indoor localization and navigation for pervasive and sensor-based computing environment
DESCRIPTION
Indoor Localization and Navigation for Pervasive and Sensor-Based Computing Environment. Widyawan. Electrical Engineering and Information Technology Department Gadjah Mada University. Agenda. Vision of Pervasive Computing Indoor Localization Fingerprinting-based Indoor Localization - PowerPoint PPT PresentationTRANSCRIPT

INDOOR LOCALIZATION AND NAVIGATION FOR PERVASIVE AND SENSOR-BASED COMPUTING ENVIRONMENT
Widyawan
Electrical Engineering and Information Technology Department Gadjah Mada University
AGENDA
Vision of Pervasive Computing Indoor Localization Fingerprinting-based Indoor Localization Particle Filter algorithm Pedestrian Dead Reckoning Challenges Remain
OLD PARADIGM
For over forty years, computation has centered about machines, not people. We have catered to expensive computers, pampering them in air-conditioned rooms or carrying them around with us. Purporting to serve us, they have actually forced us to serve them …. [MIT Oxygen Project]
VISION OF PERVASIVE COMPUTING
In the future, computation will be human-centered.
It will be available everywhere but invisible (embedded sensors)
Post-desktop [Mark Weiser, 1988]
FEATURES AND APPLICATION
Features: Transparent interfaces: gesture recognition,
speed recognition Context-aware: location and time
Example of Applications: Print this document to Mr. Risanuri Follow me GUI Smart Building
Knowing user location is key … !
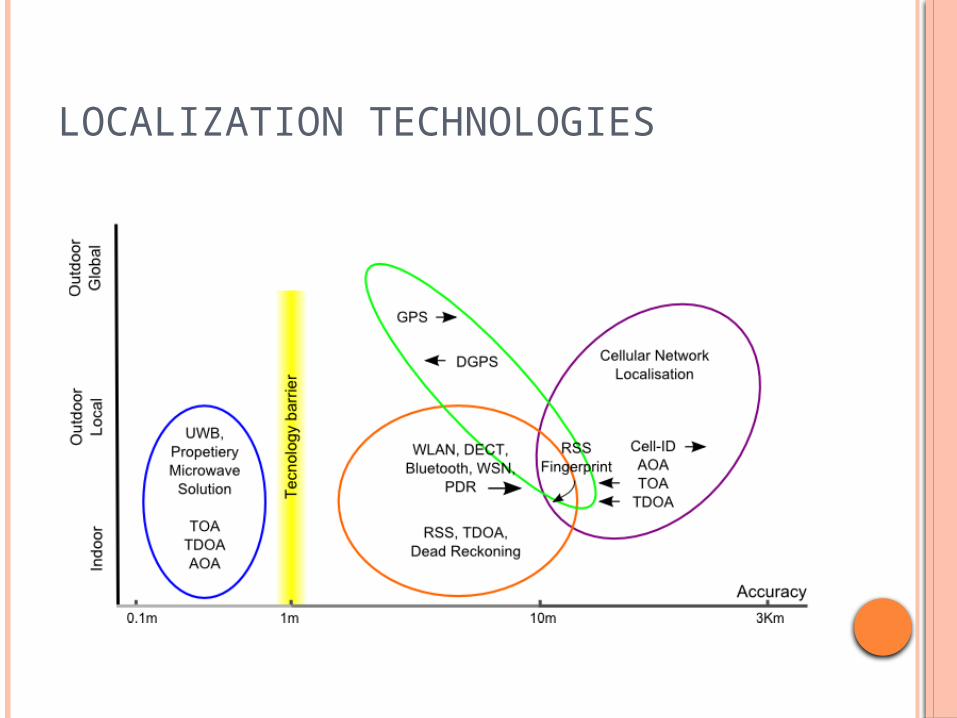
LOCALIZATION TECHNOLOGIES

LOCALIZATION SENSORS
Ultrasound WSN Bluetooth
GPS RFID UWB
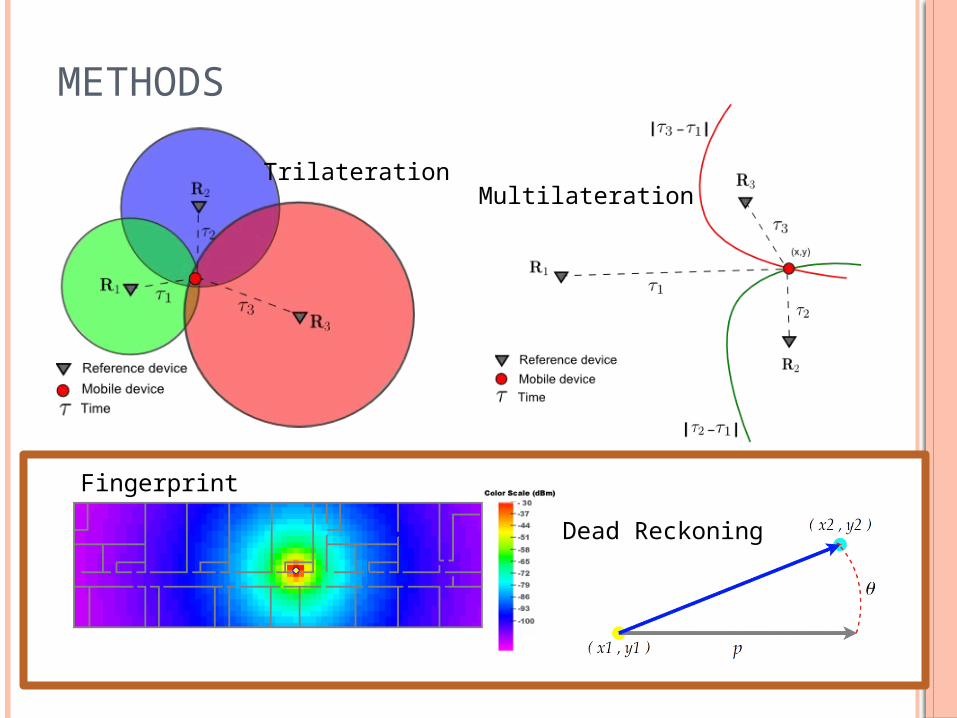
METHODS
TrilaterationMultilateration
Fingerprint
