interaction capture and synthesis -...
TRANSCRIPT
3/31/2007
Interaction Captureand
Synthesis
Dinesh K. Pai
University of British Columbia
Rutgers University
[with Paul G. Kry]
Haptics ≡ The sense of touch≡ Force sensing and display?
Haptics ≡ ContactContact is multisensorywith forcessoundsdeformationmotion discontinuities…
Primary VisualCortex
Primary AuditoryCortex
SomatosensoryCortex
MotorCortex

3/31/2007
The AHI Audio-HapticInterfaceThe AHI Audio-HapticInterface
DiFilippo and Pai UIST 00See also [Doel and Pai 96], [Doel, Kry and Pai, SIGGRAPH 01]

3/31/2007
Precomputed Acoustic Transfer[James,Barbic,Pai SIGGRAPH 2006]Precomputed Acoustic Transfer[James,Barbic,Pai SIGGRAPH 2006]
Motivation: Whole hand interaction with the TangoMotivation: Whole hand interaction with the Tango
[Pai, et al. World Haptics 05]
• Whole hand passive haptic interface
• 32 x 8 capacitive sensor, 3 axis accelerometer

3/31/2007
Motivation: Motion capture animation techniques difficult to use with contactMotivation: Motion capture animation techniques difficult to use with contact
Motivation: Whole hand interaction with the TangoMotivation: Whole hand interaction with the Tango

3/31/2007
MotivationMotivation
• Need to capture how humans move– Impedance (stiffness) of muscles…
– Feed-forward control
• Brain actively controls the passive behavior of the musculoskeletal system – Depends on task, geometry, intent, style
– Important for stability
[Feldman 66; Hogan 84; Bizzi et al. 92; etc.]
originalobject
analysis
motion capture
force capture
simulationInteractionTrajectory
newobject
intendedmotion
passivebehavior
Interaction Capture and SynthesisInteraction Capture and Synthesis
newobject

3/31/2007
motion capture cameras 500 Hz
Overview ExampleOverview Example
Overview ExampleOverview Example
motion capture cameras 500 Hz
force-torque sensor 500 Hz

3/31/2007
Overview ExampleOverview Example
Overview ExampleOverview Example
• Estimate the Interaction Trajectory– Compliance (inverse of stiffness)
– Reference trajectory (motion without contact)
analysis
motion capture
force capture
intendedmotion
passivebehavior
referencetrajectory
compliance

3/31/2007
Overview ExampleOverview Example
• Environment– Fully dynamic simulation
• Character – Contact from quasi-static
simulation
– Dynamics from referencetrajectory
analysis
motion capture
force capture
simulation
referencetrajectory
compliance
referencetrajectory
compliance
OutlineOutline
• Interaction trajectory estimation
analysis
motion capture
force capture
simulation
reference trajectory
compliance
3/31/2007
Compliant hand modelCompliant hand model
∆u1
Effective end-point compliance
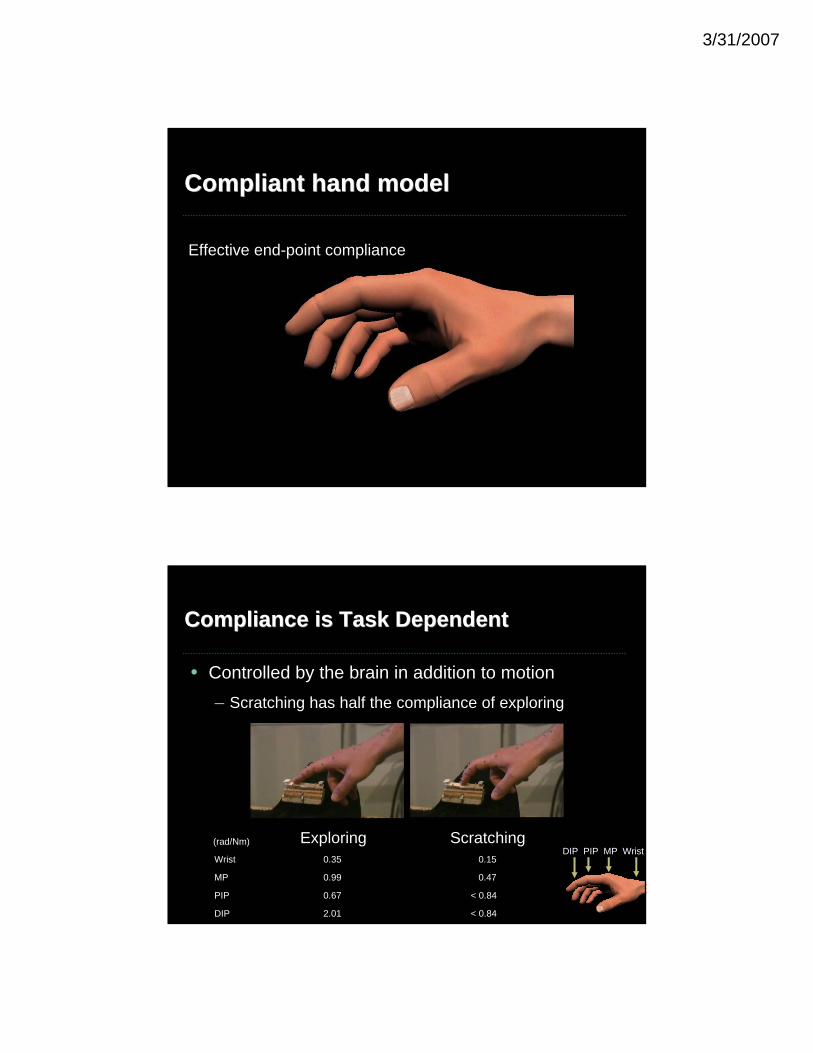
Compliance is Task DependentCompliance is Task Dependent
Exploring ScratchingWrist 0.35 0.15
MP 0.99 0.47
PIP 0.67 < 0.84
DIP 2.01 < 0.84
• Controlled by the brain in addition to motion– Scratching has half the compliance of exploring
DIP PIP MP Wrist(rad/Nm)

