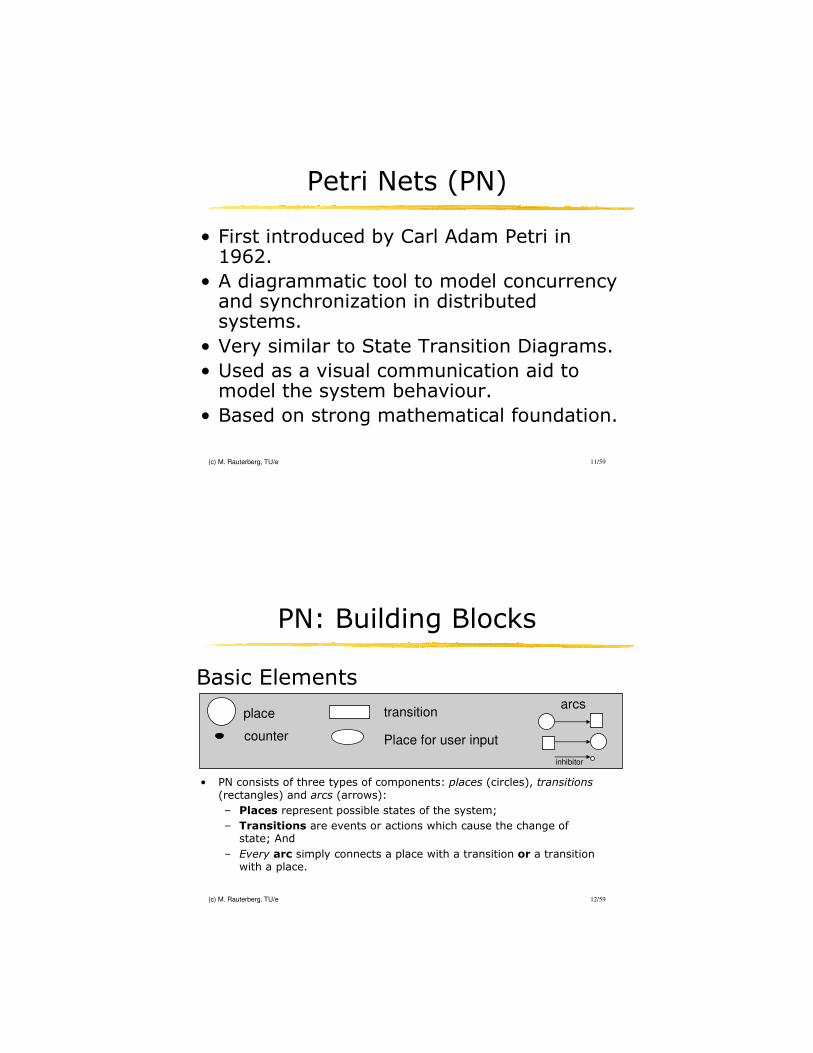
Petri Nets (PN)
• First introduced by Carl Adam Petri in 1962.
• A diagrammatic tool to model concurrency and synchronization in distributed systems.
• Very similar to State Transition Diagrams.
• Used as a visual communication aid to model the system behaviour.
• Based on strong mathematical foundation.
(c) M. Rauterberg, TU/e 12/59
PN: Building Blocks
place
counter
transition
Place for user input
Basic Elements
• PN consists of three types of components: places (circles), transitions(rectangles) and arcs (arrows):
– Places represent possible states of the system;
– Transitions are events or actions which cause the change of state; And
– Every arc simply connects a place with a transition or a transition with a place.
arcs
inhibitor
(c) M. Rauterberg, TU/e 13/59
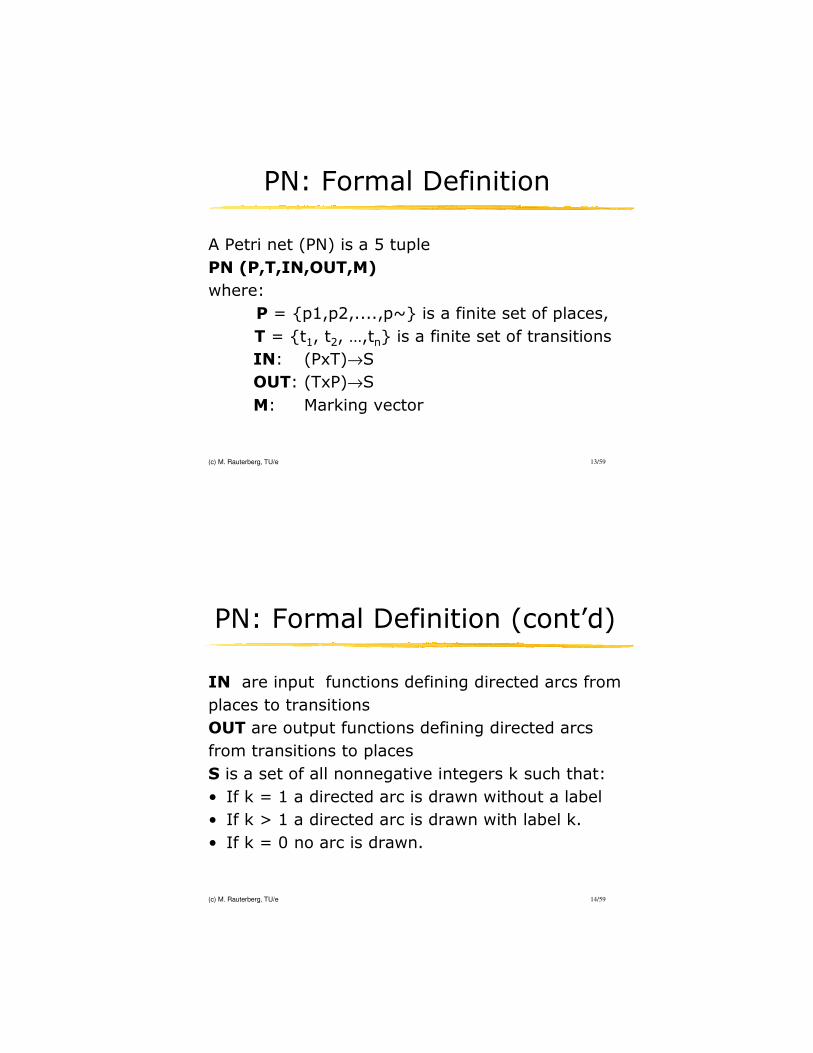
PN: Formal Definition
A Petri net (PN) is a 5 tuple
PN (P,T,IN,OUT,M)
where:
P = {p1,p2,....,p~} is a finite set of places,
T = {t1, t2, …,tn} is a finite set of transitions
IN: (PxT)→S
OUT: (TxP)→S
M: Marking vector
(c) M. Rauterberg, TU/e 14/59
PN: Formal Definition (cont’d)
IN are input functions defining directed arcs from
places to transitions
OUT are output functions defining directed arcs
from transitions to places
S is a set of all nonnegative integers k such that:
• If k = 1 a directed arc is drawn without a label
• If k > 1 a directed arc is drawn with label k.