Dead Reckoning

APPLICATIONS
www.ubiaware.com
Industrial : Car Manufacture Healthcare
Retail Logistik
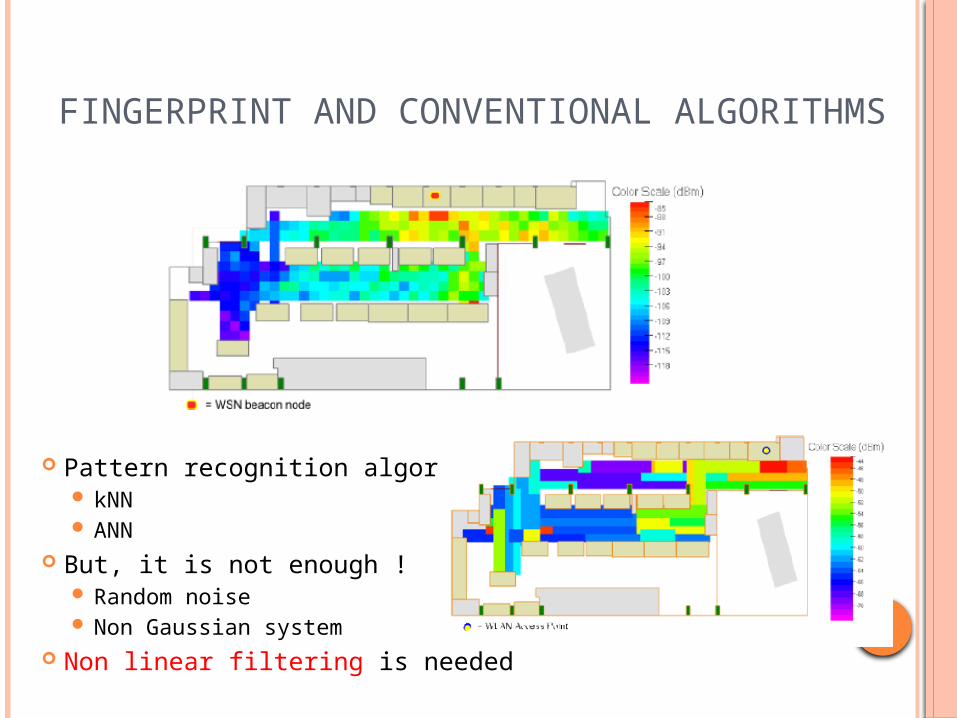
FINGERPRINT AND CONVENTIONAL ALGORITHMS
Pattern recognition algorithm: kNN ANN
But, it is not enough ! Random noise Non Gaussian system
Non linear filtering is needed

BAYESIAN FILTERING
zt-1 zt Zt+1
Xt-1 Xt Xt+1
Hidden Markov Model
ttp zx
ttp xz
1ttp xx
11 ttp zx
1111 ttttttttt dpppkp xzxxxxzzx
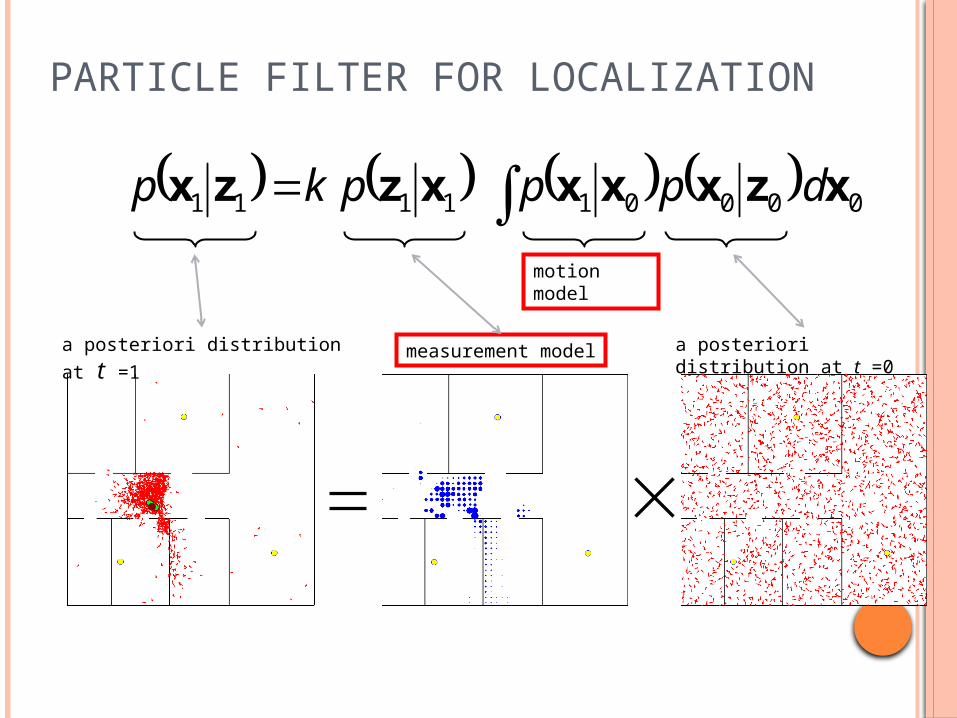
PARTICLE FILTER FOR LOCALIZATION
000011111 xzxxxxzzx dpppkp
a posteriori distribution at t =1
