indoorgml–candidate standard for indoor spatial … · layer “wifi ” room 1 room 2 room ......
TRANSCRIPT

®
Sponsored by
IndoorGML – Candidate Standard for Indoor Spatial Information
90th OGC Technical CommitteeWashington, DC
Ki-Joune Li26 March 2014

OGC®
Before starting…
• Not (InDoorGML, Indoor GML, In Door GML)• the correct name is IndoorGML like CityGML
2

OGC®3
Not very usefulNot very useful
Tag for indoor space
Tag for indoor space
<Source: Google Earth 3D>
OGC®4
????
<Source: Google Earth 3D>

OGC®
Applications
5
Indoor Geo-PortalIndoor LBS
Indoor mCommerceEmergency Control
Services for handicapped persons
Indoor Robot
Cruise ShipHospital

OGC®
Prior work on indoor space
• IFC: Mainly focused on BIM• CityGML: LoD 4: Interior space• KML• others
6
OGC®
Basic Ideas
7
Spacea boundless extent in which objects and events occur and have position – in online Britannica
空 間
Emptiness In-Between

OGC®
8
Basic Ideas – Components vs. Space

OGC®
IndoorGML as a complement
CityGMLCityGML
KMLKML IFCIFC
IndoorGML
1. Cellular Space2. Network and3. Multi-Layered
Space Model
IndoorGML
1. Cellular Space2. Network and3. Multi-Layered
Space Model
Indoor positioning is out of scope9

OGC®
IndoorGML and Other Standards
IFC
KML
CityGML
2D Indoor Floor Plan
IndoorGMLIndoor LBS
Indoor RobotIndoor mCommerce
Services for handicapped
persons
Emergency ControlApplication
10
OGC®
IndoorGML based on Cellular Space Model
•
11