• If k = 0 no arc is drawn.
(c) M. Rauterberg, TU/e 15/59
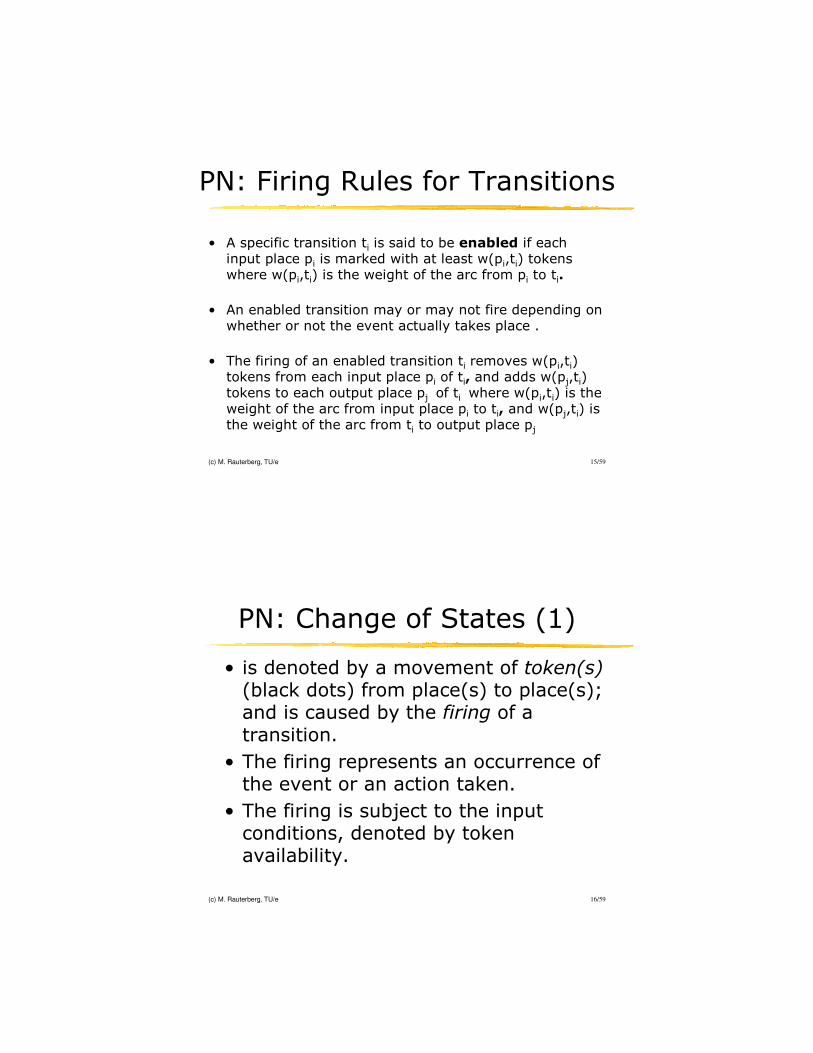
PN: Firing Rules for Transitions
• A specific transition ti is said to be enabled if each input place pi is marked with at least w(pi,ti) tokens where w(pi,ti) is the weight of the arc from pi to ti.
• An enabled transition may or may not fire depending on whether or not the event actually takes place .
• The firing of an enabled transition ti removes w(pi,ti)tokens from each input place pi of ti, and adds w(pj,ti) tokens to each output place pj of ti where w(pi,ti) is the weight of the arc from input place pi to ti, and w(pj,ti) is the weight of the arc from ti to output place pj
(c) M. Rauterberg, TU/e 16/59
PN: Change of States (1)
• is denoted by a movement of token(s)(black dots) from place(s) to place(s); and is caused by the firing of a transition.
• The firing represents an occurrence of the event or an action taken.
• The firing is subject to the input conditions, denoted by token availability.
(c) M. Rauterberg, TU/e 17/59
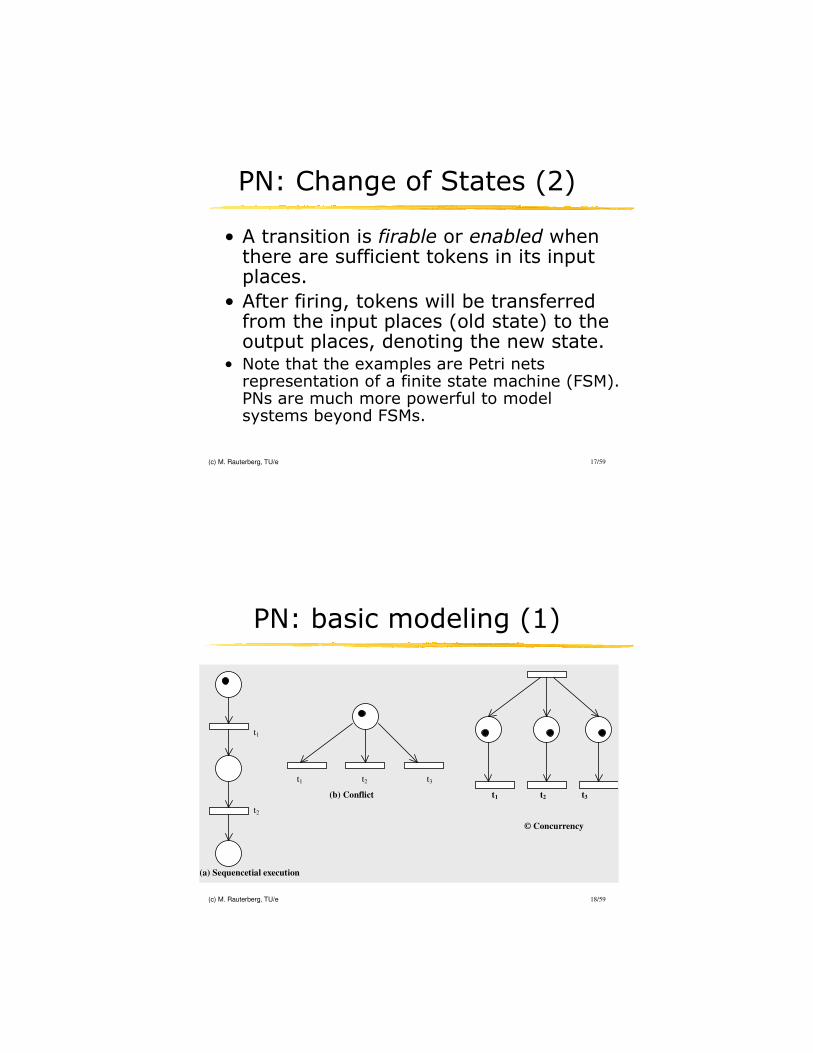
PN: Change of States (2)
• A transition is firable or enabled when there are sufficient tokens in its input places.