measurement model
a posteriori distribution at t =0
motion model
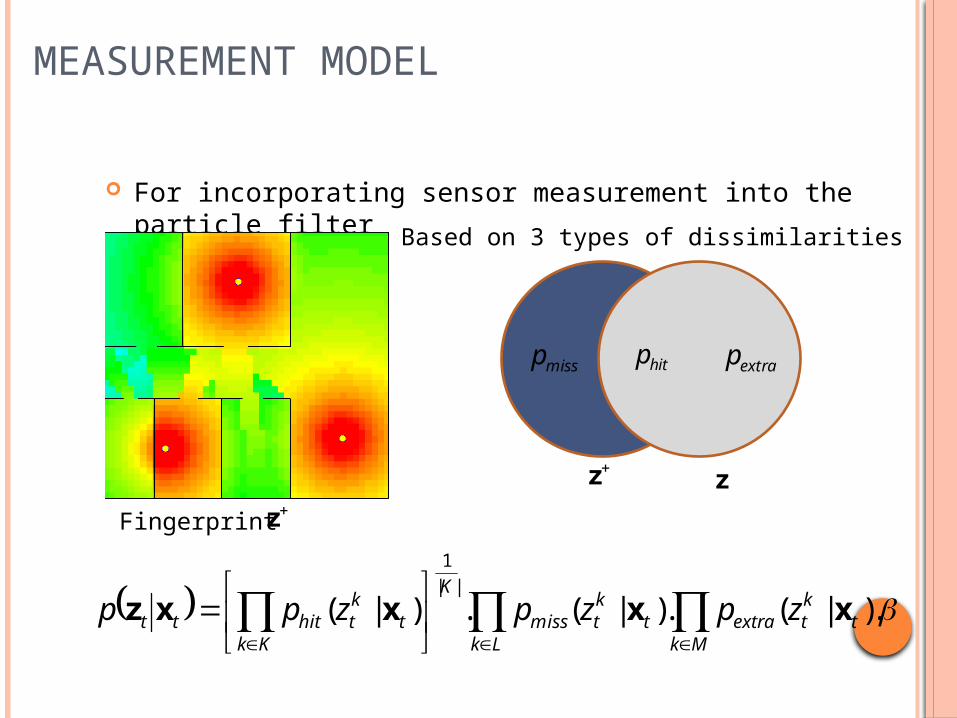
MEASUREMENT MODEL
For incorporating sensor measurement into the particle filter
Fingerprint z
hitpmissp extrap
Based on 3 types of dissimilarities
z z
.)|(.)|(.)|(||
1
Mkt
ktextra
Lkt
ktmiss
K
Kkt
kthittt zpzpzpp xxxxz
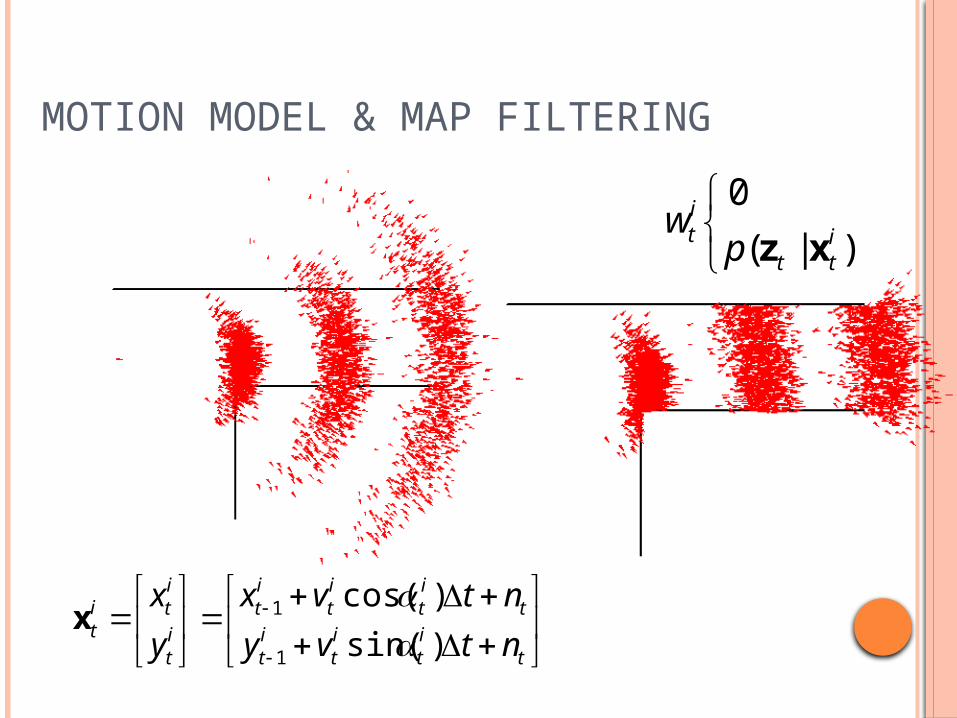
MOTION MODEL & MAP FILTERING
)|(
0itt
it pw
xz
tit
it
it
tit
it
it
it
iti
tntvy
ntvx
y
x
)sin(
)cos(
1
1
x

TEST-BED EXPERIMENT [VIDEO]
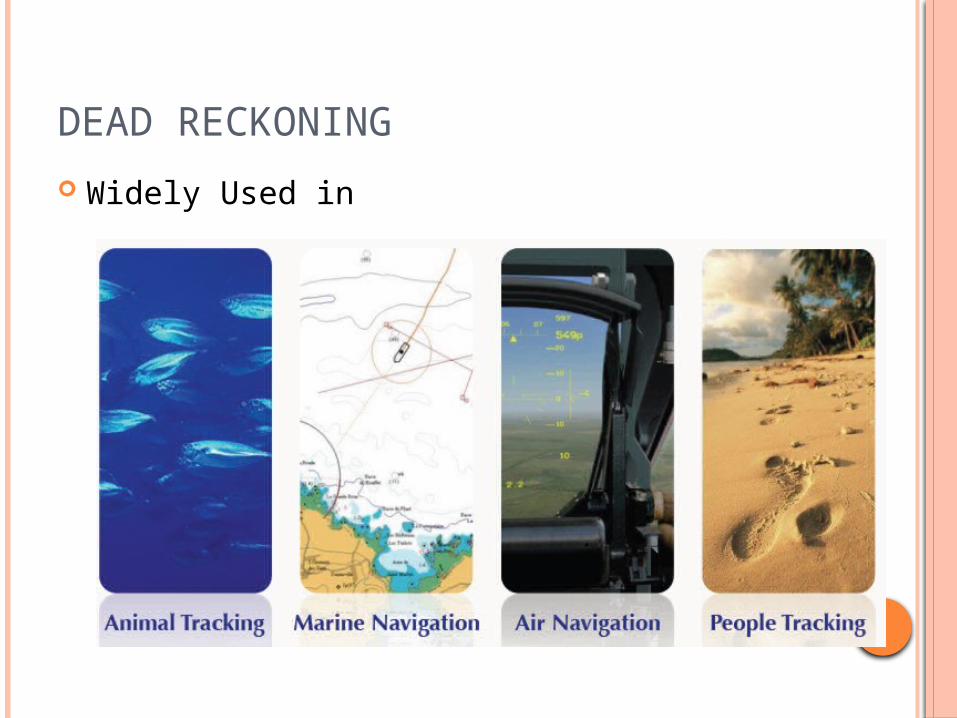
DEAD RECKONING
Widely Used in