OGC®
nroom
gml::id=001
`
Option 2: Geometry in IndoorGML
Option 3: No Geometry
CityGML data
IndoorGML data
GM_Solid (or GM_Surface)
Option 1: External
Reference to room in CityGML
Three options to represent geometry of each cell
12
Geometry
OGC®
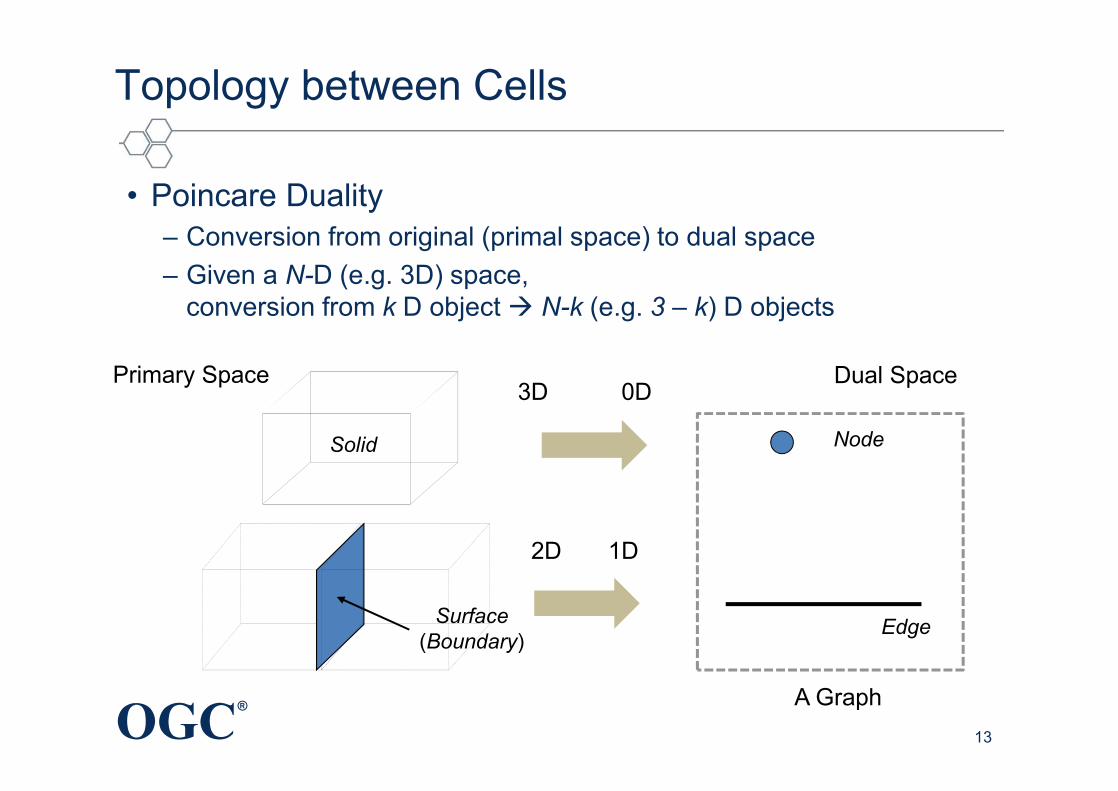
• Poincare Duality– Conversion from original (primal space) to dual space– Given a N-D (e.g. 3D) space,