• After firing, tokens will be transferred from the input places (old state) to the output places, denoting the new state.
• Note that the examples are Petri nets representation of a finite state machine (FSM). PNs are much more powerful to model systems beyond FSMs.
(c) M. Rauterberg, TU/e 18/59
PN: basic modeling (1)
t1
t1 t2 t3
(b) Conflict t1 t2 t3
t2
© Concurrency
(a) Sequencetial execution
(c) M. Rauterberg, TU/e 19/59
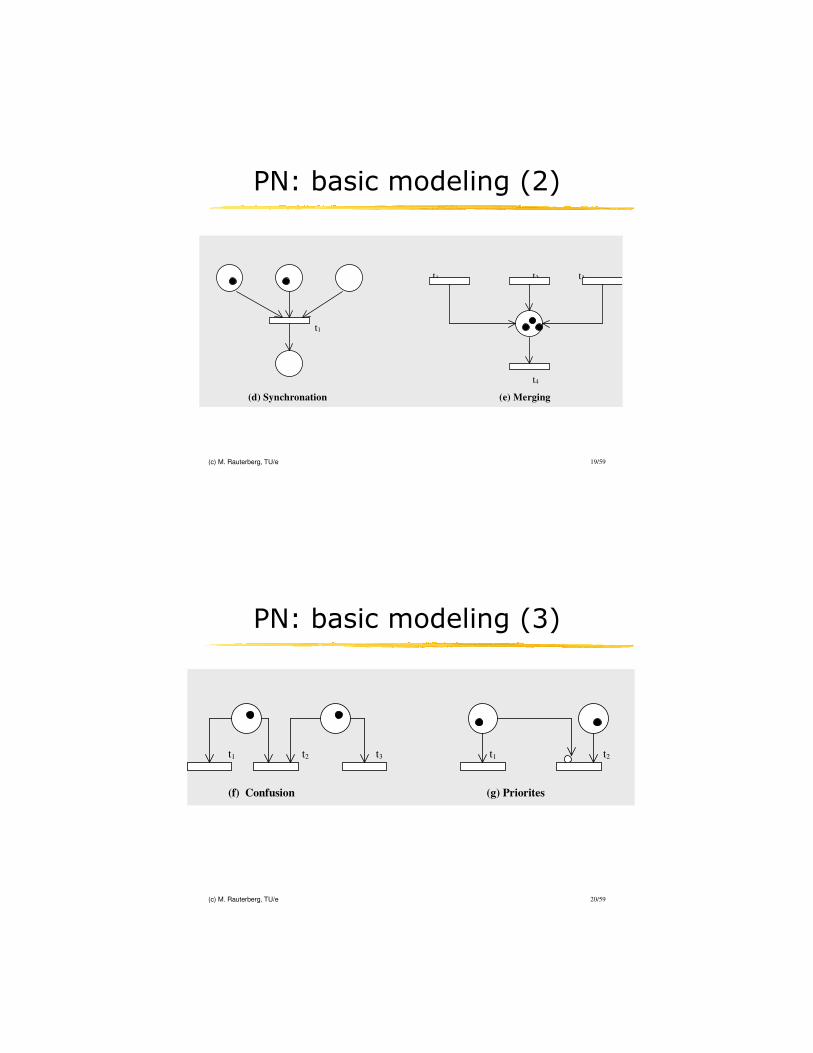
PN: basic modeling (2)
t1 t2 t3
t1
t4
(d) Synchronation (e) Merging
(c) M. Rauterberg, TU/e 20/59
PN: basic modeling (3)
t1 t2 t3 t1 t2
(f) Confusion (g) Priorites
(c) M. Rauterberg, TU/e 21/59
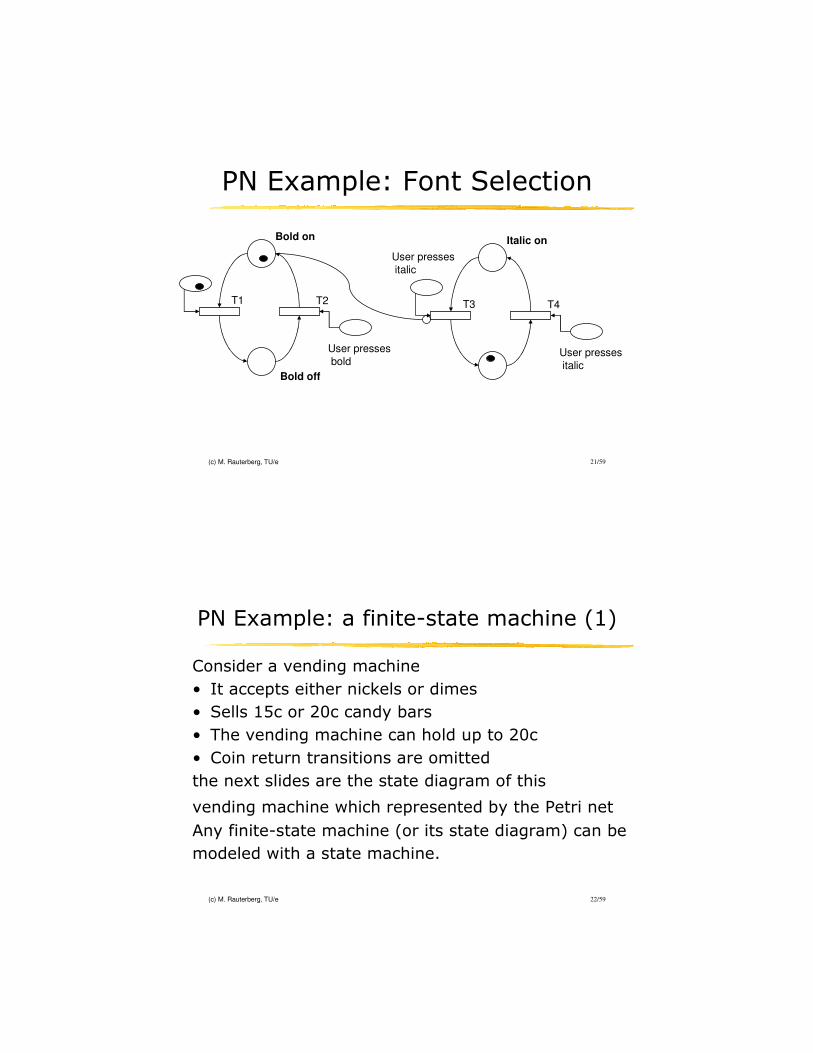
PN Example: Font Selection
Bold on
Bold off
User presses
bold
T1 T2
Italic on
User presses
italic
T3 T4
User presses
italic
(c) M. Rauterberg, TU/e 22/59
PN Example: a finite-state machine (1)
Consider a vending machine
• It accepts either nickels or dimes
• Sells 15c or 20c candy bars
• The vending machine can hold up to 20c
• Coin return transitions are omitted
the next slides are the state diagram of this
vending machine which represented by the Petri net
Any finite-state machine (or its state diagram) can be
modeled with a state machine.