SENSORS
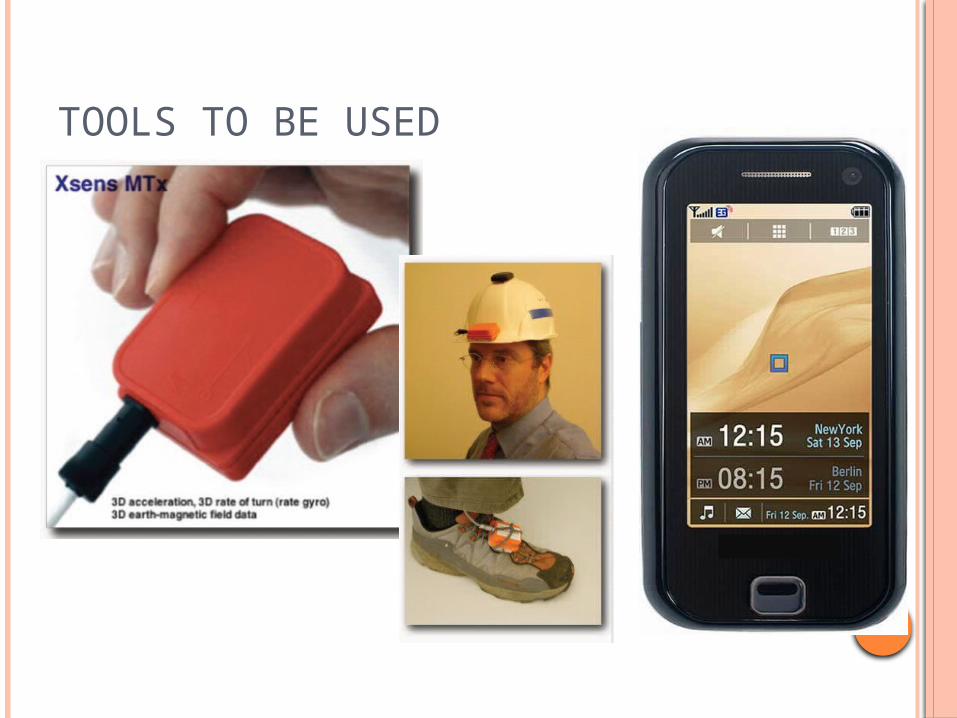
TOOLS TO BE USED
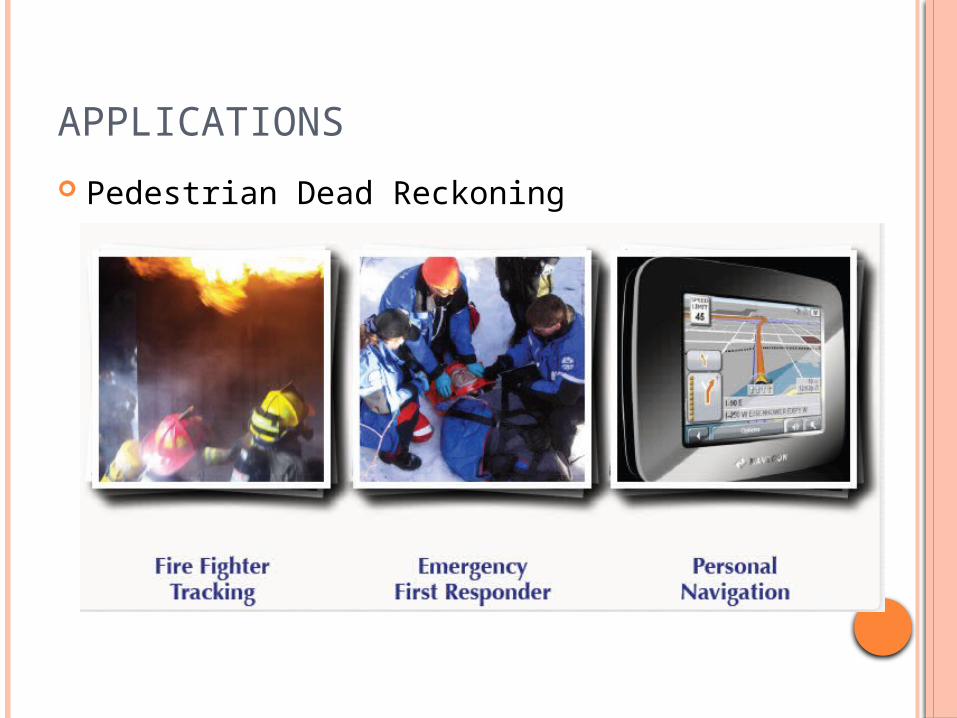
APPLICATIONS
Pedestrian Dead Reckoning

DETECTING THE STEPS
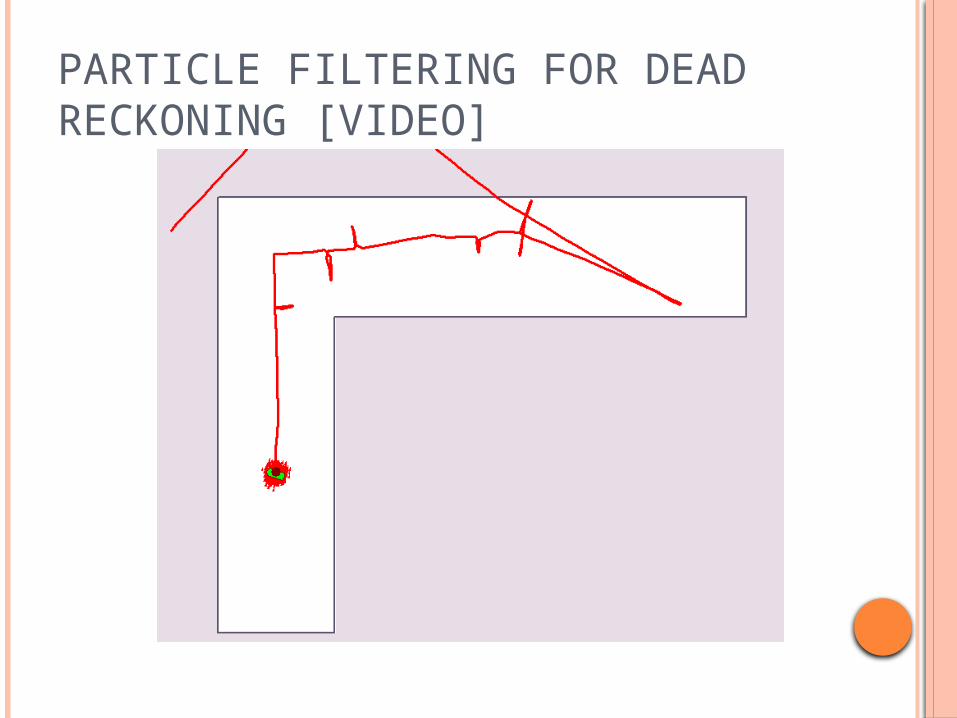
PARTICLE FILTERING FOR DEAD RECKONING [VIDEO]
CHALLENGES AND OPPORTUNITIES
The ubiquity of accurate, low-powered sensors
The ‘killer’ applications Energy saving, assisted living, office/productivity,
convenience ? Standards and interoperability Privacy and Security Internet of things The RTLS market will grow from $153 Million
in 2009 to $2.6 Billion in 2018