intelligent robotic systems - engr.du. · pdf fileence 3830 : intelligent robotic systems...
TRANSCRIPT
1
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
Intelligent Robotic SystemsIntelligent Robotic Systems
Prof. Richard VoylesDepartment of Computer Engineering
University of Denver
ENCE 3830/4800
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
What is a Robot?What is a Robot?
WWWebsters:
� a mechanism guided by automatic controls
� a device that automatically performs complicated often repetitive tasks
� a machine that looks like a human being and performs various complex acts (as walking or talking) of a human being; also : a similar but fictional machine whose lack of capacity for human emotions is often emphasized
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
Is This a Robot?Is This a Robot?

2
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
How How ‘‘ Bout Now?Bout Now?
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
What is a Robot?What is a Robot?
WWWebsters:
� a mechanism guided by automatic controls
� a device that automatically performs complicated often repetitive tasks
� a machine that looks like a human being and performs various complex acts (as walking or talking) of a human being; also : a similar but fictional machine whose lack of capacity for human emotions is often emphasized
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
We Can All Agree on This GuyWe Can All Agree on This Guy
3
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
What is a Robot?What is a Robot?
WWWebsters:
� a mechanism guided by automatic controls
� a device that automatically performs complicated often repetitive tasks
� a machine that looks like a human being and performs various complex acts (as walking or talking) of a human being; also : a similar but fictional machine whose lack of capacity for human emotions is often emphasized
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
But What About This Guy?But What About This Guy?
� Automatically Performs Complex Tasks
� Repetitive Actions
� Looks Like a Human
� Has Mechanical Sensors
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
……And What About This Guy?And What About This Guy?

4
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
Mind ChildrenMind Children
Hans MoravecRobot: Mere Machine to Transcendant
Mind
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
Mind ChildrenMind Children
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
Essential Ingredients of RobotsEssential Ingredients of Robots
� Perception– A Robot must be able to Sense the World
� Cognition– A Robot must be able to React to those
Sensations
� Manipulation– A Robot must be able to Affect the World
Carnegie Mellon University, Robotics Institute
5
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
Rosie the Robot!Rosie the Robot!
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
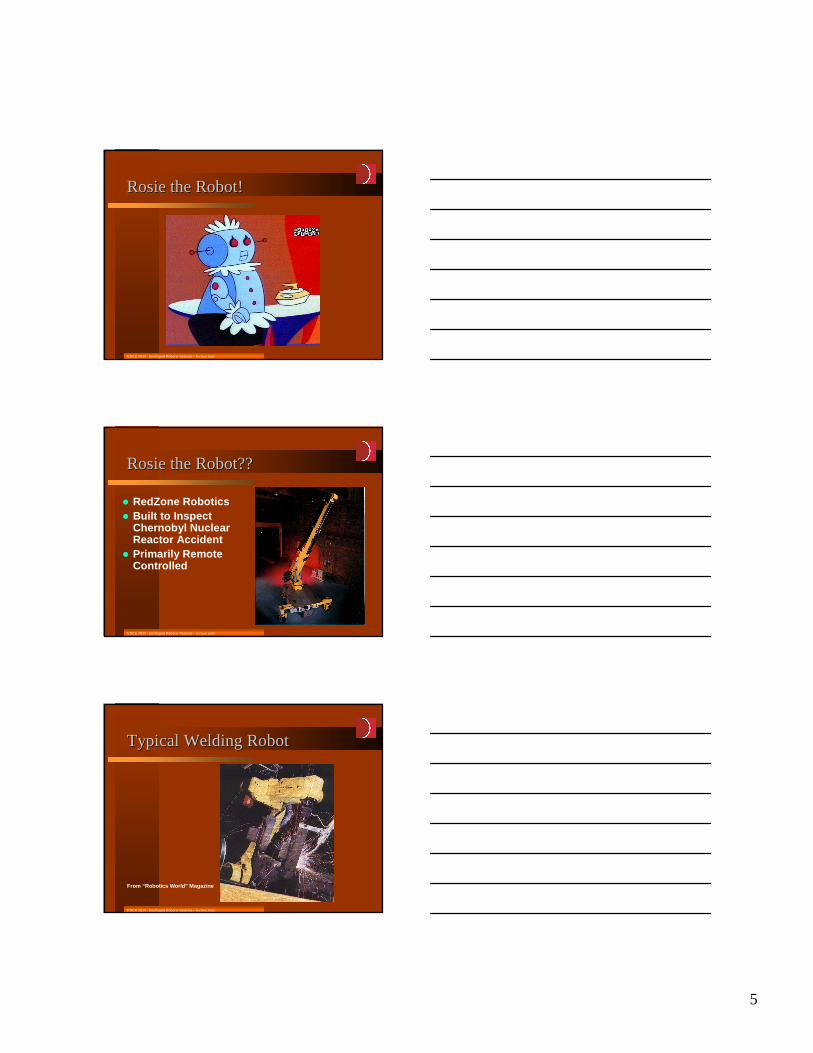
Rosie the Robot??Rosie the Robot??
� RedZone Robotics� Built to Inspect
Chernobyl Nuclear Reactor Accident
� Primarily Remote Controlled
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
Typical Welding RobotTypical Welding Robot
From “Robotics World” Magazine