(c) M. Rauterberg, TU/e 23/59
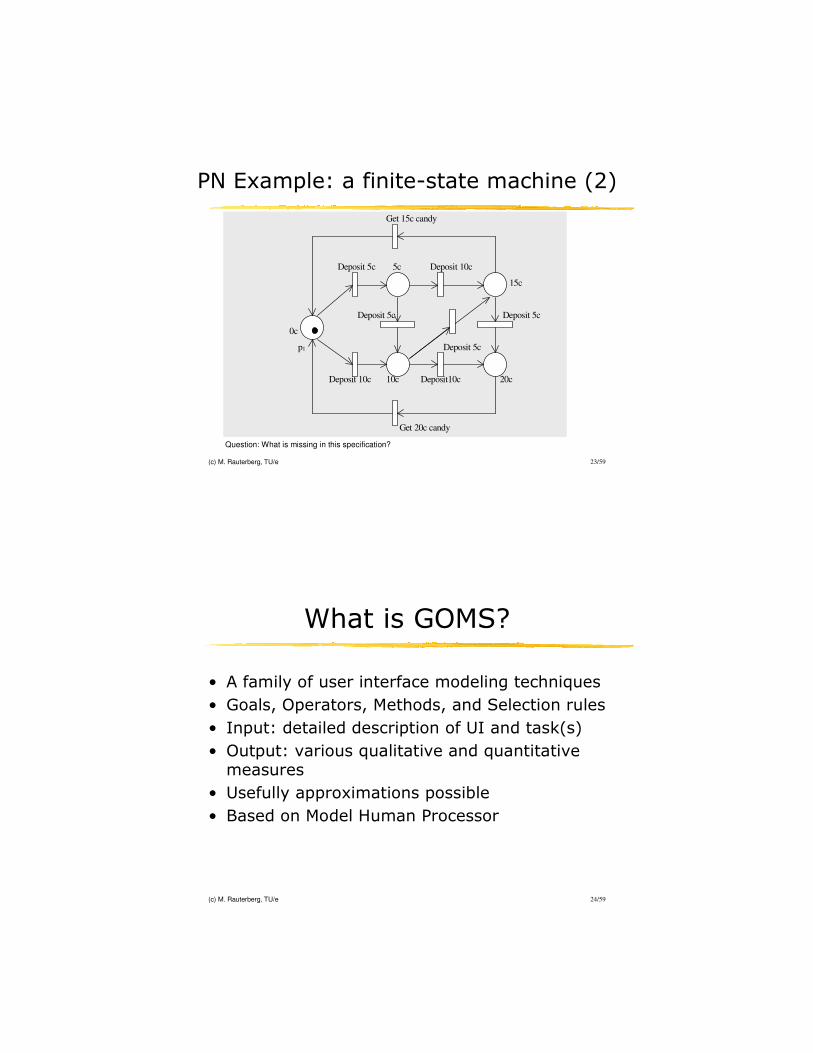
PN Example: a finite-state machine (2)
Get 15c candy
Deposit 5c 5c Deposit 10c
15c
Deposit 5c Deposit 5c
0c
p1 Deposit 5c
Deposit 10c 10c Deposit10c 20c
Get 20c candy
Question: What is missing in this specification?
(c) M. Rauterberg, TU/e 24/59
What is GOMS?
• A family of user interface modeling techniques
• Goals, Operators, Methods, and Selection rules
• Input: detailed description of UI and task(s)
• Output: various qualitative and quantitative measures
• Usefully approximations possible
• Based on Model Human Processor
(c) M. Rauterberg, TU/e 25/59
Members of GOMS Family
• Keystroke-Level Model (KLM) -[see Card, Moran, Newell (1983)]
• Natural GOMS Language (NGOMSL) -[see Kieras (1988+)]
• Critical Path Method or Cognitive, Perceptual, and Motor GOMS (CPM-GOMS)[see John (1990+)]
(c) M. Rauterberg, TU/e 26/59
What GOMS can model
• Task must be goal-directed
– Some activities are more goal-directed than others
– Even creative activities contain goal-directed tasks
• Task must a routine cognitive skill - as opposed to problem solving as in Cognitive Walkthrough
• Serial and parallel tasks
(c) M. Rauterberg, TU/e 27/59
GOMS Output
• Functionality coverage and consistency
– Does User-Interface contain needed functions?
– Are similar tasks performed similarly? (NGOMSL only?)
• Operator sequence
– In what order are individual operations done?