3/31/2007
Compliance EstimationCompliance Estimation
• Previous workArms [Xu, Hollerbach, Hunter 91; Gomi, Kawato 96; etc.]
Fingers [Hajian 97; Milner, Franklin 98; Hasser, Cutkosky 02]
• Stiffness, some measure damping and inertia too
• End points, joints, static poses, during movement
• Approach in common is perturbation– Complicates capture, changes the motion
Compliance Estimation without extra perturbationCompliance Estimation without extra perturbation
• Contact provides a natural perturbation– Exploits slow speed of spinal reflexes

3/31/2007
-0.1 -0.05 0 0.05 0.1
-0.36
-0.34
-0.32
-0.3 joint angle
-0.1 -0.05 0 0.05 0.10
0.02
0.04
0.06 joint torque
seconds
post-contactpre-contact
reference trajectory
post-contact
capture
capture
this joint
Capture Data at time of contactCapture Data at time of contact
seconds
Assumptions & LimitationsAssumptions & Limitations
• Independent compliance estimations
• Natural perturbation must be observable
• Complex ‘pre-programmed’ motion

3/31/2007
ValidationValidation
(rad/Nm) Exploring ScratchingWrist 0.35 0.15
MP 0.99 0.47
PIP 0.67 < 0.84
DIP 2.01 < 0.84
• Estimates show task dependence– Scratching has half the compliance of exploring
DIP PIP MP Wrist
ValidationValidation
• Perturbation via spring loaded platform

3/31/2007
ValidationValidation
seconds
fingertipelevation
normalforce
-0.05 0 0.05 0.1 0.15
0
2
4
-0.05 0 0.05 0.1 0.15
0246
100 ms delay
Estimates reasonable given values in previous studies[Hajian 97; Milner et al. 98; Kuchenbecker et al. 03]
285.9681.86kG (N/m)
257.0489.16k (N/m)
3.862.04b (Ns/m)
0.0180.017m (kg)
1.3450.677f0 (N)
ScratchingExploringParameter
ValidationValidation
kGOUR METHOD

3/31/2007
OutlineOutline
• Interaction Synthesis
analysis
motion capture
force capture
simulation
reference trajectory
compliance
Interaction SynthesisInteraction Synthesis
• Quasi-static simulation– Alternative is fully dynamic simulation
– Capture already contains character’s dynamics
– Focus on synthesizing contact perturbations
– Compute the new forces with Coulomb friction

3/31/2007
• Linear Complimentarity Problem (LCP)– New algorithm for compliant contact and friction
Interaction SynthesisInteraction Synthesis
f k
∆u
∆f
Discretized friction cone Contact Point Motion• Reference trajectory• End point compliance• Dynamic environment
ResultsResults

3/31/2007
ResultsResults
ResultsResults

3/31/2007
Grip AdjustmentGrip Adjustment
• Object unexpectedly heavier than expected– Tighten grip by reducing compliances after a small delay
Grip AdjustmentGrip Adjustment
• Expected changes– Similar motor program, adjusted due to object appearance
– Gradually reduce compliance when slip is imminent

3/31/2007
Example Using Tango CaptureExample Using Tango Capture
analysis
motion capture
force capture
simulation
referencetrajectory
compliance
previously estimated
compliance
Tango captures at 100 Hz
ConclusionsConclusions
• Interaction capture– Extends motion capture to handle contact
– Compliance estimation from natural movement
• Interaction synthesis by simulation– New algorithm for compliant contact with friction

3/31/2007
• Download data at http://www.interactioncapture.org
Thanks to the support of
• NSF grants IIS-0308157, EIA-0215887, ACI-0205671, EIA-0321057
• NIH CRCNS 1R01NS050942
• Canada Research Chair