integrated management of power aware computing & communication technologies
DESCRIPTION
Integrated Management of Power Aware Computing & Communication Technologies. Review Meeting Nader Bagherzadeh, Pai H. Chou, Fadi Kurdahi, UC Irvine Jean-Luc Gaudiot , USC, Nazeeh Aranki, Benny Toomarian , JPL DARPA Contract F33615-00-1-1719 June 13, 2001 JPL -- Pasadena, CA. Agenda. - PowerPoint PPT PresentationTRANSCRIPT

1
Integrated Management of Power Aware Computing & Communication
TechnologiesReview Meeting
Nader Bagherzadeh, Pai H. Chou, Fadi Kurdahi, UC Irvine
Jean-Luc Gaudiot, USC,Nazeeh Aranki, Benny Toomarian, JPL
DARPA Contract F33615-00-1-1719
June 13, 2001
JPL -- Pasadena, CA

2
Agenda
Administrative Review of milestones, schedule
Technical presentation Progress
Applications (UAV/DAATR, Rover, Deep Impact, distributed sensors) Scheduling (system-level pipelining) Advanced microarchitecture power modeling (SMT) Architecture (mode selection with overhead) Integration (Copper, JPL, COTS data sheet)
Lessons learned Challenges, issues Next accomplishments
Questions & action items review.

3
Quad Chart
Innovations Component-based power-aware design
Exploit off-the-shelf components & protocols Best price/performance, reliable, cheap to replace
CAD tool for global power policy optimization Optimal partitioning, scheduling, configuration Manage entire system, including mechanical & thermal
Power-aware reconfigurable architectures Reusable platform for many missions Bus segmentation, voltage / frequency scaling
Impact
Enhanced mission success More task for the same power Dramatic reduction in mission completion time
Cost saving over a variety of missions Reusable platform & design techniques Fast turnaround time by configuration, not redesign
Confidence in complex design points Provably correct functional/power constraints Retargetable optimization to eliminate overdesign Power protocol for massive scale
Behavior
Architecture
high-levelsimulation
functionalpartitioning& scheduling
compositionoperators
high-levelcomponents
behavioralsystem model
busses, protocols systemarchitecture
mapping system integration& synthesis
staticconfiguration
dynamic powermanagement
parameterizablecomponents
2Q 00
Kickoff
2Q 01 2Q 02
Static & hybrid optimizations partitioning / allocation scheduling bus segmentation voltage scaling
COTS component library
FireWire and I2C bus models
Static composition authoring
Architecture definition
High-level simulation
Benchmark Identification
Dynamic optimizations task migration processor shutdown bus segmentation frequency scaling
Parameterizable components library
Generalized bus models
Dynamic reconfiguration authoring
Architecture reconfiguration
Low-level simulation
System benchmarking
Year 1 Year 2

4
Program Overview
Power-aware system-level design Amdahl's law applies to power as well as performance Enhance mission success (time, task) Rapid customization for different missions
Design tool Exploration & evaluation Optimization& specialization Technique integration
System architecture Statically configurable Dynamically adaptive Use COTS parts & protocols

5
Personnel & teaming plans
UC Irvine - Design tools Nader Bagherzadeh - PI Pai Chou - Co-PI Fadi Kurdahi Jinfeng Liu Dexin Li Duan Tran
USC - Component power optimization Jean-Luc Gaudiot - faculty participant Seong-Won Lee - student
JPL - Applications & benchmarking Nazeeh Aranki Nikzad “Benny” Toomarian
- students

6
Milestones & Schedule
Static & hybrid optimizationspartitioning / allocationschedulingbus segmentationvoltage scaling
COTS component library
FireWire and I2C bus models
Static composition authoring
Architecture definition
High-level simulation
Benchmark Identification
Dynamic optimizations task migrationprocessor shutdownbus segmentation frequency scaling
Parameterizable components library
Generalized bus models
Dynamic reconfiguration authoring
Architecture reconfiguration
Low-level simulation
System benchmarking

7
we are here!
Review of Progress
May'00 Kickoff meeting (Scottsdale, AZ)
Sept'00 Review meeting (UCI) Scheduling formulation, UI mockup, System level configuration Examples: Pathfinder & X-2000 (manual solution)
Nov'00 PI meeting (Annapolis, MD) Tools: scheduler + UI v.1 (Java) Examples: Pathfinder & X-2000 (automated)
Apr'01 PI meeting (San Diego, CA) Tools: scheduler + UI v.2 - v.3 (Jython) Examples: Pathfinder & initial UAV (Pipelined)
June'01 Review meeting

8
New for this Review (June '01)
Tools Scheduler + UI v.4 (pipelined, buffer matching) Mode selector v.1 (mode change overhead, constraint based) SMT model
Examples: Pathfinder, µAMPS sensors (mode selection) UAV, Wavelet (dataflow) (pipelined, detailed estimate) Deep Impact (command driven) (planning)
Integration Input from Copper:
timing/power estimation (PowerPC simulation model) Output to Copper:
power profile + budget (Copper Compiler) Within IMPACCT:
initial Scheduler + Mode Selector integration
9
Overview of Design Flow
Input Tasks, constraints, component library Estimation (measurement or simulation via COPPER)
Refinement Loop Scheduling (pipeline/transform…) Mode Selection (either before or after scheduling) System level simulation (planned integration)
Output: to COPPER Interchange Format:
Power Profile, Schedule, Selected modes Code Generation Microarchitecture Simulation
10
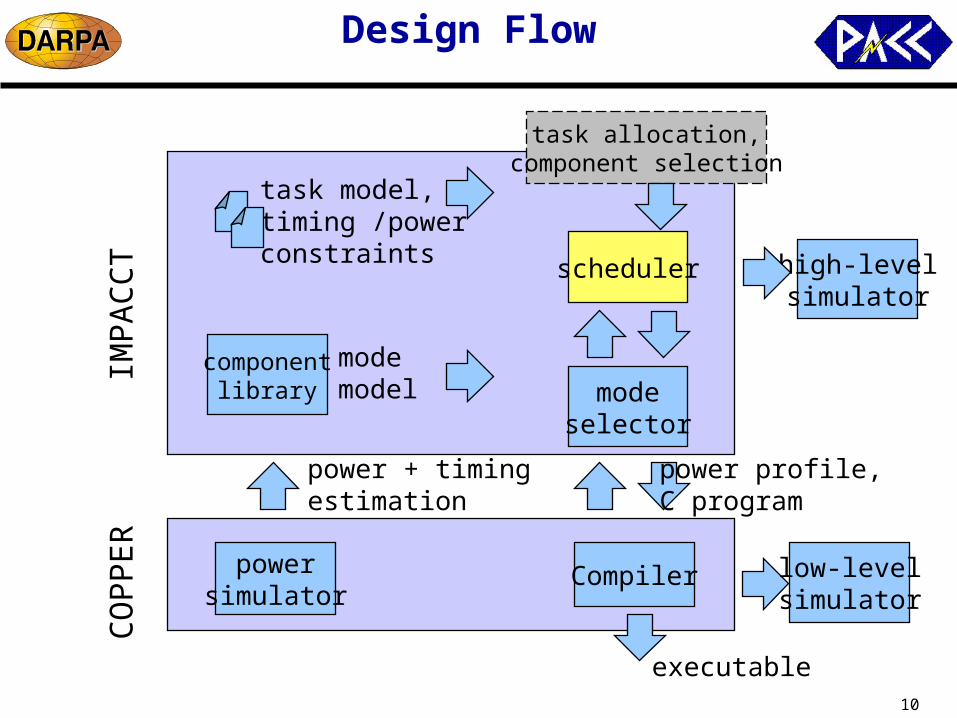
Design Flow
componentlibrary
scheduler high-levelsimulator
modeselector
powersimulator
task model,timing /powerconstraints
Compiler
power profile,C program
modemodel
power + timingestimation
task allocation,component selection
CO
PP
ER
IMP
AC
CT
low-levelsimulator
executable

