inertia mass damper and its...
TRANSCRIPT

Inertia Mass Damper and its application
Katsuaki Sunakoda1 and Issei Yamazaki2
1 Akita University, Akita, Japan
2Research and Development, Sanwa Tekki Corporation, Tochigi, Japan
The Seventh Kwang-Hua Forum December 9-11, 2016, Shanghai

Summary1) Historical Background of I.M.D.
2) Mechanical Model of I.M.D. & E.I.M.D. (Dynamic stiffness, Negative stiffness.)
3) Dynamic response of the system with I.M.D. & E.I.M.D. (Two degree of freedom system and
simulation, Frequency Response).
4) Introduction of experimental test in NCREE (The outline of E.I.M.D of 30kN , Three story structure seismic test analytical model, Frequency response spectrum, Seismic Excitation Response .

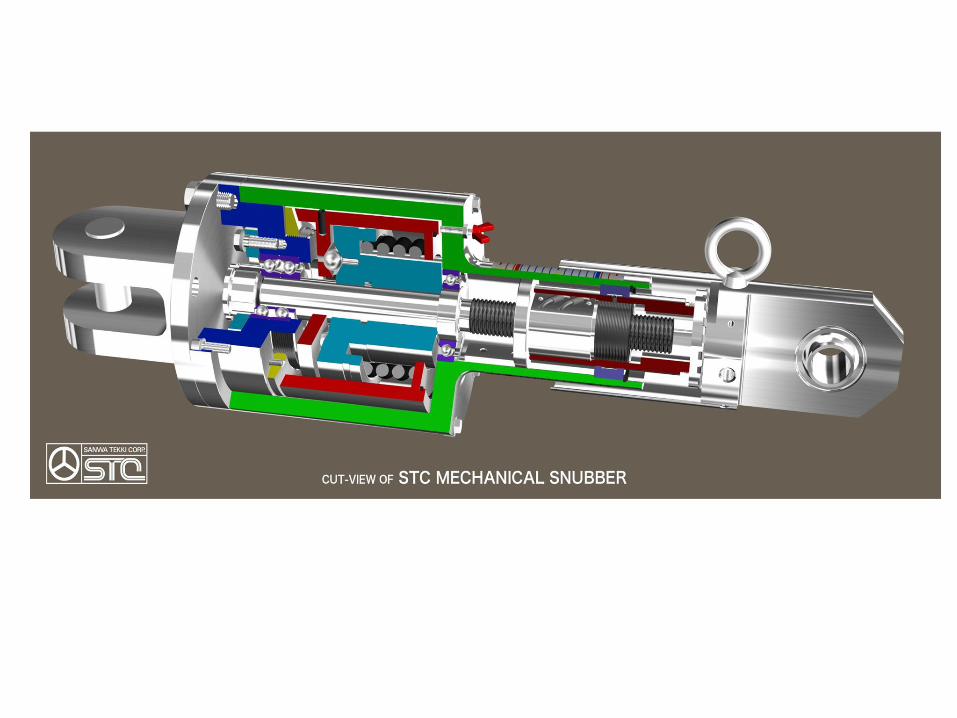
1: Ear2: Ball nut3: Ball screw4: Angular bearing
5: Case6:Flywheel7: Key and keyway8: Piston
Primitive I.M.D
Detail of ball nut

x Ball screw, the relationship displacement and angle
Mechanical model of I.M.D. and E.I.M.D.
2lx
22
21
21 xmI'T
Kinetic energy expressed as,
Where I: moment of inertia of rotating part , m: straight movement parts. consist of ball nut, load column, cover and ear, but second term is usually negligible small compared with first term of right hand side.
22
21
21 xmIT e
Introduction of the idea of equivalent mass
Il
Ix
me22
2
Equivalent mass can be expressed as
Detail of ball nut

