integrable decomposition of a hierarchy of soliton equations and integrable coupling system by...
TRANSCRIPT

Nonlinear Analysis 69 (2008) 3450–3461www.elsevier.com/locate/na
Integrable decomposition of a hierarchy of soliton equations andintegrable coupling system by semidirect sums of Lie algebras
Lin Luoa,b,∗, Engui Fanb
a Department of Mathematics, Xiaogan University, Xiaogan 432100, Hubei, Chinab School of Mathematical Sciences, Fudan University, Shanghai 200433, China
Received 5 September 2007; accepted 21 September 2007
Abstract
Staring from a new spectral problem, a hierarchy of the soliton equations is derived. It is shown that the associated hierarchiesare infinite-dimensional integrable Hamiltonian systems. By the procedure of nonlinearization of the Lax pairs, the integrabledecomposition of the whole soliton hierarchy is given. Further, we construct two integrable coupling systems for the hierarchy bythe conception of semidirect sums of Lie algebras.c© 2007 Elsevier Ltd. All rights reserved.
MSC: 02.30.Ik
Keywords: Soliton equations; Nonlinearization; Integrable couplings; Semidirect sums of Lie algebras
1. Introduction
A central and difficult topic in the study of integrable systems is to find Liouville integrable systems which possessphysical significance. Nonlinearization technique, which was put forward first by Cao [1,2], has proved to be apowerful tool for obtaining new finite-dimensional integrable Hamiltonian systems. In the past two decades, Cao’swork has developed greatly and many kinds of generalizations such as the method of Binary nonlinearization [3], theconstraint method of higher order symmetry [4], and the adjoint symmetry constraint method [5] have been made andapplied to a wide variety of soliton equations successfully [6–13], including continuous and discrete soliton equations.
Recently, Integrable coupling systems have been receiving growing attention by the conception of semidirectsums of Lie algebra. There exist plenty of examples of both continuous and discrete integrable couples belongingto such a class of integrable equations [15–24]. We know that an arbitrary Lie algebra has a semidirect sumstructure of a solvable Lie algebra and a semisimple Lie algebra. The semidirect sum decomposition of Lie algebraallows more classifications of integrable equations supplementing existing theories [25]. Moreover, the study ofintegrable couplings also generates many interesting mathematical structures such as Lax representation, infinitelymany symmetries and local Hamiltonian structures in higher dimensions and hereditary recursion operators of higherorder [18,23,24].
∗ Corresponding author at: Department of Mathematics, Xiaogan University, Xiaogan 432100, Hubei, China.E-mail address: [email protected] (L. Luo).
0362-546X/$ - see front matter c© 2007 Elsevier Ltd. All rights reserved.doi:10.1016/j.na.2007.09.032

L. Luo, E. Fan / Nonlinear Analysis 69 (2008) 3450–3461 3451
In this paper, we consider the nonlinearization of a generalized Kaup–Newell (KN) spectral problem and itsintegrable couplings by semidirect sums of Lie algebras. This paper is organized as follows: In Section 2, we willderive a new soliton hierarchy from a spectral problem. It is shown that the hierarchy is Liouville integrable, and itsbi-Hamiltonian structure is established by trace identity. In Section 3, Under the Bargmann symmetry constraints, theLax pairs of the hierarchy are nonlinearized into finite-dimensional completely integrable Hamiltonian systems. InSection 4, we would like to discuss the integrable couplings of the hierarchy by the conception of semidirect sums ofLie algebras. Some conclusions are given in the final Section.
2. The soliton hierarchy and Hamiltonian structure
We introduce a new generalized KN spectral problem
ϕx = Uϕ =
(λ2
+ αq λqλr −λ2
− αq
)ϕ, (2.1)
where q = q(x, t) and r = r(x, t) are two potentials, λ ∈ C is a spectral parameter and α is an arbitrary constant. Todeduce the new soliton hierarchy, we first solve the adjoint representation of Eq. (2.1),
Vx = [U, V ] = U V − V U, V =
(a bc −a
), (2.2)
which is equivalent to
ax = λqc − λrb,
bx = 2[(λ2+ αq)b − λqa],
cx = 2[−(λ2+ αq)c + λra].
Substituting
a =
∑j≥0
a jλ−2 j , b =
∑j≥0
b jλ−2 j−1, c =
∑j≥0
c jλ−2 j−1, (2.3)
into the above equations gives the following recursive formulae:
a j x = qc j − rb j ,
b j x = 2(b j+1 + αqb j − qa j+1),
c j x = 2(−c j+1 − αqc j + ra j+1).