11
Power Aware Scheduling
Execution model Multiple processors, multiple power consumers Multiple domains: digital, thermal, mechanical
Constraint driven Min / Max power Min / Max timing constraints
Handles problems in different domains Time Driven System level pipelining -- in time and in space Parallelism extraction
Experimental results Coarse to fine grained parallelism tradeoffs

12
Prototype of GUI scheduling tool
Power-aware Gantt chart Time view
Timing of all tasks on parallel resources
Power consumption of each task Power view
System-level power profile Min/max power constraint, energy
cost
Interactive scheduling Automated schedulers – timing,
power, loop Manual intervention – drag &
drop
Demo available

13
Power-Aware Scheduling
New constraint-based application model [paper at Codes'01] Min/Max Timing constraints
Precedence, subsumes dataflow, general timing, shared resource Dependency across iteration boundaries – loop pipelining Execution delay of tasks – enables frequency/voltage scaling
Power constraints Max power – total power budget Min power – controls power jitter or force utilization of free source
System-level, multi-scenario scheduling [paper at DAC'01] 25% Faster while saving 31% energy cost Exploits "free" power (solar, nuclear min-output)
System-level loop pipelining [working papers] Borrow time and power across iteration boundaries Aggressive design space exploration by new constraint classification Achieves 49% speedup and 24% energy reduction

14
Scheduling case study:Mars Pathfinder
System specification 6 wheel motors 4 steering motors System health check Hazard detection
Power supply Battery (non-rechargeable) Solar panel
Power consumption Digital
Computation, imaging, communication, control Mechanical
Driving, steering Thermal
Motors must be heated in low-temperature environment
15
Scheduling case study:Mars Pathfinder
Input Time-constrained tasks Min/Max Power constraints Rationale: control jitter, ensure utilization of free power
Core algorithm Static analysis of slack properties Solves time constraints by branch&bound Solves power constraints by local movements within slacks
Target architecture X-2000 like configurable space platform Symmetric multiprocessors, multi-domain power consumers, solar/batt
Results Ability to track power availability Finishes task faster while incurring less energy cost

16
More aggressive scheduling:System-level pipelining
Borrow tasks across iterations Alleviates "hot spots" by spreading to another iteration Smooth out utilization by borrowing across iterations
Core techniques Formulation: separate pseudo dependency from true dependency Static analysis and task transformation Augmented scheduler for new dependency
Results -- on Mars Pathfinder example Additional energy savings with speedup Smoother power profile
17
Scheduling case study:UAV DAATR
Example of a very different nature! Algorithm, rather than "system" example
Target architecture C code -- unspecified; assume sequential execution, no parallelism MatLab -- unmapped
Algorithm Sequential, given in MatLab or C Potential parallelism in space, not in time
Constraints & dependencies Dataflow: partial ordering Timing: latency; no pairwise Min/Max timing Power: budget for different resolutions
18
Scheduling case study:UAV example (cont'd)
Challenge: Parallelism Extraction Essential to enable scheduling Difficult to automate; need manual code rewrite Different pipeline stages must be relatively similar in length
Rewritten code Inserted checkpoints for power estimation Error prone buffer mapping between iterations
Found a dozen bugs in benchmark C code Missing Summation in standard deviation calculation Frame buffer off by one line Dangling pointers not exposed until pipelined

19
ATR application: what we are given
Target Detection
FFT
Filter/IFFT
Filter/IFFT
Filter/IFFT
ComputeDistance
ComputeDistance
1 Frame
m Detections3 filters
FFT FFT FFT
Filter/IFFT
Filter/IFFT
Filter/IFFT
ComputeDistance
ComputeDistance
FFT FFT
Bugs

20
Bug report
Misread input data file OK, no effect to the algorithm
Miscalculate mean, std for image OK, these values not used (currently)
Wrong filter data for SUN/PowerPC OK for us, since we operate on different platforms Bad for SUN/PowerPC users, wrong results
Misplaced FFT module The algorithm is wrong
If images are turned upside-down, the results are different Not sure whether it is correct
However, these problems are not captured in the output image files

21
What it should look like
Target Detection
FFT FFT
Filter/IFFT
Filter/IFFT
Filter/IFFT
ComputeDistance
ComputeDistance
ComputeDistance
ComputeDistance
Filter/IFFT
Filter/IFFT
Filter/IFFT
1 Frame
m Detections
3 filters
k distances

22
What it really should look like
Target Detection
FFT FFT
Filter/IFFT
Filter/IFFT
Filter/IFFT
ComputeDistance
ComputeDistance
ComputeDistance
ComputeDistance
Filter/IFFT
Filter/IFFT
Filter/IFFT
1 Frame
m Detections
3 filters
k distances

23
Problems
Limited parallelism Serial data flow with tight dependency Parallelism available (diff. detections, filters, etc) but limited
Limited ability to extract parallelism Limited by serial execution model (C implementation) No available parallel platforms
Limited scalability Cannot guarantee response time for big images (N2 complexity) Cannot apply optimization for small images (each block is too small)
Limited system-level knowledge High-level knowledge lost in a particular implementation