Spring rate and damping coefficient Spring rate : determined by testing Damping : determined by testing
Mechanical model of I.M.D. & E.I.M.D.
Il
me
2
24I: Rotating inertia moment
x2x1
ce
ke
x2 x1
ce
keme
ce
me
x1
x2
F
x1
F
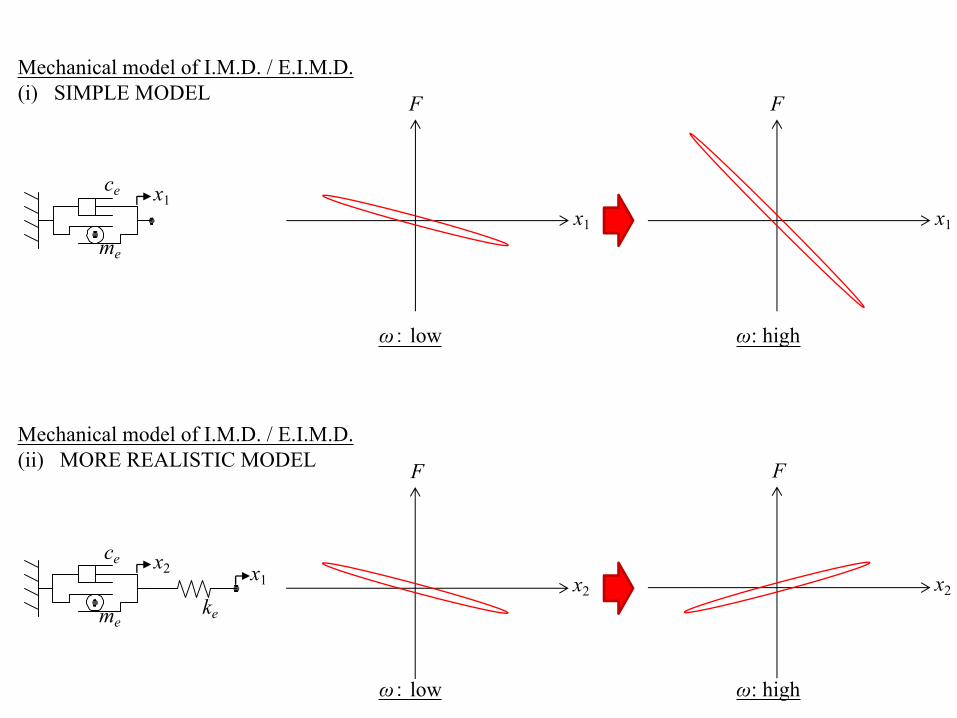
Mechanical model of I.M.D. / E.I.M.D.(ii) MORE REALISTIC MODEL
Mechanical model of I.M.D. / E.I.M.D.(i) SIMPLE MODEL
x1
F
x2
F
ω: low ω: high
ω: low ω: high

tax sin1
0)( 1222 xxkxcxm eee
Dynamic Stiffness
12 xxx
222
222
11
)()()()(
eee
eee
e
cmkcmk
xxk
xFK

ek

DYNAMIC RESPONSE OF THE SYSTEM WITH I.M.D. or E.I.M.D.
ce me
ke
mck
x0x2
x1
022
011
xxXxxX

022011
021111
1222
,where
)(
0)(
xxXxxX
xmXXkkXXcXm
XXkXcXm
e
eee
0
iii xQ
xU
xT
dtd
221
221 )(
21)(
21 xxkxxkU e
201
202 )(
21)(
21 xxcxxcQ e
122
02 21)(
21 xmxxmT e

mass main of frequency angular natural :/
I.M.D. of frequency angular natural:/
mk
mk
x
eee
2/1
2
22
2
2
2
222 411
2 e
xe
e
xe
e
xe
mm
mm
012224
e
x
e
e
e
x
e mm
2/1
22
2
2
2
2
2
2
2
2
0
1
141
ee
xe
x
e
eee
e
x
e
e
hmmh
mm
mm
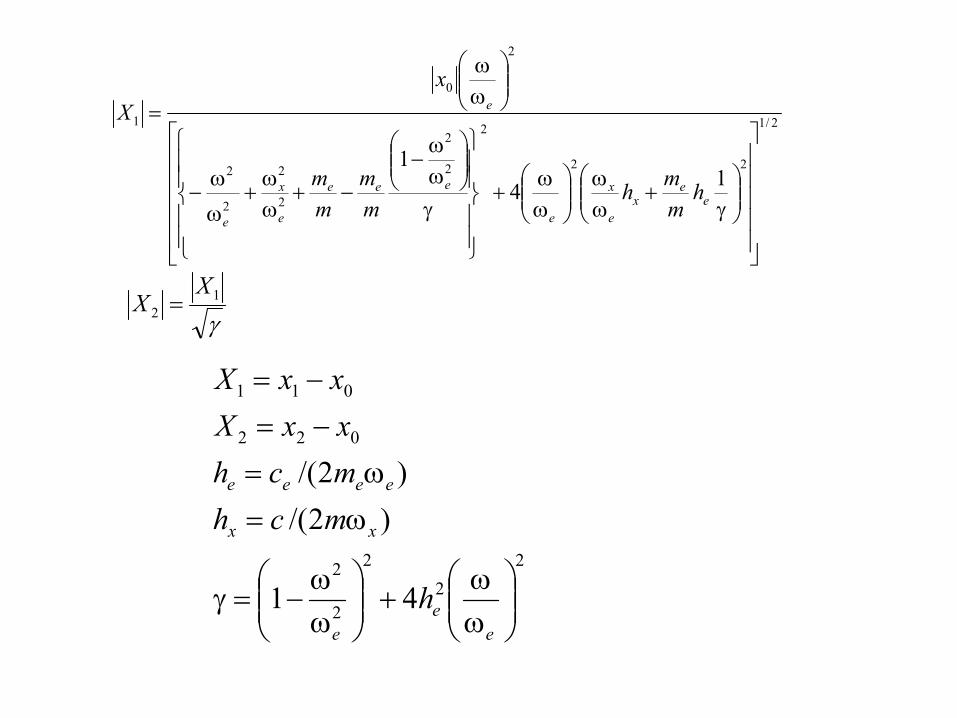
xX
1
2
XX
22
2
2
2
022
011
41
)2/()2/(
ee
e
xx
eeee
h
mchmchxxXxxX