(2.4)
From these equations, we can successively deduce
a0 = 1, b0 = q, c0 = r, a1 = −12
qr,
b1 =12
qx − αq2−
12
q2r, c1 = −12
rx − αqr −12
qr2, (2.5)
a2 =14(qrx − rqx ) +
12
q2r2+ αq2r,(
c j+1b j+1
)= L1
(c jb j
), (2.6)
with
L1 =
−12∂ − αq − αr∂−1q2
−12
r∂−1q∂ αr∂−1qr −12
r∂−1r∂
−αq∂−1q2−
12
q∂−1q∂12∂ − αq + αq∂−1qr −
12
q∂−1r∂
. (2.7)

3452 L. Luo, E. Fan / Nonlinear Analysis 69 (2008) 3450–3461
Consider the auxiliary spectral problem associated with (2.1)
ϕtn = V (n)ϕ, (2.8)
where
V (n)= (λ2n+2V )+ +
(bn 00 −bn
)=
n∑j=0
(a jλ
2n−2 j+2 b jλ2n−2 j+1
c jλ2n−2 j+1
−a jλ2n−2 j+2
)+
(αbn 0
0 −αbn
). (2.9)
Then the compatibility conditions between (2.1) and (2.8) gives the zero curvature equation Ut −V (n)x +[U, V (n)
] = 0,that is,
utn , Kn(u) =
(bnx
2αanx + cnx
), u = (q, r)T, (2.10)
which is a hierarchy of new soliton equations associated with spectral problem (2.1).In the following we will establish the bi-Hamiltonian structure for the hierarchy (2.10), and show that they are
integrable in Liouville’s sense. In order to apply the trace identity [26], we need to rewrite (2.10) in another form. Weintroduce
G j ,
(2αa j + c j
b j
), (2.11)
then
(c j+1b j+1
)= L2G j =
−12∂ −
12
r∂−1q∂ −αr −12
r∂−1r∂
−12
q∂−1q∂12∂ − αq −
12
q∂−1r∂
G j , (2.12a)
and
G j+1 = LG j =
−12∂ −
12
r∂−1q∂ − α∂−1q∂ −αr −12
r∂−1r∂ − α∂−1r∂
−12
q∂−1q∂12∂ − αq −
12
q∂−1r∂
G j , (2.12b)
where L2L = L1L2.We take the Killing–Cartan form 〈A, B〉 as tr(AB), then direct calculation gives⟨
V,∂U
∂λ
⟩= 4λa + rb + qc,
⟨V,
∂U
∂q
⟩= 2αa + λc,
⟨V,
∂U
∂r
⟩= λb. (2.13)
By using trace identity, we have
δ
δu(4λa + rb + qc) = λ−γ ∂
∂λ(λγ (2αa + λc, λb)T), (2.14)
where u = (q, r)T.Substituting (2.3) into the above equation leads to
δ
δu(4an+1 + rbn + qcn) = (γ − 2n)Gn . (2.15)
To fix the γ , we let n = 0 in (2.15) and find γ = 0. Therefore we conclude that
Gn =δHn
δu, Hn = −
12n
(4an+1 + rbn + qcn), n ≥ 1 (2.16)
with H0 = 2αq + qr .

L. Luo, E. Fan / Nonlinear Analysis 69 (2008) 3450–3461 3453
Combining (2.10) and (2.16) gives the desired Hamiltonian structure of the hierarchy (2.10).
utn = Kn(u) = JδHn
δu= K
δHn−1
δu, u = (q, r)T, (2.17)
where
J =
(0 ∂
∂ 0
), K = J L =
−12∂q∂−1q∂
12∂2
− α∂q −12∂q∂−1r∂
−12∂2
− αq∂ −12∂r∂−1q∂ −
12∂r∂−1r∂ − α∂r − αr∂
. (2.18)
Theorem 2.1. The Hamiltonian functions {Hm}∞
m=0 defined by (2.16) are conserved densities of the whole hierarchy(2.10). In other words, the hierarchy (2.10) is a completely integrable Hamiltonian system in the Liouville sense.
Proof. It is easy to see that J L = L∗ J , where L∗ denotes the conjugate of L . Then we have
{Hm, Hl} =
(δHm
δu, J
Hl
δu
)= (Lm G0, J Ll G0) = (Lm G0, L∗ J Ll−1G0)
= (Lm+1G0, J Ll−1G0) = {Hm+1, Hl−1}.
Repeating the above argument gives
{Hm, Hl} = {Hl , Hm} = {Hm+l , H0}. (2.19)
On the other hand, we have
{Hm, Hl} = (Lm G0, J Ll G0) = (J ∗Lm G0, Ll G0) = −{Hl , Hm}. (2.20)
Combining (2.19) with (2.20) gives
{Hm, Hl} = 0,
which implies that {Hm}∞
m=0 are in involution. Furthermore, we have(∫Hmdx
)tl
=
(δHm
δu, utl
)=
(δHm
δu, J
δHl
δu
)= {Hm, Hl} = 0.