– Abstraction of operations may vary among models
(c) M. Rauterberg, TU/e 28/59
GOMS Output (cont’d)
• Execution time
– By expert
– Very good rank ordering
– Absolute accuracy ~10-20%
• Procedure learning time (NGOMSL only)
– Accurate for relative comparison only
– Does not include time for learning domain knowledge
• Error recovery
(c) M. Rauterberg, TU/e 29/59
Applications of GOMS
• Compare User-Interface designs
• Profiling
• Sensitivity and parametric analysis
• Building a help system
– GOMS modeling makes user tasks and goals explicit
– Can suggest questions users will ask and the answers
(c) M. Rauterberg, TU/e 30/59
Other GOMS techniques
• NGOMSL
– Regularized level of detail
– Formal syntax, so computer interpretable
– Gives learning times
• CPM-GOMS
– Closer to level of Model Human Processor
– Much more time consuming to generate
– Can model parallel activities
(c) M. Rauterberg, TU/e 31/59
GOMS Approach
Goals are what the user wants to achieve
Operators are basic actions user performs
Methods: decomposition of a goal into subgoals/operators
Selection means of choosing between competing methods
(c) M. Rauterberg, TU/e 32/59
GOMS notation
Basic Elements
GOMS is a textual notation formalism.[to make it as clear as possible, from now on all pre-specified GOMS terms are in red!All symbols in blue are use as a meta-syntax defined by Backus-Naur-form (BNF)]
Goal: followed by name of the [sub]goal (e.g. goal: read-text)Op[eration]:
followed by name for the operations (e.g. op: write-textor operation:write-text)
Method:followed by name for the defined sequence of operations plus all these operationsSelection[ rule]:followed by name for the rule plus conditions for method selection
(c) M. Rauterberg, TU/e 33/59
Concept: Goals
• Something the user wants to achieve
• Examples:
goal: go-to-airport
goal: delete-File
goal: create-directory
• Hierarchical structure
– may require many subgoals
(c) M. Rauterberg, TU/e 34/59
Concept: Methods
• Sequence of steps to accomplish a goal
– goal decomposition
– can include other goals
• Assumes method is learned & routine
• Example
method: drag-file-to-trashop: select-an-object
op: click-on-objectop: drag-object-to-trash
(c) M. Rauterberg, TU/e 35/59
Concept: Operators
• Specific actions (small scale or atomic)
• Lowest level of analysis– can associate with times
• Examplesop: Locate-icon-for-item-on-screen
op: Move-cursor-to-item
op: Hold-mouse-button-down
op: Locate-destination-icon
op: User-reads-the-dialog-box
(c) M. Rauterberg, TU/e 36/59
Concept: Selection Rules
• If [more than one method to accomplish a goal] (Selection rule)Then (method or operation to use)
• ExamplesIF (condition) THEN (accomplish GOAL)
IF (car has automatic transmission) THEN
(select drive)
IF (car has manual transmission) THEN (find car
with automatic transmission)
(c) M. Rauterberg, TU/e 37/59
Operators vs. Methods
• Operator: the most primitive action
• Method: requires several Operators or subgoal invocations to accomplish
• Level of detail determined by
– KLM level - key press, mouse press
– Higher level - select-Close-from-File-menu
– Different parts of model can be at different levels of detail
(c) M. Rauterberg, TU/e 38/59
Description ‘How to Use GOMS’
Goal: Generate-task-description
Op: pick high-level user goal
Op: write Method for accomplishing Goal
remark: may invoke subgoals
Op: write Methods for subgoals, this is recursive
if (Operator level is reached) then (stop)
Goal: Check-quality-of-task-description
Op: Evaluate description of task
Goal: Validate-task-description
Op: Apply results to User-Interface
Goal: Improve-quality-of-task-description
Op: Iterate
(c) M. Rauterberg, TU/e 39/59
GOMS Example 1: PDA Text Entry
goal: enter-text-PDA
op: move-pen-to-text-start
goal: enter-word-PDA repeat until no-more-words
op: write-letter repeat until no-more-letters
if (goal: correct-misrecognized-word)
then (method: correct-word)
Method: correct-word
goal: correction-of-misrecognized-word
op: move-pen-to-incorrect-word
op: delete-incorrect-word
op: write-correct-word
(c) M. Rauterberg, TU/e 40/59
GOMS Example 2: Iconise Window
GOAL: ICONISE-WINDOW
method: USE-CLOSE-METHOD
GOAL: Close-window-with-mouse
op: MOVE-MOUSE-TO-WINDOW-HEADER
op: POP-UP-MENU
op: CLICK-OVER-CLOSE-OPTION
method: USE-F7-METHOD
GOAL: Close-window-with-key
op: PRESS-F7-KEY
Selection:
If (application is GAME) then (method: USE-F7-METHOD)
If (application is NOT GAME) then (method: USE-CLOSE-
METHOD)
(c) M. Rauterberg, TU/e 41/59
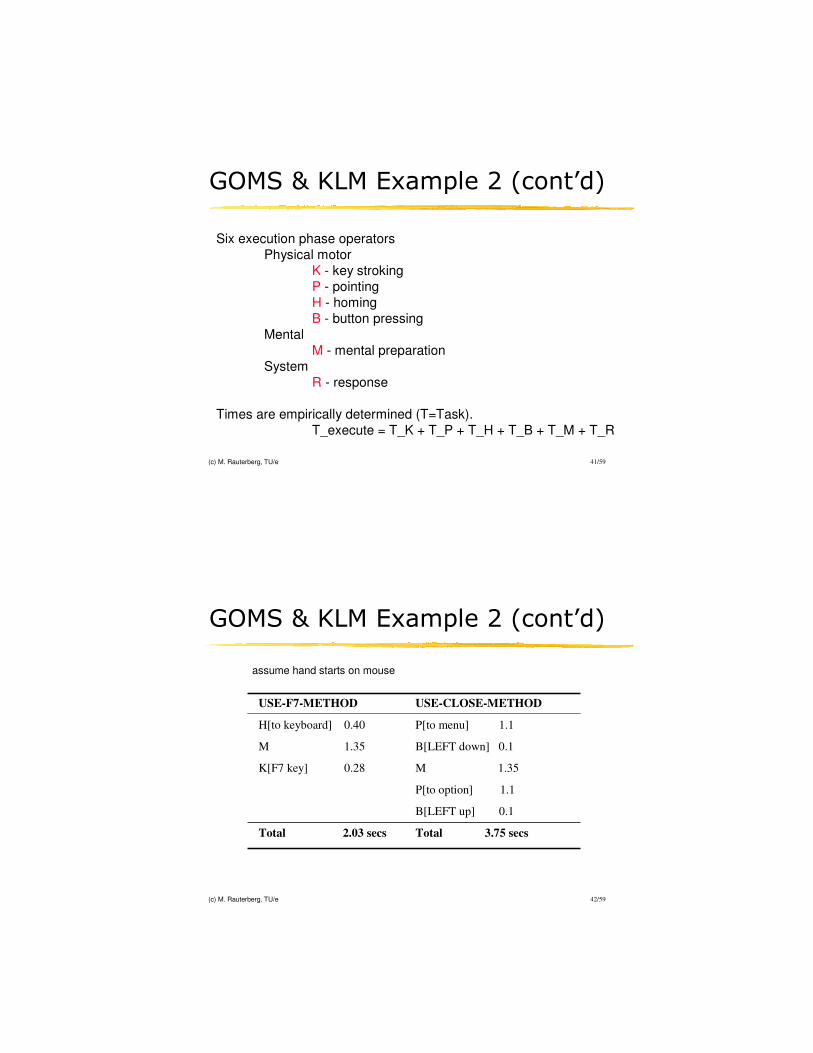
GOMS & KLM Example 2 (cont’d)
Six execution phase operators
Physical motor
K - key stroking
P - pointing
H - homing
B - button pressing
Mental
M - mental preparation
System
R - response
Times are empirically determined (T=Task).