conversion from k D object à N-k (e.g. 3 – k) D objects
Dual Space3D 0D
2D 1D
Solid Node
Surface(Boundary)
Edge
13
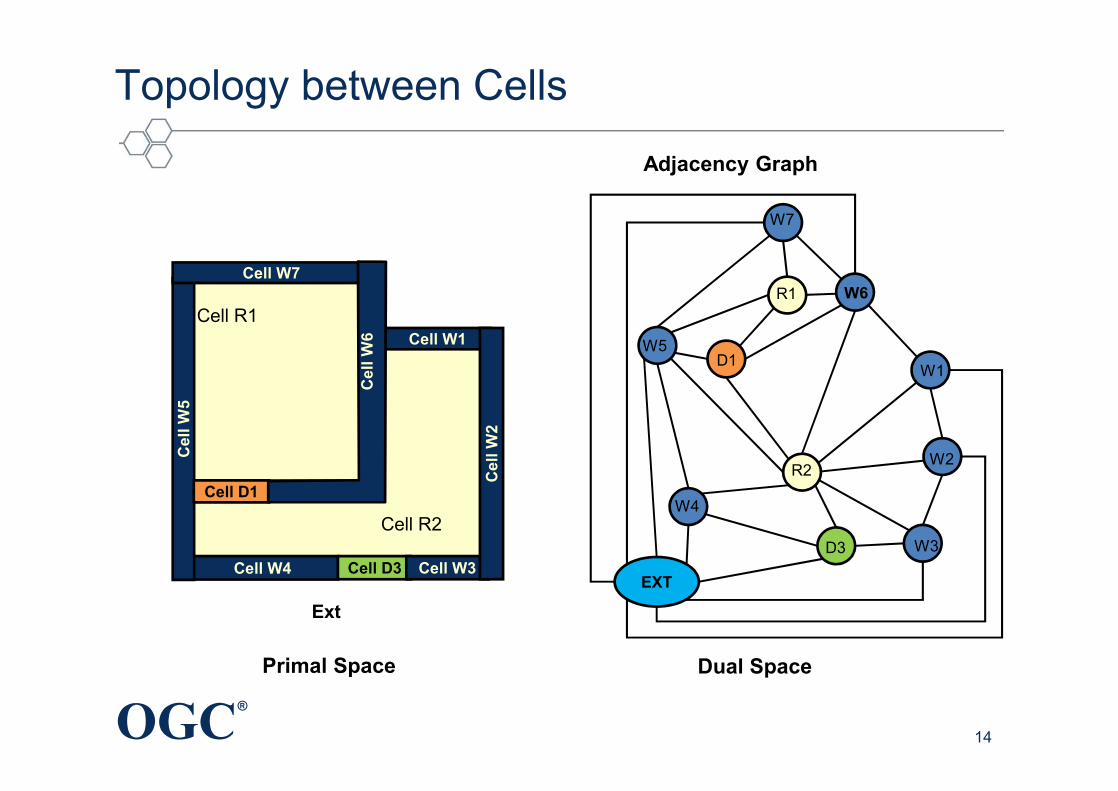
Topology between Cells
A Graph
Primary Space
OGC®
Cell R2
Cell R1
Cell W4
Cel
l W5
Cell W1
Cell D3
Cell D1
R1
R2
D1
D3
W1
W2
W3
W4
W5
W6
W7
Primal Space Dual Space
EXT
Ext
Cell W7
Cell W3
Cel
l W2
Cel
l W6
Adjacency Graph
14
Topology between Cells