This implies that {Hm}∞
m=0 are conserved densities. So this proof is completed. �
Example. When n = 1, the soliton hierarchy (2.10) is reduced to a new generalized derivative nonlinear Schrodingerequation [4,14]
qt1 =12
qxx − 2αqqx −12(q2r)x ,
rt1 = −12
rxx − 2α(qr)x −12(qr2)x ,
(2.21)
which are Liouville integrable and possess the bi-Hamiltonian structure
utn = JδH1
δu= K
δH0
δu, u = (q, r)T,
with H0 = qr, H1 = −14 qrx +
14 qxr −
12 q2r2
− αq2r .
Remark. As α = 0, the spectral problem (2.1) reduces to the Kaup–Newell spectral problem [14]
ϕx =
(λ2 λqλr −λ2
),

3454 L. Luo, E. Fan / Nonlinear Analysis 69 (2008) 3450–3461
and the soliton hierarchy (2.10) leads to the well-known Kaup–Newell hierarchy
utn = Kn(u) = JδHn
δu= K
δHn−1
δu, u = (q, r)TT .
where
J =
(0 ∂
∂ 0
), K = J L =
−12∂q∂−1q∂
12∂2
−12∂q∂−1r∂
−12∂2
−12∂r∂−1q∂ −
12∂r∂−1r∂
(2.22)
and H0 = qr, Hn, (n ≥ 1) satisfies Eq. (2.16).
3. Finite-dimensional integrable system
We consider N copies of the spectral problem (2.1) with N distinct nonzero parameters λ j , 1 ≤ j ≤ N . Then thefunctional gradient λ j with respect to u = (q, r)T is
δλ j
δu=
(δλ j
δq,δλ j
δr
)T
= (2αϕ1 jϕ2 j + λ jϕ22 j , −λ jϕ
21 j )
T. (3.1)
Making use of Eq. (2.1), direct verification indicates that
Lδλ j
δu= λ2
jδλ j
δu. (3.2)
Consider the Bargmann constraint
G0 =
N∑j=1
δλ j
δu, (3.3)
that is,
q = −〈∧ϕ1, ϕ1〉, r = −2 + 2α〈ϕ1, ϕ2〉 + 〈∧ϕ2, ϕ2〉, (3.4)
where ϕ1 = (ϕ11, . . . , ϕ1N )T, ϕ2 = (ϕ21, . . . , ϕ2N )T, ∧ = diag(λ1, . . . , λN ), and 〈., .〉 denotes the standard innerproduct in RN . Under the constraint (3.4), Eq. (2.1) are nonlinearized into a finite-dimensional Hamiltonian system(FDHS).
ϕ1x = ∧2 ϕ1 − α〈∧ϕ1, ϕ1〉ϕ1 − 〈∧ϕ1, ϕ1〉 ∧ ϕ2
=∂ H
∂ϕ2,
ϕ2x = − ∧2 ϕ2 + α〈∧ϕ1, ϕ1〉ϕ2 + (−2 + 2α〈ϕ1, ϕ2〉 + 〈∧ϕ2, ϕ2〉) ∧ ϕ1
= −∂ H
∂ϕ1, (3.5)
whose Hamiltonian function H is
H = 〈∧2 ϕ1, ϕ2〉 − α〈∧ϕ1, ϕ1〉〈ϕ1, ϕ2〉 −
12〈∧ϕ1, ϕ1〉〈∧ϕ2, ϕ2〉 + 〈∧ϕ1, ϕ1〉.
Making use of (3.3), by a direct and tedious calculation, then a j , b j , c j , j ≥ 0 in (2.3) can become respectively
a j = 〈∧2 j ϕ1, ϕ2〉 j ≥ 1,
b j = −〈∧2 j+1 ϕ1, ϕ1〉 j ≥ 0,
c j = 〈∧2 j+1 ϕ2, ϕ2〉 j ≥ 1,
(3.6)
with a0 = 1, c0 = −2 + 2α〈ϕ1, ϕ2〉 + 〈∧ϕ2, ϕ2〉.

L. Luo, E. Fan / Nonlinear Analysis 69 (2008) 3450–3461 3455
Now we define
V =
∞∑j=0
(a jλ
−2 j b jλ−2 j−1
c jλ−2 j−1
−a jλ−2 j
), (3.7)
and according to the Ref. [4], we have the following Lemma:
Lemma 3.1. The Bargmann system (3.5) enjoys the Lax equation
Vx = [U , V ].