6
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
A Truck That Drives ItselfA Truck That Drives Itself
NAVLAB� Special Transmission
(20 mph)� Laser Rangefinder� Sonar� Cameras
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
Bomb Disposal Mobile RobotBomb Disposal Mobile Robot
� Teleoperated� Slow� Saves Lives
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
Is This a Robot?Is This a Robot?

7
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
A Truck That Drives ItselfA Truck That Drives Itself
NAVLAB� Special Transmission
(20 mph)� Laser Rangefinder� Sonar� Cameras� 4-6 Grad Students
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
NAVLAB 2NAVLAB 2
Artificial Neural Network Brain learned to drive up to 70 mph on smooth roads up to 90 miles without help.
� Off-road, too
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
NAVLAB ImprovedNAVLAB Improved
� DC to LA� 98.2% hands-off
8
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
What Do We Know So Far???What Do We Know So Far???
� Two Basic Types of Robots– Manipulators (Arms)– Locomotors (Mobile Robots)
� Robots Embody:– Perception– Cognition– Manipulation
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
OK, some are bothOK, some are both……
� Commander Data?
� Mobile Manipulation
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
Honda Honda AsimoAsimo

9
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
TeleoperatedTeleoperatedRobotsRobots
� Programming by Demonstration
� Drive by Wire
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
SarcosSarcos’’ Jurassic ParkJurassic Park
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
Scout Scout MicrobotMicrobot

10
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
Scout/Ranger TeamScout/Ranger Team
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
Alternate Scout Form FactorAlternate Scout Form Factor
Stowed Configuration Deployed Configuration
Hemispherical side for smooth manipulation
Concave claw for traction/digging
� Both Manipulator and Locomotor
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
Alternate Scout PrototypeAlternate Scout Prototype
� 1st Prototype is 75 mm in Diameter (approx. 2x scale)

11
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
TerminatorBotTerminatorBotCrawlingCrawling
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
Still Primarily Still Primarily TeleoperatedTeleoperated
� Think Predator drone…
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
GestureGesture--Based ProgrammingBased Programming

12
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
Nomad in Nomad in AtacamaAtacamaDesertDesert
•Moon-like Terrain
•Smart Teleoperation
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
MITMIT ’’ s Cogs Cog
� “Infant” Robot� Learns like a baby� Plays by watching
others� Can adapt to the
slinky
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
MITMIT ’’ s Kismets Kismet
� Responds to human emotion with emotion
� Can Get:– Mad– Bored– Surprised– Happy– Tired

13
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
NAVLAB NowNAVLAB Now ……autonomousautonomous
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
Indoor Mobile RobotsIndoor Mobile Robots
� Cluttered Environment
� Human Interaction� Hostile Behavior� Long-Term
Operation� Sensor Deprivation
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
CMUCMU’’ s Amblers Ambler
� Robot for walking on Mars
� 18 feet tall! (2x flight size)
� Steps over jeeps

14
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
What Do We Know About Control?What Do We Know About Control?
� Perception, Cognition, Manipulation can support:– Teleoperation– Autonomy– Shared Control (Human-in-the-loop)
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
Modular ManipulatorsModular Manipulators
3 x
+
=
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
RobotWorldRobotWorld
� Carefully controlled, precise environment
� Many robots cooperate
� Each robot very simple and fast
� Heterogeneous capabilities (specialization)

15
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
Cartesian vs. RevoluteCartesian vs. Revolute
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
Stewart Platform (parallel)Stewart Platform (parallel)
� Strong and Stiff� Simple Inverse Kinematics
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
Parallel Chains are Much TrickierParallel Chains are Much Trickier
16
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
Parallel Chains are Much TrickierParallel Chains are Much Trickier
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
Parallel Sensing MechanismsParallel Sensing Mechanisms
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
� Molecular Recognition Biosensors
– MEMS-Based Microcantilever Beams
� Precision Micromotors
– Piezoelectric Micromotors
– Electromagnetic Micromotors
� Vibration Monitoring Devices
– Microcantilever Beams, Interface Electronics,
– and Telemetry
MEMS Projects: Biosensors, MEMS Projects: Biosensors, MicromotorsMicromotors, , Vibration MonitorsVibration Monitors

17
ENCE 3830 : Intelligent Robotic Systems – lecture.intro
GestureGesture--Based ProgrammingBased Programming
� Programming by Human Demonstration
� Programming Contact Tasks is Hard� More Natural for the Human Trainer� More Amenable to Contact Tasks� Skill-Based Approach