OGC®
R1
R2
D1
D3
W1
W2
W3
W4
W5
W6
W7
EXT
Connectivity Graph
15
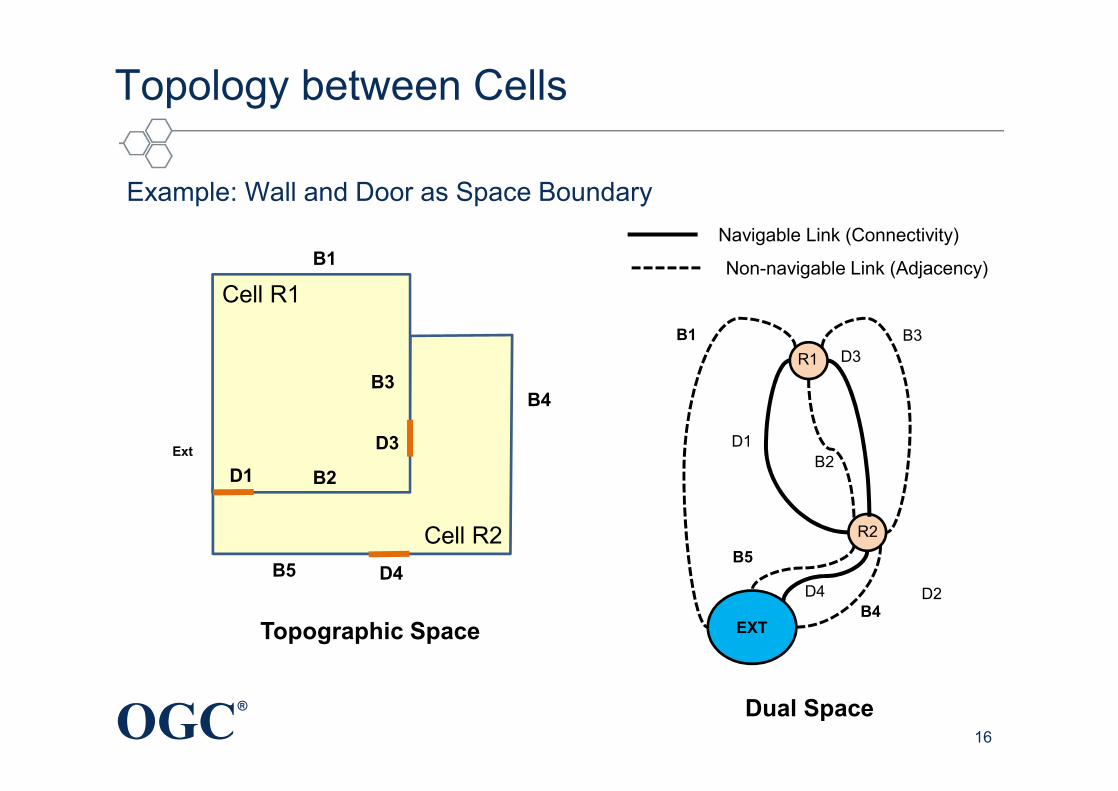
Topology between Cells
OGC®
Example: Wall and Door as Space Boundary
Cell R2
Cell R1
R1
R2
EXTTopographic Space
B1
D1D3
D4
B2
B3B4
B5
Ext D1
D3
D4 D2
B2
B3B1
B5
B4
Non-navigable Link (Adjacency)
Navigable Link (Connectivity)
Dual Space16
Topology between Cells
OGC®
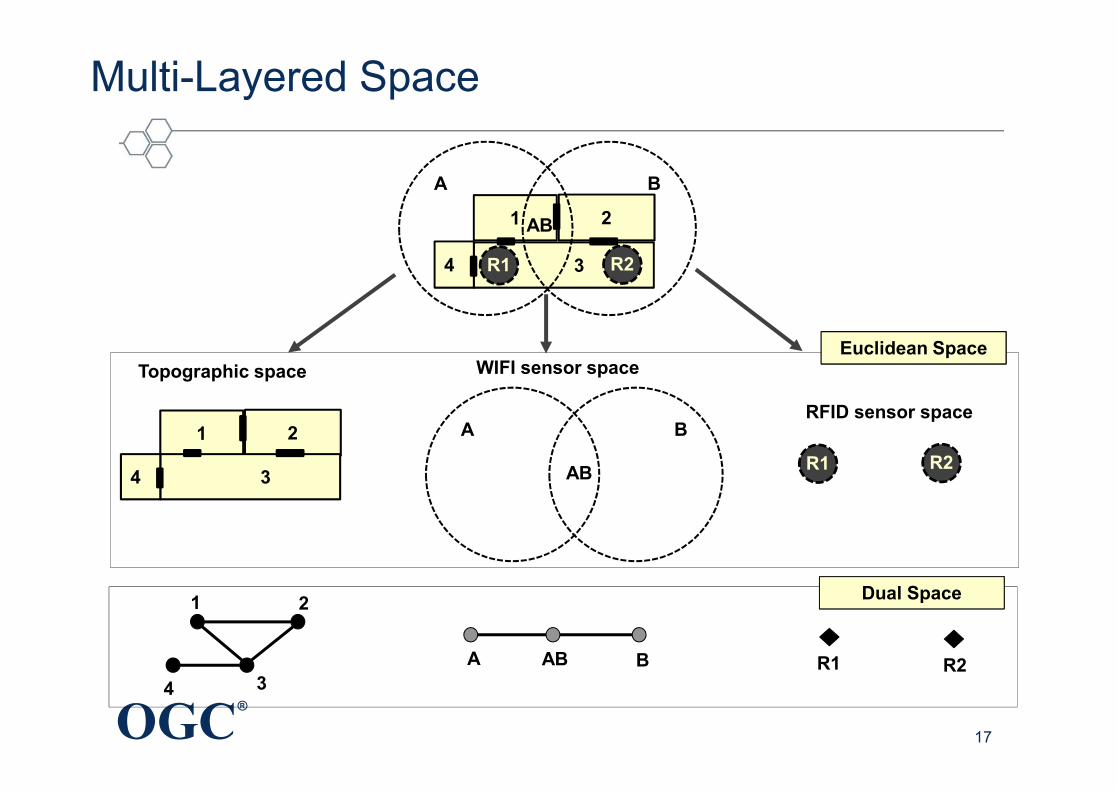
1 2
34
A B
AB R2R1
Topographic space WIFI sensor space
RFID sensor space
1 2
34
A B
AB
R2R1
1 2
34A AB B R1 R2
Euclidean SpaceEuclidean Space
Dual SpaceDual Space
Multi-Layered Space
17