Thus, from Lemma 3.1, it is easy to see that there is a natural set of integrals of motion generated by the relation
Fx , ( a2+ bc )x =
(12
trV 2)
x= 0.
Let F =∑
j≥0 Fmλ−2 j , then, we obtain the following expressions:
F0 = 1,
F1 = 2〈∧2 ϕ1, ϕ2〉 − 〈∧ϕ1, ϕ1〉(−2 + 2α〈ϕ1, ϕ2〉 + 〈∧ϕ2, ϕ2〉) = 2H, (3.8a)
Fm = 2〈∧2m ϕ1, ϕ2〉 − 〈∧
2m−1 ϕ1, ϕ1〉[−2 + 2α〈ϕ1, ϕ2〉 + 〈∧ϕ2, ϕ2〉]
+
m−1∑i=1
〈∧2i ϕ1, ϕ2〉〈∧
2m−2i ϕ1, ϕ2〉 −
m−2∑i=0
〈∧2i+1 ϕ1, ϕ1〉〈∧
2m−2i−1 ϕ2, ϕ2〉,
m ≥ 2, (3.8b)
which implies F j , j ≥ 0 are the integrals of motion of the system (3.5).Now, in the same way, we discuss the nonlinearization of the temporal part, under the Bargmann constraint (3.3),
auxiliary spectral problem (2.8) becomes(ϕ1ϕ2
)tm
= V (m)
(ϕ1ϕ2
), (3.9a)
with
V (m)= (λ2m+2V )+ +
(αbm 0
0 −αbm
), (3.9b)
where V , bm are defined as in (3.6) and (3.7).Through a simple calculation, we find that (3.9) can be rewritten as the following finite-dimensional Hamiltonian
system
ϕ1tm =∂ 1
2 Fm+1
∂ϕ2, ϕ2tm = −
∂ 12 Fm+1
∂ϕ1, m ≥ 0 (3.10)
where Fm+1, m ≥ 0 is defined as in (3.8).Similarly, we also see that Bargmann constraint system (3.10) has the Lax equation
Vtm = [V (m), V ]. (3.11)
Thus we know that Fm, m ≥ 0 in (3.8) are also the integrals of motion for (3.10).Next we show the integrability of FDHS (3.5) and (3.10). We consider the standard symplectic structure on R2N ,
the Poisson bracket for two smooth functions f and g in the symplectic space (R2N , dϕ1 ∧ dϕ2) is defined:
{ f, g} =
N∑j=1
(∂ f
∂ϕ1
∂g
∂ϕ2−
∂ f
∂ϕ2
∂g
∂ϕ1
),

3456 L. Luo, E. Fan / Nonlinear Analysis 69 (2008) 3450–3461
which is skew-symmetric, bilinear, and satisfies the Jacobi identity. In particular, f and g are called in involution if{ f, g} = 0.
Lemma 3.2. F1, F2, . . . Fm are in involution with each other.
Proof. A direct calculation gives
{Fm, Fn} = −dFm
dtn.
From Lax presentation (3.11) we get
dFm
dtn= 0,
which implies
{Fm, Fn} = 0.
so the Lemma is proved.
Lemma 3.3. F1, F2, . . . Fm are functionally independent over some region of R2N .
Proof. Direct computation leads to
∂ Fm
∂ϕ1
∣∣∣∣ϕ1=0
= 2 ∧2m ϕ2, m ≥ 1.
Therefore we obtain
det
∂ F1
∂ϕ11
∂ F2
∂ϕ11. . .
∂ FN
∂ϕ11∂ F1
∂ϕ12
∂ F2
∂ϕ12. . .
∂ FN
∂ϕ12. . . . . . . . . . . .∂ F1
∂ϕ1N
∂ F2
∂ϕ1N. . .
∂ FN
∂ϕ1N
∣∣∣∣∣∣∣∣∣∣∣∣∣ϕ1=0
= 2N λ21 . . . λ2
N ϕ21 . . . ϕ2N det
1 λ2
1 . . . λ2N−21
1 λ22 . . . λ2N−2
2. . . . . . . . . . . .
1 λ2N q . . . λ2N−2
N
= 2N λ21 . . . λ2
N ϕ21 . . . ϕ2N
∏i 6= j
(λ2i − λ2
j ).
This means that functions F1, F2, . . . FN can be functionally independent at least over some region of R2N .
From Lemmas 3.2 and 3.3, we immediately arrive at the following Theorem.
Theorem 3.4. Both the finite-dimensional Hamiltonian systems (3.5) and (3.10) are completely integrable systems inthe Liouville’s sense.
Hence, from the above procedure we obtain the following proposition.