24
Our vision: 2-dimensional partitioning
M Targets(M FFTs)
M Targets(3M IFFTs)
K Distances(2K IFFTs)
Output: target detection w/ distance for N simultaneous frames
Target Detection
FFT
Filter/IFFT
ComputeDistance
m Detections
3 filters
k distances
Filter/IFFT
Filter/IFFT
ComputeDistance
FFT
Filter/IFFT
ComputeDistance
Filter/IFFT
Filter/IFFT
ComputeDistance
Single DFG(vertical flow)
Target Detection
FFT
Filter/IFFT
ComputeDistance
m Detections
3 filters
k distances
Filter/IFFT
Filter/IFFT
ComputeDistance
FFT
Filter/IFFT
ComputeDistance
Filter/IFFT
Filter/IFFT
ComputeDistance
Input:N simultaneous
frames
Cluster by N DFGs(horizontal duplication)
N Frames(N target detection)
Partitioning(horizontal cuts)
25
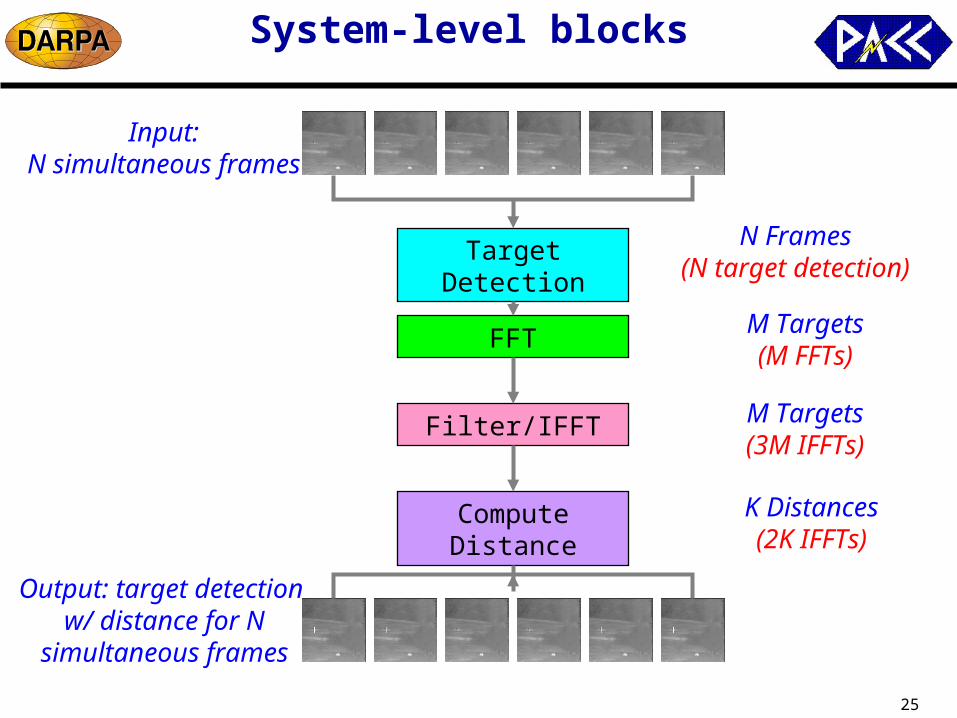
System-level blocks
Target Detection
FFT
Filter/IFFT
Compute Distance
N Frames(N target detection)
M Targets(M FFTs)
M Targets(3M IFFTs)
K Distances(2K IFFTs)
Input:N simultaneous frames
Output: target detection w/ distance for N
simultaneous frames

26
System-level pipelining
Target Detection
FFT
Filter/IFFT
Compute Distance
Input:N simultaneous frames
Output: target detection w/ distance for N
simultaneous frames
Group 0Group 1
Group 0
Group 2
Group 0
Group 1
Group 3
Group 0
Group 1
Group 2
Group 4
Group 3
Group 2
Group 1
Group 0
Group 5
Group 4
Group 3
Group 2
Group 1

27
What does it buy us?
Parallelism All modules run in PARALLEL Each module processes N (M, K) INDEPENDENT instances, that could
all be processed in parallel NO DATA DEPENDENCY between modules
Throughput Throughput multiplied by processing units Process N frames at a reduced response time Better utilization of resources

28
What does it buy us? (cont'd)
Flexibility Insert / remove modules at any time Adjust N, (M or K) at any time Make each module parallel / serial at any time More knobs to tune: parallelism / response time / throughput / power Driven by run-time constraints
Scalability Reduced response time on big images (small N and/or deeper pipe) Better utilization/throughput on small images
More compiler support Simple control / data flow: each module is just a simple loop, which is
essentially parallel Need an automatic partitioning tool to take horizontal cuts

29
What does it buy us: how power-aware is it?
Subsystems shut-down Turn on / off any time based on power budget Split / merge (migrate) modules on demand
Power-aware scheduling Each task can be scheduled at any time during one pipe stage, since
they are totally independent More scheduling opportunity with an entire system
Dynamic voltage/frequency scaling The amount of computation N, (M or K) is known ahead of time Scaling factor = C / N (very simple!) Less variance of code behavior =>
strong guarantee to meet deadline, more accurate power estimates
Run-time code versioning Select right code based on N, (M or K)

30
Experimental implementation:pipelining transformation
Goal To make everything completely independent
Methodology Dataflow graph extraction (vertical) Initial partitioning (currently manual with some aids from COPPER) Horizontal clustering Horizontal cut (final partitioning)
Techniques Buffer assignment: each module gets its own buffer Buffer renaming: read/write on different buffer Circular buffer: each module gets a window of fixed buffer size Our approach: the combination

31
Buffer rotation
B
Circular buffer B
Pipe stages:a, b, c, d
a
b
cd
Time = 0
a b c
dTime = 1
ab c
d
Time = 2
ab
c d
Time = 3a
bc
d
Time = 4a
bc
d
Time = 5

32
Background - acyclic dataflow
a
b
c
d
Single circular buffer One serial data flow path All data flows are of same type
same size
Multiple buffers Multiple data flow paths Different type, size
a
b
c
d

33
A more complete picture
ab c
d
Circular buffer A, B rotate at the same speed
Pipe stages:a, b, c, d
B
A
Time = 0Time = 1
B
A
B
A
Time = 2B
A
Time = 3Time = 4
B
A
Time = 5
B
A
2. Buffer live
3. Life-time spent in pipeline 4. Buffer dead
1. Buffer ready(raw data, e.g. ATR images)
Head pointer

34
How does it work?
Raw data is dumped into the buffer from the data sources A head pointer keeps incrementing Buffer is ready, but not live (active in pipeline) yet Example, ATR image data coming from sensors
Buffer becomes live in pipeline Raw data are consumed and/or forwarded New data are produced/consumed When a buffer is no longer needed by any pipeline stages, it is dead and
recycled
Is everything really independent? Yes! At each snapshot, each module is operating on different data

35
What are we trading off?
ab c
d
B
A
Speedcomputation intensity, parallelism,throughput,power
TimeResponse time,
delay
Workloadamount of computation, energy
a
bc
d
a b c dab c
da
b
cd
ab c d
36
N = 2
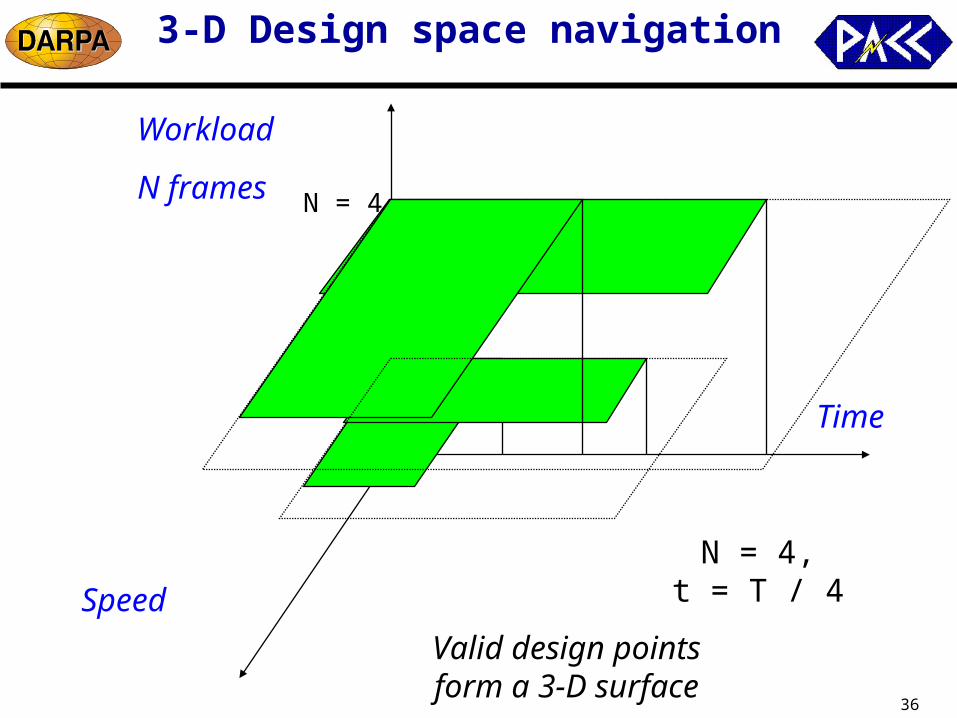
3-D Design space navigation
Speed
Time
Workload
N frames
N = 2,t = T / 2
N = 4,t = T / 4
N = 4
Valid design points form a 3-D surface