★Parameter of beamm [kg] = 100k [N/m] = 86,672h = 0.01
★Parameter of I.M.D.me [kg] = 1500ke [N/m]= 3,500,000he = 0.005
★Natural frequency of I.M.D.
= 7.688
★Natural frequency of single beam
= 4.686
★Primary and secondary natural frequency of beam + I.M.D. = 1.159 = 31.0085
★Natural frequency of beam + spring
= 30.142
e
ee m
kπ
f21[Hz]
mk
πf
21 [Hz] nth
mkk
πf e
21 [Hz] spr
[Hz] 1f[Hz] 2f

★Parameter of beamm [kg] = 500k [N/m] = 693.42h = 0.01
★Parameter of I.M.D.me [kg] = 1500ke [N/m]= 3,500,000he = 0.005
★Natural frequency of I.M.D.
= 7.688
★Natural frequency of single beam
= 0.187
★Primary and secondary natural frequency of beam + I.M.D. = 0.094 = 15.377
★Natural frequency of beam + spring
= 13.317
e
ee m
kπ
f21[Hz]
mk
πf
21 [Hz] nth
mkk
πf e
21 [Hz] spr
[Hz] 1f[Hz] 2f

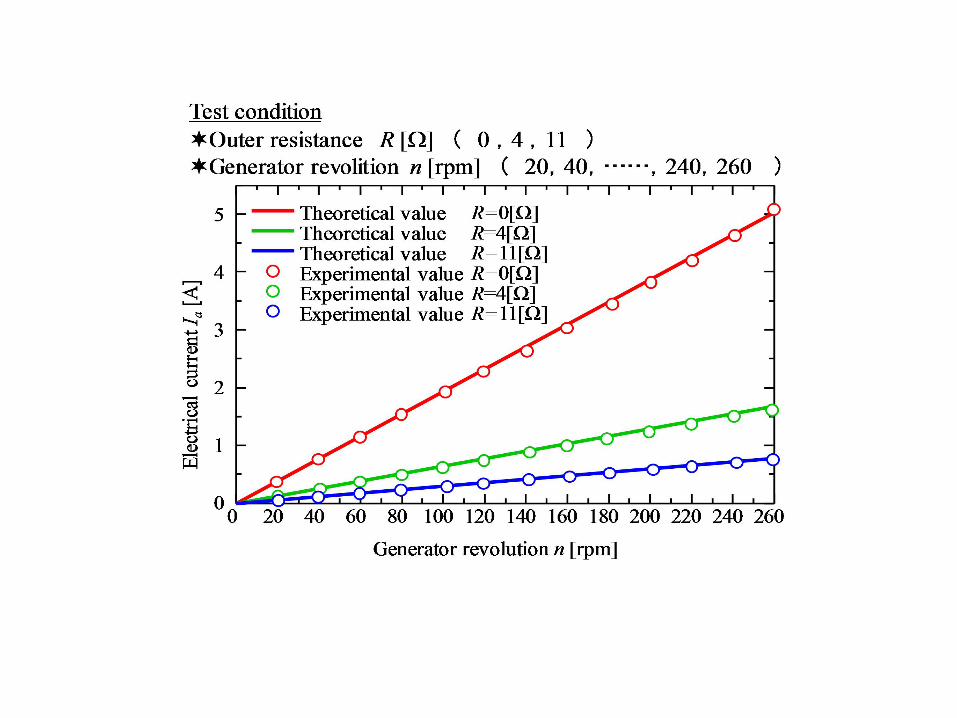
ra
TEgfs Fuu
RRKK
Lα
ηuIαII
LηF sign2121 2
22
whereF: total resistance forceη: rotating conversion efficiency of ballscrew & nut(≈0.9 to 1)L: lead of ball screwIs: moment of inertia of ball screwIf: moment of inertia of rotating flywheelIg: moment of inertia of rotating shaft of generatorα: increasing speed ratioKE: electromotive force constantKT: torque constantRa: internal resistance of generatorR: outer electrical resistanceFr: experimental friction force
INTRODUCTION OF EXPERIMENTAL STUDY IN NCREE
E.I.M.D.