Proposition 3.5. If (ϕ1, ϕ2) satisfies both Eqs. (3.5) and (3.10), then q = −〈∧ϕ1, ϕ1〉, r = −2 + 2α〈ϕ1, ϕ2〉 +
〈∧ϕ2, ϕ2〉 solve Eq. (2.10).
This implies that we have obtained an integrable decomposition of the whole soliton hierarchy (2.10).
4. Integrable couplings of the hierarchy (2.10)
4.1. Integrable couplings from two specific semidirect sums
In this section, we will construct integrable coupling systems through semidirect sums of Lie algebra associatedwith soliton equations (2.10).

L. Luo, E. Fan / Nonlinear Analysis 69 (2008) 3450–3461 3457
Let us first consider the semidirect sums of Lie algebra of 3 × 3 matrices (see [15] for further details)
G ⊕ Gc, G =
{(A 00 0
)∣∣∣∣ A ∈ C[λ, λ−1] ⊗ M2×2
},
Gc =
{(0 B0 0
)∣∣∣∣ B ∈ C[λ, λ−1] ⊗ M2×1
},
where C[λ, λ−1] ⊗ Mm×n = span{λk A | k ∈ Z, A ∈ Mm×n}. In this case, Gc is an ideal Lie subalgebra of G ⊕ Gc,
we define the corresponding enlarged spatial spectral matrix as
U = U (u, λ) =
(U Uα
0 0
)∈ G ⊕ Gc, Ua = Ua(s, λ) =
(s1λs2
), (4.1)
where s1 and s2 are two new dependent variables and
s = (s1, s2)T, u = (uT, sT)T
= (q, r, s1, s2)T. (4.2)
Upon setting
V =
(V Va0 0
), Va = Va(u, λ) =
(fg
), (4.3)
where V is a solution to Vx = [U, V ], defined by (2.2), the corresponding enlarged stationary zero curvature equationVx = [U , V ] becomes
Vax = U Va − V Ua, (4.4)
which is equivalent to
fx = λ2 f + αq f + λqg − s1a − λs2b,
gx = λr f − λ2g − αqg − s1c + λs2a.(4.5)
This system determines a solution for f, g as follows:
f =
∑j≥0
f jλ−2 j , g =
∑j≥0
g jλ−2 j−1. (4.6)
Now we define the the enlarged temporal spectral matrix as
V (m)=
(V (m) V (m)
α
0 0
), V (m)
a = (λ2m+2Va)+, m ≥ 0, (4.7)
where the V (m) is defined as in (2.9).Then, based on (4.5), we can compute that
V (m)ax − (U V (m)
a − V (m)Ua) =
(s1bm
λ(gmx + αqgm + s1cm)
), m ≥ 0. (4.8)
Therefore, the mth enlarged zero curvature equation
Utm = V (m)x − [U , V (m)
],
leads to
stm =
(s1s2
)tm
, Sm(u, s) =
(s1bm
gmx + αqgm + s1cm − s2bm
), m ≥ 0 (4.9)

3458 L. Luo, E. Fan / Nonlinear Analysis 69 (2008) 3450–3461
together with the mth soliton hierarchy in (2.10). Therefore, we obtain a hierarchy of coupling systems for thehierarchy (2.10)
utm =
(us
)tm
, Km(u) =
(Km(u)
Sm(u, s)
), m ≥ 0, (4.10)
where u = (uT, sT)T= (q, r, s1, s2)
T.Second, let us consider the semidirect sum of Lie algebra of 4 × 4 matrices as in [19,20]
G ⊕ Gc, G =
{(A 00 A
)∣∣∣∣ A ∈ C[λ, λ−1] ⊗ M2×2
},
Gc =
{(0 B0 0
)∣∣∣∣ B ∈ C[λ, λ−1] ⊗ M2×2
},
where C[λ, λ−1] ⊗ Mm×n = span{λk A | k ∈ Z, A ∈ Mm×n}. In this case, Gc is a ideal Lie subalgebra of G ⊕ Gc,
we define the corresponding enlarged spatial spectral matrix as
U = U (u, λ) =
(U Uα
0 U
)∈ G ⊕ Gc, Ua = Ua(s, λ) =
(s1 λs3λs2 −s1
), (4.11)
where s1, s2 and s2 are new dependent variables and
s = (s1, s2, s3)T, u = (uT, sT)T
= (q, r, s1, s2, s3)T.
If we set
V =
(V Vα
0 V
), Va = Va(u, λ) =
(f hg − f
), (4.12)
where V is a solution to Vx = [U, V ], defined by (2.2), then the corresponding enlarged stationary zero curvatureequation Vx = [U , V ] becomes
Vax = [U, Va] + [Ua, V ], (4.13)
which is equivalent to
fx = λqg + λs3c − λs2b − λrh,
hx = −2λq f + 2s1b − 2λs3a + 2λ2h + 2αqh,
gx = 2λr f + 2λs2a − 2s1c − 2λ2g − 2αqg.