37
Design flow
IMPACCT pipeline code transformation
C Source code
Pipelined C Source code
COPPER power simulator
P T N
3-D table•Power•Time•Workload Task-level
constraints
System-level constraints
Power-aware schedule
IMPACCT scheduler and mode selection
abcd
DFG

38
Demo: power-aware ATR
Input N frames
Output N frames
Power-aware schedule and run-time power profile
Control panel, timing/power constraints, group size N

39
What it can do
Interactive performance monitor Run ATR (or any other) algorithms on PC, network or external boards Monitor power/performance at run-time Giving timing/power budget on the fly
System-level simulator Run ATR algorithms on (distributed) component-level simulators (e.g.
COPPER) Coordinate component-level simulators to construct the whole system Examine the power/performance on the system level with verified
results on components

40
What it can do
Dynamic power manager Apply dynamic power management policies Power management decision based on verified results from simulation Pre-examine different dynamic power management policies without the
real execution platform Out first stage to go dynamic
What’s in the current demo? ATR toolbox
Run ATR on different images Operate on all image formats, not only the .bin binary format
Performance monitor / simulator User inputs power/time/group size Power/time based on COPPER simulation results
Dynamic power manager Dynamic voltage/frequency scaling based on given timing constraints Only minimize power, not taking power budget into constraint yet
41
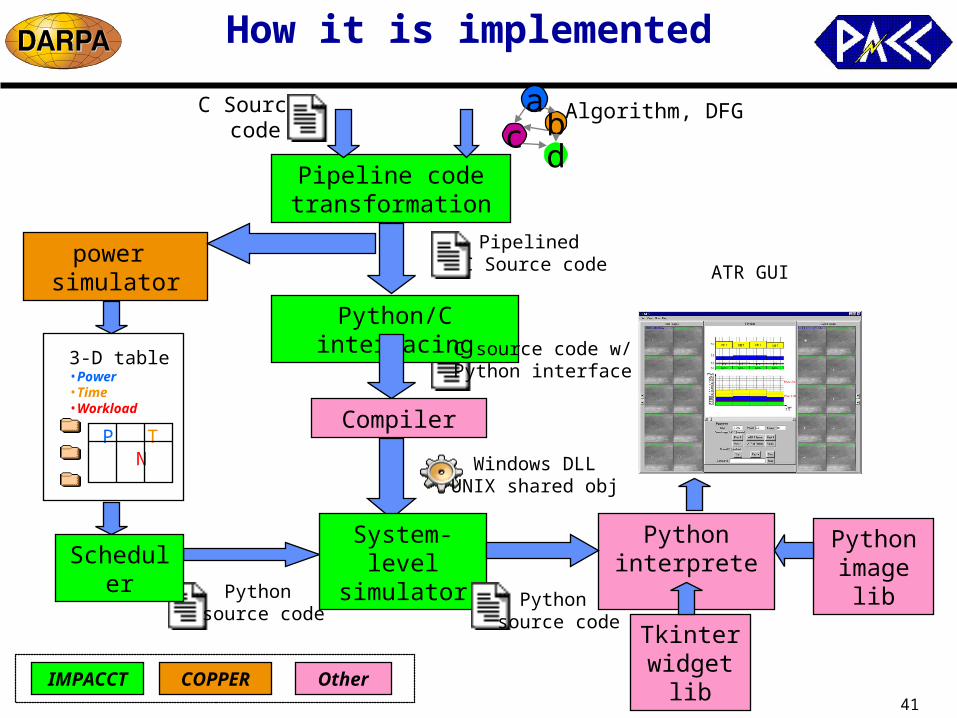
How it is implemented
Pipeline code transformation
C Source code
Pipelined C Source codepower
simulator
P T N
3-D table•Power•Time•Workload
abcd
Algorithm, DFG
Python/C interfacing
Scheduler
Compiler
C source code w/Python interface
Windows DLLUNIX shared obj
Python source code
System-level simulator
Pythoninterpreter
Python source code
Tkinterwidget lib
Pythonimage lib
ATR GUI
IMPACCT COPPER Other

42
What did we learn from this?
Component-level vs. system-level Component-level
Finer grain algorithms on specific data (FFT) Low-level programming (C code)
System-level Coerce grain algorithms on data flows (ATR) Increased level of programming (scripting, GUI)
System-level pipelining and code transformation More parallelism by eliminating data dependency Need automated compiler support
System-level simulation on ATR Can potentially plug in any other simulators, library modules Can integrate different component-level techniques Power management at system-level with more confidence Starting point to dynamic power management

43
Scheduling case study:Wavelet compression (JPL)
Algorithm in C Wavelet decomposition Compression: "knob" to choose lossy factor or lossless
Example category Dataflow, similar to DAATR Finer grained, better structure
IMPACCT improvements Transformation to enable pipelining Exploit lossy factor in trade space

44
Wavelet Algorithm
Wavelet Decomposition
Quantization
Entropy coding

45
Wavelet Algorithm structure
For all image blocks
Initialization(check params,
allocate memory)
block init.,set params, read image block
decomp(), (lossless FWT)
(remove overlap)
Bit_plane_decomp,(set decomp param)
(1st level entropy coding)
(bit_plane encoding) Output result to file
•Sequential execution blocks•No data dependency between image blocks

46
Wavelet: experiments
Experiments being conducted Checkpoints marked up manually Initial power estimation obtained Code being manually rewritten / restructured for pipelining Appears better structured than UAV example
Trade space High performance to low power Pipelining in space and in time, similar to UAV example Lossy compression parameter

47
Ongoing scheduling case study:Deep Impact
"Planning" level example Coarse grained, system level
Hardware architecture COTS PowerPC 750 babybed, emulating a Rad-Hard PPC at 4x
=> Models the X-2000 architecture using DS1 software COTS PowerPC 603e board, emulating I/O devices in real time
Software architecture vxWorks, static priority driven, preemptive JPL's own software architecture -- command based 1/8 second time steps; 1-second control loops
Task set 60 tasks to schedule, 255 priority levels

48
NASA Deep Impact project
Platform X-2000 configurable architecture to be using RAD 6000 (Rad-Hard PowerPC 750 @133MHz)
Testbed (JPL Autonomy Lab) PPC 750 single-board computer -- runs flight software
Prototype @233MHz, Real flight @133MHz COTS board, L1 only, no L2 cache
PowerPC 603e -- emulate the I/O devices connected via compact PCI
DS1: Deep Space One (legacy flight software ) Software architecture:
8 Hz ticks, command based running on top of vxWorks
Perfmon: performance monitoring utility in DS1 11 test activities 60 tasks

49
Deep Impact example (cont'd)
Available form: Real-time Traces Collected using Babybed 90 seconds of trace, time-stamped tasks, L-1 cache
Input needed Algorithm (not available) Timing / power constraints (easy) Functional constraints
Sequence of events Combinations of illegal modes
Challenges Modeling two layers of software architecture (RTOS + command)