T_execute = T_K + T_P + T_H + T_B + T_M + T_R
(c) M. Rauterberg, TU/e 42/59
GOMS & KLM Example 2 (cont’d)
USE-CLOSE-METHOD
P[to menu] 1.1
B[LEFT down] 0.1
M 1.35
P[to option] 1.1
B[LEFT up] 0.1
Total 3.75 secs
USE-F7-METHOD
H[to keyboard] 0.40
M 1.35
K[F7 key] 0.28
Total 2.03 secs
assume hand starts on mouse
(c) M. Rauterberg, TU/e 43/59
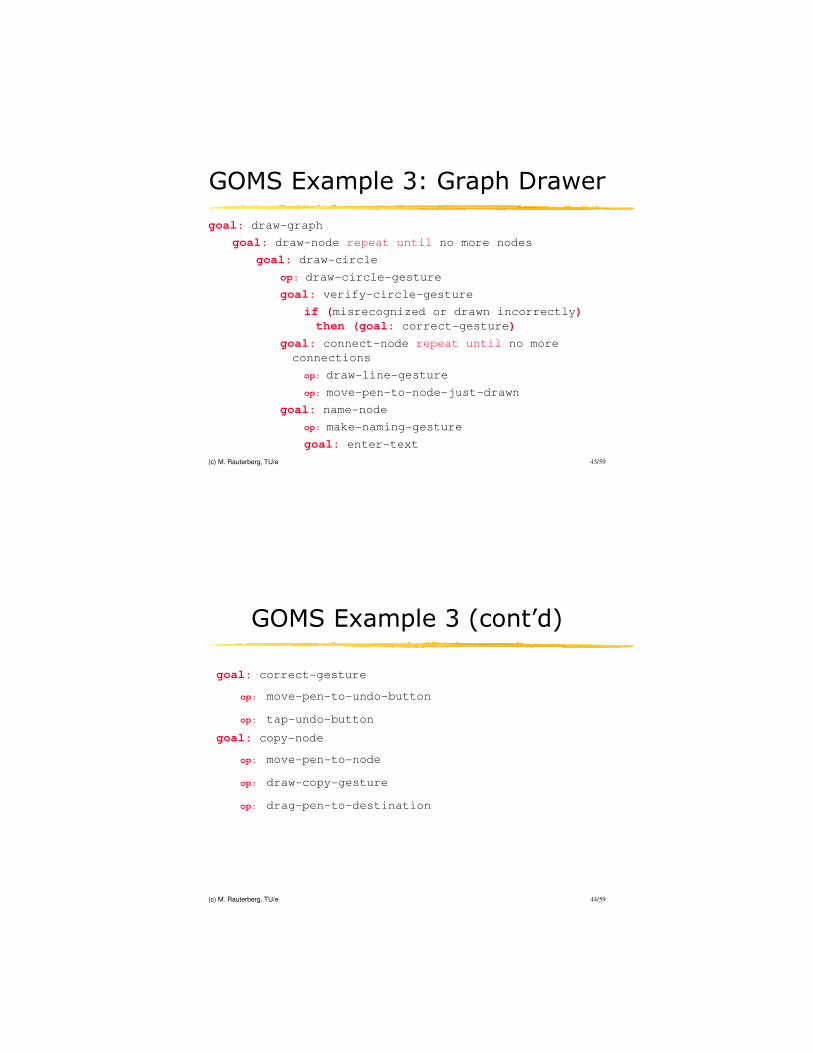
GOMS Example 3: Graph Drawer
goal: draw-graph
goal: draw-node repeat until no more nodes
goal: draw-circle
op: draw-circle-gesture
goal: verify-circle-gesture
if (misrecognized or drawn incorrectly)
then (goal: correct-gesture)
goal: connect-node repeat until no more
connections
op: draw-line-gesture
op: move-pen-to-node-just-drawn
goal: name-node
op: make-naming-gesture
goal: enter-text
(c) M. Rauterberg, TU/e 44/59
GOMS Example 3 (cont’d)
goal: correct-gesture
op: move-pen-to-undo-button
op: tap-undo-button
goal: copy-node
op: move-pen-to-node
op: draw-copy-gesture
op: drag-pen-to-destination
(c) M. Rauterberg, TU/e 45/59
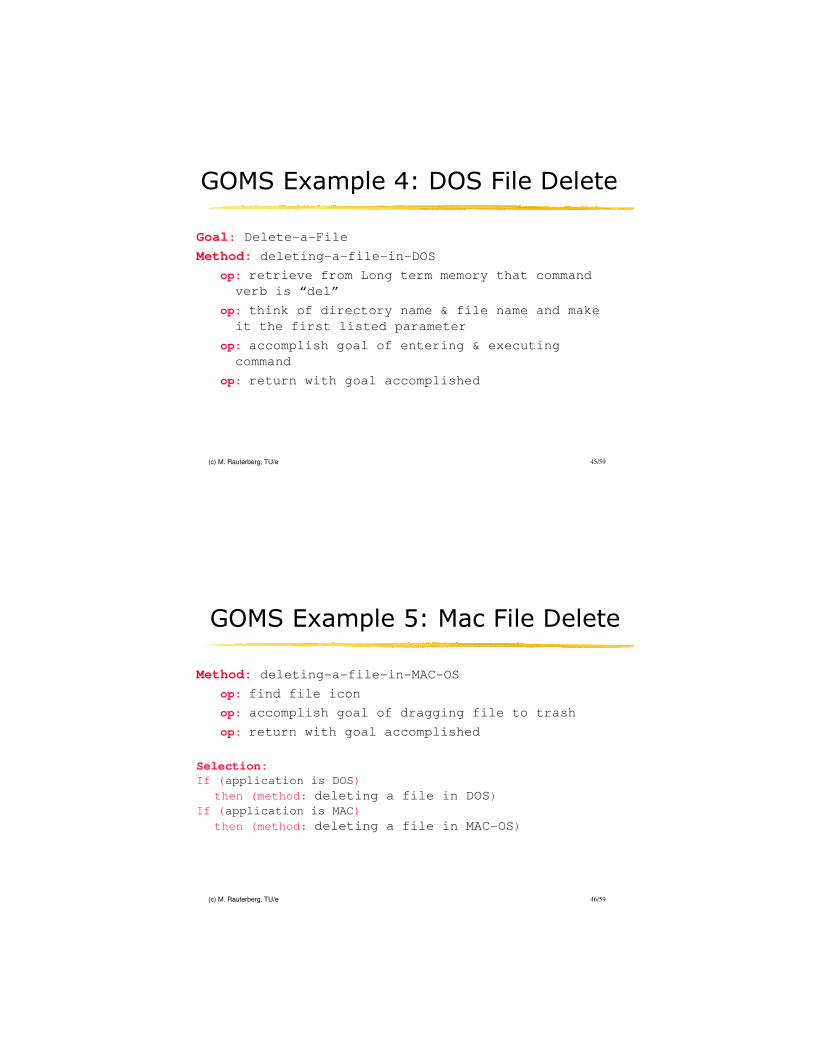
GOMS Example 4: DOS File Delete
Goal: Delete-a-File
Method: deleting-a-file-in-DOS
op: retrieve from Long term memory that command
verb is “del”
op: think of directory name & file name and make
it the first listed parameter
op: accomplish goal of entering & executing
command
op: return with goal accomplished
(c) M. Rauterberg, TU/e 46/59
GOMS Example 5: Mac File Delete
Method: deleting-a-file-in-MAC-OS
op: find file icon
op: accomplish goal of dragging file to trash
op: return with goal accomplished
Selection:
If (application is DOS)
then (method: deleting a file in DOS)
If (application is MAC)
then (method: deleting a file in MAC-OS)
(c) M. Rauterberg, TU/e 47/59
Advantages of GOMS
• Gives qualitative & quantitative measures
• Model explains the results
• Less work than user study – no users!