(4.14)
This system can determine a solution for f, h, g as follows:
f =
∑j≥0
f jλ−2 j , h =
∑j≥0
h jλ−2 j−1, g =
∑j≥0
g jλ−2 j−1. (4.15)
Now we define the the enlarged temporal spectral matrix as
V (m)=
(V (m) V (m)
α
0 V (m)
), V (m)
a = (λ2m+2Va)+ + ∆m,a, m ≥ 0, (4.16)
where the V (m) is defined as in (2.9). Choose ∆m,a as
∆m,a =
(hm 00 −hm
), m ≥ 0.
Then, based on (4.14), we can compute that

L. Luo, E. Fan / Nonlinear Analysis 69 (2008) 3450–3461 3459
V (m)ax − [U, V (m)
a ] − [Ua, V (m)]
= (λ(2m+2)Va)+x + ∆m,ax − [U, (λ2m+2Va)+] − [U,∆m,a] − [Ua, V (m)]
=
(hmx λ(hmx − 2s1bm + 2s3bm)
λ(gmx + 2αqgm + 2s1cm − 2s2bm − rhm) −hmx
). (4.17)
Therefore, the mth enlarged zero curvature equation
Utm = V (m)x − [U , V (m)
],
leads to
stm =
s1s3s2
tm
, Tm(u, s) =
hmxhmx − 2s1bm + 2s3bm
gmx + 2αqgm + 2s1cm − 2s2bm − rhm
, m ≥ 0
(4.18)
together with the mth soliton hierarchy (2.10), we obtain a hierarchy of coupling systems for whole hierarchy (2.10)
utm =
(us
)tm
, Km(u) =
(Km(u)
Tm(u, s)
), m ≥ 0, (4.19)
where u = (uT, sT)T= (q, r, s1, s2, s3)
T.
4.2. Illustrative examples
We now work out two examples as follows, one in each of the two above cases. Let us first compute an example ofthe hierarchy (4.10). It directly follows from (4.5) that
f j x = f j+1 + αq f j + qg j − s1a j − s2b j ,
g j x = r f j+1 − g j+1 − αqg j − s1c j + s2a j+1,
where j ≥ 0. Here we can obtain that
f0 = 0, g0 = s2,
f1 = s1, g1 = −s2x − αqs2 −12
qrs2,
then the vector-valued function S1(u, s) defined by (4.9) becomes
S1(u, s) =
s1
(12
qx − αq2−
12
q2r
),(
−s2x − αqs2 −12
qrs2
)x
+ αq
(−s2x − αqs2 −
12
qrs2
)+s1
(−
12
rx − αqr −12
qr2)
− s2
(12
qx − αq2−
12
q2r
) .
Therefore, the integrable coupling of the generalized derivative nonlinear Schrodinger equation (2.21), defined by(4.10), reads as
qt1 =12
qxx − 2αqqx −12(q2r)x ,
rt1 = −12
rxx − 2α(qr)x −12(qr2)x ,
s1t1 = s1
(12
qx − αq2−
12
q2r
),
3460 L. Luo, E. Fan / Nonlinear Analysis 69 (2008) 3450–3461
s2t1 =
(−s2x − αqs2 −
12
qrs2
)x
+ αq
(−s2x − αqs2 −
12
qrs2
)+ s1
(−
12
rx − αqr −12
qr2)
− s2
(12
qx − αq2−
12
q2r
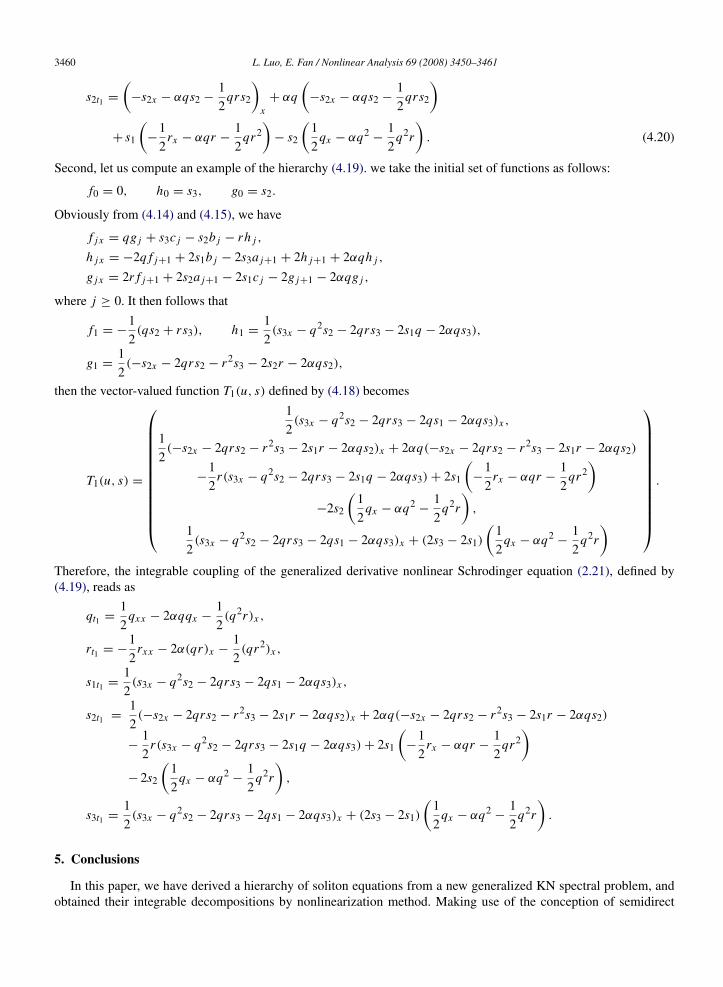
). (4.20)
Second, let us compute an example of the hierarchy (4.19). we take the initial set of functions as follows:
f0 = 0, h0 = s3, g0 = s2.