50
Design Flow
componentlibrary
scheduler high-levelsimulator
modeselector
powersimulator
task model,timing /powerconstraints
Compiler
power profile,C program
modemodel
power + timingestimation
task allocation,component selection
CO
PP
ER
IMP
AC
CT
low-levelsimulator
executable

51
SMT Power Simulator
Simulator Features Compatible with SimpleScalar 3.0b
Execute PISA and EV6 binaries Portability – Run on most kinds of computers
Handling Simultaneous Multithreading Run up to 8 threads simultaneously Similar to UW SMT model
Power Aware Features Same analytic power model as WATTCH
Clock Gating Parameterized Models
42 functional unit classifications (WATTCH has 12) 10 dynamic activity factors (WATTCH has 4)

52
Examples of Module Classification
Functional Units include Arithmetic units: ALU, FPU, etc Control units: Instr decoder, etc Memory units: Caches, CAM, etc Buses: Result bus
Cache Access Cache Hit
Read Tag & Data Cache Miss
Read Tag Update Tag & Data Read Data
Arithmetic Operation: 4 groups Int ALU: +, -, bit operations Int MULT: , FP ALU: +, - FP MULT: ,
FP ALU
FP RegNormal FP Operation
FP MULT
FP RegFP Mult
Operation
ALU
Integer Reg
Integer ALU
Integer RegNormal Integer
Operation
Integer MULT
Integer RegInteger Mult Operation
Cache Tag X 2
Cache Array X 2Cache Miss
Cache Hit
Event
Cache
Cache Tag
Cache Array
Accessed units in WATTCH
Accessed units in SMT Power
Simulator

53
SMT Power Simulator
Project Status Performance Simulator – Done Power Simulator – Implementation is done Power parameter verification on going
Verification Methodology Analytic model
Proven models from WATTCH Comparison with COTS processors
Motorola PowerPC 7450 Intel mobile Pentium III Alpha 21264

54
Example of Verification with COTS Processors
Typical/Maximum Power Consumption Typical -> Average power consumption of applications Maximum -> Peak power consumption of applications Benchmark simulations are needed to verify
Modules in operation Deep Sleep: Nothing -> Static power dissipation Sleep: PLL working -> Static + PLL power dissipation Nap: BUS snooping -> Static + PLL + I/O power dissipation Doze: No instruction fetch -> no information
TBD
TBD
TBD
Doze
1.0
0.9
0.8
Sleep
0.512.122.219.017.91.8667
0.461.820.017.116.11.8600
0.411.617.815.214.31.8533
Deep Sleep
NapMax (Vec)
MaxTyp (W)
Vtg (V)
Freq (Mhz)
PowerPC 7450 Power Consumption

55
Example of Simulation Result
Processor Configuration 4 issue superscalar
Target programs: 4 simple test programs
Maximum power consumption 87.37W at 4 ICP (Instruction per cycle): Maximum throughput
Clock gating CC1: Max power for running units and zero for idle units CC2: Input dependent power for running units and zero for idle units CC3: Input dependent power for running units and static power for idle units
ATR
Test4
Test3
Test2
Test1
Program
16.8910.3715.2487.370.9449343
24.5119.2127.8787.371.445600494229
0.78
0.61
0.36
Instr per Cycle
12.17
9.95
6.90
CC1
8.31
6.83
4.48
CC2
15.0987.3719432
13.8587.3710560
11.7687.374859
CC3MAX# of Instr

56
SMT Simulation Methodology
Input C Program Executable Binaries
PISA EV6
Processor Parameters Architectural Parameters
Output Static Power Consumption
Program independent Dynamic Power Consumption
Program dependent Power Profile – Moving Avg.
Processorparameters
Target CProgram
PowerParameters
HostCompiler
crossCompiler
PowerSimulator
StaticPower
DynamicPower
DynamicProfile
57
SMT Power Simulator: Tool Usage
Host Portability Any host computer that can run SimpleScalar
Execution command sim-smt [options] target.list
List file content executable [program arguments]
Processor parameters -config configuration.file
Simulation results redirection -redir:sim simulator.result -redir:prog target.program.result

58
Mode Selection
Determine when what component is running at what mode
Mode selection is non-trivial Scheduler will be overwhelmed to determine component modes at the
same time! Exploration space of all mode combinations is tremendous Greedy solution may fail mission timing-constraints or power
constraints
Mode selection is worthwhile Exploration spaces exist to improve power reduction and power-
awareness Energy saving ( 5-15%) Cost saving: (10-40%) Ease the task planning and give a more realistic picture

59
Methodology and Design Flow
The whole picture - the integration of: Power-aware scheduler Mode selector Power estimation/profiling tools
Static view
Scheduler
Power Estimator
Initial schedule
modified schedule
Power/timing numberpower profile Power/timing budget
Power/timing budget
Power profile
Mode Selector

60
System Modeling
Component power model Power modes with overhead
System timing model Constraint graph
Mode dependency modeling Mode dependency graph
External parameters Environment temperature Surrounding terrain

61
Component Power Model
Power mode Each mode is defined by power and timing attributes
Constant, Profile, external (environmental) parameters May be hierarchical -- e..g. PowerPC 7450
active: { cache on: { cache settings }, cache off,voltage scaling, clock scaling },
doze: { clock scaling }, nap: { } deep sleep: { }
Overhead on mode changes Power overhead, timing overhead e.g. preheating a motor, voltage scaling, PLL
Environmental parameters e.g. temperature, terrain (roughness of ground for a motor) Affect power and timing overhead

62
Component Model Examples
Driving motor Power is function of Temperature Mode change time also function
of Temperature T
Microprocessor (PowerPC 603e)
off on0WPower: –0.1225*T + 1.0
Power: 2.2WTime: (–1.875*T+10)*(T<0) +10*(T≥0)
Power: 0.5WTime: 3
Full power
Doze Nap Sleep
DPM4.0W 3.2W
1.0W 70mW 40mW
10 cycles -
10 cycles -
10 cycles -
10 cycles - 100us + 255 bus clocks + 10 cycles
100us + 255 bus clocks + 10 cycles
t1 + 3 cycles3 cycles t1 + 3 cycles

63
FireWire Bus Power Model
Cable Power Pc = µ·L ·Cf (µ: constant, L: cable length, Cf: data transfer rate)
Driver Power (Pd) Fast lookup table Protocol simulator (in progress)
Event-driven system-level simulator Generated event traces for high level power estimation
Bus Power Pbus = Pc + Pd 100MHz 200MHz 400MHz
Full-on 320 mW 350mW 380 mW
Idle 250mW 250mW 250mW
Ultra low power 0.5 mW 0.5 mW 0.5 mW
TSB41AB3 IEEE 1394a-2000 THREE-PORT CABLETRANSCEIVER/ARBITER

64
Design Flow
componentlibrary
scheduler high-levelsimulator
modeselector
powersimulator
task model,timing /powerconstraints
Compiler
power profile,C program
modemodel
power + timingestimation
task allocation,component selection
CO
PP
ER
IMP
AC
CT
low-levelsimulator
executable