• Easy to modify when UI is revised
• Research: tools to aid modeling process since it can still be tedious
(c) M. Rauterberg, TU/e 48/59
Disadvantages of GOMS
• Not as easy as HE, guidelines, etc.
• Takes lots of time, skill, & effort
• Only works for goal-directed tasks
• Assumes tasks performed by experts without error
• Does not address several UI issues, – readability, memorizability of icons, commands
(c) M. Rauterberg, TU/e 49/59
User Action Notation (UAN)
• Developed by Hix and Hartson
• Further refined by Hartson and Gray
• Is neutral about the user and interface technology
• Aims to show how tasks match computer devices
• Elements
– Symbols and operators
– Conditions and options
– Tables of user action, feedback and system action/state
– Temporal relations and constraints
(c) M. Rauterberg, TU/e 50/59
UAN: Symbols and Operators
• Existing UAN uses special characters for mouse movement and button actions [remark: in this introduction text notation will be used]
• Example operators in UAN
move_mouse(x,y)*
release_button(x’,y’)
highlight(icon)
de_highlight(icon)
file = select()
(c) M. Rauterberg, TU/e 51/59
UAN: Conditions and Options
while (condition) TASK
if (condition) then TASK
iteration A* or A+
waiting can be an operation on a task
(c) M. Rauterberg, TU/e 52/59
UAN: Tables
• Three columned table
USER ACTION FEEDBACK SYSTEM STATE
clicking mouse highlighting object selecting file
entering text echo characters setting string
moving mouse show icon moving NULL
(c) M. Rauterberg, TU/e 53/59
UAN: Temporal relations
• strict sequence A,B
• B follows completion of A
• Order independence A&B
• A and B can be done in any order
• Concurrence with A|| B
• A and B are done simultaneously
• Interruptible by A->B
• A can interrupt B
• Interleavable A<|>B
• Swapping between A and B
(c) M. Rauterberg, TU/e 54/59
Move object from front to back
(c) M. Rauterberg, TU/e 55/59
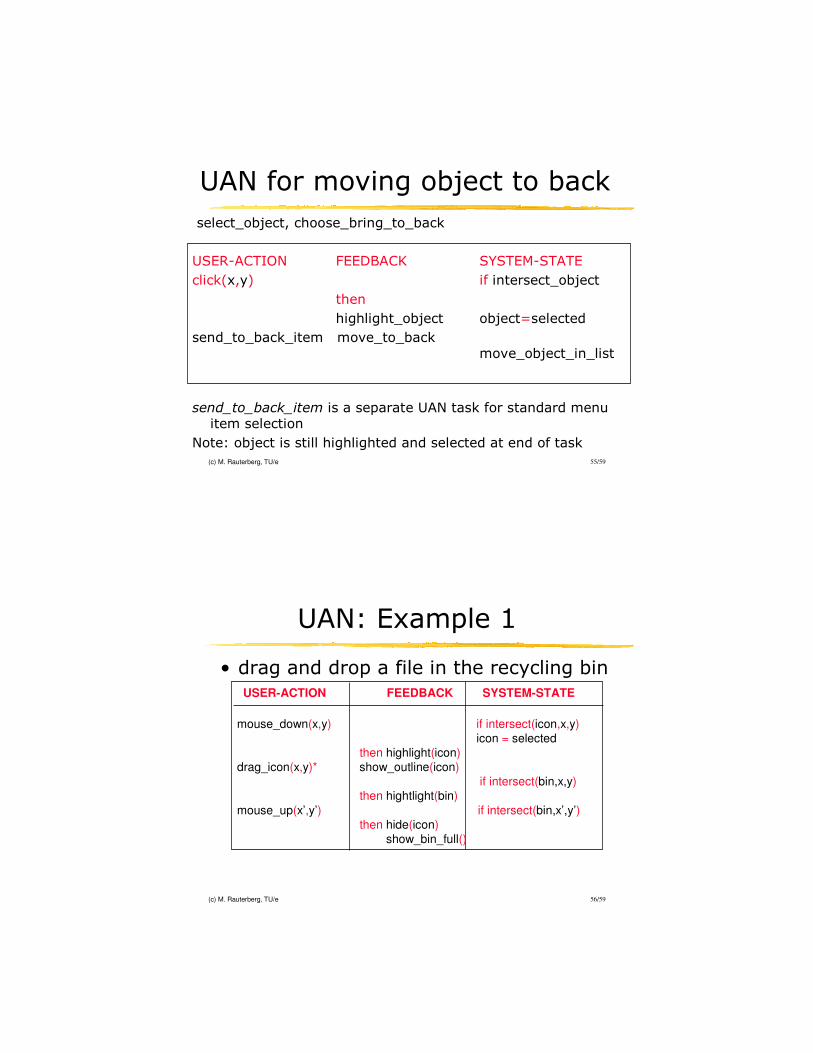