Inertia mass 12000 [kg],Resistance (open circuit) []
Amp.3[mm]
Amp.6[mm]
-6 -3 0 3 6-20000
-10000
0
10000
20000R=[]Exp.
0.3Hz0.5Hz1.0Hz1.5Hz2.0Hz2.5Hz
-6 -3 0 3 6-20000
-10000
0
10000
20000R=[]Cal.
-6 -3 0 3 6-20000
-10000
0
10000
20000R=[]Exp.
0.3Hz0.5Hz1.0Hz1.5Hz2.0Hz
-6 -3 0 3 6-20000
-10000
0
10000
20000R=[]Cal.
Displacement x [mm]
Forc
e F
[N]
Displacement x [mm]
Forc
e F
[N]
Displacement x [mm]
Forc
e F
[N]
Displacement x [mm]
Forc
e F
[N]
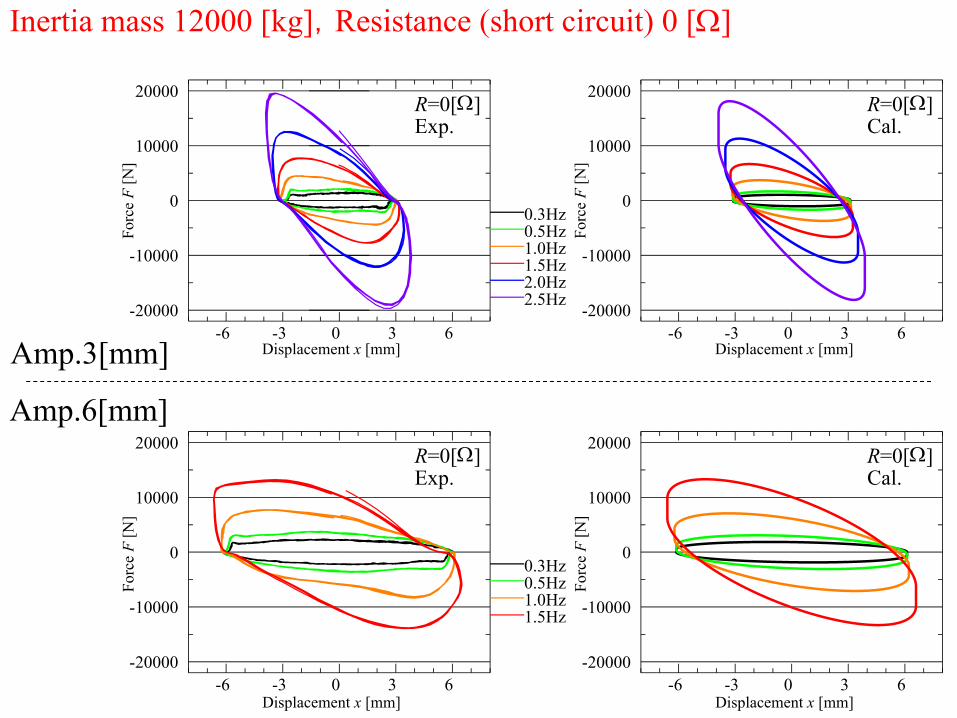
Inertia mass 12000 [kg],Resistance (short circuit) 0 []
Amp.3[mm]
Amp.6[mm]
-6 -3 0 3 6-20000
-10000
0
10000
20000R=0[]Exp.
0.3Hz0.5Hz1.0Hz1.5Hz2.0Hz2.5Hz
-6 -3 0 3 6-20000
-10000
0
10000
20000R=0[]Cal.
-6 -3 0 3 6-20000
-10000
0
10000
20000R=0[]Exp.
0.3Hz0.5Hz1.0Hz1.5Hz
-6 -3 0 3 6-20000
-10000
0
10000
20000R=0[]Cal.
Displacement x [mm]
Forc
e F
[N]
Displacement x [mm]
Forc
e F
[N]
Displacement x [mm]
Forc
e F
[N]
Displacement x [mm]
Forc
e F
[N]
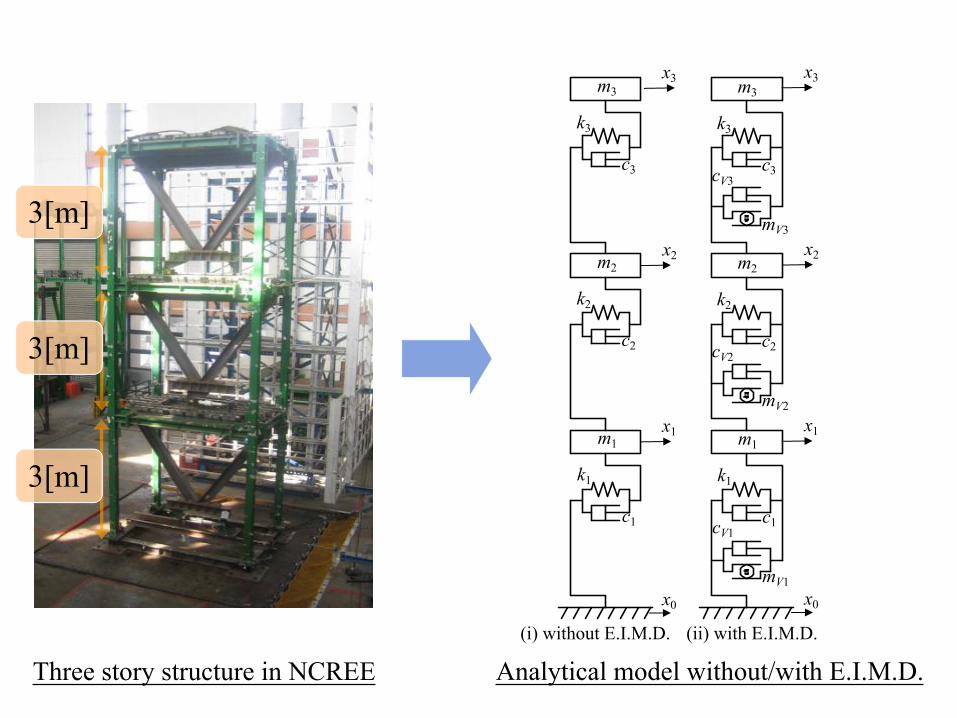
Three story structure in NCREE
3[m]
3[m]
3[m]
Analytical model without/with E.I.M.D.(i) without E.I.M.D. (ii) with E.I.M.D.
cV1
mV1
m1
k1
c1
x1
x0
cV2
mV2
m2
k2
c2
cV3
mV3
m3
k3
c3
m1
k1
c1
m2
k2
c2
m3
k3
c3
x2
x3
x1
x0
x2
x3