65
Timing: Constraint graph
Min/max timing constraints between pairs of events
Vertices Represent events A task has a Start and an End event
e.g. A.s = start event of task A, B.e = end event of task B
Directed edges Weights on edges Nonnegative weight: min constraint Negative weight: -max constraint
A.s B.e10
End event of B should be no earlier than 10 time units after the start event of A
A.s B.s-10
Start event of B should be no later than 10 time units after the start event of A

66
System Timing Modeling Example
Haz.e drv.e5 cam.s1drv.s-10
ppc1.s ppc2.s-20
ppc1.e
sci.s1
rf.e
str.s
1
str.s-5
1
1
-30
Haz: hazard detectorStr: steering motorDrv: driving motorCam: cameraPpc: processorSci: scientific deviceRf : radio frequency modem
Micro Rover example Multiple resources Timing constraints between tasks

67
Mode Dependency Modeling
Functional modes examples: ATR -- short range, middle range behavior choice as dictated by functional requirements
(i.e., not controllable by power management)
Component modes examples: processor full-on, sleep, doze, voltage/clock scaling operational setting of component
(i.e., open to mode selection for meeting power/timing constraints)
Dependencies Among functional modes (of different activities) Among component modes Between functional and component modes
e.g., ATR in short-range mode, Processor running in high-clock rate
68
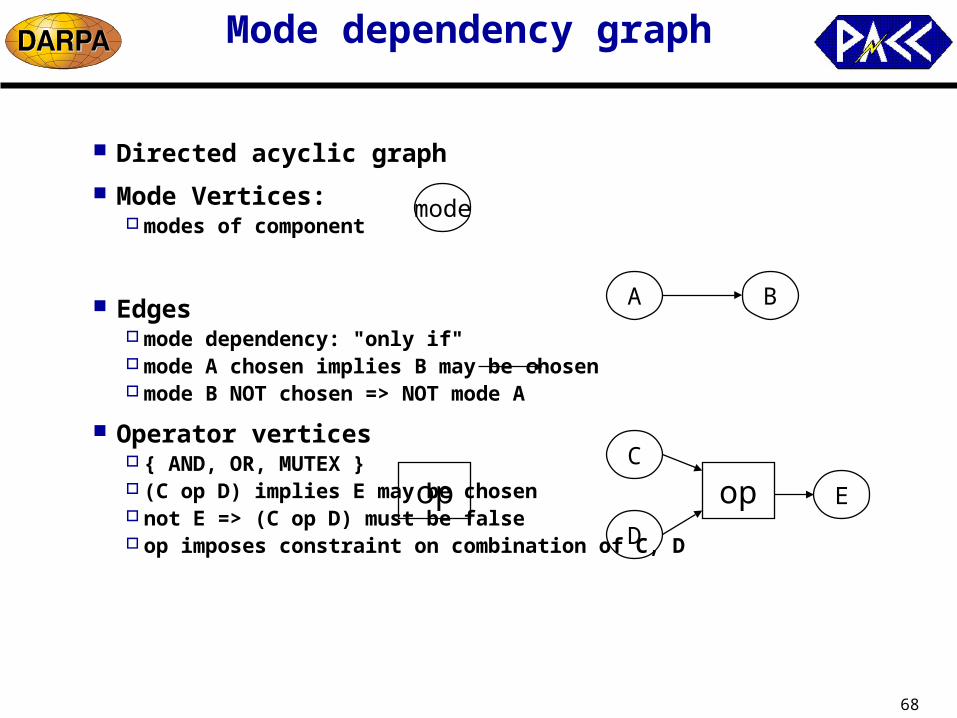
Mode dependency graph
Directed acyclic graph
Mode Vertices: modes of component
Edges mode dependency: "only if" mode A chosen implies B may be chosen mode B NOT chosen => NOT mode A
Operator vertices { AND, OR, MUTEX } (C op D) implies E may be chosen not E => (C op D) must be false op imposes constraint on combination of C, D
A B
C
D
op E
mode
op

69
Mode dependency example: Rover
haz: hazard detectorstr: steering motordrv: driving motor
haz.on
str.ondrv.on
ORMUTEX
Components hazard detector, driving motor,
steering motor
Constraints on modes: hazard detector and the motors should
not be working at the same time
Mode combinations
Hazard detector Driving motor Steering motor
M0 Off Off Off
M1 Off On Off
M2 Off Off On
M3 Off On OnM4 On Off Off

70
Mode Modeling Example:µAMPS sensors
Components: processor, memory, RF, sensor
Constraints on modes: Processor is active when both radio and
sensor is active Memory is active only when processor is
active
Microsensor architecture
S.on
R.onAND
S.on
R.rx XOR
A.sleep
A.active M.on
R.rx_tx
MUTEXA.idle
A.sleep
A:ARMM:memoryR: radioS: sensor
A.activeM.on

71
Mode Modeling of µAMPS sensors(cont’d)
Mode combinations considered: by MIT group: 5 combinations manual grouping, ad hoc
Our method 3 more combinations systematically generated from
dependency graph
Add constraint: When sensor is off, all other component
should be off (proactive)
Automatically obtain same results as MIT group
Mode S R A M
M0 On Tx,rx Active On
M1 On Rx Idle Off
M2 On Rx Sleep Off
M3 On Off Sleep Off
M4 Off Tx,rx Active On
M5 Off Rx Idle Off
M6 Off Rx Sleep Off
M7 Off Off Sleep Off
Not
giv
en b
y M
IT g
rou
pR.on S.on

72
Mode Combination Enumeration- Using Dependency Graph
Component level mode dep. graph Group modes by component Show mode dependency between
components
Enumerating reachable modes Topological sorting Graph helps prune out infeasible
mode combinations
Break cycle in comp. graph Removing an edge in cycle Keep track of the last dependent
successor component
Radio
Sensor
ARM Memory
RadioSensor ARM Memory
off off sleep off
on off sleep off
idle off
on idle off
active on

73
External Parameters & Constraints
Parameters in system model Temperature, terrain Used to characterize
components and their overhead
System Constraints Maximum Power constraint
Constant or power profile (function of time)
Minimum Power constraint Constant or power profile (
function of time) Total energy constraint ( under
working) Mission time (mission deadline)
Temperature (C) Power (W)
0 1.0
-40 5.9
-80 9.6
Power consumption of Driving motor at different temperatures

74
System Power Representation
Schedule Gantt Chart
Time view Power view
Mode selection Gantt chart
Tasks marked with mode settings
Added non-operating tasks Idle intervals mode change
overheads Power profile view