UAN for moving object to back
select_object, choose_bring_to_back
USER-ACTION FEEDBACK SYSTEM-STATE
click(x,y) if intersect_object
then
highlight_object object=selected
send_to_back_item move_to_backmove_object_in_list
send_to_back_item is a separate UAN task for standard menu item selection
Note: object is still highlighted and selected at end of task
(c) M. Rauterberg, TU/e 56/59
UAN: Example 1
• drag and drop a file in the recycling bin (partial example)USER-ACTION FEEDBACK SYSTEM-STATE
mouse_down(x,y) if intersect(icon,x,y)
icon = selected
then highlight(icon)
drag_icon(x,y)* show_outline(icon)
if intersect(bin,x,y)
then hightlight(bin)
mouse_up(x’,y’) if intersect(bin,x’,y’)
then hide(icon)
show_bin_full()
(c) M. Rauterberg, TU/e 57/59
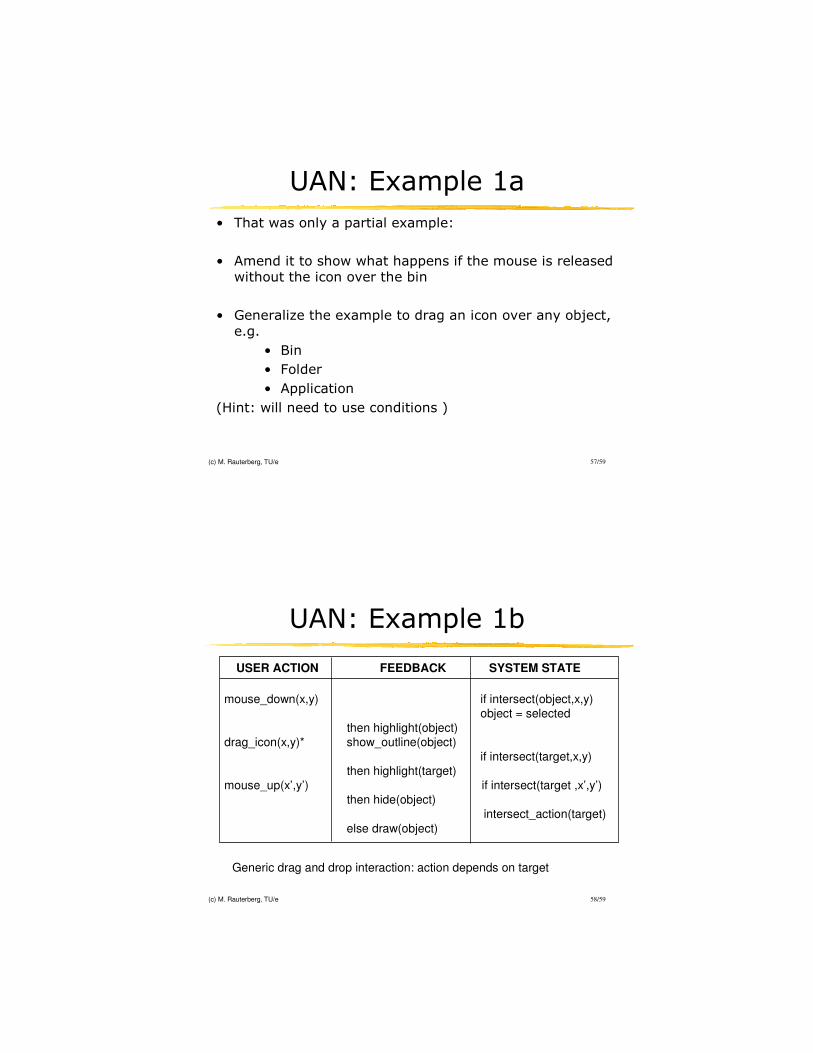
UAN: Example 1a
• That was only a partial example:
• Amend it to show what happens if the mouse is released without the icon over the bin
• Generalize the example to drag an icon over any object, e.g.
• Bin
• Folder
• Application
(Hint: will need to use conditions )
(c) M. Rauterberg, TU/e 58/59
UAN: Example 1b
USER ACTION FEEDBACK SYSTEM STATE
mouse_down(x,y) if intersect(object,x,y)
object = selected
then highlight(object)
drag_icon(x,y)* show_outline(object)
if intersect(target,x,y)
then highlight(target)
mouse_up(x’,y’) if intersect(target ,x’,y’)
then hide(object)
intersect_action(target)
else draw(object)
Generic drag and drop interaction: action depends on target
(c) M. Rauterberg, TU/e 59/59
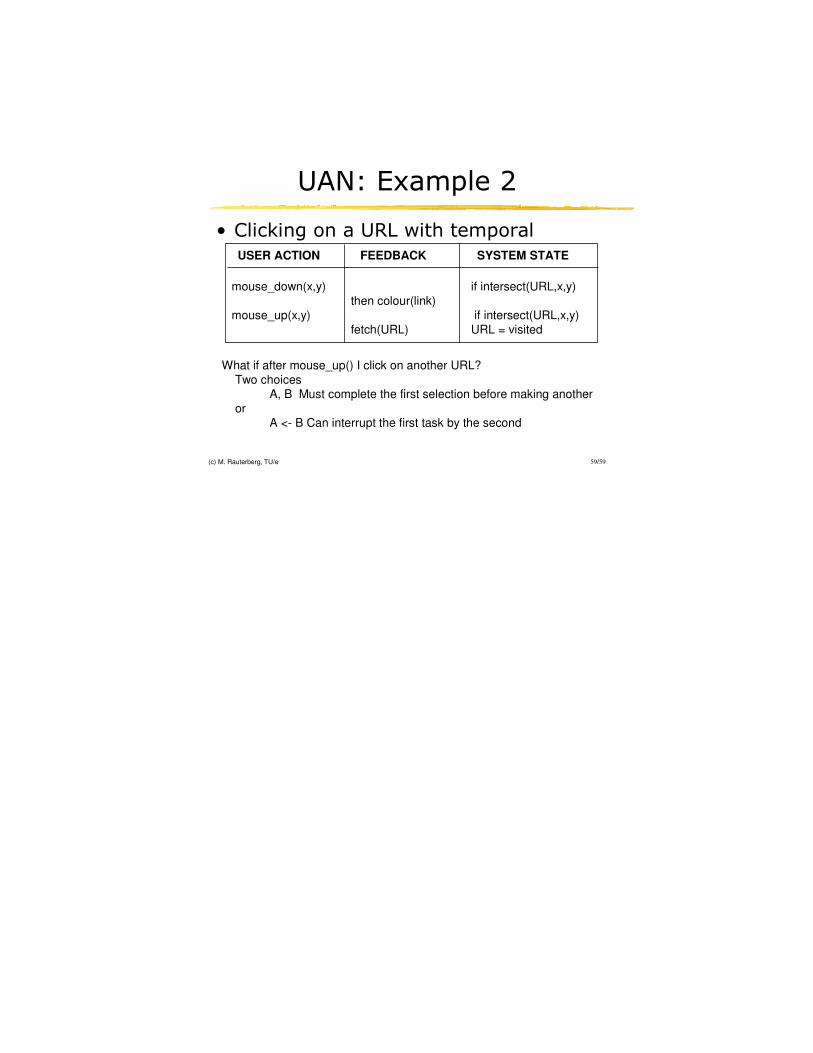
UAN: Example 2
• Clicking on a URL with temporal constraintsUSER ACTION FEEDBACK SYSTEM STATE
mouse_down(x,y) if intersect(URL,x,y)
then colour(link)
mouse_up(x,y) if intersect(URL,x,y)
fetch(URL) URL = visited
What if after mouse_up() I click on another URL?
Two choices
A, B Must complete the first selection before making another
or
A <- B Can interrupt the first task by the second