Mass [kg]m1 6000m2 6000m3 6000
Damping coefficient [Ns/m]c1 0.988×104
c2 1.712×104
c3 1.084×104
Stiffness [N/m]k1 1.211×106
k2 1.148×106
k3 1.366×106
Inertia mass [kg]mV1 6000 or 12000mV2 6000 or 12000mV3 6000 or 12000
Damping coefficient [Ns/m]cV1 0 or 1.000×105
cV2 0 or 1.000×105
cV3 0 or 1.000×105
Indentified parameters of three story structure
Parameters of E.I.M.D.
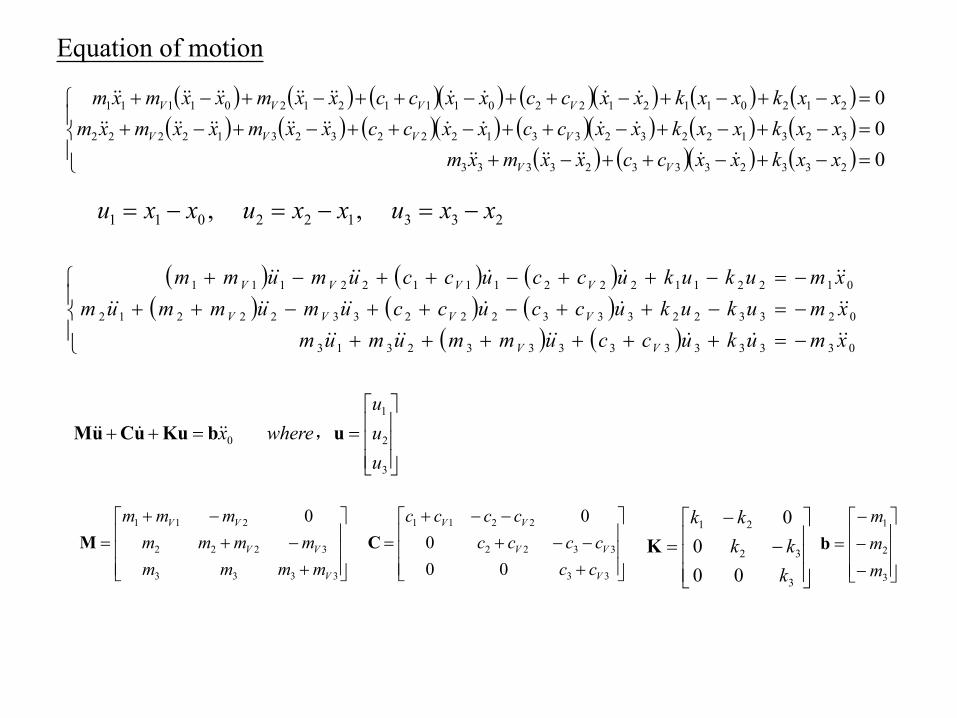
000
233233323333
3231223233122232312222
2120112122011121201111
xxkxxccxxmxmxxkxxkxxccxxccxxmxxmxmxxkxxkxxccxxccxxmxxmxm
VV
VVVV
VVVV
233122011 ,, xxuxxuxxu
03333333332313
0233223332223322212
01221122211122111
xmukuccummumumxmukukuccuccumummumxmukukuccuccumumm
VV
VVVV
VVVV
3
2
1
0
uuu
wherex ubKuuCuM ,
3333
3222
211 0
V
VV
VV
mmmmmmmm
mmmM
33
3322
2211
000
0
V
VV
VV
cccccc
ccccC
3
32
21
000
0
kkk
kkK
3
2
1
mmm
b
Equation of motion
tm
tm
tm
UU
UU
UU
j33
j22
j11
e
e
e
3
2
1
0
UUU
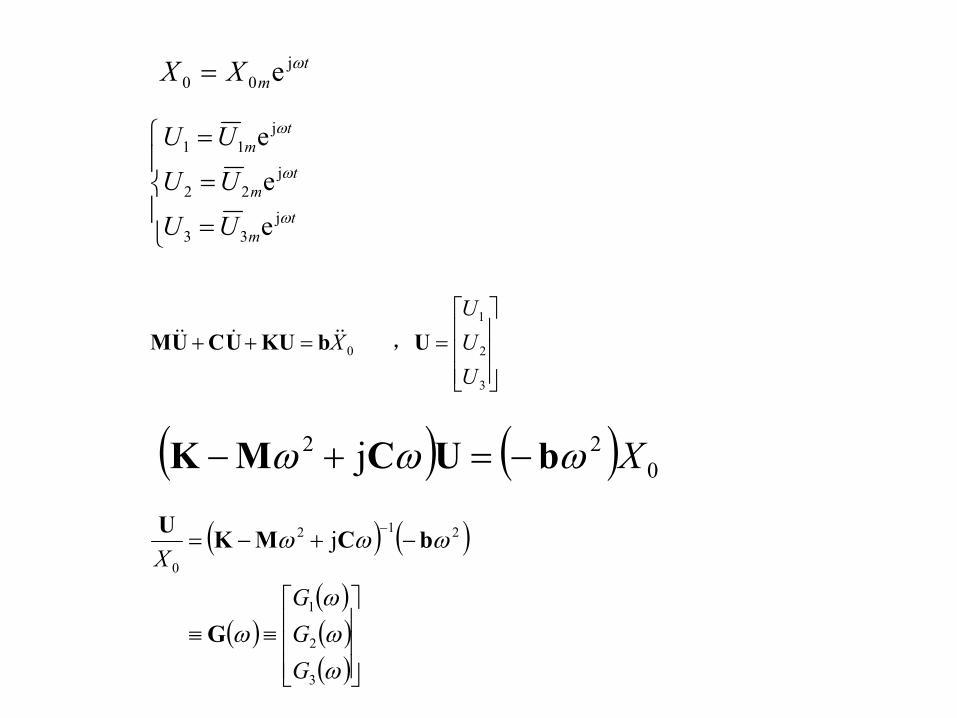