Obviously from (4.14) and (4.15), we have
f j x = qg j + s3c j − s2b j − rh j ,
h j x = −2q f j+1 + 2s1b j − 2s3a j+1 + 2h j+1 + 2αqh j ,
g j x = 2r f j+1 + 2s2a j+1 − 2s1c j − 2g j+1 − 2αqg j ,
where j ≥ 0. It then follows that
f1 = −12(qs2 + rs3), h1 =
12(s3x − q2s2 − 2qrs3 − 2s1q − 2αqs3),
g1 =12(−s2x − 2qrs2 − r2s3 − 2s2r − 2αqs2),
then the vector-valued function T1(u, s) defined by (4.18) becomes
T1(u, s) =
12(s3x − q2s2 − 2qrs3 − 2qs1 − 2αqs3)x ,
12(−s2x − 2qrs2 − r2s3 − 2s1r − 2αqs2)x + 2αq(−s2x − 2qrs2 − r2s3 − 2s1r − 2αqs2)
−12
r(s3x − q2s2 − 2qrs3 − 2s1q − 2αqs3) + 2s1
(−
12
rx − αqr −12
qr2)
−2s2
(12
qx − αq2−
12
q2r
),
12(s3x − q2s2 − 2qrs3 − 2qs1 − 2αqs3)x + (2s3 − 2s1)
(12
qx − αq2−
12
q2r
)
.
Therefore, the integrable coupling of the generalized derivative nonlinear Schrodinger equation (2.21), defined by(4.19), reads as
qt1 =12
qxx − 2αqqx −12(q2r)x ,
rt1 = −12
rxx − 2α(qr)x −12(qr2)x ,
s1t1 =12(s3x − q2s2 − 2qrs3 − 2qs1 − 2αqs3)x ,
s2t1 =12(−s2x − 2qrs2 − r2s3 − 2s1r − 2αqs2)x + 2αq(−s2x − 2qrs2 − r2s3 − 2s1r − 2αqs2)
−12
r(s3x − q2s2 − 2qrs3 − 2s1q − 2αqs3) + 2s1
(−
12
rx − αqr −12
qr2)
− 2s2
(12
qx − αq2−
12
q2r
),
s3t1 =12(s3x − q2s2 − 2qrs3 − 2qs1 − 2αqs3)x + (2s3 − 2s1)
(12
qx − αq2−
12
q2r
).
5. Conclusions
In this paper, we have derived a hierarchy of soliton equations from a new generalized KN spectral problem, andobtained their integrable decompositions by nonlinearization method. Making use of the conception of semidirect
L. Luo, E. Fan / Nonlinear Analysis 69 (2008) 3450–3461 3461
sums of Lie algebras, two specific integrable coupling systems are constructed. Thus, this kind of method providesa good source of the matrix spectral problem, and the study of integrable couplings using semidirect sums of Liealgebras will enhance our understanding of the classification of integrable systems.
Obviously, there are other questions worth further investigating for the resultant integrable coupling systems, suchas their Hamiltonian structure, nonlinearization, algebraic structure and so on. These investigations will be conductedin the future.
Acknowledgments
The authors would like to express their sincere thanks to Professor Ma Wen-Xiu for his enthusiastic guidanceduring his visit to Fudan University. This work was supported by grants from National Key Basic Research Project ofChina (2004CB318000) and the Research Project of Hubei Provincial Department of Education (D20082602).