OGC®
Multi-Layered Space – Inter-layer relation
A
1 2
34
AB B
R1 R2
Inter-layer relation, denotes intersecting cells between different space layers
Connectivity(Intra-layer relation) denotes adjacent cells within the same space model
1 2
34
A AB B
R1 R2
Topographic space
WFI sensor space
RFID sensor space
18

OGC®
Example – Multi-Layered Space
Non-Navigable SpaceStair
Room 1 Room 2
Room 3
Room 1 Room 2
Room 3bRoom 3a
WiFi A WiFi B
WiFi AB
19

OGC®
Example – Multi-Layered Space
Geometry in IR³ Topology
Layer “Walkable”
Layer “Wheelchair”
Layer “WiFi”
Room 1 Room 2
Room 3bRoom 3a
Outer
Room 1 Room 2
Room 3
Outer
WiFi A WiFi AB
WiFi BOuter
20
OGC®
Semantics
§ Semantic Interpretation of Indoor Space• Classification of Indoor Space• Example – Room, Door, Corridor, Stair Space, Elevator Shaft, Gate
§ Definition of Attributes• Names, Usage, Functions, etc..• Directions• Accessibility
21

OGC®
<<Feature>>IndoorNavi::NavigableBoundary
<<Feature>>IndoorCore::CellBoundary
<<Feature>>IndoorCore::CellSpace
<<Feature>>IndoorNavi::
TransferSpace
<<Feature>>IndoorNavi::
ConnectionSpace
<<Feature>>IndoorNavi::AnchorSpace
<<Feature>>IndoorNavi::
GeneralSpace
<<Feature>>IndoorNavi::NavigableSpace
<<Feature>>IndoorNavi::
TransitionSpace
0..1 0..*
boundedby
<<Feature>>IndoorNavi::
TransferBoundary
<<Feature>>IndoorNavi::
AnchorBoundary
<<Feature>>IndoorNavi::
ConnectionBoundary
<<Feature>>IndoorNavi::NonNavigableBoundary
<<Feature>>IndoorNavi::NonNavigableSpace
22
Semantic Extension for Navigation

OGC®
Indoor Navigation Module – Anchor Node
Ground Transportation Network
Anchor Node
IndoorGML (Connectivity NRG)
Reference node in ground transportation network
Bidirectional external references
Anchor Node also contains- Conversion Parameters
• rotation origin point (x0, y0, z0) • rotation angles (α, β, γ, along x, y, and z-axis), • rescaling factor (sx, sy, sz), and • translation vector (tx, ty, tz)
- Other attributes• URL of fingerprint map• Address
Anchor Node also contains- Conversion Parameters
• rotation origin point (x0, y0, z0) • rotation angles (α, β, γ, along x, y, and z-axis), • rescaling factor (sx, sy, sz), and • translation vector (tx, ty, tz)
- Other attributes• URL of fingerprint map• Address
23

OGC®
Core Module
Basic Components of IndoorGML
IndoorGMLIndoorGML
Connectivity GraphConnectivity Graph
Multi-Layered Space ModelMulti-Layered Space Model
Cellular Space ModelCellular Space Model
Extension Module
Indoor Navigation Module (1.0)Indoor Navigation Module (1.0) FM Module?FM Module? Multimedia Module?Multimedia Module?
Indoor POI?Indoor POI? Robotics Module ?Robotics Module ?
Maybe in IndoorGML 2.0 ?
GML 3.2GML 3.2 ISO 19107ISO 19107
24

OGC®
Semantic Extension – Future Plan
IndoorGML core
Geography Markup Language
<<import>>
<<XSDschema>>
<<ApplicationSchema>>
IndoorNavigation<<Leaf>>
<<import>>
IndoorGML 1.0
Semantic Extension
Indoor Facility Management ?<<Leaf>>
Indoor Robotics ?<<Leaf>>
IndoorGML 2.0
25

OGC®
Use-Case – Venue Map Service (COEX, Seoul)
26

OGC®
27
Use-Case – Venue Map Service (COEX, Seoul)

OGC®
28
Use-Case – Venue Map Service (COEX, Seoul)

OGC®
29
Use-Case – Venue Map Service (COEX, Seoul)
OGC®
Demands from other standards
• ISO/TC204 WG 17 (Nomadic Devices of ITS Systems)– Extension of road navigation standards for covering outdoor space
AND Indoor Space in a seamless way– NWIP: Adopted on May 7, 2012 (ISO 17438-1) – Part I
• IEEE RAS(Robotics and Automation Society)– Indoor maps for localization and navigation of robots– IEEE MDR (Map Data Representation for Robots)
• WG established in Nov. 2011• To be published in 2014
30

OGC®
Useful Links
• indoorgml.net
31