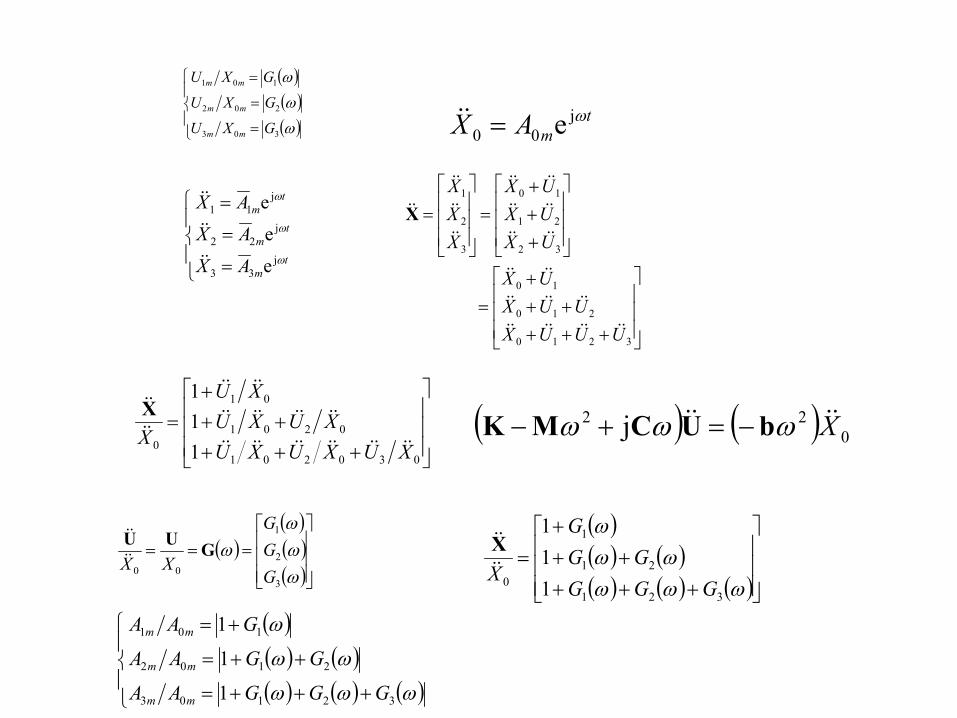
X UbKUUCUM ,
022 j X bUCMK
3
2
1
212
0
j
GGG
X
G
bCMKU
tmXX j
00 e
303
202
101
GXU
GXU
GXU
mm
mm
mm
tmAX j
00 e
tm
tm
tm
AXAXAX
j33
j22
j11
e
e
e
3210
210
10
32
21
10
3
2
1
UUUXUUX
UX
UXUXUX
XXX
X
030201
0201
01
0 111
XUXUXUXUXU
XU
X
X 0
22 j X bUCMK
3
2
1
00 GGG
XXGUU
321
21
1
0 111
GGGGG
G
XX
32103
2102
101
1
1
1
GGGAA
GGAA
GAA
mm
mm
mm
0.001
0.01
0.1
1
10
WithoutWith_1With_2With_1DWith_2D
8.218917.451166.802821.463331.42808
91% 83%18%17%
A1m
/A0m
コピー領域の設定L: 10T: 7.5R: 150B: 220100%チェックなし
0.1 1 10 1000.001
0.01
0.1
1
10
WithoutWith_1With_2With_1DWith_2D
18.056616.210915.06112.148082.04201
12%11% 90% 83%
A3m
/A0m
f [Hz]
0.001
0.01
0.1
1
10
WithoutWith_1With_2With_1DWith_2D
14.934313.455312.55231.902631.82419
90% 84%13%12%
A2m
/A0m
0.01
0.1
1
10 WithoutWith_1With_2With_1DWith_2D 8.21891
7.451166.802821.463331.42808
91% 83%18%17%
U1m
/X0m
コピー領域の設定L: 10T: 7.5R: 150B: 220100%チェックなし