75
Design Flow
componentlibrary
scheduler high-levelsimulator
modeselector
powersimulator
task model,timing /powerconstraints
Compiler
power profile,C program
modemodel
power + timingestimation
task allocation,component selection
CO
PP
ER
IMP
AC
CT
low-levelsimulator
executable
76
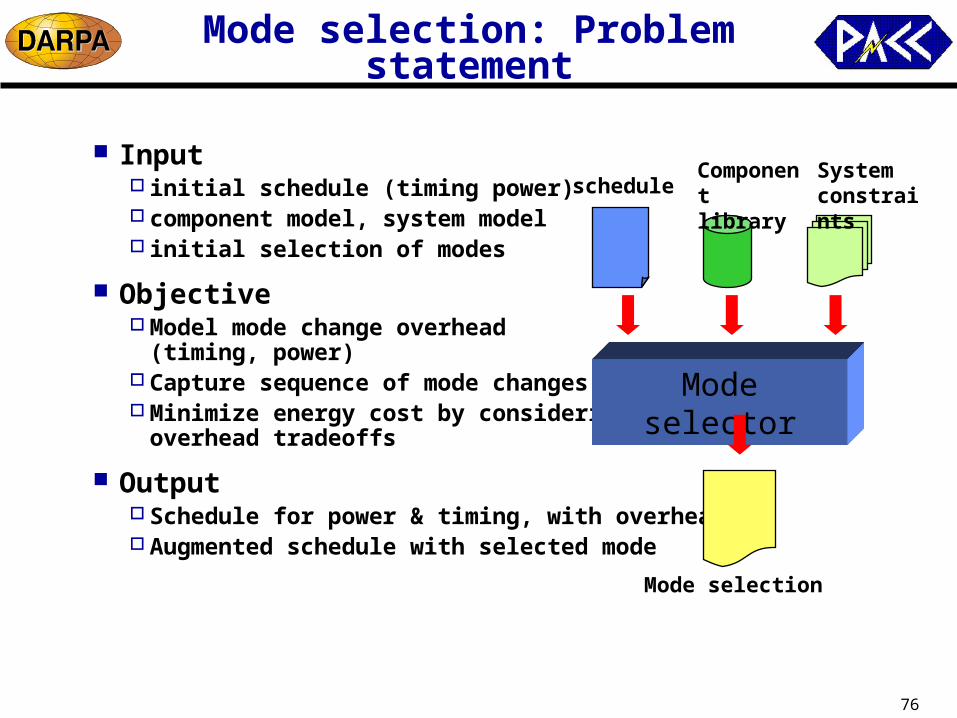
Mode selection: Problem statement
Input initial schedule (timing power) component model, system model initial selection of modes
Objective Model mode change overhead
(timing, power) Capture sequence of mode changes Minimize energy cost by considering
overhead tradeoffs
Output Schedule for power & timing, with overhead Augmented schedule with selected mode
Mode selector
scheduleComponent library
System constraints
Mode selection
77
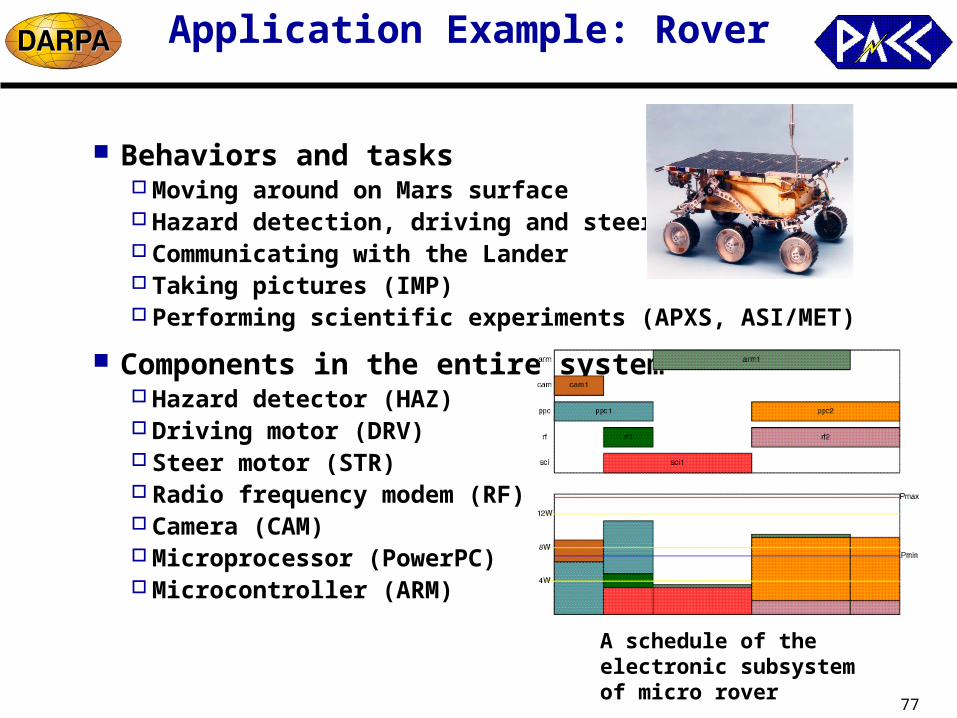
Application Example: Rover
Behaviors and tasks Moving around on Mars surface Hazard detection, driving and steering Communicating with the Lander Taking pictures (IMP) Performing scientific experiments (APXS, ASI/MET)
Components in the entire system Hazard detector (HAZ) Driving motor (DRV) Steer motor (STR) Radio frequency modem (RF) Camera (CAM) Microprocessor (PowerPC) Microcontroller (ARM)
A schedule of the electronic subsystem of micro rover

78
Mode selection Results:Energy savings
Traditional approach Only two modes: { On, Off } Timing constraints ONLY Power constraints may be violated Considers mode change overhead
Our Approach:with Mode Selection All legal mode combinations Both timing and power constraints Detailed mode change overhead
Results Energy saving: 3.7% to 11.9% average saving: 8.7%
1300
1350
1400
1450
1500
1550
1600
1650
1700
1750
5 6 7 8 9 10
Mode SelectionOn&Off
Pmin(W)
Energy(J)

79
Results for mode selection:Cost savings
Cost vs. Energy saving: Cost defined as energy above
minimum constraints
Savings From 6.9% to 49.3% average 26.5%
0
100
200
300
400
500
600
700
800
900
1000
5 6 7 8 9 10
Mode Selection
On&Off
Pmin (W)
Energy (J)

80
Exploring Different Working Scenarios
Three tasks Moving around (MOV) Taking picture (CAM) Scientific experiment (SCI)
Three scenarios A: MOV, CAM, SCI B: CAM, MOV, SCI C: CAM, SCI, MOV
Temperature profile is given as: Temperature
-90
-80
-70
-60
-50
-40
-30
-20
-10
01 2 3 4 5 6
123456

81
Result III
Scenarios consume different amounts of energy Scenario C consumes 12%
more energy than scenario A (by mode selection)
Mode selection always does better compared to (on, off) only up to 11.7% energy saving
0
5000
10000
15000
20000
25000
A B C
Mode SelectionOn&off
82
Mode selection: Issues
Challenges: Explosion of state space -- grows exponentially Modeling restrictions in mode change sequence
Solution / novelty Formalism for mode dependency at component level & system level Systematically prune search space
Experimental results Energy and time saved More accurate modeling of overhead

83
Accomplishments to date
Power-aware scheduling Multi-processor/domain, Min / Max power and timing constraints 3 classes of system level pipelining techniques
Mode selection Component and system model Captures power & timing overhead on mode change
Incorporating power models and simulators SMT simulator for advanced microarchitectural exploration FireWire, DRAM, cache, PowerPC
Tool prototype & Integration GUI for power-aware Gantt chart scheduling & mode selection Power aware visualization tool for benchmarks Interface to COPPER project

84
Lessons learned
Challenges Not all applications fit a given model Alternative design flows may be required for different applications Manually extract parallelism & dependency in benchmarks Capture mode dependency in components & applications Integration of good power models for PowerPC
Right level of abstraction Many low-level power models available; not always usable Need system-level power estimations Details of the architecture model Memory / bus power models Overhead for voltage/frequency scaling