References
[1] C.W. Cao, A cubic system which generates Bargmann potential and N -gap potential, Chinese Quart. J. Math. 3 (1988) 90–96.[2] C.W. Cao, Nonlinearization of the Lax system for AKNS hierarchy, Sci. China A 33 (1990) 528–536.[3] W.X. Ma, W. Strampp, An explicit symmetry constraint for the Lax pairs and the adjoint Lax pairs of AKNS systems, Phys. Lett. A 185
(1994) 277–286.[4] Y.B. Zeng, New factorization of the Kaup–Newell hierarchy, Physica D 73 (1994) 171–188.[5] W.X. Ma, R.G. Zhou, Adjoint symmetry constraints leading to binary nonlinearization, J. Nonlinear Math. Phys. 9 (2002) 106–126.[6] E.G. Fan, H.Q. Zhang, A hierarchy of nonlinear evolution equations,its bi-Hamiltonian structure, and finite-dimensional integrable systems,
J. Math. Phys. 41 (2000) 2058–2065.[7] Y.S. Li, W.X. Ma, Hamiltonian structures of binary higher-order constrained flows associated with two 3 × 3 spectral problems, Phys. Lett. A
272 (2000) 245–256.[8] Z.X. Zhou, Liouville integrability of the finite dimensional Hamiltonian systems derived from principal chiral field, J. Math. Phys. 43 (2002)
5002–5012.[9] R.G. Zhou, Lax representation, r -matrix method, and separation of variables for the Neumann-type restricted flow, J. Math. Phys. 39 (1998)
2848–2858.[10] X.X. Xu, A generalized Wadati Konno Ichikawa hierarchy and its binary nonlinearization by symmetry constraints, Chaos Solitons Fractals
15 (2003) 475–486.[11] X.X. Xu, Factorization of a hierarchy of the lattice soliton equations from a binary Bargmann symmetry constraint, Nonlinear Anal. 61 (2005)
1225–1240.[12] T.C. Xia, E.G. Fan, The multicomponent generalized Kaup–Newell hierarchy and its multicomponent integrable couplings system with two
arbitrary functions, J. Math. Phys. 46 (2005) 043510-8.[13] Z.J. Qiao, A new completely integrable Liouville’s system produced by the Kaup–Newell eigenvalue problem, J. Math. Phys. 34 (1993)
3110–3120.[14] D.J. Kaup, A.C. Newll, An exact solution for a derivative nonlinear Schrodinger equation, J. Math. Phys. 19 (1978) 798–801.[15] W.X. Ma, Enlarging spectral problems to construct integrable couplings of soliton equations, Phys. Lett. A 316 (2003) 72–76.[16] W.X. Ma, Y.F. Zhang, Semidirect sums of Lie algebras and discrete integrable couplings, J. Math. Phys. 47 (2006) 053501-16.[17] E.G. Fan, Y.F. Zhang, A simple method for generating integrable hierarchies with multi-potential functions, Chaos Solitons Fractals 25 (2005)
425–439.[18] Y.F. Zhang, E.G. Fan, An approach for generating enlarging integrable systems, Phys. Lett. A 365 (2007) 89–96.[19] W.X. Ma, X.X. Xu, Y.F. Zhang, Semidirect sums of Lie algebras and continuous integrable couplings, Phys. Lett. A 351 (2006) 125–130.[20] W.X. Ma, X.X. Xu, Y.F. Zhang, Semidirect sums of Lie algebras and discrete integrable couplings, J. Math. Phys. 47 (2006) 053501-16.[21] H.X. Yang, X.X. Xu, Y.P. Sun, H.Y. Ding, Integrable relativistic Toda type lattice hierarchies associated coupling systems and the Darboux
transformation, J. Phys. A: Math. Gen. 39 (2006) 3933–3947.[22] Y.P. Sun, D.Y. Chen, X.X. Xu, Positice and negative hierarchy of nonlinear integrable lattice models and three integrable coupling systems
associated with a discrete spectral problem, Nonlinear Anal. 64 (2006) 2604–2618.[23] W.X. Ma, M. Chen, Hamiltonian and quasi-Hamiltonian structures associated with semidirect sums of Lie algebras, J. Phys. A: Math. Gen.
39 (2006) 10787–10801.[24] W.X. Ma, A discrete variational identity on semidirect sums of Lie algebras, 2007. Preprint.[25] M.A. Olshanetsky, A.M. Perelomov, Classical integrable finite-dimensional systems related to Lie algebras, Phys. Rep. 71 (1981) 313–400.[26] G.Z. Tu, The trace identity, a powerful tool for constructing the Hamiltonian structure of integrable systems, J. Math. Phys. 30 (1989) 330–338.