0.1 1 10 1000.01
0.1
1
10 WithoutWith_1With_2With_1DWith_2D 18.0566
16.210915.06112.148082.04201
12%11% 90% 83%U
3m/X
0m
f [Hz]
0.01
0.1
1
10 WithoutWith_1With_2With_1DWith_2D 14.9343
13.455312.55231.902631.82419
90% 84%13%12%
U2m
/X0m
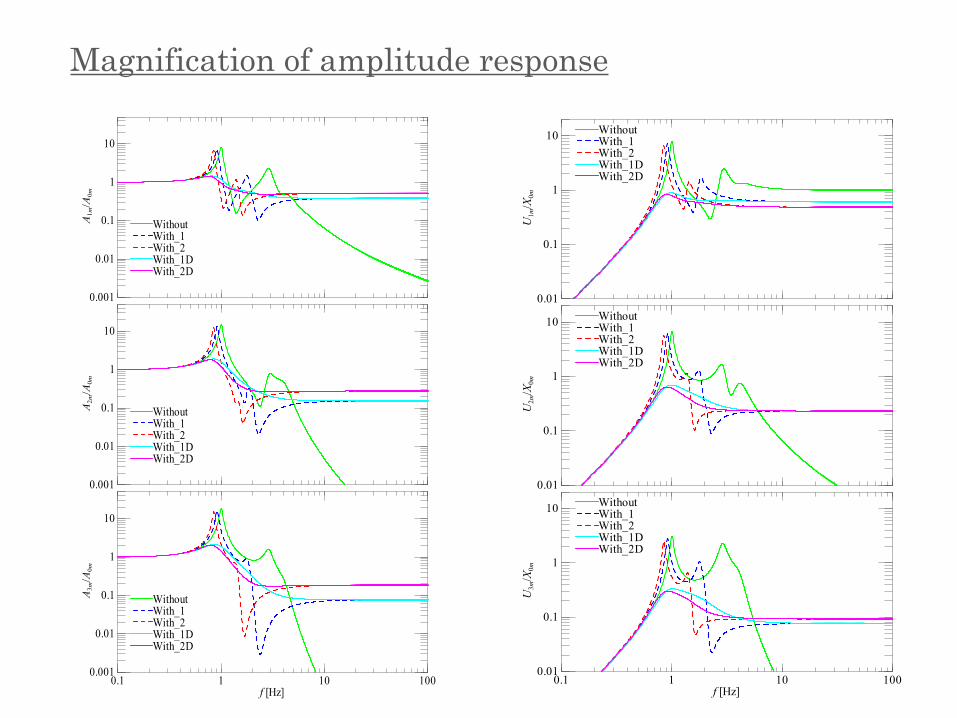
Magnification of amplitude response
• Without: structure without E.I.M.D • With_1: structure+ mass ratio* 1+damping zero* of E.I.M.D • With_2: structure+ mass ratio 2+damping zero of E.I.M.D. • With_1D: structure+ mass ratio 1+ damping max*. of E.I.M.D • With_2D: structure+ mass ratio 2+ damping max. of E.I.M.D
Test conditions
*: where, mass ratio means (inertia mass)/(structure mass of each story), and damping zero and max (1.000×105 Ns/m ) mean in case of terminal resistance is infinity and short-circuit, respectively.
-4
0
4
x 0 [m
/s2 ]
:
コピー領域の設定L: 7.5T: 5R: 147.5B: 217.5100%チェックなし
-4
0
4
x 1 [m
/s2 ]
:
-4
0
4
x 2 [m
/s2 ]
:
-4
0
4
x 3 [m
/s2 ]
:
-30