85
Fulfilled Milestones
Power-aware scheduling [3 papers] Multi-scenario System-level pipelining
Mode selection encompass power management (voltage/freq scaling)
UI prototype scheduling, mode selection, benchmark visualization
Initial tool integration interface to COPPER
Processor power & simulation models SMT simulator

86
Upcoming Milestones
Dynamic optimization Scheduling and planning -- using the Deep Impact example Pipeline depth/width tuning at run-time
Additional static optimization component selection/assignment bus topology optimization
Simulation Bus simulation models SMT -- Thermal dissipation profiling,
Dynamic power/thermal management
Tool integration Simulation models from other groups IMPACCT tools and library tighter integration between IMPACCT and COPPER

87
Ideas: dynamic optimization
More dynamic scenarios Power suddenly cut off, with small power reserve before shutdown Mission replanning, changing objectives
Solutions required Division between static preparation & dynamic handling Ability to decide most important actions to take under extreme time
constraint Need feedback/notification mechanism in execution model Decentralized power management
Need new benchmark examples

88
Future planned evaluation
Deep Impact from JPL Mission planning and scheduling example Image compression (wavelet) algorithm Architectural mapping
JPL Testbed PPC750 board to measure actual power PPC750 to simulate instrumentation in real-time advanced board with real instrumentation
Validation through simulation Scheduler output fed to COPPER for compilation Simulation via COPPER and our own SMT Compare estimated power with refined version

89
Applications
Space Mars Rover (scheduling, mode selection) Deep Impact (planning)
UAV DAATR (pipelined scheduling)
(mode selection under investigation)
Distributed sensors MIT µAMPS sensor (mode selection)
Need apps requiring dynamic planning/reconfig!

90
Development plans
Scripting and web-based tool Jython (Java + Python), TkInter for GUI prototype Core scheduler
Modular, detachable from GUI Option to run on separate server or same process as UI
CGI scripts for arch. configuration (unix/web based) Latest version distributed thru WebCVS
Interface with commercial CAD backend Detailed power estimation tools Functional simulation with proprietary models
Rationale Open source, runs on any platform All publicly available development tools Trivial to install, no compilation, encourage modification
91
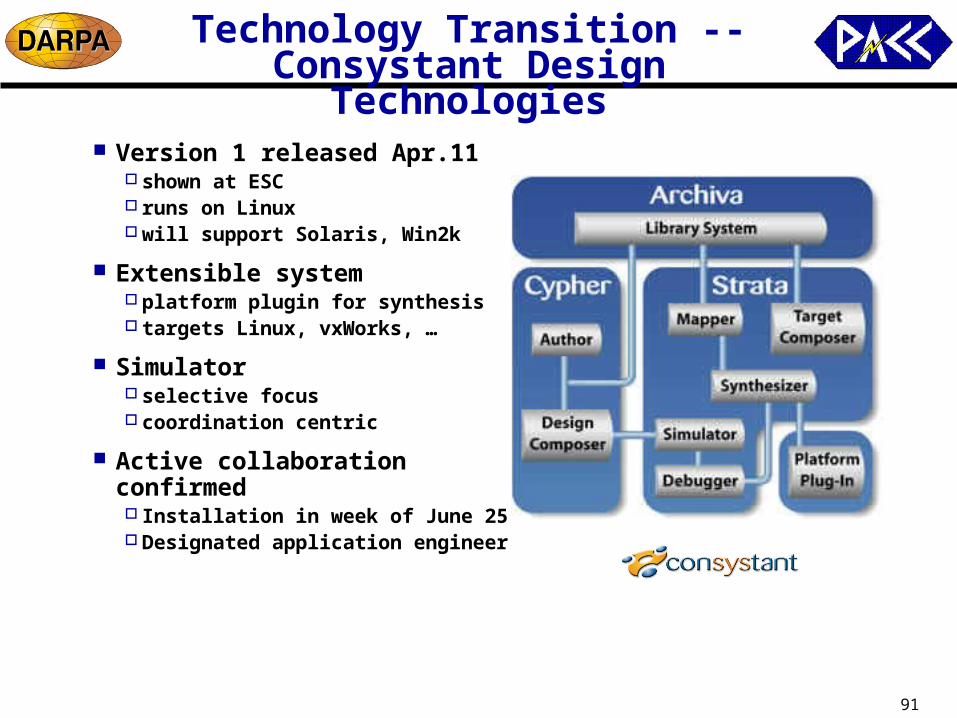
Technology Transition --Consystant Design Technologies
Version 1 released Apr.11 shown at ESC runs on Linux will support Solaris, Win2k
Extensible system platform plugin for synthesis targets Linux, vxWorks, …
Simulator selective focus coordination centric
Active collaboration confirmed Installation in week of June 25 Designated application engineer

92
http://www.ece.uci.edu/impacct/
93
Metrics
Source-aware energy model Takes “free energy” into account Cost for not using free energy
Profile-aware Total energy dependent on consumers’ power profile Smoothness of power draw
Scenario-aware Cost function tracks external factors (e.g. temperature, solar level) Stage in mission
Timing/performance Makespan (length of an iteration) Dynamic planning cost

94
Architectural Configuration
Mode selection Power consumption level (doze, nap, sleep, etc.) Low power design techniques
Clock scaling, voltage scaling Memory/cache configurations, bus encoding Communication protocols, compression, algorithm transformations
Optimize feasible solutions for energy/timing costs Power, Real time, Inter-resource modes constraints Constraints between functionality modes and resources modes
Functionality mode and resource modes
Bus topology optimization Static clustering and bus partitioning Dynamic reclustering with shutdown
95
Application - Mars Rover
Mission-critical embedded system Hard real-time system Composed of COTS component
Electronic: µprocessor, µcontroller, memory,camera, scientific devices, ... Mechanics/thermal: driving motor, steering motor, heaters, … Power sources: solar panel, battery
Power/energy and performance constraints Stringent max power constraint Flexible min power constraint Limited non-rechargeable energy sources Global timing requirement
Limited working window during sol daytime Timing constraint among tasks
Harsh and uncertain working environment Extremely low temperature - affects component behaviors Uncertain environment: winds/obstacles/rugged terrain

96
Example Platform- X2000
COTS components Modeling Processors (PowerPC 603e, 750) Memory organization (cache, memory) System interconnects (FireWire bus driver/controller) Scientific equipment Sensors/actuators Mechanics/Thermals (driving/steering motors/heaters)
System-level architecture modeling Tree topology for FireWire bus architecture Component clustering for bus segmentation

97
Testing Methodologies
A "Activity" for given duration (5 s, 10 s, 15 s) repeated 6 times record both I-cache & D-cache misses (recorded in separate runs)
B Recording 90 seconds worth of an Activity till its completion 1 minute gap between runs also I-cache & D-cache misses
C -- what is measurement C?
98
User Input
Attributes tasks, resources, timing constraints, power budgets
Unique features power as constraint scheduling, system-level mission planning, power-aware loop
pipelining, timing constraint classification. subsumes deadline, dataflow
Language mix of graphical and custom constraint language

99
Methodology and Work Flow
Exploration techniques Backtracking Cutting exploration space with multi-dimensional constraints
Two steps in design exploration: Find feasible mode selection for operating tasks
Timing constraints Constraint graph Resource slacks Mission deadline
Dependency between tasks Dependency graph
Find feasible mode selections for idle intervals System power/energy constraints: min, max, or power profile Mode change overhead, both time and power overheads
Speedup techniques Sorting component modes with power numbers