0
30
u 1 [m
m]
-30
0
30
u 2 [m
m]
0 10 20 30 40-30
0
30
u 3 [m
m]
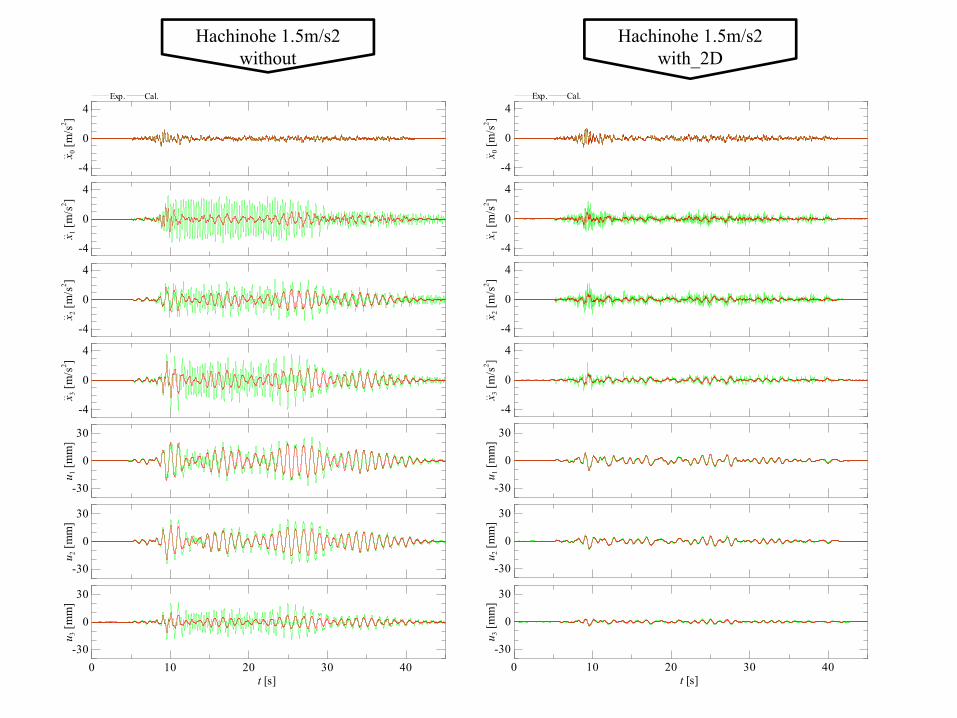
Exp. Cal.
t [s]
-4
0
4
x 0 [m
/s2 ]
:
コピー領域の設定L: 7.5T: 5R: 147.5B: 217.5100%チェックなし
-4
0
4
x 1 [m
/s2 ]
:
-4
0
4
x 2 [m
/s2 ]
:
-4
0
4
x 3 [m
/s2 ]
:
-30
0
30
u 1 [m
m]
-30
0
30
u 2 [m
m]
0 10 20 30 40-30
0
30
u 3 [m
m]
Exp. Cal.
t [s]
Hachinohe 1.5m/s2without
Hachinohe 1.5m/s2with_2D
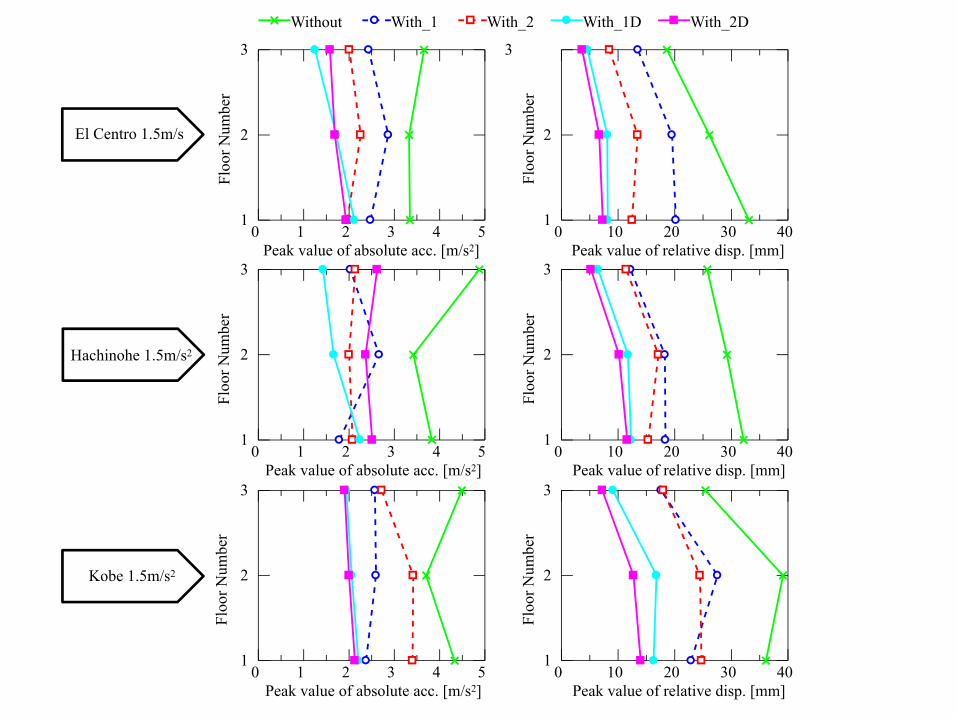
El Centro 1.5m/s
0 1 2 3 4 51
2
3
Floo
r Num
ber
Peak value of absolute acc. [m/s2]
Without With_1 With_2 With_1D With_2D
Hachinohe 1.5m/s2
0 10 20 30 401
2
3
Floo
r Num
ber
Peak value of relative disp. [mm]
Kobe 1.5m/s2
0 1 2 3 4 51
2
3
Peak value of absolute acc. [m/s2]
Floo
r Num
ber
0 1 2 3 4 51
2
3
Peak value of absolute acc. [m/s2]
Floo
r Num
ber
0 10 20 30 401
2
3
Peak value of relative disp. [mm]
Floo
r Num
ber
0 10 20 30 401
2
3
Peak value of relative disp. [mm]
Floo
r Num
ber

Thank you !